Real-Time Tsunami Detection with Oceanographic Radar Based on Virtual Tsunami Observation Experiments


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Tsunami Simulation
3. Virtual Tsunami Observation Experiments
3.1. Synthesis of Virtual Observation Signals
3.2. Real-Time Extraction of Tsunami Velocity Component
3.3. Real-Time Tsunami Detection Method
- Two cross-correlations of radial velocities between two different range cells (, ) were calculated every 1 min from the combinations of ) and ) observed in the period of [, ]. Specifically, was calculated from 00:30 on 1 February 2014 to 23:59 on 28 February 2014, and was calculated for the duration [, ] in each tsunami event, where t0 is the time of tsunami occurrence;
- Frequency distribution of the cross-correlation () in the non-tsunami condition was approximated by a normal distribution;
- When became larger than the top 1% value of after tsunami occurrence, the significance function was set to 1; otherwise was set to 0;
- Finally, tsunami arrival was judged by using the tsunami detection factor defined by Fuji and Hinata [17]:
4. Results and Discussion
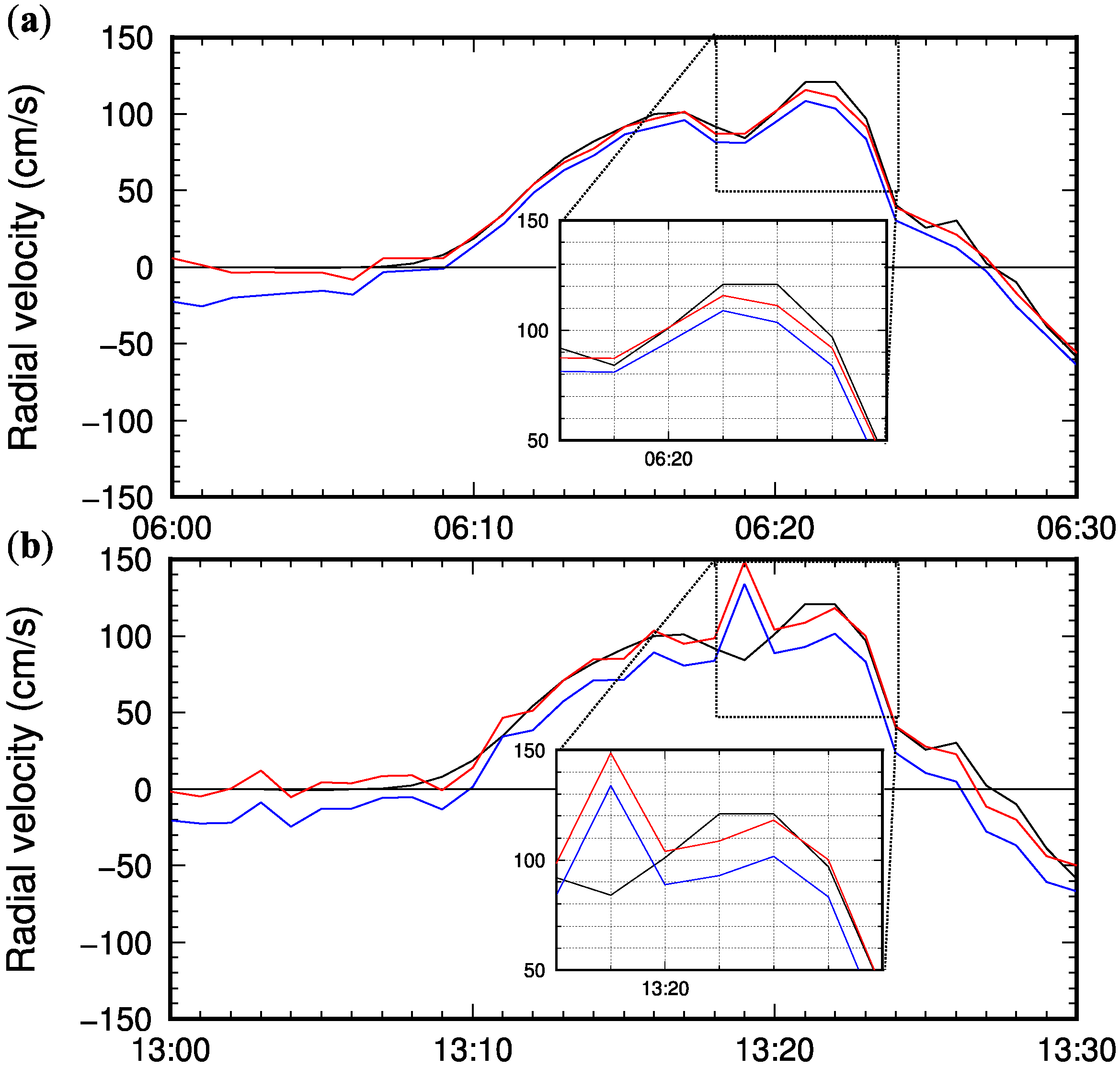
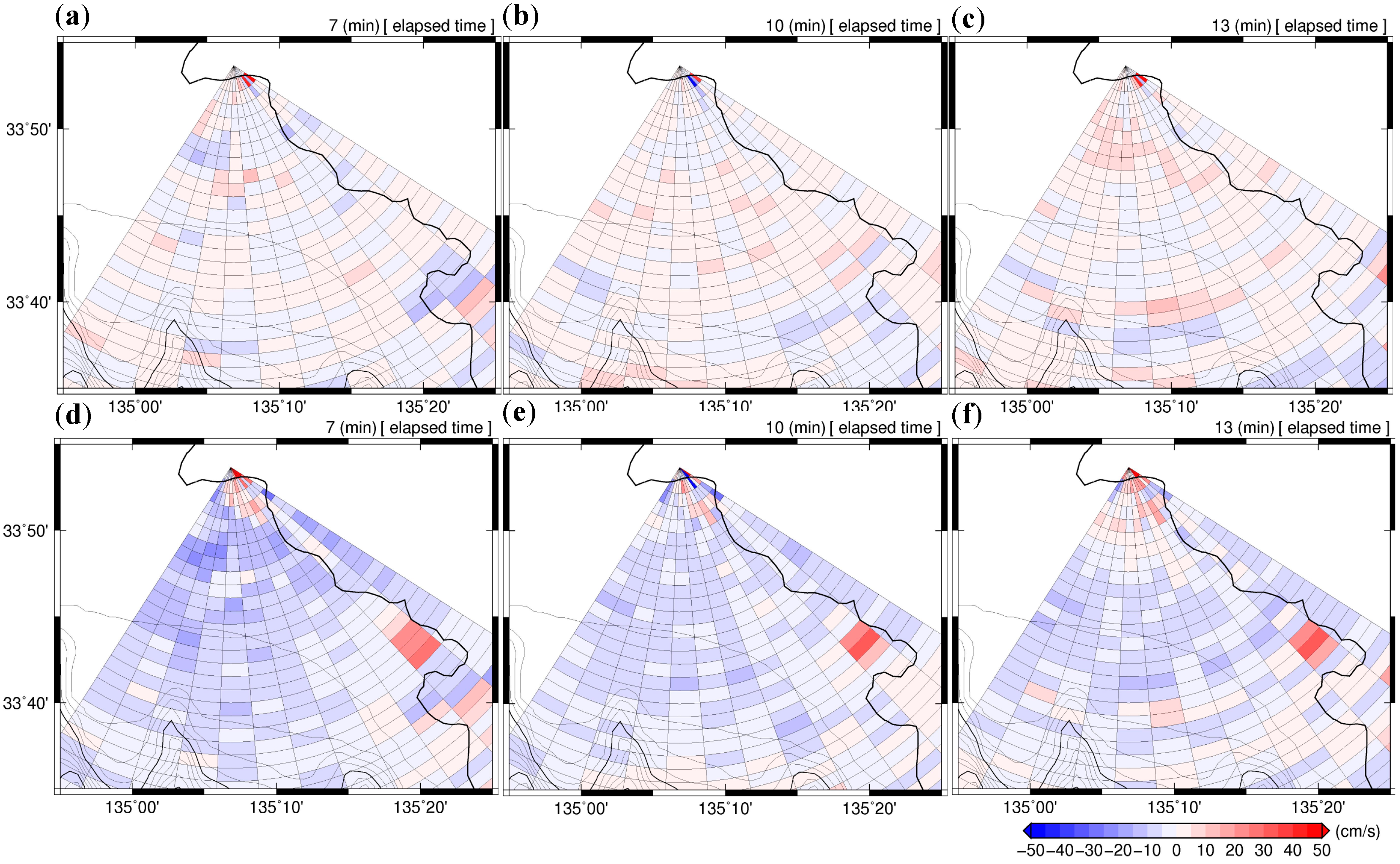
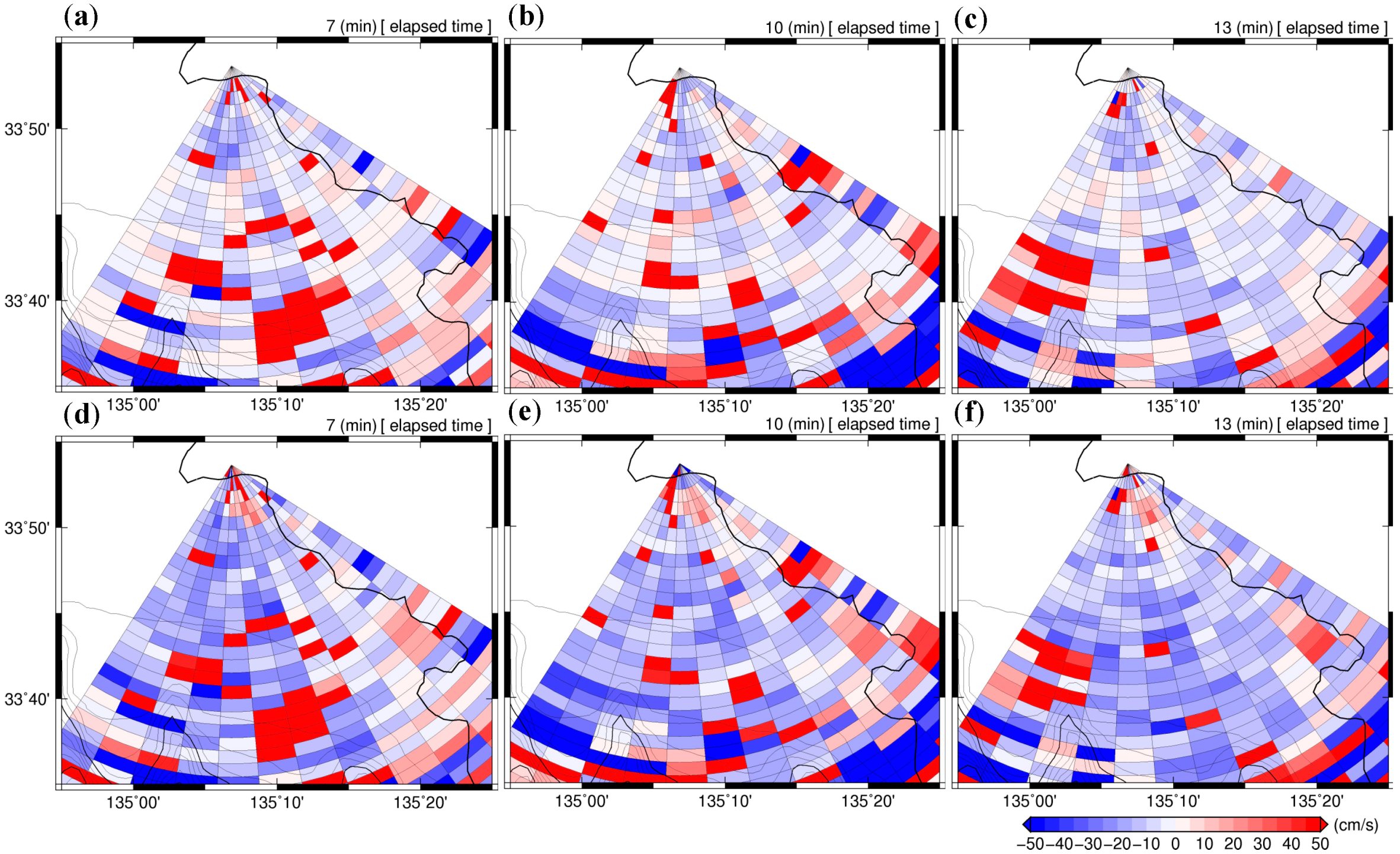
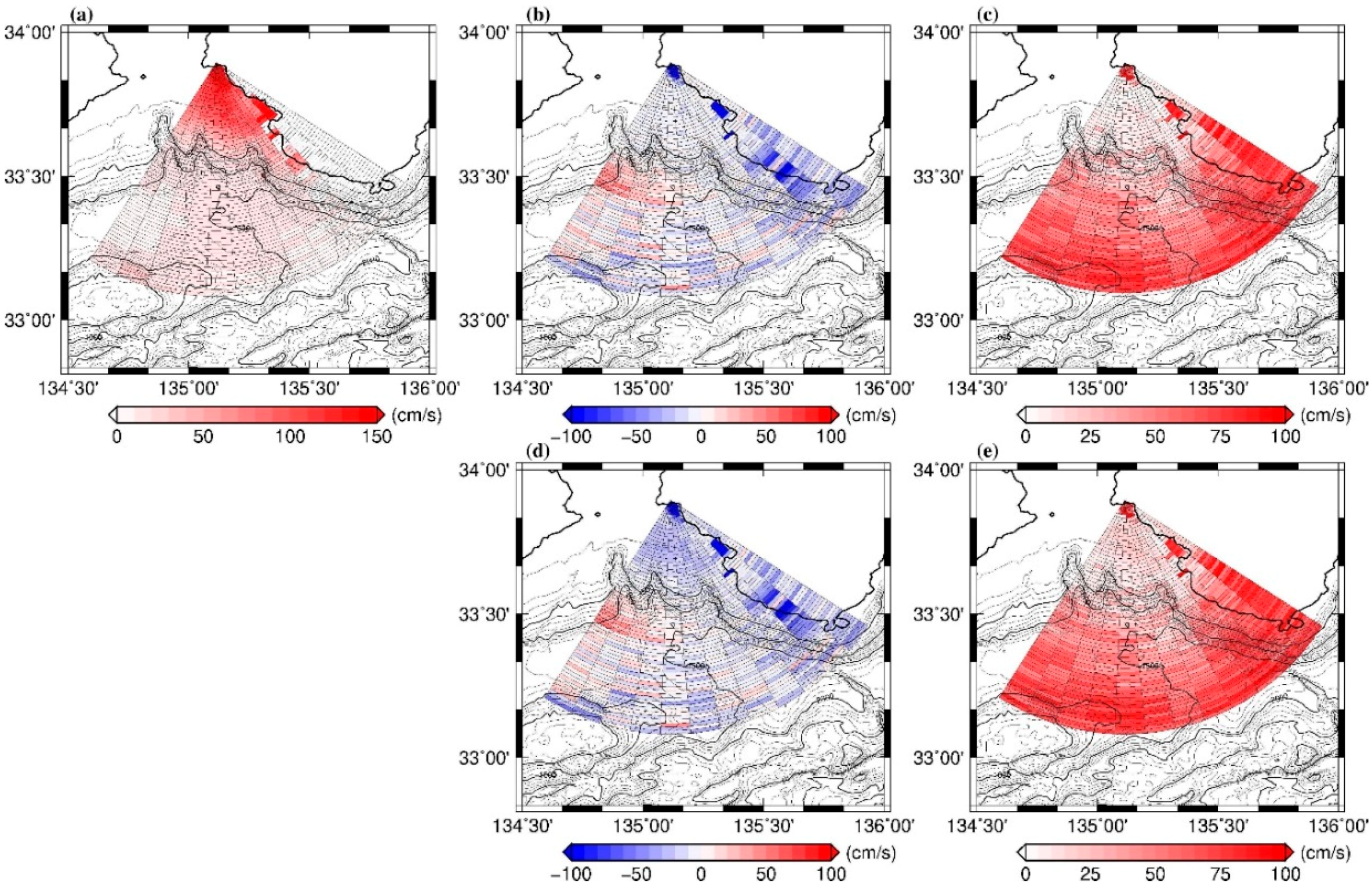
4.1. Comparison of Extracted Tsunami Velocities
4.2. Real-Time Tsunami Detection for 02010600 and 02271300 Scenarios
4.3. Statistical Evaluation of Real-Time Tsunami Detection
5. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Atan, R.; Goggins, J.; Hartnett, M.; Agostinho, P.; Nash, S. Assessment of wave characteristics and resource variability at a 1/4-scale wave energy test site in Galway Bay using waverider and high frequency radar (CODAR) data. Ocean Eng. 2016, 117, 272–291. [Google Scholar] [CrossRef]
- Falco, P.; Buonocore, B.; Cianelli, D.; De Luca, L.; Giordano, A.; Iermano, I.; Kalampokis, A.; Saviano, S.; Uttieri, M.; Zambardino, G.; et al. Dynamics and sea state in the Gulf of Naples: Potential use of high-frequency radar data in an operational oceanographic context. J. Oper. Oceanogr. 2016, 9, s33–s45. [Google Scholar] [CrossRef]
- Kim, S.Y.; Terrill, E.J.; Cornuelle, B.D.; Jones, B.; Washburn, L.; Moline, M.A.; Paduan, J.D.; Garfield, N.; Largier, J.L.; Crawford, G.; et al. Mapping the U.S. West Coast surface circulation: A multiyear analysis of high-frequency radar observations. J. Geophys. Res. 2011, 116, C03011. [Google Scholar] [CrossRef]
- Lipa, B.; Barrick, D.; Alonso-Martirena, A.; Fernandes, M.; Ferrer, M.I.; Nyden, B. Brahan project high frequency radar ocean measurements: Currents, winds, waves and their interactions. Remote Sens. 2014, 6, 12094–12117. [Google Scholar] [CrossRef]
- Lorente, P.; Sotillo, M.G.; Aouf, L.; Amo-Baladrón, A.; Barrera, E.; Dalphinet, A.; Toledano, C.; Rainaud, R.; De Alfonso, M.; Piedracoba, S.; et al. Extreme Wave Height Events in NW Spain: A Combined Multi-Sensor and Model Approach. Remote Sens. 2018, 10. [Google Scholar] [CrossRef]
- Barrick, D. Theory of HF and VHF propagation across the rough sea, 2, Application to HF and VHF propagation above the sea. Radio Sci. 1971, 6, 527–533. [Google Scholar] [CrossRef]
- Barrick, D. A coastal radar system for tsunami warning. Remote Sens. Environ. 1979, 8, 353–358. [Google Scholar] [CrossRef]
- Hinata, H.; Fujii, S.; Furukawa, K.; Kataoka, T.; Miyata, M.; Kobayashi, T.; Mizutani, M.; Kokai, T.; Kanatsu, N. Propagating tsunami wave and subsequent resonant response signals detected by HF radar in the Kii Channel, Japan. Estuar. Coast. Shelf Sci. 2011, 95, 268–273. [Google Scholar] [CrossRef]
- Lipa, B.; Barrick, D.; Saitoh, S.; Ishikawa, Y.; Awaji, T.; Largier, J.; Garfield, N. Japan tsunami current flows observed by HF radars on two continents. Remote Sens. 2011, 3, 1663–1679. [Google Scholar] [CrossRef] [Green Version]
- Dzvonkovskaya, A. Ocean surface current measurements using HF radar during the 2011 Japan tsunami hitting Chilean coast. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 7605–7608. [Google Scholar] [CrossRef]
- Lipa, B.; Barrick, D.; Bourg, J.; Nyden, B. HF radar detection of tsunamis. J. Oceanogr. 2006, 62, 705–716. [Google Scholar] [CrossRef]
- Lipa, B.; Isaacson, J.; Nyden, B.; Barrick, D. Tsunami arrival detection with high frequency (HF) radar. Remote Sens. 2012, 4, 1448–1461. [Google Scholar] [CrossRef]
- Lipa, B.; Barrick, D.; Diposaptono, S.; Isaacson, J.; Jena, B.K.; Nyden, B.; Rajesh, K.; Kumar, T.S. High frequency (HF) radar detection of the weak 2012 Indonesian tsunamis. Remote Sens. 2012, 4, 2944–2956. [Google Scholar] [CrossRef]
- Grilli, S.T.; Grosdidier, S.; Guerin, C.A. Tsunami detection by high-frequency radar beyond the continental shelf. Pure Appl. Geophys. 2016, 173, 3895–3934. [Google Scholar] [CrossRef]
- Guérin, C.A.; Grilli, S.T.; Moran, P.; Grilli, A.R.; Insua, T.L. Tsunami detection by high-frequency radar in British Columbia: Performance assessment of the time-correlation algorithm for synthetic and real events. Ocean Dyn. 2018, 423–438. [Google Scholar] [CrossRef]
- Seto, S.; Takahashi, T. Examination on the observation site of oceanographic radar for tsunami source and propagation in the Nankai trough. J. Jpn. Soc. Civ. Eng. Ser. B 2015, 71, 343–348. [Google Scholar] [CrossRef]
- Fuji, R.; Hinata, H. Temporal variability of tsunami arrival detection distance revealed by virtual tsunami observation experiments using numerical simulation and 1-month HF radar observation. J. Oceanogr. 2017, 73, 1725–1741. [Google Scholar] [CrossRef]
- Fuji, R.; Hinata, H.; Fujii, S.; Nagamatsu, H.; Ogasawara, I.; Ito, H.; Kataoka, T.; Takahashi, T. Tsunami detection based on virtual tsunami observation experiment by using oceanographic radar. J. Jpn. Soc. Civ. Eng. Ser. B 2015, 71, 337–342. [Google Scholar] [CrossRef]
- Gurgel, K.W.; Dzvonkovskaya, A.; Pohlmann, T.; Schlick, T.; Gill, E. Simulation and detection of tsunami signatures in ocean surface currents measured by HF radar. Ocean Dyn. 2011, 61, 1495–1507. [Google Scholar] [CrossRef]
- Okada, Y. Internal deformation due to shear and tensile faults in a half-space. Bull. Seismol. Soc. Am. 1992, 82, 1018–1040. [Google Scholar]













© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ogata, K.; Seto, S.; Fuji, R.; Takahashi, T.; Hinata, H. Real-Time Tsunami Detection with Oceanographic Radar Based on Virtual Tsunami Observation Experiments. Remote Sens. 2018, 10, 1126. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10071126
Ogata K, Seto S, Fuji R, Takahashi T, Hinata H. Real-Time Tsunami Detection with Oceanographic Radar Based on Virtual Tsunami Observation Experiments. Remote Sensing. 2018; 10(7):1126. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10071126
Chicago/Turabian StyleOgata, Kohei, Shuji Seto, Ryotaro Fuji, Tomoyuki Takahashi, and Hirofumi Hinata. 2018. "Real-Time Tsunami Detection with Oceanographic Radar Based on Virtual Tsunami Observation Experiments" Remote Sensing 10, no. 7: 1126. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10071126