1. Introduction
Tropical forests represent an extensive carbon reservoir containing approximately 40% of terrestrial carbon [
1]. The unsustainable use of these forests causes large greenhouse gas emissions, which can be accounted for in form of carbon dioxide equivalents (CO
2-e). Deforestation and forest degradation in the tropics account for approximately 11% of global anthropogenic CO
2 emissions each year [
2]. Particularly tropical, wooded peat lands form an additional carbon reservoir obtained from the forests growing on top. Indonesia’s peatlands approximately store 55–58 Gt of carbon [
3,
4]. Nevertheless, the tropical forests in Indonesia are affected by severe anthropogenic impacts, resulting in significant carbon emissions. Between 1990 and 2010, Borneo lost about half of its original peatland forest. This is mainly due to legal and illegal logging, extensive expansion of plantations, massive peatland drainage, and significant forest fires caused by extreme El Niño droughts in 1997/98, 2009 and 2015. Due to this anthropogenic destruction, Indonesia has become one of the largest greenhouse gas emitters [
5] in the world and a prime target for REDD+ (Reducing Emissions from Deforestation and Forest Degradation) projects [
6]. The REDD+ projects require close monitoring of carbon stocks of forests and their spatial distribution [
7]. Forest carbon stocks are primarily derived based on the assumption that 50% of above-ground biomass (AGB) is carbon [
8]. Biomass itself is defined as the fundamental biophysical parameter quantifying the Earth’s living vegetation [
9]. It describes the amount of woody matter within a forest and is specified by the Global Climate Observing System (GCOS) as an essential climate variable (ECV) [
10]. Thus, the urgency to develop suitable methods for accurate, large-scale detection of canopy height and biomass has increased significantly. Collecting punctual AGB field data is time-consuming and expensive, and only provides limited information about the spatial variability within different forest types.
Remote sensing is able to overcome these limitations. Earth observation approach is able to cover larger areas and in a more cost-effective manner. The inaccessibility of tropical forests is a hindrance for extensive field inventory and highlights the benefits of remote sensing. Radar satellite data has the advantage that it is independent of cloud cover and the time of day [
11]. Especially in tropical regions, cloud coverage is a reoccurring issue that aggravates monitoring based on multispectral satellite data. The extrapolating of accurate forest inventories or regional LiDAR-derived biomass estimations with large-scale satellite imagery represents an appropriate compromise [
12,
13,
14,
15]. Solberg et al. [
16] and Englhart et al. [
17] investigated the suitability of airborne laser scanning (ALS) for extrapolating biomass reference data from field plots. LiDAR data allows for accurate estimates of canopy closure, tree height and AGB based on point cloud metrics [
18,
19]. Many studies have demonstrated a great potential of LiDAR to estimate AGB in tropical forests [
14,
20,
21]. Lidar point height distributions, such as the Quadratic Mean Canopy Height (R
2 = 0.84) and Centroid Height (R
2 = 0.75, RMSE = 20.5 t ha
−) [
22,
23] were identified as appropriate parameters to estimate AGB from LIDAR data. Kronseder et al. [
20] found an R
2 = 0.83 for LiDAR based AGB estimates in Indonesia’s peat forests. Besides, Englhart et al. [
24] derived an R
2 of 0.81 in tropical forests of Kalimantan, Indonesia and presented a robust application of LiDAR derived forest estimates. LiDAR provides accurate AGB estimations and was therefore used to extrapolate field inventory data for large-scale analysis based on Pol-InSAR data.
Other studies have successfully demonstrated the derivation of canopy height and AGB using polarimetric SAR interferometry (Pol-InSAR) techniques. Pol-InSAR is a remote sensing method that enables the investigation of the 3D structure of volume scatterers, such as forests. This results from the fact that the interferometric coherence is directly related to the vertical distribution of the backscattering elements and thus allows an exact 3D localization of the scattering center of an object. Using a coherent combination of single- and multi-baseline interferograms with different polarizations enables the characterization of vertical forest structure. Model based canopy height retrieval using Pol-InSAR data has been widely established and validated. The Random Volume over Ground (RVoG) model is often used for canopy height estimation from Pol-InSAR data as it interprets interferometric coherence as a function of vertical backscatter profiles [
25,
26,
27]. Different studies have applied this model at various frequencies whereby the results were partly dependent on forest density [
28,
29]. A comparison of airborne X-, L-, and P-band Pol-InSAR data showed that L- and P-band achieved a lower variance in canopy height estimation than the X-band based canopy height derivation [
30]. The INDREX-II campaign by the German Aerospace Center (DLR) provided airborne X-, C-, L-, and P-band InSAR and Pol-InSAR data in tropical peat swamp forests on Borneo [
31]. The authors found a good applicability of the RVoG model in tropical forests for both, L- and P-band, even if P-band estimations are on average higher than L-band estimations. In the context of INDREX-II, Hajnsek et al., [
32] showed that canopy height determination is possible in Indonesian forests with L- and P-Band estimates within a 10% accuracy. The L-band estimates showed an R
2 of 0.91, while the P-band estimates were characterized by an R
2 of 0.94. Interferometric X-band data also provided an accurate estimate (R
2 in a range from 0.51 to 0.94) and underlined the high potential of Terra-SAR-X and Tandem-X X-band Pol-InSAR data for canopy height derivation. Kugler et al. [
33] successfully derived the canopy height from TandDEM-X Pol-InSAR data in boreal, temperate and tropical forests. The authors achieved correlations between R
2 of 0.86 (boreal forest), R
2 of 0.77 (temperate forest), and R
2 from 0.54 to 0.69 (tropical forest) for dual-pol data. Besides X-, L-, and P-band, C-band Pol-InSAR data has been used only to a very limited extent for the derivation of canopy height [
34]. Varekamp et al. [
35] concluded in their study that C-band InSAR data are more suitable for canopy simulation than X-band InSAR data. The combination of X- and C-band Pol-InSAR data has only been used to a very limited extent for the determination of canopy heights in tropical forests so far.
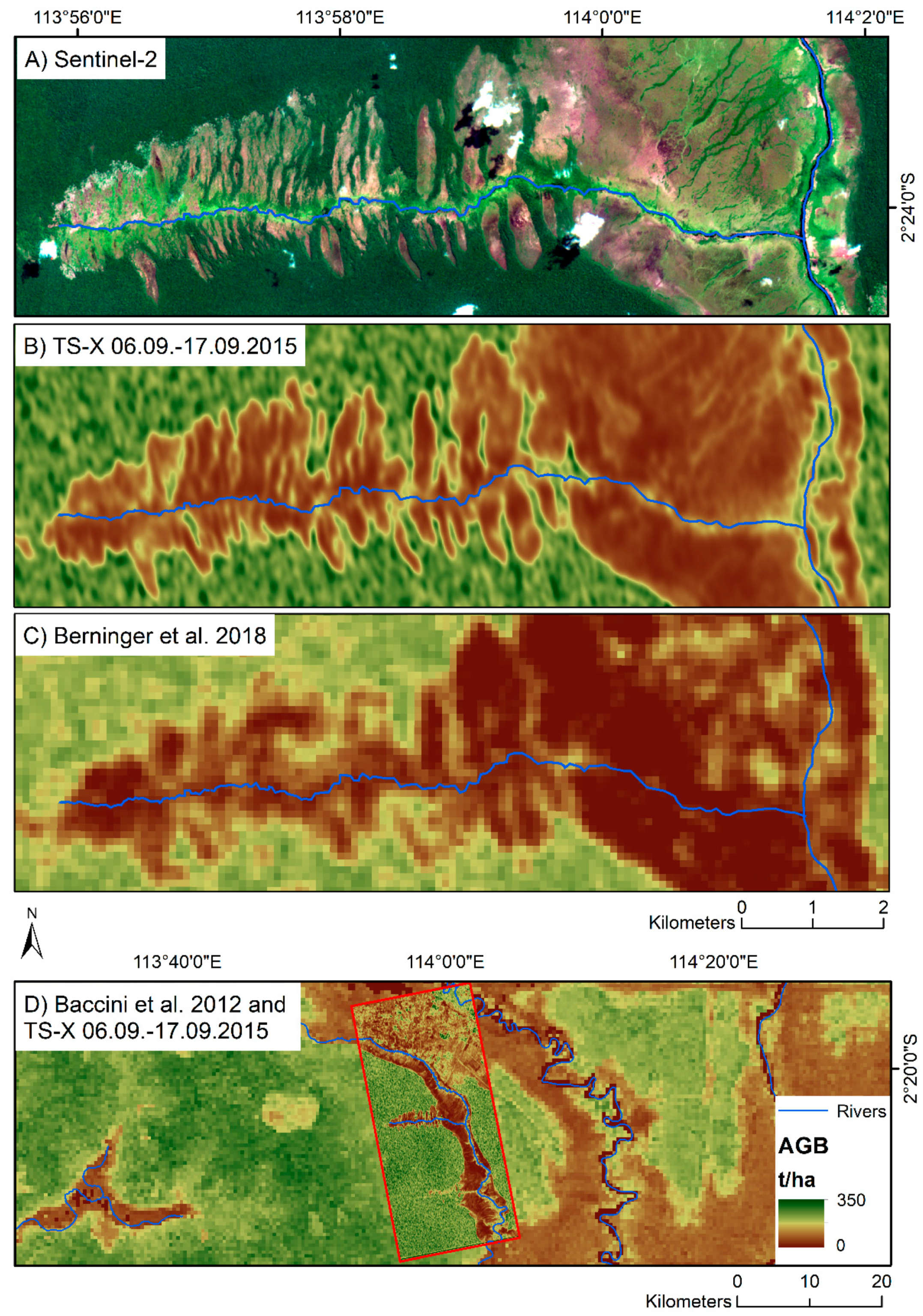
This study analyzes the use of TerraSAR-X (X-band) and RADARSAT-2 (C-band) Pol-InSAR datasets for the determination of canopy height in tropical peat forests in Indonesia based on different wavelengths, acquisition parameters, and weather conditions. (i) First, the suitability of two different inversion models, Random Volume over Ground (RVoG) and Random Motion over Ground (RMoG), regarding their performance modelling canopy height from X- and C-band Pol-InSAR data was investigated. (ii) Secondly, regional regression models were set up based on the canopy height in order to model AGB on a high-resolution basis. Canopy height and above-ground biomass (AGB) derived from field inventory and LiDAR data were used as reference data for model calibration and validation. The resulting canopy height and AGB maps ranging in resolution from 3–12 m allows a monitoring of even small-scaled changes in the forests of Indonesia. This higher spatial resolution is important in order to make them a promising alternative building a forest monitoring or risk managing system, but also to achieve the objectives of REDD+, UNEP-WCMC, the Global Canopy Programme, and other programs protecting forests or analyzing carbon release at national and subnational levels.
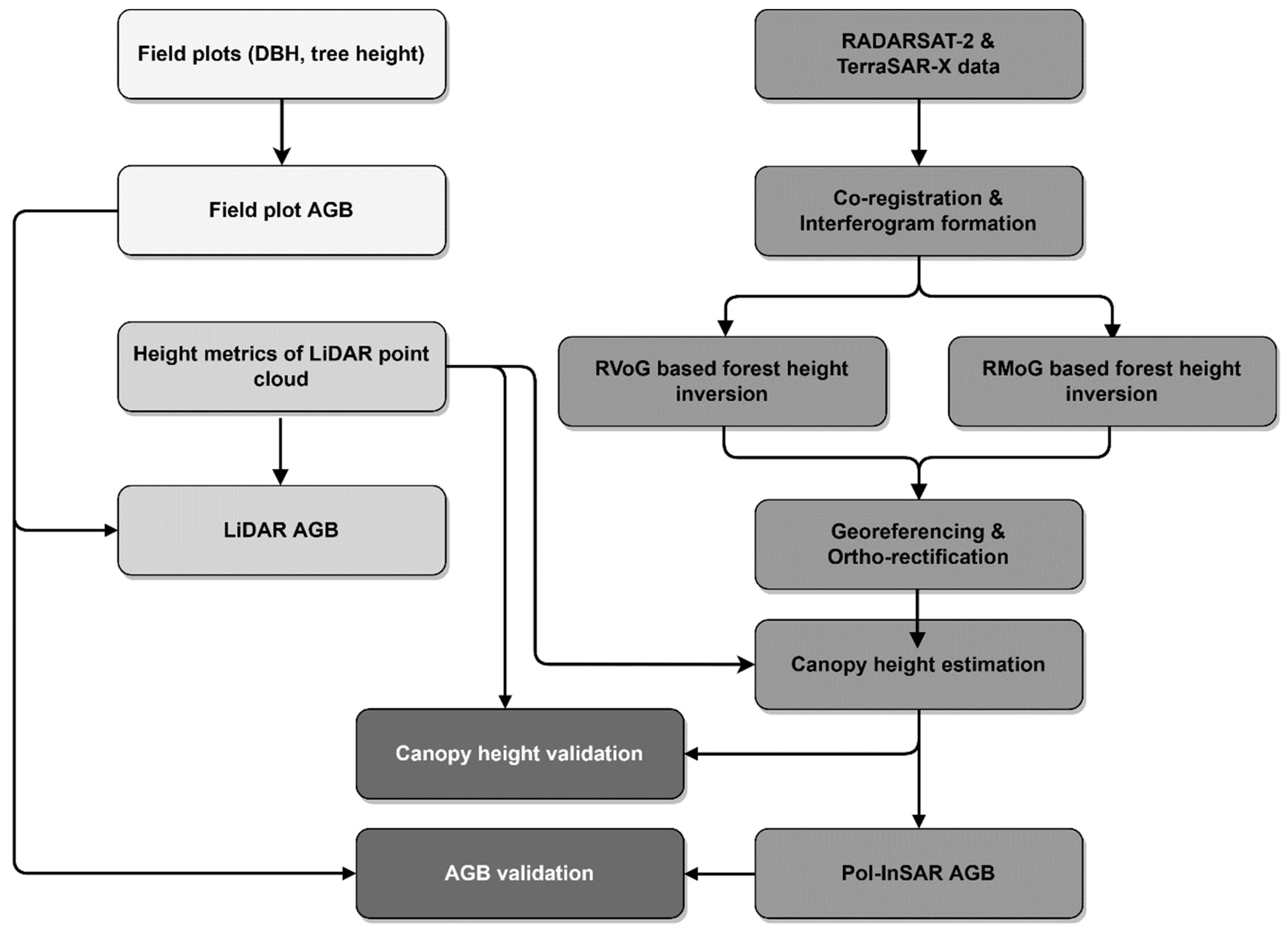
3. Methods
An overview of this study’s workflow is displayed in
Figure 2. The applied steps are described in the following section in detail.
3.1. Extrapolated Reference Data
Canopy height from LiDAR data and AGB based on field inventory and LiDAR height metrics are used as reference data, representing the highest possible accuracy, for model calibration and validation. In a first step, a Digital Surface Model (DSM) was estimated from the hierarchical filtered highest points of the LiDAR point cloud. Besides, the DTM (Digital Terrain Model) with a resolution of 1 m was calculated from the filtered ground points of the 3D LiDAR point cloud [
23,
40]. By subtracting the DTM from the LiDAR DSM, a very accurate determination of the canopy height became possible. The final Canopy Height Model (CHM) based on LiDAR data has a spatial resolution of 1 m and is resampled to the respective Pol-InSAR data.
The field inventory data enabled the estimation of AGB in t ha
−1 by using the tree height, DBH, and wood specific density of each tree as the input for a combination of different allometric models. We applied allometric models according to [
41] for saplings (DBH < 5 cm and height ≤ 1.3 m) and small trees (DBH < 5 cm and height > 1.3 m) and based on [
42] for moist tropical forest stands (DBH ≥ 5 cm and height > 1.3 m). The applied models are described in detail in [
24]. In a next step this ground-based AGB in t ha
−1 was related to the LiDAR transects in order to estimate AGB reference data based on centroid height derived from LiDAR using previously established regression models [
23,
24]. For each AGB grid cell, we computed the LiDAR height histograms by normalizing all points within a grid of 20 m (the same radius as the field plots) using the DTMs as ground reference as in [
23,
24]. The regression models are based on a combination of a power function in the lower biomass range and a linear function in the higher biomass range using the centroid height to calculate a certain threshold [
24]. The centroid height is an appropriate height parameter of the LiDAR point cloud. The threshold of the centroid height was determined by increasing the value in steps of 0.001 m by identifying the lowest RMSE. The resolution of the final AGB map is 5 m and is resampled to the respective Pol-InSAR data. This extrapolating from field inventory data to LiDAR transects allows the creation of numerous biomass reference data for the calibration of SAR images.
In addition, inventory plots and surrounding areas were covered during a drone mission, approximately 270 ha. With the use of a Semi-Global Matching (SGM), a dense stereo-matching procedure, a 3D point cloud was created from the captured aerial photos. Similar to the LiDAR point cloud, a DSM was derived from this point cloud, which allowed a very precise determination of the canopy height minus the existing LiDAR DTM. We compared the unmanned aerial vehicle (UAV) derived canopy height to the LiDAR derived canopy height resulting in a correlation of 0.89.
3.2. SAR Processing
We applied a speckle reduction using the Refined Lee filter. Besides filtering, the co-registration of repeat pass SAR data is fundamental for generating an interferogram, as it ensures that a target on the ground corresponds to the same pixel in the master as in the slave image. This step compensates for different sensor attitudes, orbit crossings, along- and across track shifting and different sampling rates. After co-registrating the image pairs, we computed an interferogram, also called the phase difference, for each pixel. The interferogram of two registered complex images was calculated by the multiplication of one image with the conjugate of the second image [
43].
In a next step, we smoothed the interferogram by using an adaptive filter based on the local fringe spectrum. The goal of the adaptive filter was to reduce phase noise, thereby reducing the number of residues. It read the complex valued interferogram, computed the interferogram power spectrum, designed a filter based on the power spectrum, filtered the interferogram, estimated the phase noise coherence value for the filtered interferogram and finally wrote the filtered interferogram.
3.3. Canopy Height Estimation
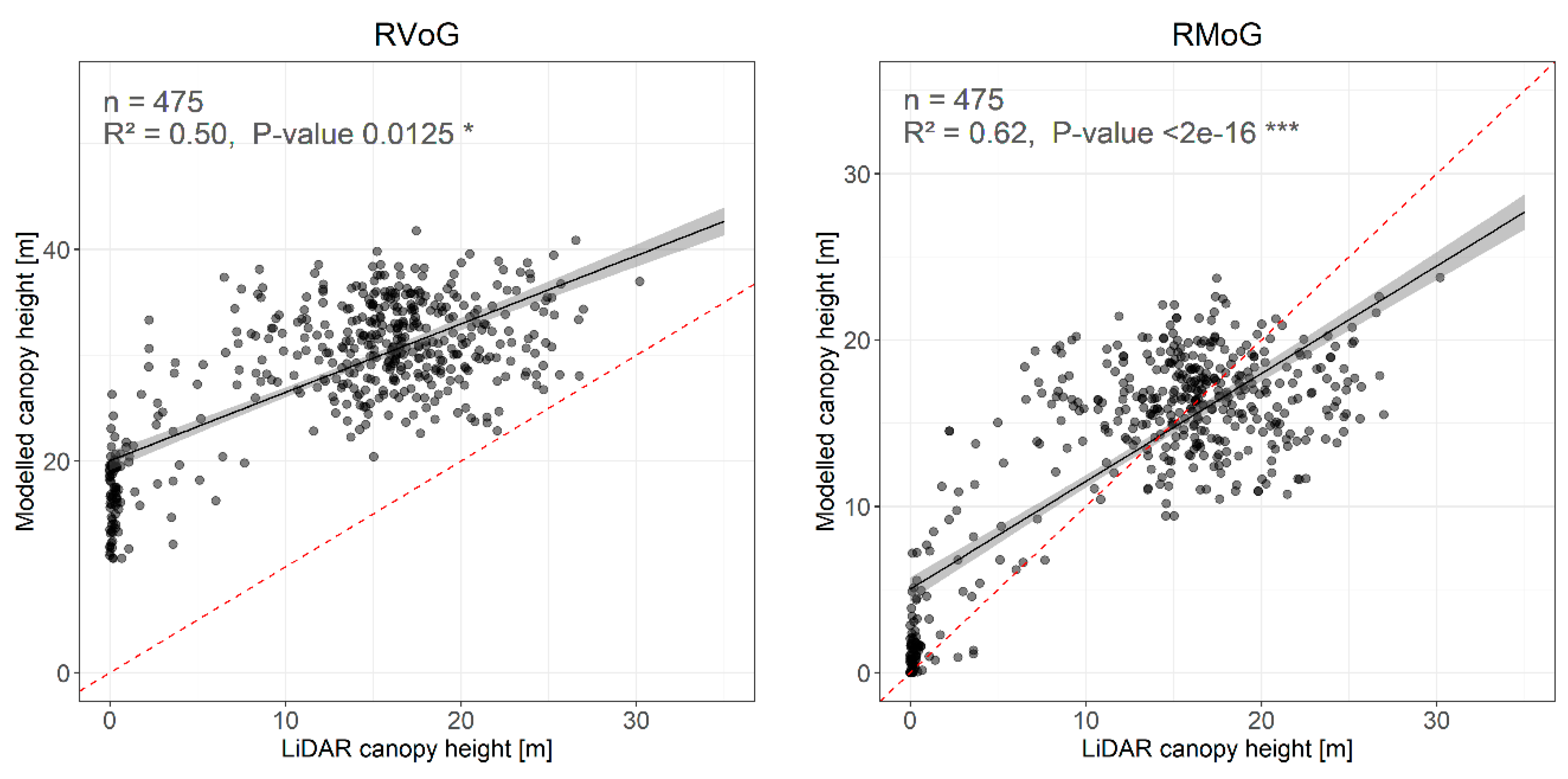
We tried two inversion models in order to estimate canopy height, the RVoG and the RMoG model. The RVoG model is a simple two-layer model, in which one layer represents the forest canopy and the other a reflective ground layer below the vegetation layer. It simulates vegetation as a homogeneous layer of thickness (
hv) containing volume scatterers with randomly oriented particles over a ground scatterer positioned at
z. The model ignores the even-bounce scattering mechanism as well as higher order interactions. Pol-InSAR data is commonly used as input because it provides a number of independent parameters for modelling [
26].
The RVoG presents the interferometric coherence
as
where φ
0 is the phase and refers to the topography of the ground,
m is the effective ground-to-volume amplitude ratio. The complex coherence
for the volume is given as [
44,
45,
46]
with
ϴ0 as the mean incidence angle, the assumption of an exponential distribution of all scatterers is a widely used approach, especially at higher frequencies such as X- and C-band [
33].
depends on the extinction coefficient for the random volume
σ and its thickness (
hv). The variable
dz is defined as an independent distributed random variable that represent the physical displacement of scatterers along z. The effective vertical interferometric wavenumber
kz depends on the wavelength
λ and the imaging geometry as the difference of the incidence angle Δ
ϴ [
44]
The RMoG links the RVoG coherence model with the temporal coherence model and volumetric decorrelation to overcome those limitations [
47]. The RMoG model separates temporal and volumetric decorrelations into four structural parameters and two dynamic parameters. The structural parameters are the tree height, wave extinction, ground topography and ground-to-volume ratio. The dynamic parameters are known as ground and canopy motion standard deviations induced by the temporal baseline [
47].
The complex coherence
in the RMoG model is defined as
where the scatterer motion function
(z) is obtained from
with h
r as reference height, which is a constant,
λ is the wavelength of the SAR system, and
σg and
σv are the ground and vegetation layer motion standard deviation. The term
p(z) is the structure function defining the vertical structure of the vegetation layer [
47,
48]. The structure of trees is assumed as a Gaussian function.
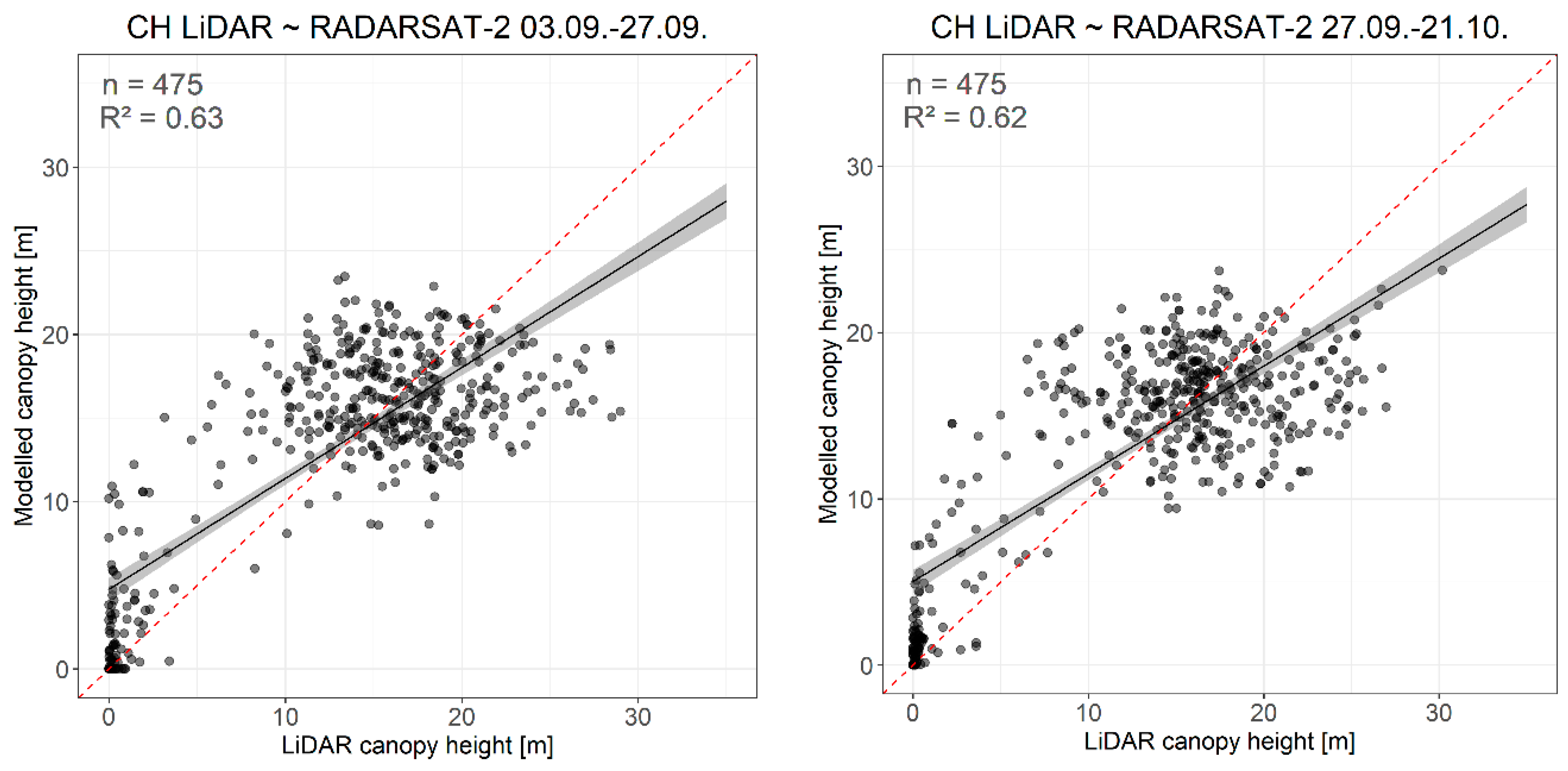
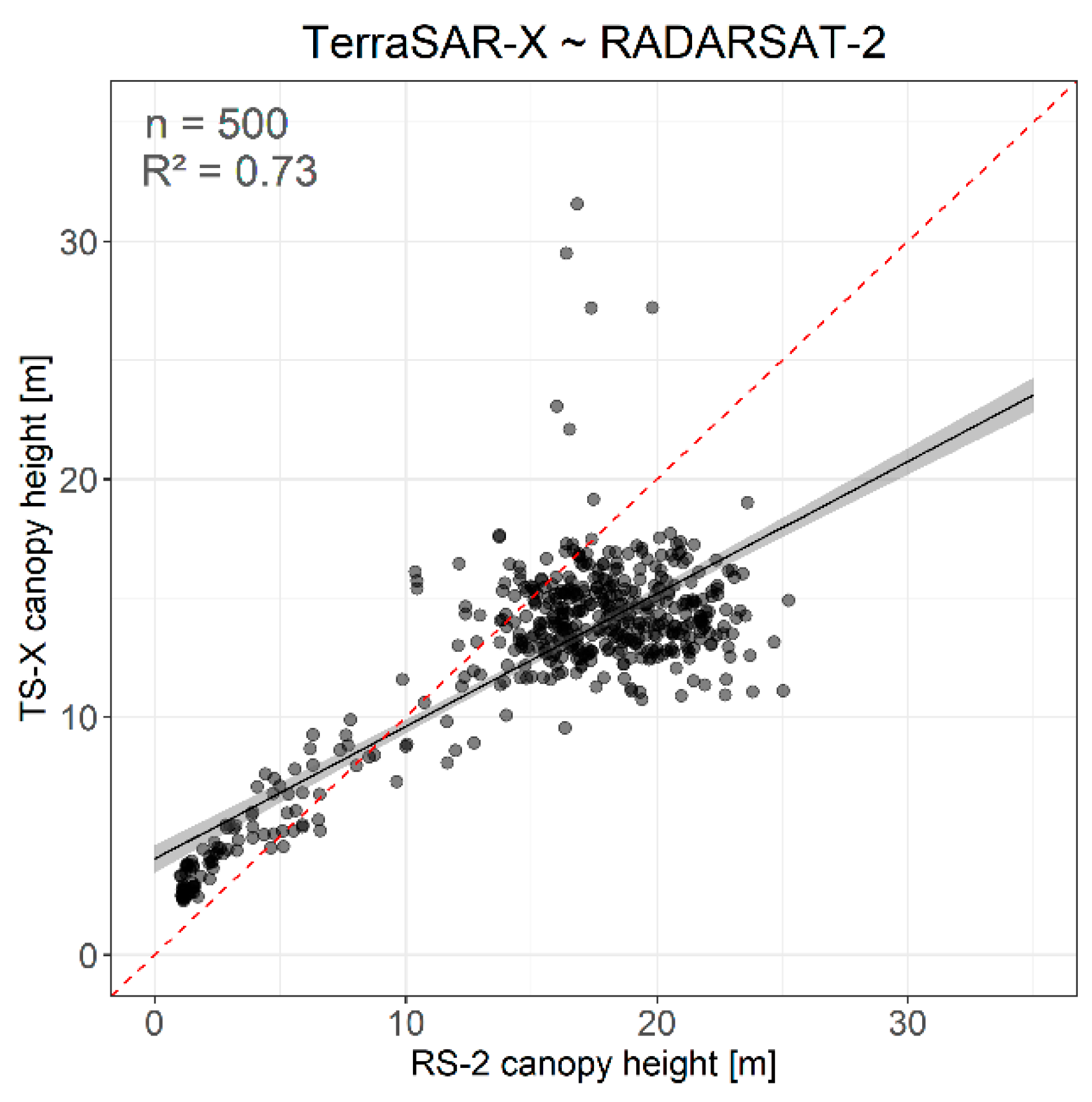
To compare the estimation results with each other as well as with the ground truth, we applied geo-referencing and ortho-rectifications. As a result, each pixel was mapped to a geographical location (longitude and latitude). After modelling the canopy height, an overestimation of the model was identified in the RS-2 results. For minimizing this overestimation, a linear correction factor of −1.4 m was applied on the final canopy height results of the RS-2 datasets.
3.4. SAR Based AGB Modelling
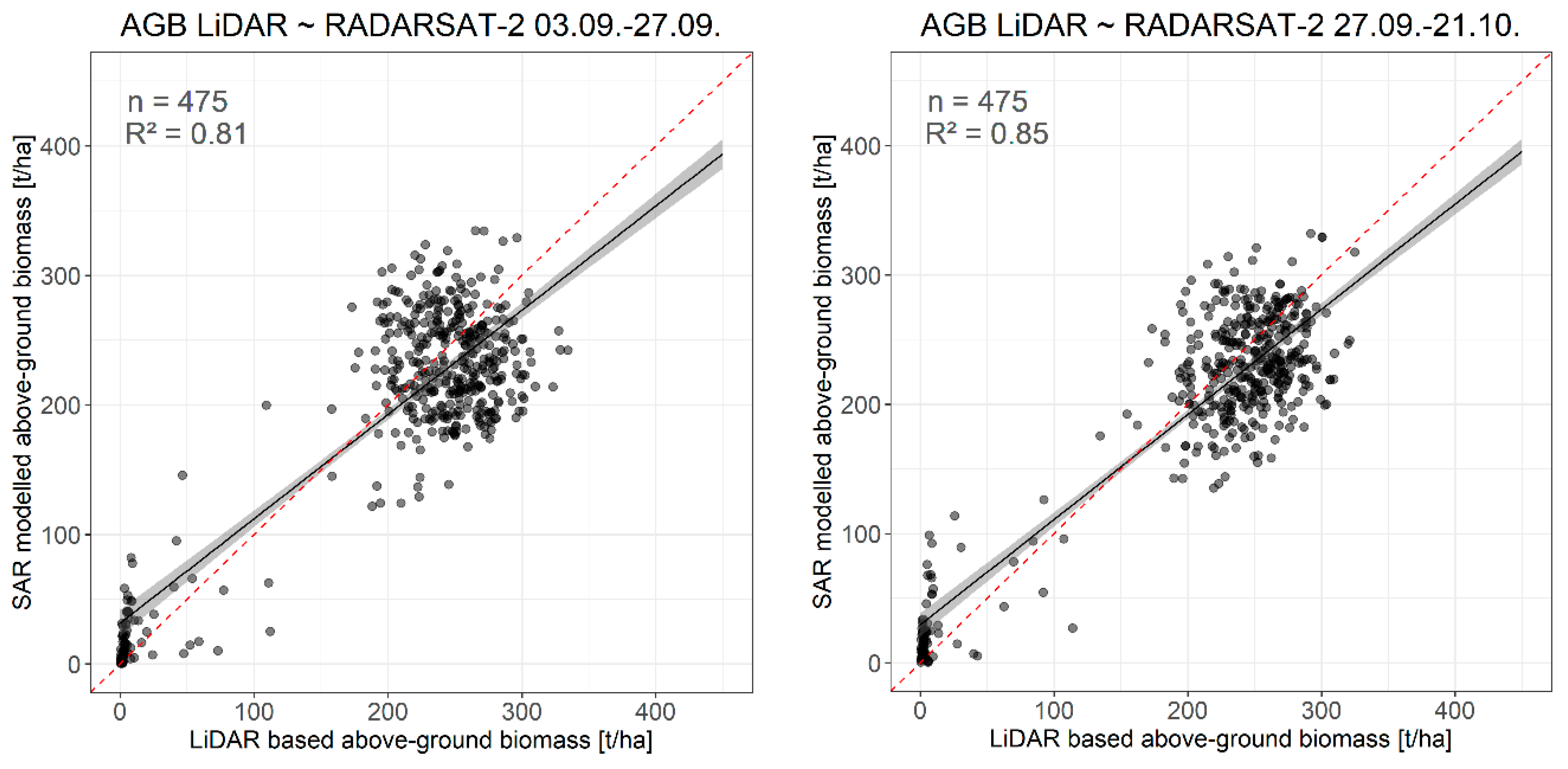
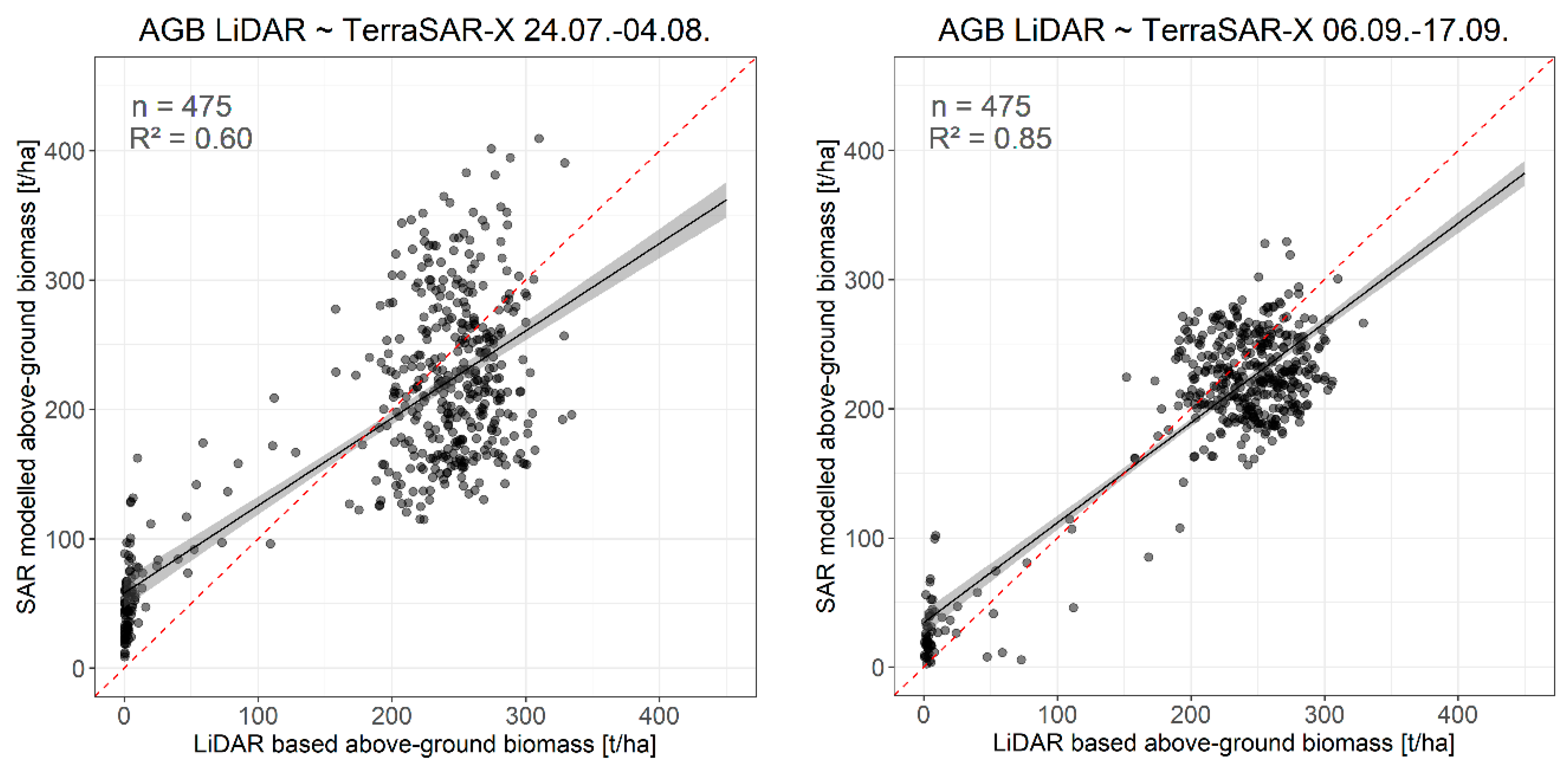
In a next step, we used Pol-InSAR based canopy height and LiDAR AGB as reference to set up a linear regression model for each scene based on 500 randomly selected pixels in the overlapping area. AGB was modelled for each scene based on the respective linear regression equation. Using the Cook’s distance (Cook’s D), influential outliers were removed from the set of predictor variables [
49]. The Cook’s D identifies points with large residuals based on the observation’s leverage and the residual values, and thus influential outliers. Following this approach points over 4/n, where n is the number of observations, are removed from the modelling process [
49]. The final resolution of the Pol-InSAR AGB maps is 3 and 12 m depending on the used sensor.
3.5. Validation
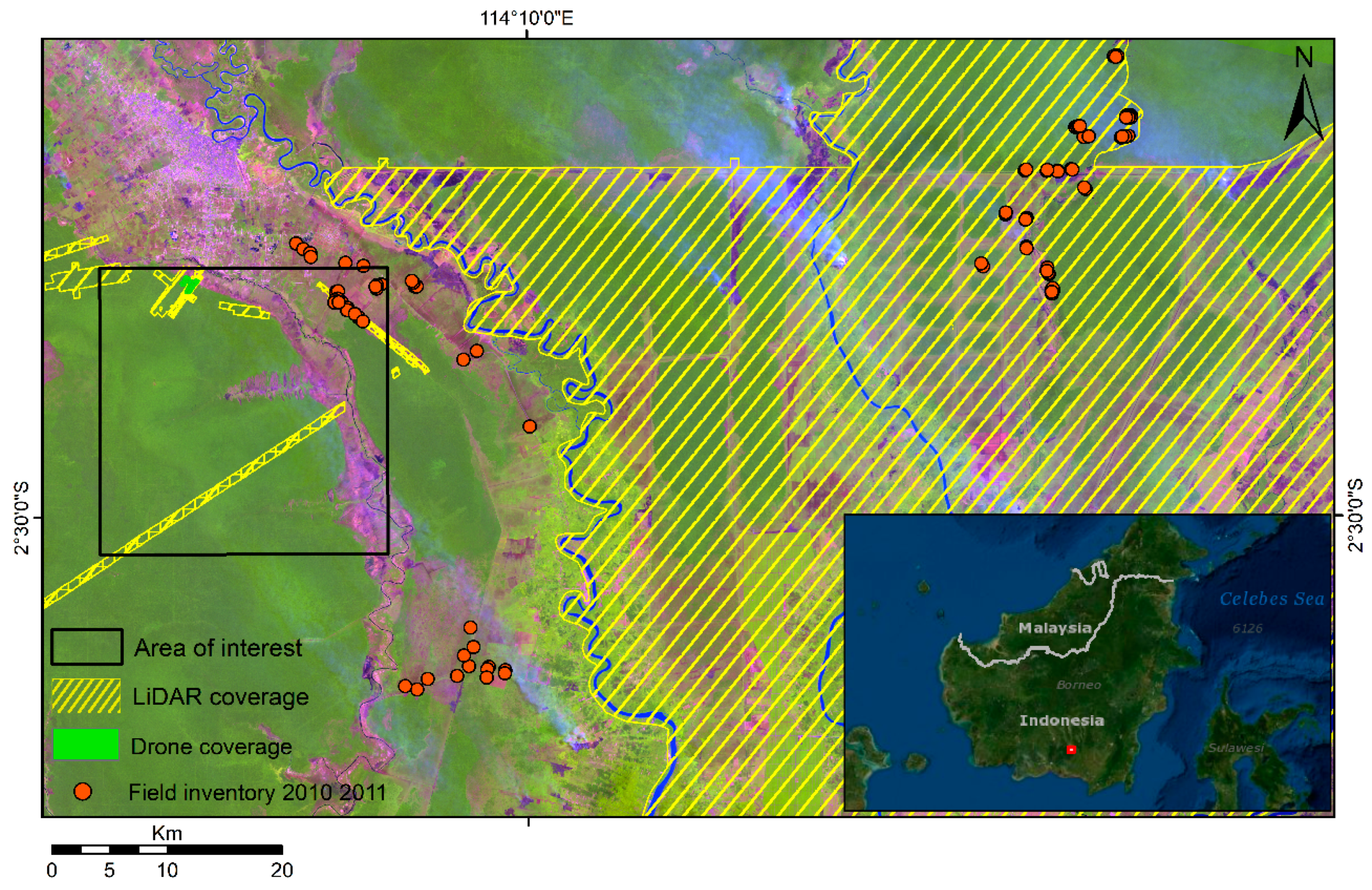
The validation of the estimated canopy height and modelled AGB is achieved using the reference data of the canopy height estimated from the drone DSM in combination with LiDAR DTM. A random sampling strategy was applied in ArcGIS (ESRI) to collect 475 randomly selected pixel within an overlapping area of the drone, as well as the LiDAR reference data and the modelled canopy height. Our drone data was acquired one year after the SAR data, and the LiDAR data was acquired four years before the SAR data. Nevertheless, the coverage of the drone data with the Pol-InSAR data is just about 270 ha. The LiDAR data on the other hand covers, depending on image, more than 4000 ha of the Pol-InSAR scenes. To overcome the limitations of the small coverage of the UAV data, the validation for canopy height is achieved based on both reference datasets within the respective overlapping areas. Since drone data is only available for canopy height, AGB is validated entirely with LiDAR modelled AGB. The resolution of the AGB validation datasets is resampled to the resolution of the respective SAR based canopy height and AGB map (3–12 m).
6. Conclusions
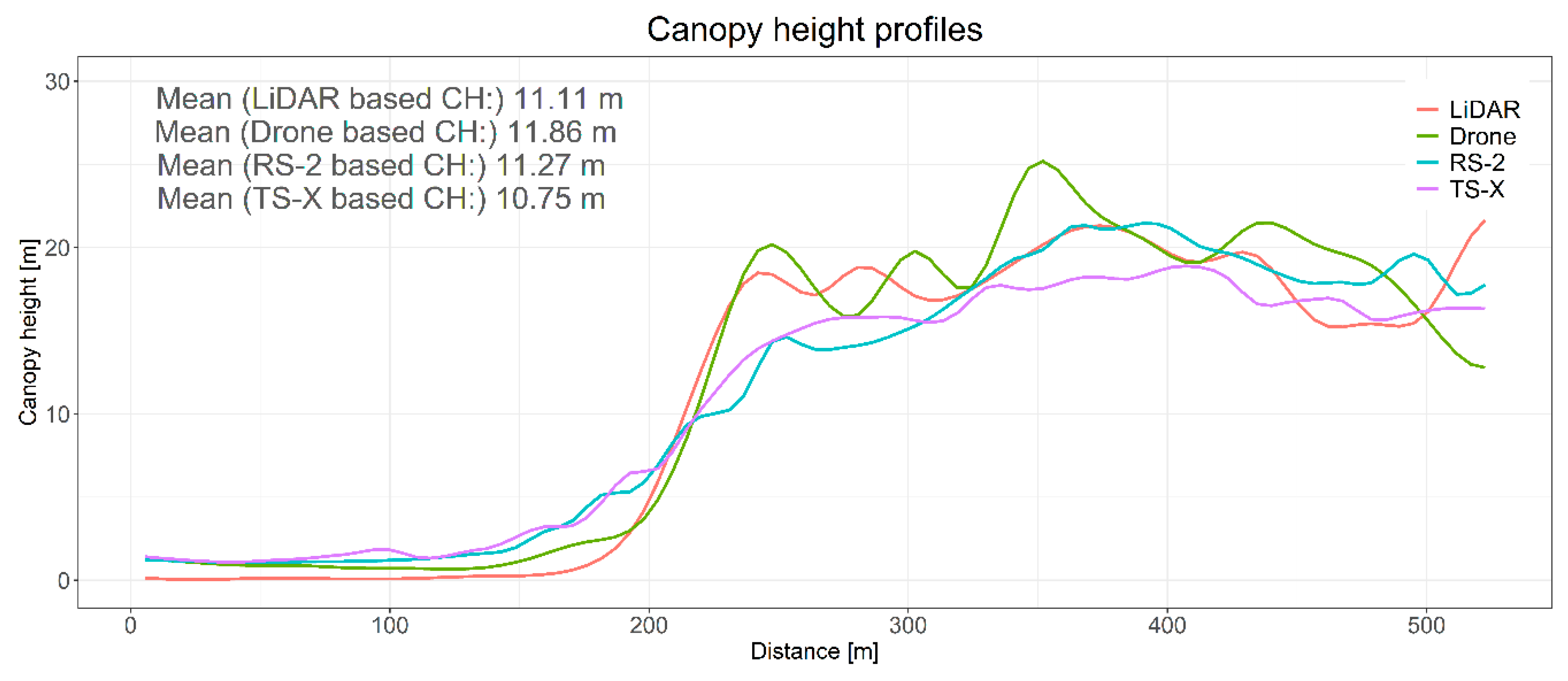
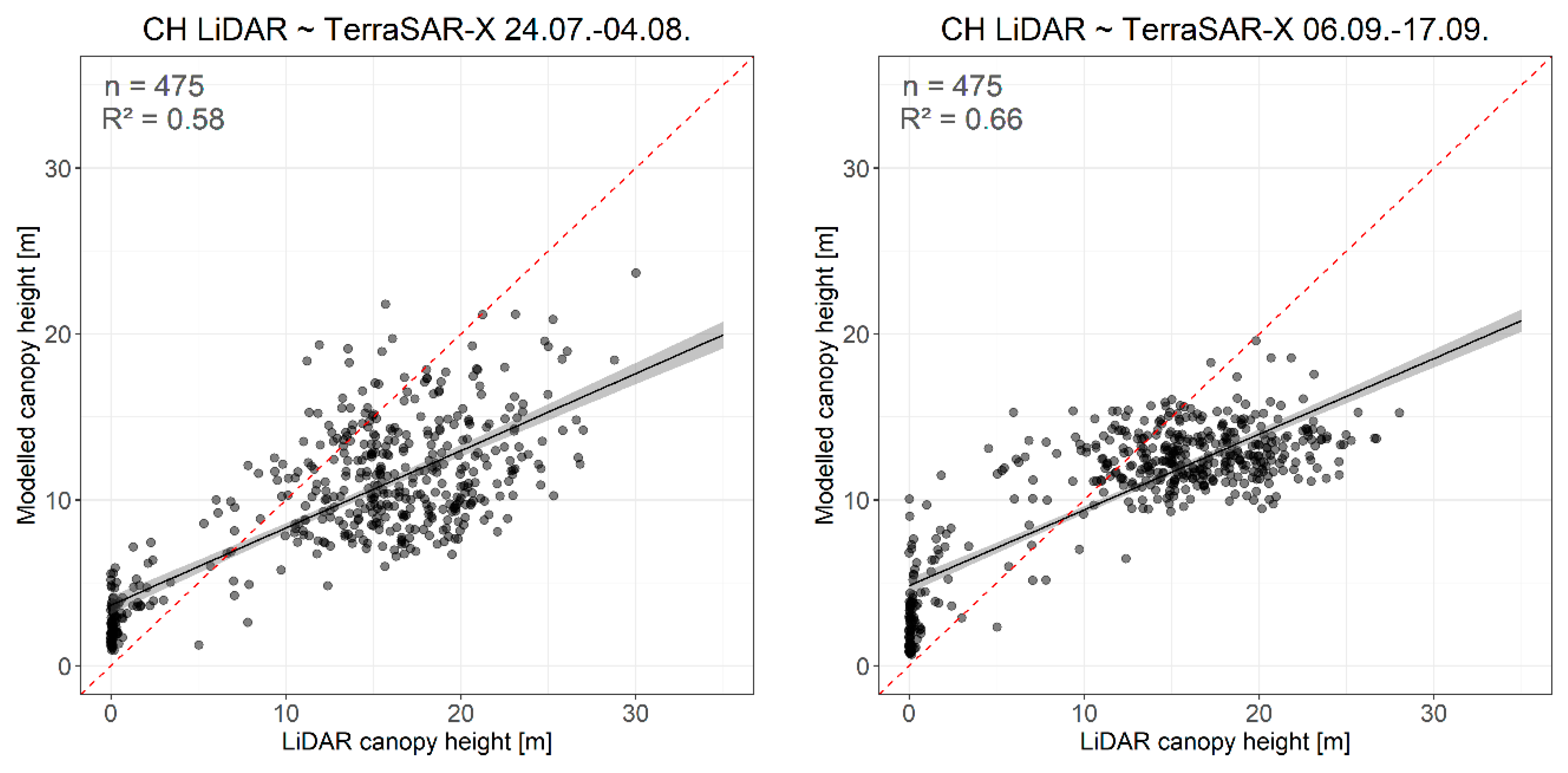
The results of the study show the suitability of Pol-InSAR RS-2 and TS-X data for canopy height estimation in tropical forests of Indonesia using the RMoG model (i). Since all data utilized are multi-pass interferometric data, temporal decorrelation is always present. While the RMoG model demonstrated good potential for compensating temporal decorrelation, this was not addressed in the RVoG model. Regression models were successfully applied for modelling large-scale AGB based on Pol-InSAR canopy height (ii). The validation of all modelled canopy heights and AGB values using the RMoG model was achieved using extensive LiDAR and drone reference data. The results of the different tested images varied since the acquisition parameters and the weather conditions changed during acquisitions. It was shown that canopy height is slightly underestimated by TS-X, whereas RS-2 overestimates the canopy height. Both sensors underestimate AGB, which can be explained with the saturation effect of SAR data regarding biomass. However, a combined canopy height estimation did not provide enhanced performance.
High-resolution information about canopy height and biomass is important for carbon accounting. Since the collection of field data is time-consuming and not practicable in all areas of the world, the use of LiDAR, drone and satellite data are helpful alternatives. Nevertheless, LiDAR and drone data acquisitions are very cost-intensive. The use of earth observation approaches enables a cost-effective way to cover large areas. Moreover, the high data availability and the combination of different sensors enables the reduction of uncertainties in indirect measurement approaches such as canopy height and biomass modelling from SAR data. We showed that the RMoG can help to estimate high-resolution canopy height data and AGB from different sensors and thus allows a support to monitoring and risk managing systems for spacious areas. The resulting outcomes contribute to REDD+ and other carbon related projects. Future missions such as Tandem-L (DLR) and the Earth Explorer Biomass (ESA) help to further improve data availability for biomass estimation.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}