Farmland Extraction from High Spatial Resolution Remote Sensing Images Based on Stratified Scale Pre-Estimation


Abstract
:
1. Introduction
- Unsupervised post-segmentation scale selections. These methods essentially define several indicators to evaluate segmentation results, and select the most accurate ones as the final segmentation parameters. The typical indicators are local variance (LV) and global score (GS). Drǎguţ proposed LV as an indicator [35,36,37]. Woodcock and Strahler first calculated the value of standard deviation in a small convolutional window, and then computed the mean value of these values over the whole image [38]. Accordingly, the obtained value is LV in the image [37]. Johnson and Xie proposed GS to evaluate results, which considered both intra-segment heterogeneity and inter-segment similarity [39]. Georganos et al. presented a local regression trend analysis method to select scale parameters [40]. Unsupervised post-segmentation scale selection methods need no prior information, but they totally ignore the object category’s influence on scale selection;
- Supervised post-segmentation scale selections. These methods fall into three types: classification accuracy-based, spatial overlap-based, and feature-based ways. For the first type, Zhang and Du [41] used classification results at diverse scales to quantitatively evaluate multi-scale segmentation results, and then determined the different categories’ optimal scales using the evaluation results. For the second type, Zhang et al. [42] presented spatial overlapping degrees between segments and object references to evaluate segmentation results, and the scale with the largest overlapping degree was selected as the optimal scale for multi-resolution segmentations. This kind of method can be sub-divided into two steps. First, segments are matched to object references by boundary matching or region overlapping [43]. Then, the discrepancy measures are calculated on an edge-versus-non-edge basis or by prioritizing the edge pixels according to their distance to the reference [44,45]. For the latter one, Zhang and Du employed a random forest to measure feature importance, and the optimal scale with the largest feature importance was selected from multiple scales [41]. Supervised post-segmentation scale selection methods solidly considered influence factors of scale parameters, but they need referenced data. Therefore, they are difficult to use in practical applications [46];
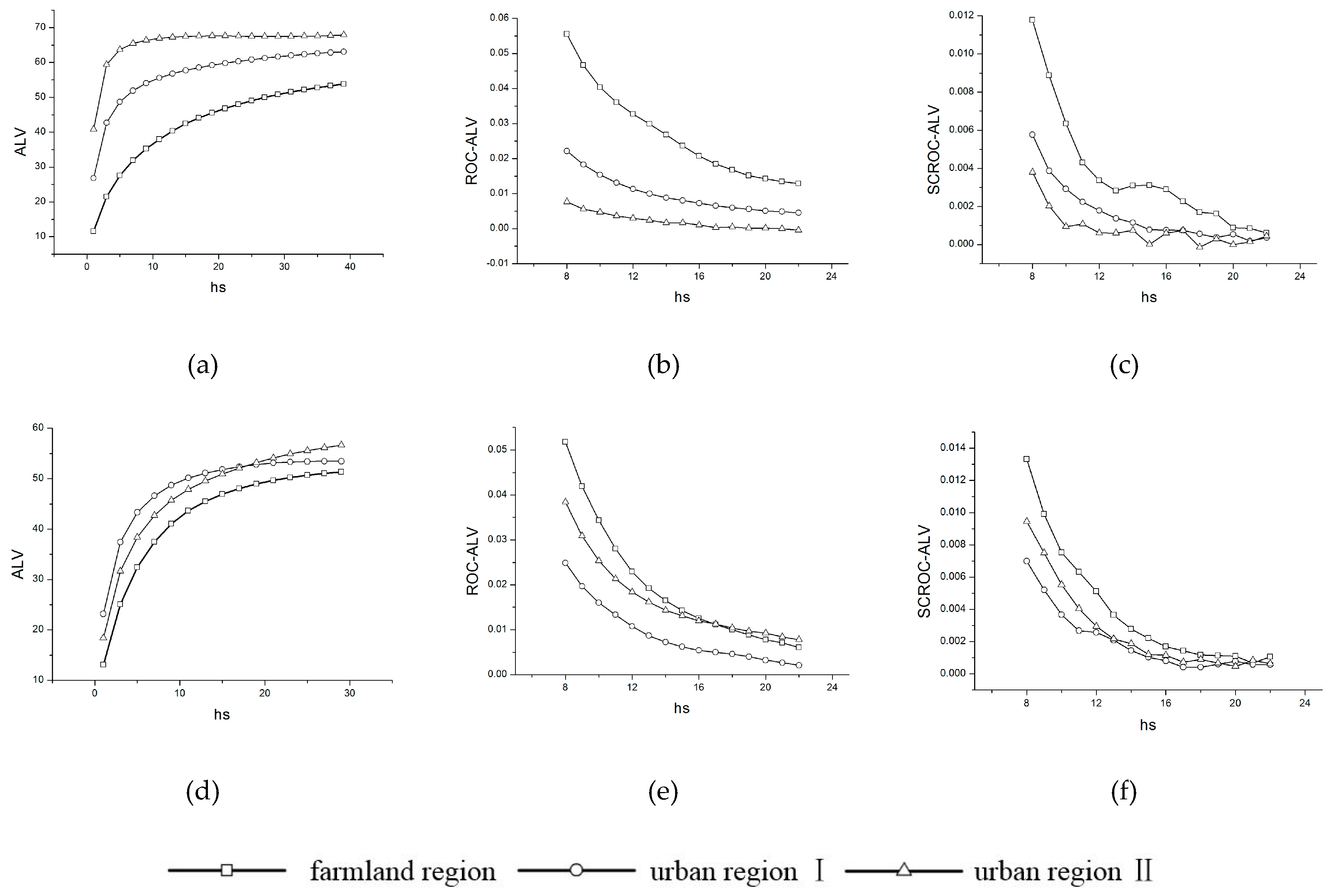
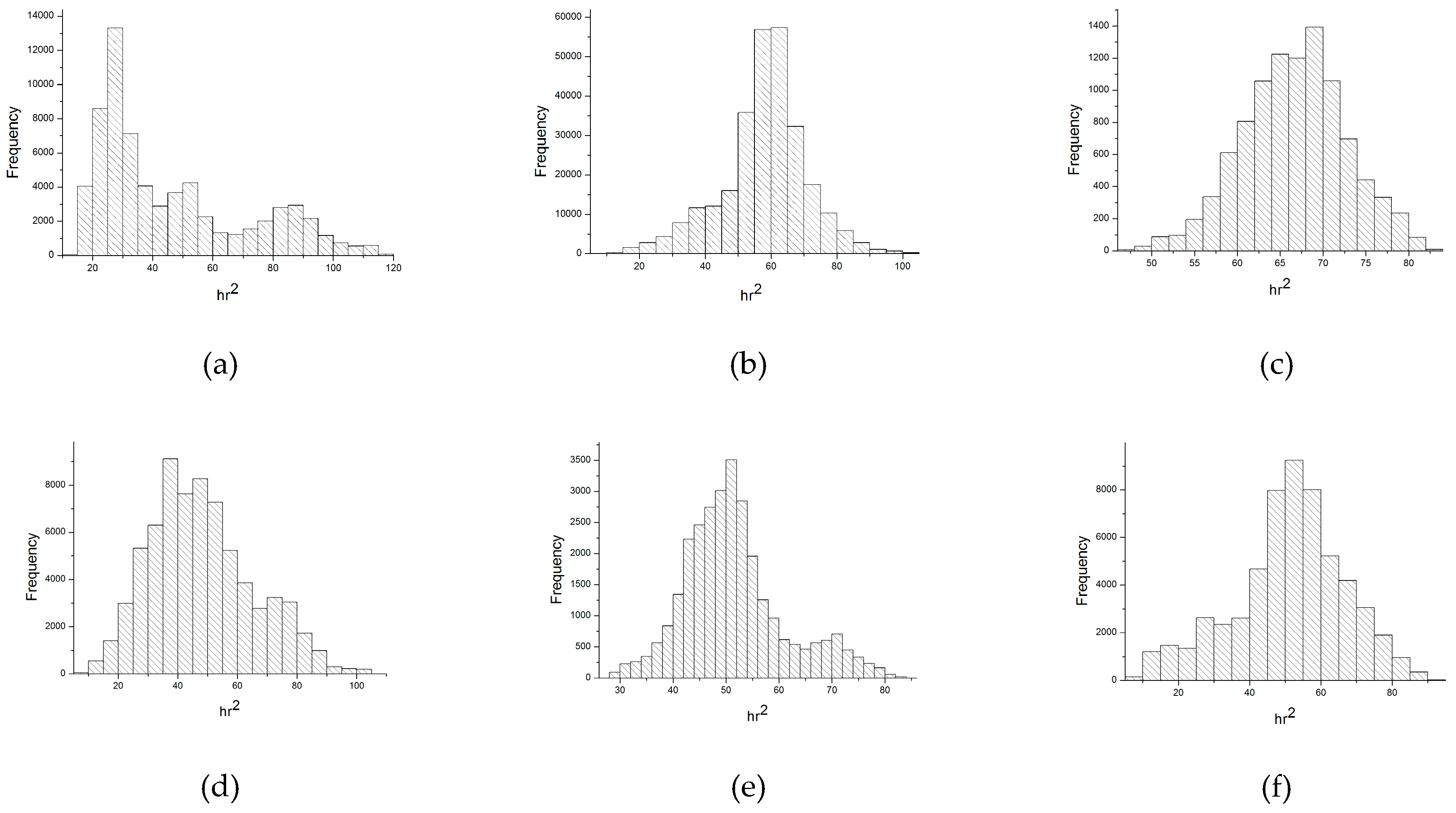
- Pre-segmentation scale estimation based on spatial statistics. Contrasted with the two methods mentioned above, this method only needs spatial statistical features. Ming et al. generalized the commonly used segmentation scale parameters into three general aspects: spatial parameter hs, attribute/spectral parameter hr, and area parameter M [47]. Meanwhile, Ming et al. used the average local variance (ALV) [48] or the semivariogram [49] to estimate the optimal hs, hr, and M. Because this method is completely data-driven, it can reduce the experimental steps and improve the efficiency without the tedious multiple scale segmentation.
2. Materials and Methods
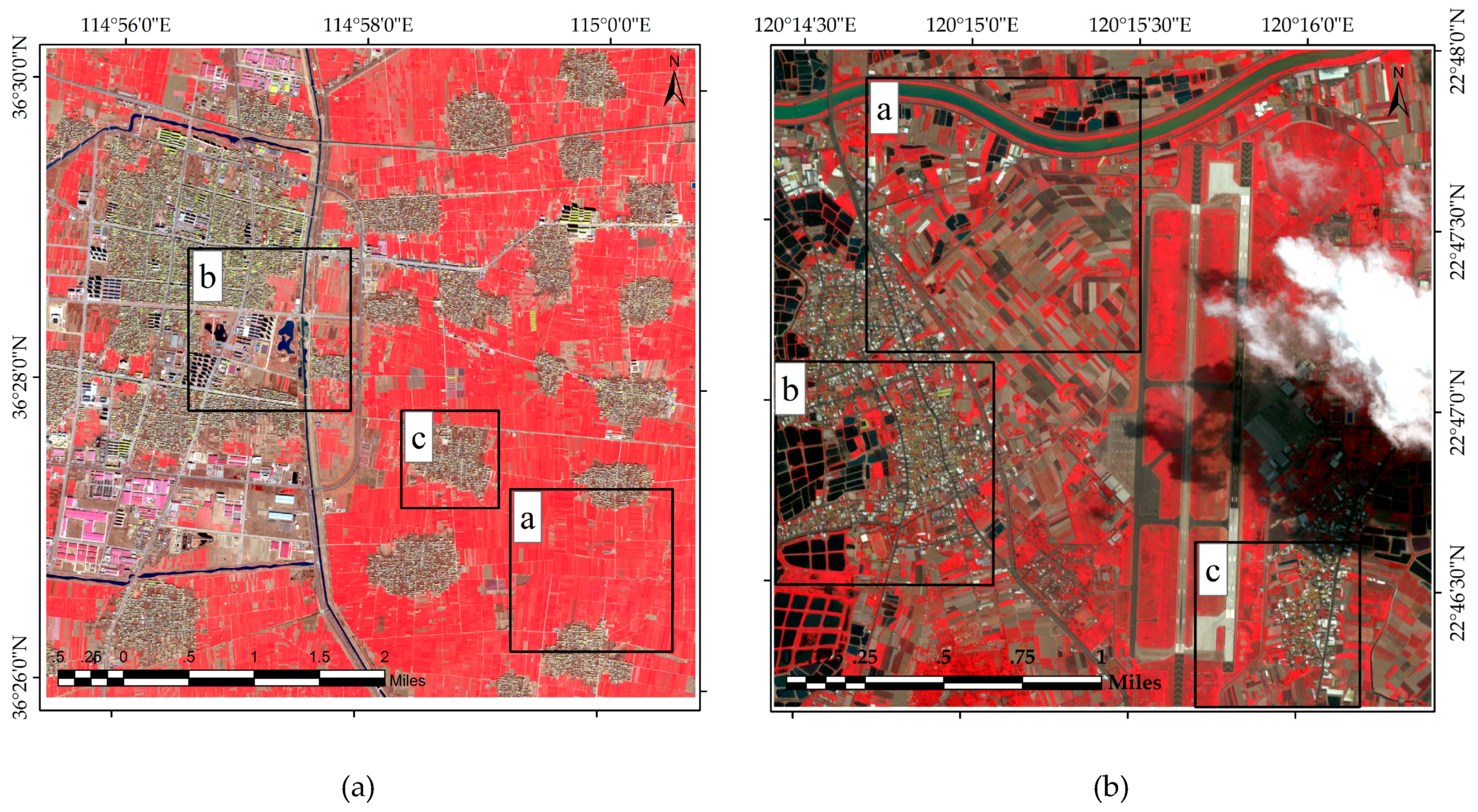
2.1. Study Area and Experimental Data
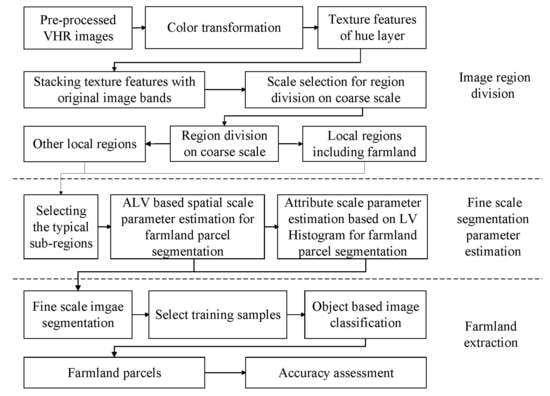
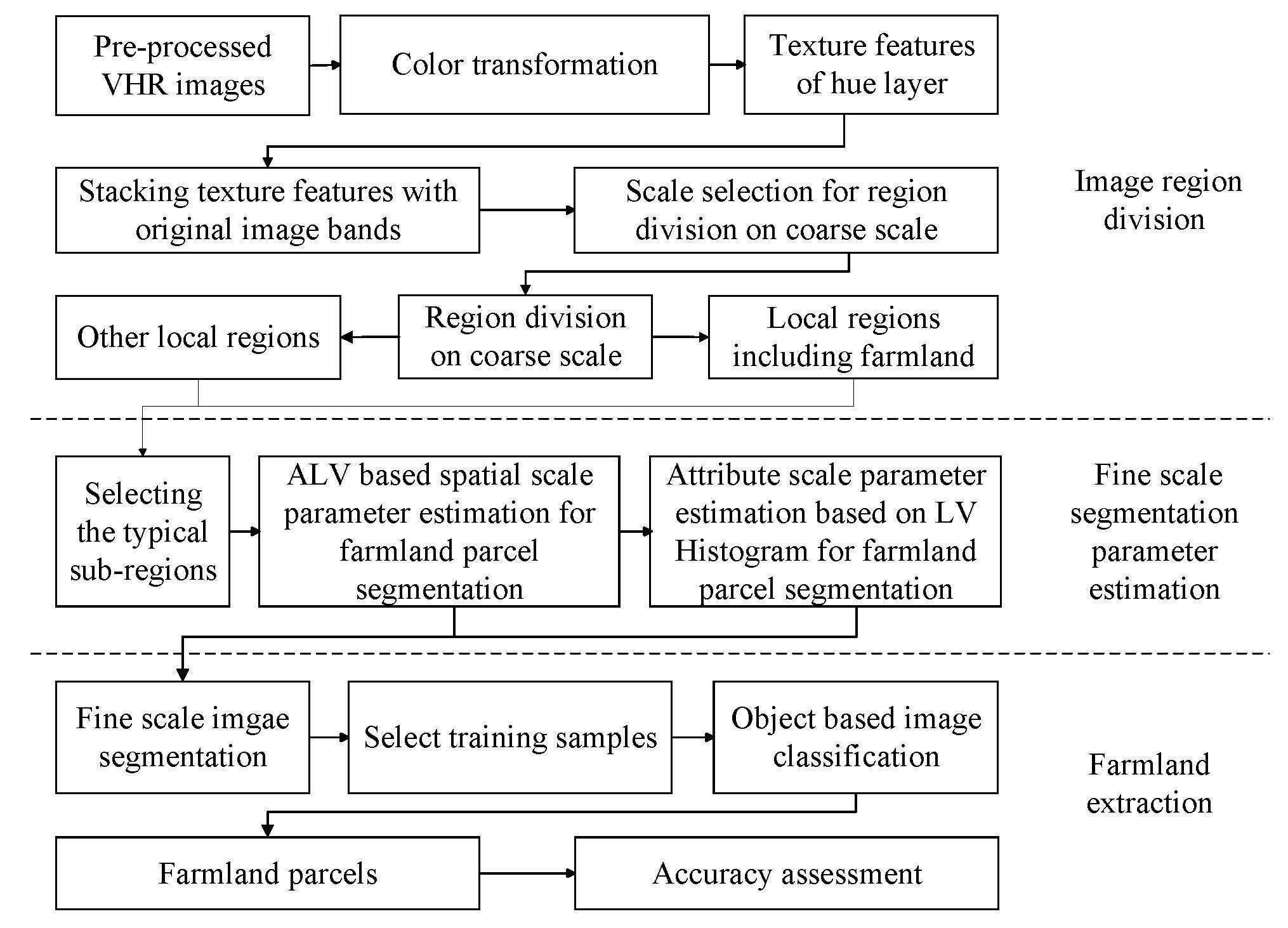
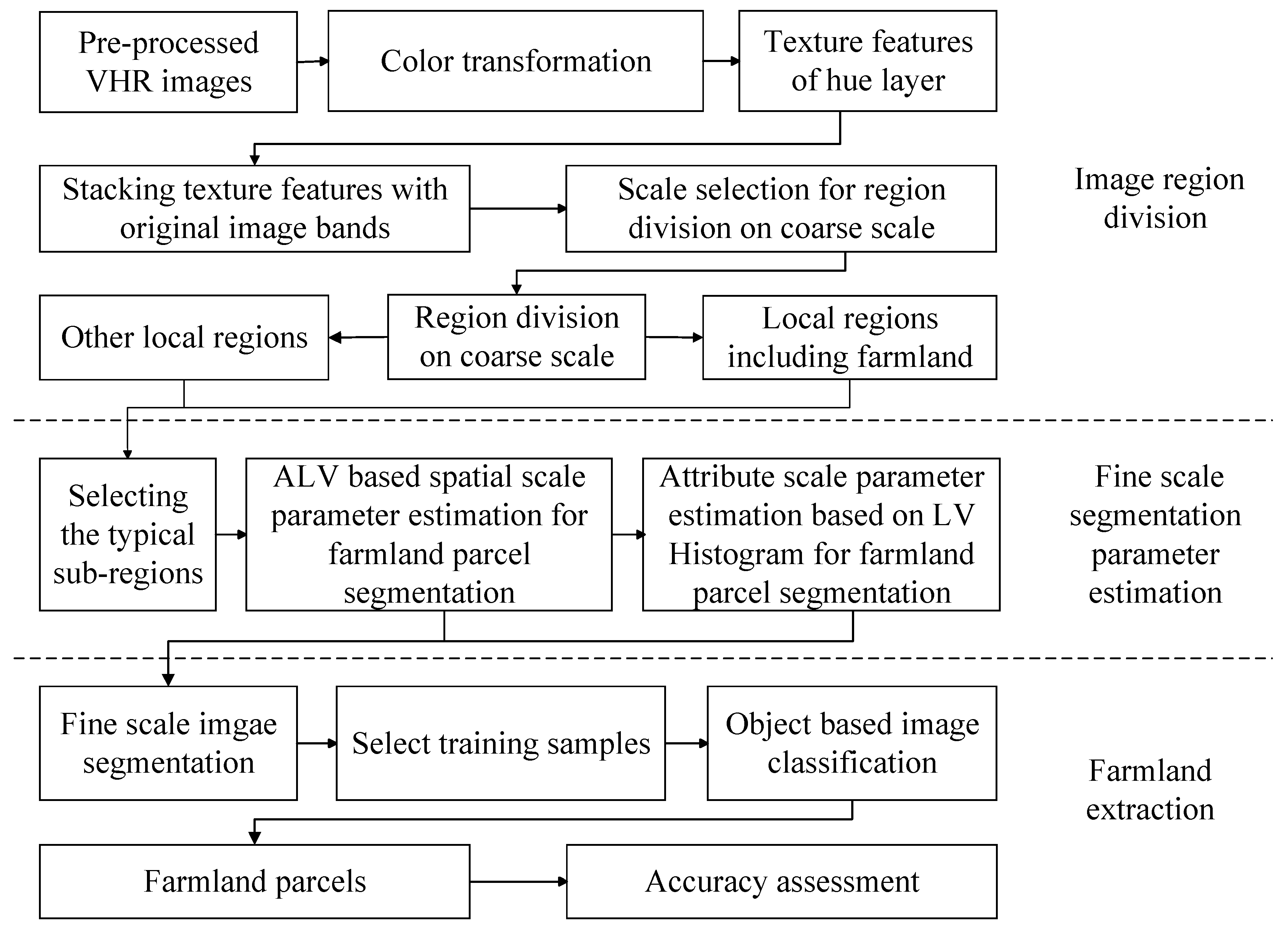
2.2. Methods
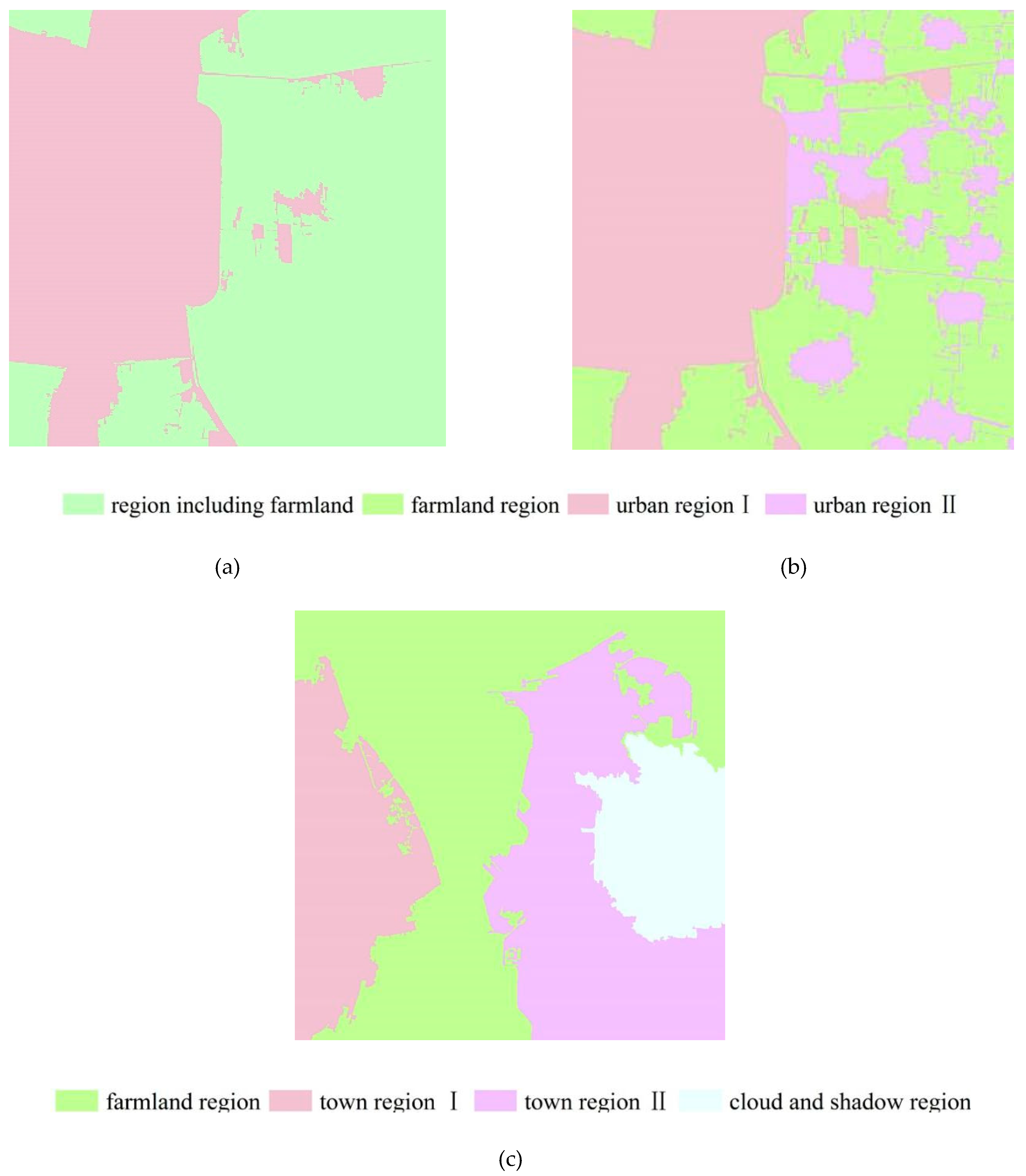
2.2.1. Region Division on Rough Scale
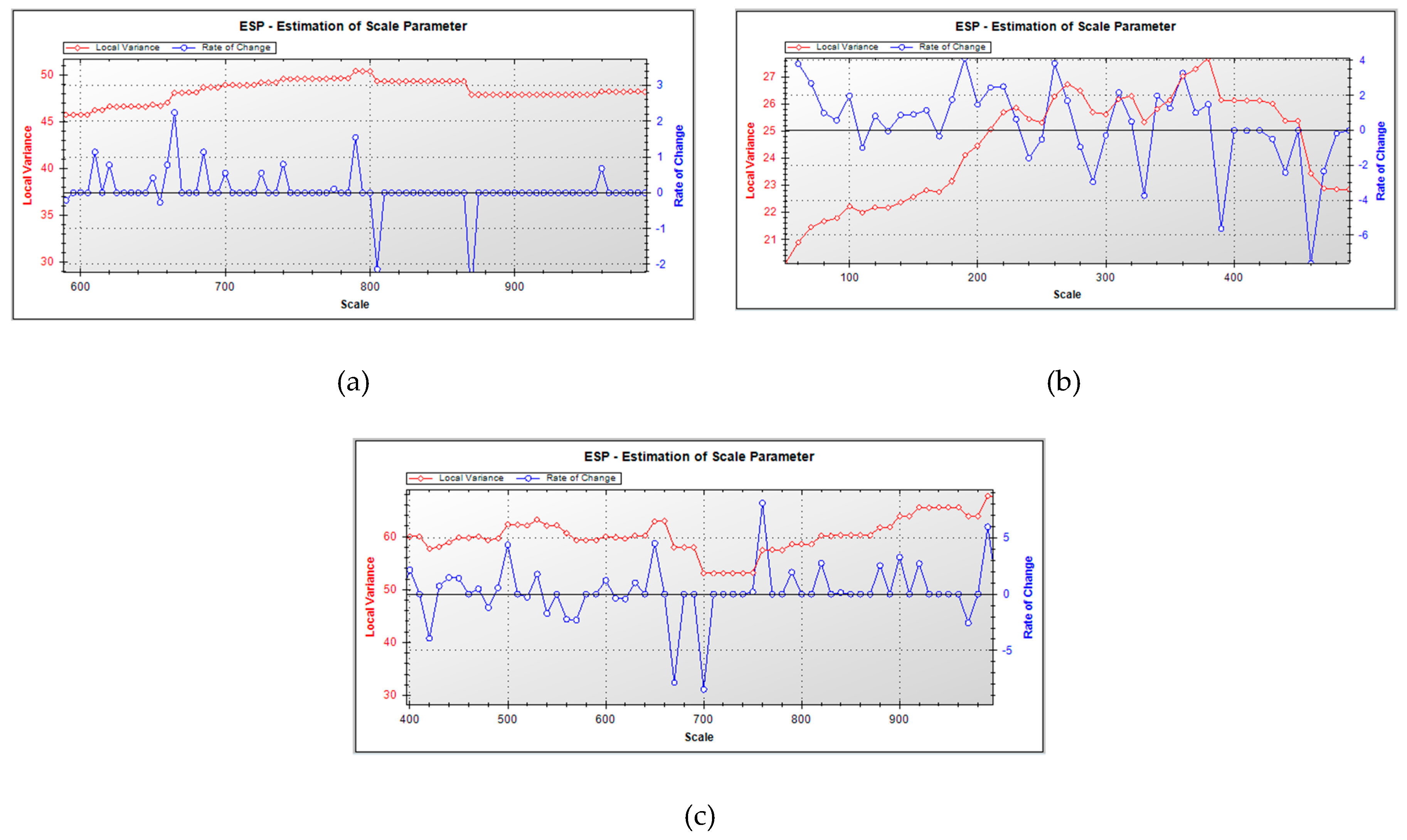
2.2.2. Scale Parameters Pre-Estimation in Local Regions
3. Experiments
3.1. Experiments of Farmland Extraction Based on Stratified Scale Pre-Estimation
3.2. Experimental Results
3.3. Contrast Experiments
4. Discussion
4.1. Effectiveness of Scale Parameters Estimation
4.2. Influence Factors of Farmland Extraction Accuracy
5. Conclusions
- Regional division on a coarse scale can extract the farmland region on a rough scale, which not only improves the efficiency of farmland extraction, but also ensures the method’s universality;
- Pre-segmentation scale estimation based on spatial statistics can avoid under and over segmentation to a certain extent. Meanwhile, the estimation accuracy is guaranteed by the SEM method. Furthermore, it ensures the accuracy of farmland extraction;
- Theoretically, this proposed stratified processing method can be extended to extracting other thematic information which statistically satisfies the hypothesis of the second order stationary. In other words, the proposed stratified farmland extraction method is more suitable for extracting thematic information with a statistically uniform size from the images covered by a complex landscape.
Author Contributions
Funding
Conflicts of Interest
References
- Thenkabail, P.S. Global croplands and their importance for water and food security in the twenty-first century: Towards an ever green revolution that combines a second green revolution with a blue revolution. Remote Sens. 2010, 2, 2305–2312. [Google Scholar] [CrossRef]
- Appeaning Addo, K. Urban and peri-urban agriculture in developing countries studied using remote sensing and in situ methods. Remote Sens. 2010, 2, 497–513. [Google Scholar] [CrossRef]
- Li, Q.; Wang, C.; Zhang, B.; Lu, L. Object-based crop classification with landsat-modis enhanced time-series data. Remote Sens. 2015, 7, 16091–16107. [Google Scholar] [CrossRef]
- Dhaka, S.; Shankar, H.; Roy, P. Irs p6 liss-iv image classification using simple, fuzzy logic and artificial neural network techniques: A comparison study. Int. J. Tech. Res. Sci. (IJTRS) 2016, 1. Available online: https://www.google.com.sg/url?sa=t&rct=j&q=&esrc=s&source=web&cd=2&ved=2ahUKEwiAivGqjeDfAhVFZt4KHUZ_BR0QFjABegQICRAB&url=http%3A%2F%2Fijtrs.com%2Fuploaded_paper%2FIRS%2520P6%2520LISS-IV%2520Image%2520Classification%2520using%2520Simple%2C%2520Fuzzy%2520%2520Logic%2520and%2520%2520Artificial%2520Neural%2520Network%2520Techniques%2520A%2520Comparison%2520Study%25201.pdf&usg=AOvVaw0JzyZUWdbKKeg3e1zIymFY (accessed on 7 January 2019).
- Lu, L.; Yanlin, H.; Di, L.; Hang, D. A new spatial attraction model for improving subpixel land cover classification. Remote Sens. 2017, 9, 360. [Google Scholar] [CrossRef]
- García-Pedrero, A.; Gonzalo-Martín, C.; Lillo-Saavedra, M. A machine learning approach for agricultural parcel delineation through agglomerative segmentation. Int. J. Remote Sens. 2017, 38, 1809–1819. [Google Scholar] [CrossRef]
- Park, S.; Im, J.; Park, S.; Yoo, C.; Han, H.; Rhee, J. Classification and mapping of paddy rice by combining landsat and sar time series data. Remote Sens. 2018, 10, 447. [Google Scholar] [CrossRef]
- Khosravi, I.; Safari, A.; Homayouni, S. Msmd: Maximum separability and minimum dependency feature selection for cropland classification from optical and radar data. Int. J. Remote Sens. 2018, 39, 1–18. [Google Scholar] [CrossRef]
- Barbedo, J.G.A. A Review on the Automatic Segmentation and Classification of Agricultural Areas in Remotely Sensed Images. Available online: https://www.researchgate.net/publication/328073552_A_Review_on_the_Automatic_Segmentation_and_Classification_of_Agricultural_Areas_in_Remotely_Sensed_Images (accessed on 7 January 2019).
- Thenkabail, P.S.; Biradar, C.M.; Noojipady, P.; Dheeravath, V.; Li, Y.; Velpuri, M.; Gumma, M.; Gangalakunta, O.R.P.; Turral, H.; Cai, X.; et al. Global irrigated area map (giam), derived from remote sensing, for the end of the last millennium. Int. J. Remote Sens. 2009, 30, 3679–3733. [Google Scholar] [CrossRef]
- Thenkabail, P.S.; Lyon, J.G.; Turral, H.; Biradar, C.M. Remote Sensing of Global Croplands for Food Securit; CRC Press: Boca Raton, FL, USA, 2009; pp. 336–338. [Google Scholar]
- Thenkabail, P.S.; Knox, J.W.; Ozdogan, M.; Gumma, M.K.; Congalton, R.G.; Wu, Z.; Milesi, C.; Finkral, A.; Marshall, M.; Mariotto, I.; et al. Assessing future risks to agricultural productivity, water resources and food security: How can remote sensing help? Photogramm. Eng. Remote Sens. 2012, 78, 773–782. [Google Scholar]
- Thenkabail, P.S.; Wu, Z. An automated cropland classification algorithm (acca) for tajikistan by combining landsat, modis, and secondary data. Remote Sens. 2012, 4, 2890–2918. [Google Scholar] [CrossRef]
- Chen, J.; Deng, M.; Xiao, P.; Yang, M.; Mei, X. Rough set theory based object-oriented classification of high resolution remotely sensed imagery. Int. J. Remote Sens. 2010, 14, 1139–1155. [Google Scholar]
- Ma, L.; Li, M.; Ma, X.; Cheng, L.; Du, P.; Liu, Y. A review of supervised object-based land-cover image classification. Isprs J. Photogramm. Remote Sens. 2017, 130, 277–293. [Google Scholar] [CrossRef]
- Lu, L.; Tao, Y.; Di, L. Object-based plastic-mulched landcover extraction using integrated sentinel-1 and sentinel-2 data. Remote Sens. 2018, 10, 1820. [Google Scholar] [CrossRef]
- Turker, M.; Ozdarici, A. Field-based crop classification using spot4, spot5, ikonos and quickbird imagery for agricultural areas: A comparison study. Int. J Remote Sens. 2011, 32, 9735–9768. [Google Scholar] [CrossRef]
- Chen, J.; Chen, T.; Mei, X.; Shao, Q.; Deng, M. Hilly farmland extraction from high resolution remote sensing imagery based on optimal scale selection. Trans. Chin. Soc. Agric. Eng. 2014, 30, 99–107. [Google Scholar]
- Helmholz, P.; Rottensteiner, F.; Heipke, C. Semi-automatic verification of cropland and grassland using very high resolution mono-temporal satellite images. ISPRS J. Photogramm. Remote Sens. 2014, 97, 204–218. [Google Scholar] [CrossRef]
- Li, M.; Ma, L.; Blaschke, T.; Cheng, L.; Tiede, D. A systematic comparison of different object-based classification techniques using high spatial resolution imagery in agricultural environments. Int. J. Appl. Earth Obs. Geoinf. 2016, 49, 87–98. [Google Scholar] [CrossRef]
- Karydas, C.; Gewehr, S.; Iatrou, M.; Iatrou, G.; Mourelatos, S. Olive plantation mapping on a sub-tree scale with object-based image analysis of multispectral uav data; operational potential in tree stress monitoring. J. Imaging 2017, 3, 57. [Google Scholar] [CrossRef]
- Peng, D.; Zhang, Y. Object-based change detection from satellite imagery by segmentation optimization and multi-features fusion. Int. J Remote Sens. 2017, 38, 3886–3905. [Google Scholar] [CrossRef]
- Ming, D.; Zhang, X.; Wang, M.; Zhou, W. Cropland extraction based on obia and adaptive scale pre-estimation. Photogramm. Eng. Remote Sens. 2016, 82, 635–644. [Google Scholar] [CrossRef]
- Ming, D.; Qiu, Y.; Zhou, W. Applying spatial statistics into remote sensing pattern recognition: With case study of cropland extraction based on geobia. Acta Geod. Et Cartogr. Sin. 2016, 45, 825–833. [Google Scholar]
- Yi, L.; Zhang, G.; Wu, Z. A scale-synthesis method for high spatial resolution remote sensing image segmentation. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4062–4070. [Google Scholar] [CrossRef]
- Roy, P.S.; Behera, M.D.; Srivastav, S.K. Satellite remote sensing: Sensors, applications and techniques. Proc. Natl. Acad. Sci. India 2017. [Google Scholar] [CrossRef]
- Georganos, S.; Grippa, T.; Lennert, M.; Vanhuysse, S.; Wolff, E. SPUSPO: Spatially Partitioned Unsupervised Segmentation Parameter Optimization for Efficiently Segmenting Large Heterogeneous Areas. In Proceedings of the 2017 Conference on Big Data from Space (BiDS’17), Toulouse, France, 28–30 November 2017. [Google Scholar]
- Georganos, S.; Grippa, T.; Lennert, M.; Vanhuysse, S.; Johnson, B.; Wolff, E. Scale matters: Spatially partitioned unsupervised segmentation parameter optimization for large and heterogeneous satellite images. Remote Sens. 2018, 10, 1440. [Google Scholar] [CrossRef]
- Zhang, X.; Du, S.; Wang, Q. Hierarchical semantic cognition for urban functional zones with vhr satellite images and poi data. Isprs J. Photogramm. Remote Sens. 2017, 132, 170–184. [Google Scholar] [CrossRef]
- Heiden, U.; Heldens, W.; Roessner, S.; Segl, K.; Esch, T.; Mueller, A. Urban structure type characterization using hyperspectral remote sensing and height information. Landsc. Urban. Plan. 2012, 105, 361–375. [Google Scholar] [CrossRef]
- Hu, T.; Yang, J.; Li, X.; Gong, P. Mapping urban land use by using landsat images and open social data. Remote Sens. 2016, 8, 151. [Google Scholar] [CrossRef]
- Kavzoglu, T.; Yildiz Erdemir, M.; Tonbul, H. A region-based multi-scale approach for object-based image analysis. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B7, 2412–2447. [Google Scholar]
- Zhou, W.; Ming, D.; Xu, L.; Bao, H.; Wang, M. Stratified object-oriented image classification based on remote sensing image scene division. J. Spectrosc. 2018, 3918954. [Google Scholar] [CrossRef]
- Grybas, H.; Melendy, L.; Congalton, R.G. A comparison of unsupervised segmentation parameter optimization approaches using moderate- and high-resolution imagery. GISci. Remote Sens. 2017, 54, 515–533. [Google Scholar] [CrossRef]
- Drǎguţ, L.; Csillik, O.; Eisank, C.; Tiede, D. Automated parameterisation for multi-scale image segmentation on multiple layers. ISPRS J. Photogramm. Remote Sens. 2014, 88, 119–127. [Google Scholar] [CrossRef] [Green Version]
- Drǎguţ, L.; Eisank, C.; Strasser, T. Local variance for multi-scale analysis in geomorphometry. Geomorphology 2011, 130, 162–172. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Drǎguţ, L.; Tiede, D.; Levick, S.R. Esp: A tool to estimate scale parameter for multiresolution image segmentation of remotely sensed data. Int. J. Geogr. Inf. Sci. 2010, 24, 859–871. [Google Scholar] [CrossRef]
- Woodcock, C.E.; Strahler, A.H. The factor of scale in remote sensing. Remote Sens. Environ. 1987, 21, 3113–3132. [Google Scholar] [CrossRef]
- Johnson, B.; Xie, Z. Unsupervised image segmentation evaluation and refinement using a multi-scale approach. ISPRS J. Photogramm. Remote Sens. 2011, 66, 4734–4783. [Google Scholar] [CrossRef]
- Georganos, S.; Lennert, M.; Grippa, T.; Vanhuysse, S.; Johnson, B.; Wolff, E. Normalization in unsupervised segmentation parameter optimization: A solution based on local regression trend analysis. Remote Sens. 2018, 10, 222. [Google Scholar] [CrossRef]
- Zhang, X.; Du, S. Learning selfhood scales for urban land cover mapping with very-high-resolution satellite images. Remote Sens. Environ. 2016, 178, 1721–1790. [Google Scholar] [CrossRef]
- Zhang, X.; Xiao, P.; Feng, X.; Feng, L.; Ye, N. Toward evaluating multiscale segmentations of high spatial resolution remote sensing images. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3694–3706. [Google Scholar] [CrossRef]
- Clinton, N.; Holt, A.; Scarborough, J.; Yan, L.; Gong, P. Accuracy assessment measures for object-based image segmentation goodness. Photogramm. Eng. Remote Sens. 2010, 76, 2892–2899. [Google Scholar] [CrossRef]
- Estrada, F.J.; Jepson, A.D. Benchmarking image segmentation algorithms. Int. J. Comput. Vis. 2009, 85, 1671–1681. [Google Scholar] [CrossRef]
- Albrecht, F. Uncertainty in image interpretation as reference for accuracy assessment in object-based image analysis. In Proceedings of the Ninth International Symposium on Spatial Accuracy Assessment in Natural Resources and Environmental Sciences, Leicester, UK, 20–23 July 2010; pp. 13–16. [Google Scholar]
- Chen, Y.; Ming, D.; Zhao, L.; Lv, B.; Zhou, K.; Qing, Y. Review on high spatial resolution remote sensing image segmentation evaluation. Photogramm. Eng. Remote Sens. 2018, 84, 629–646. [Google Scholar] [CrossRef]
- Ming, D.; Zhou, W.; Wang, M. Scale parameter estimation based on the spatial and spectral statistics in high spatial resolution image segmentation. J. Geo-Inf. Sci. 2016, 18, 6226–6231. [Google Scholar]
- Ming, D.; Li, J.; Wang, J.; Zhang, M. Scale parameter selection by spatial statistics for geobia: Using mean-shift based multi-scale segmentation as an example. Isprs J. Photogramm. Remote Sens. 2015, 106, 28–41. [Google Scholar] [CrossRef]
- Ming, D.; Ci, T.; Cai, H.; Li, L.; Qiao, C.; Du, J. Semivariogram-based spatial bandwidth selection for remote sensing image segmentation with mean-shift algorithm. IEEE Geosci. Remote Sens. Lett. 2012, 9, 813–817. [Google Scholar] [CrossRef]
- Tobler, W.R. A computer movie simulating urban growth in the detroit region. Econ. Geogr. 1970, 46, 234–240. [Google Scholar] [CrossRef]
- Wei, C.; Tang, G.; Wang, M.; Yang, X. Processes of Remote Sens. Digital Image; Springer: Berlin, Germany, 2015. [Google Scholar]
- Hall-Beyer, M. The GLCM tutorial. In Proceedings of the National Council on Geographic Information and Analysis Remote Sensing Core Curriculum, 2000; Available online: https://www.researchgate.net/profile/Mryka_Hall-Beyer/publication/315776784_GLCM_Texture_A_Tutorial_v_30_March_2017/links/58e3e0b10f7e9bbe9c94cc90/GLCM-Texture-A-Tutorial-v-30-March-2017.pdf (accessed on 7 January 2019).
- Hall-Beyer, M. Practical guidelines for choosing glcm textures to use in landscape classification tasks over a range of moderate spatial scales. Int. J. Remote Sens. 2017, 38, 13121–13338. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I. Textural features for image classification. IEEE Trans. Syst. ManCybern. 1973, SMC-3, 6106–6121. [Google Scholar] [CrossRef]
- Hong, J. Gray level-gradient cooccurrence matrix texture analysis method. Acta Autom. Sin. 1984, 10, 222–225. [Google Scholar]
- Goodchild, M.; Quattrochi, D.A. Scale in Remote Sens, and GIS; Lewis Publishers: Boca Raton, FL, USA, 1997; pp. 114–120. [Google Scholar]
- Ming, D.; Yang, J.; Li, L.; Song, Z. Modified alv for selecting the optimal spatial resolution and its scale effect on image classification accuracy. Math. Comput. Model. 2011, 54, 1061–1068. [Google Scholar] [CrossRef]
- Ming, D.; Zhou, W.; Xu, L.; Wang, M.; Ma, Y. Coupling relationship among scale parameter, segmentation accuracy, and classification accuracy in geobia. Photogramm. Eng. Remote Sens. 2018, 84, 6816–6893. [Google Scholar] [CrossRef]
- Chen, R.; Zheng, C.; Wang, L.; Qin, Q. A region growing model under the framework of mrf for urban detection. Acta Geod. Et Cartogr. Sin. 2011, 40, 163. [Google Scholar]
- Wang, L.G.; Zheng, C.; Lin, L.Y.; Chen, R.Y.; Mei, T.C. Fast segmentation algorithm of high resolution remote sensing image based on multiscale mean shift. Spectrosc. Spectr. Anal. 2011, 31, 177. [Google Scholar]
- Wang, L.; Liu, G.; Mei, T.; Qin, Q. A segmentation algorithm for high-resolution remote sensing texture based on spectral and texture information weighting. Acta Opt. Sin. 2009, 29, 3010–3017. [Google Scholar] [CrossRef]
- Su, T.; Li, H.; Zhang, S.; Li, Y. Image segmentation using mean shift for extracting croplands from high-resolution remote sensing imagery. Remote Sens. Lett. 2015, 6, 9529–9561. [Google Scholar] [CrossRef]
- Su, T.; Zhang, S.; Li, H. Variable scale mean-shift based method for cropland segmentation from high spatial resolution remote sensing images. Remote Sens. Land Resour. 2017, 6, 952–961. [Google Scholar]
- Comaniciu, D. An algorithm for data-driven bandwidth selection. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 2812–2888. [Google Scholar] [CrossRef]
- Comaniciu, D.; Meer, P. Mean shift: A robust approach toward feature space analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 603–619. [Google Scholar] [CrossRef]
- Comaniciu, D.; Ramesh, V.; Meer, P. The variable bandwidth mean shift and data-driven scale selection. In Proceedings of the Eighth IEEE International Conference on Computer Vision ICCV 2001, Vancouver, BC, Canada, 71–74 July 2001; Volume 431, pp. 438–445. [Google Scholar]
- Belgiu, M.; Csillik, O. Sentinel-2 cropland mapping using pixel-based and object-based time-weighted dynamic time warping analysis. Remote Sens. Environ. 2018, 204, 509–523. [Google Scholar] [CrossRef]
- Jozdani, S.E.; Momeni, M.; Johnson, B.A.; Sattari, M. A regression modelling approach for optimizing segmentation scale parameters to extract buildings of different sizes. Int. J. Remote Sens. 2018, 39, 684–703. [Google Scholar] [CrossRef]
- Baatz, M. Multi resolution segmentation: An optimum approach for high quality multi scale image segmentation. Beutrage Zum Agit-Symp. Salzbg. Heidelb. 2000, 2000, 12–23. [Google Scholar]
- Cánovas-García, F.; Alonso-Sarría, F. A local approach to optimize the scale parameter in multiresolution segmentation for multispectral imagery. Geocarto Int. 2015, 30, 937–961. [Google Scholar] [CrossRef]
- Ma, Y.; Ming, D.; Yang, H. Scale estimation of object-oriented image analysis based on spectral-spatial statistics. J. Remote Sens. 2017. [CrossRef]
- Espindola, G.M.; Camara, G.; Reis, I.A.; Bins, L.S.; Monteiro, A.M. Parameter selection for region-growing image segmentation algorithms using spatial autocorrelation. Int. J. Remote Sens. 2006, 27, 3035–3040. [Google Scholar] [CrossRef]
- Noh, H.; Hong, S.; Han, B. Learning deconvolution network for semantic segmentation. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Araucano Park, Las Condes, Chile, 11–18 December 2015; pp. 1520–1528. [Google Scholar]
- Penatti, O.A.B.; Nogueira, K.; Dos Santos, J.A. Do deep features generalize from everyday objects to remote sensing and aerial scenes domains? In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, Boston, MA, USA, 8–10 June 2015; pp. 44–51. [Google Scholar]
- Ma, L.; Fu, T.; Li, M. Active learning for object-based image classification using predefined training objects. Int. J. Remote Sens. 2018, 39, 27462–27765. [Google Scholar] [CrossRef]
- Lv, X.; Ming, D.; Chen, Y.; Wang, M. Very high resolution remote sensing image classification with seeds-cnn and scale effect analysis for superpixel cnn classification. Int. J. Remote Sens. 2018, 1–26. [Google Scholar] [CrossRef]
- Lv, X.; Ming, D.; Lu, T.; Zhou, K.; Wang, M.; Bao, H. A new method for region-based majority voting cnns for very high resolution image classification. Remote Sens. 2018, 10, 1946. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region | GF-2 Image Experiment | Quickbird Image Experiment | |||
|---|---|---|---|---|---|
| Estimated hs | Estimated hr | Estimated hs | Estimated hr | Estimated SP | |
| farmland region | 20 | 5 | 17 | 6 | 36 |
| urban region I | 15 | 7 | 14 | 7 | 49 |
| urban region II | 10 | 8 | 15 | 7 | 49 |
| Class | GF-2 Image Experiment | Quickbird Image Experiment | ||
|---|---|---|---|---|
| Training Sample Amounts | Testing Sample Amounts | Training Sample Amounts | Testing Sample Amounts | |
| Low | 27 | 54 | 42 | 79 |
| High | 23 | 311 | 18 | 29 |
| Con | 25 | 375 | 50 | 103 |
| Bare | 30 | 97 | ||
| Water | 10 | 20 | ||
| Veg | 56 | 101 | ||
| Total | 105 | 837 | 176 | 332 |
| Image | GF-2 Image Experiment | Quickbird Image Experiment | ||
|---|---|---|---|---|
| OA | FEA | OA | FEA | |
| farmland region | 0.8113 | 0.9391 | 0.6977 | 0.8633 |
| urban region I | 0.6603 | 0.8182 | 0.8364 | 0.2069 |
| urban region II | 0.6344 | 0.6667 | 0.8361 | 0.4756 |
| merged image | 0.7238 | 0.9154 | 0.7693 | 0.7326 |
| Image | OA | FEA | ||
|---|---|---|---|---|
| Stratified Method | Original Image Without Stratified Processing | Stratified Method | Original Image Without Stratified Processing | |
| GF-2 | 0.7238 | 0.6984 | 0.9154 | 0.9075 |
| Quickbird | 0.7693 | 0.7187 | 0.7326 | 0.6473 |
| Water | Con | Veg | High | Low | Sum | |
|---|---|---|---|---|---|---|
| Water | 26 | 2 | 0 | 0 | 0 | 28 |
| Con | 0 | 100 | 0 | 0 | 0 | 100 |
| Veg | 0 | 10 | 47 | 0 | 0 | 57 |
| High | 0 | 0 | 0 | 0 | 0 | 0 |
| Low | 0 | 23 | 0 | 0 | 6 | 29 |
| sum | 26 | 135 | 47 | 0 | 6 | 214 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, L.; Ming, D.; Zhou, W.; Bao, H.; Chen, Y.; Ling, X. Farmland Extraction from High Spatial Resolution Remote Sensing Images Based on Stratified Scale Pre-Estimation. Remote Sens. 2019, 11, 108. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11020108
Xu L, Ming D, Zhou W, Bao H, Chen Y, Ling X. Farmland Extraction from High Spatial Resolution Remote Sensing Images Based on Stratified Scale Pre-Estimation. Remote Sensing. 2019; 11(2):108. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11020108
Chicago/Turabian StyleXu, Lu, Dongping Ming, Wen Zhou, Hanqing Bao, Yangyang Chen, and Xiao Ling. 2019. "Farmland Extraction from High Spatial Resolution Remote Sensing Images Based on Stratified Scale Pre-Estimation" Remote Sensing 11, no. 2: 108. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11020108