Walker: Continuous and Precise Navigation by Fusing GNSS and MEMS in Smartphone Chipsets for Pedestrians


Abstract
:
1. Introduction
2. Smartphone Pedestrian Navigation Application: Walker
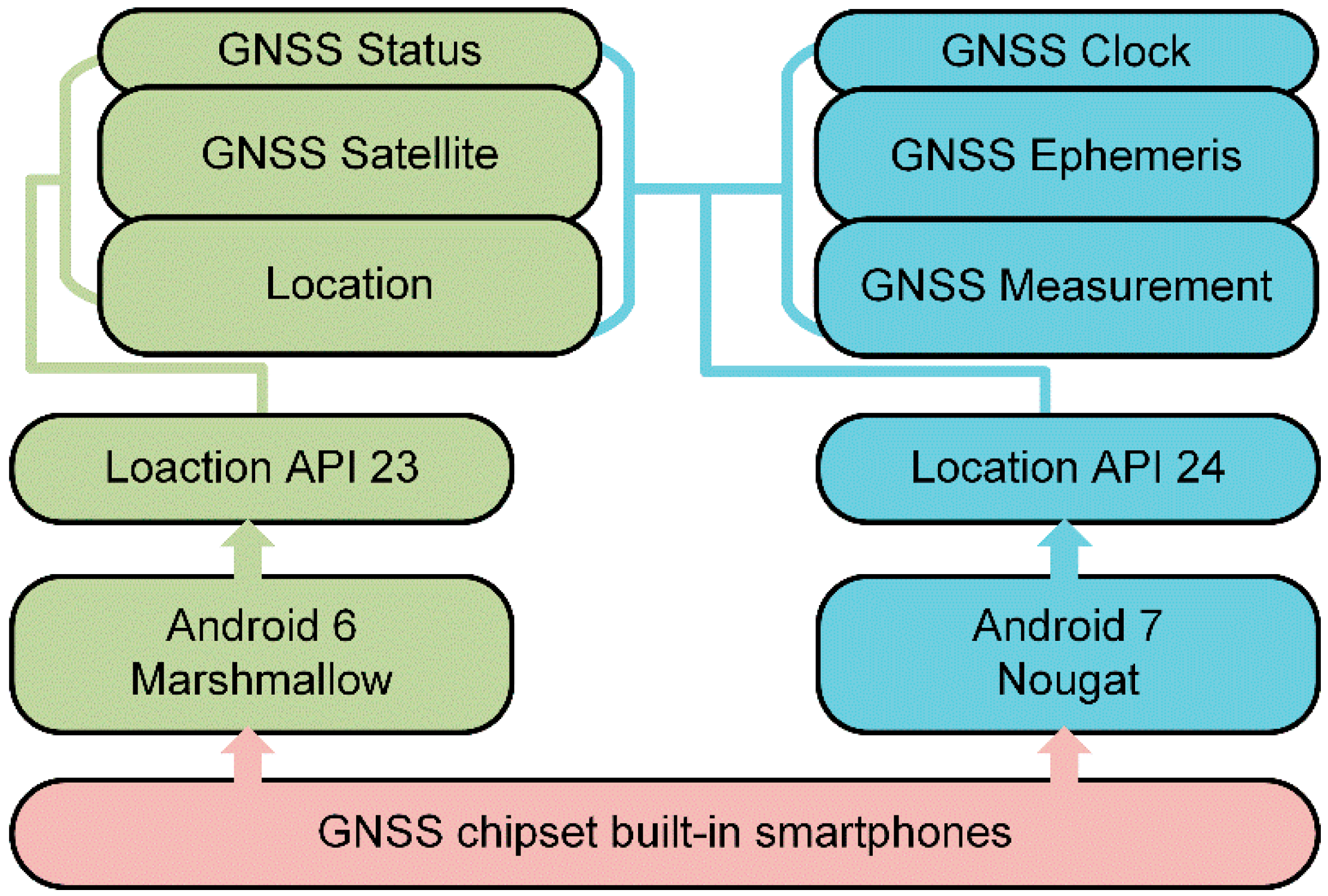
2.1. Android GNSS Observations Generation
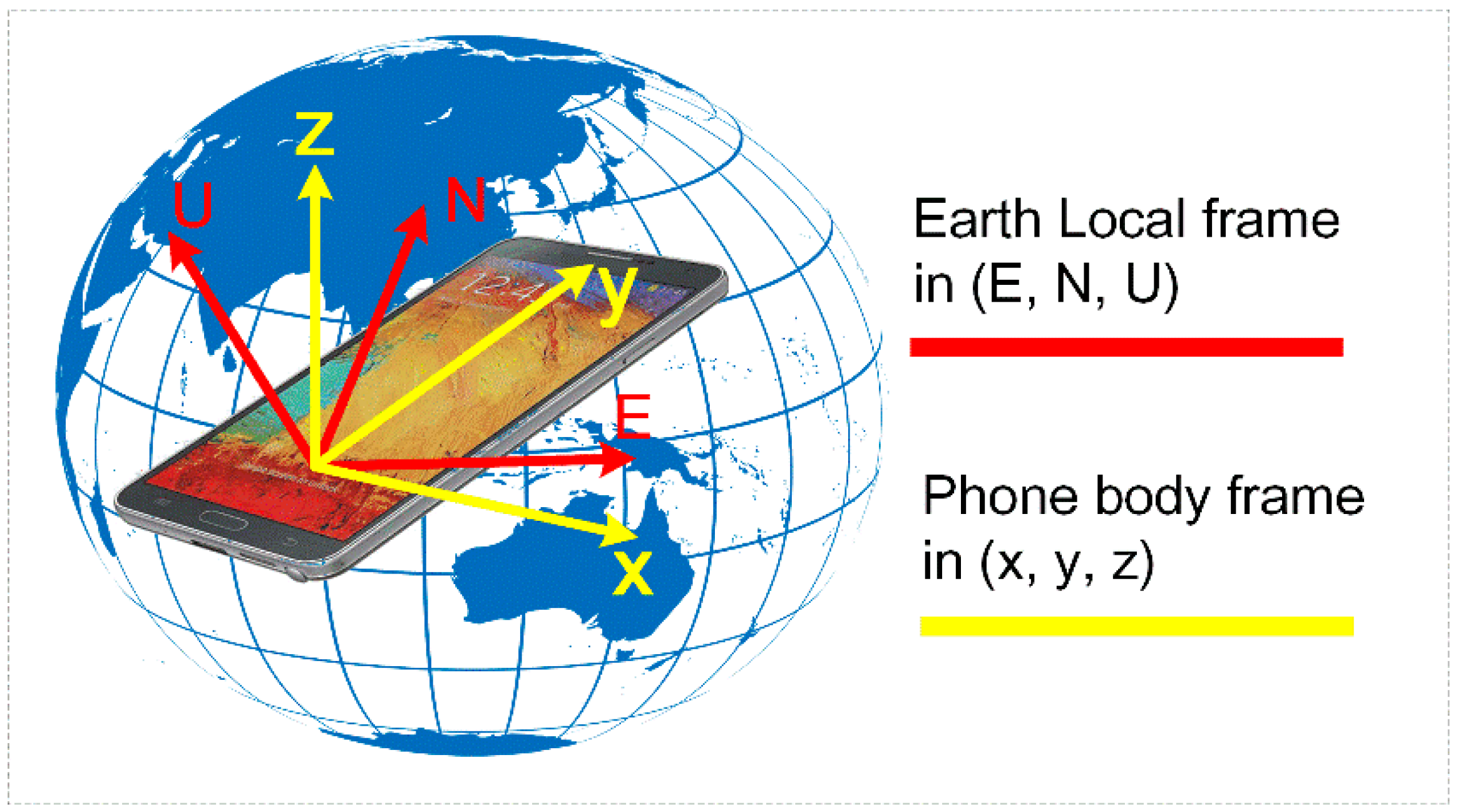
2.2. MEMS Built-in Smartphone
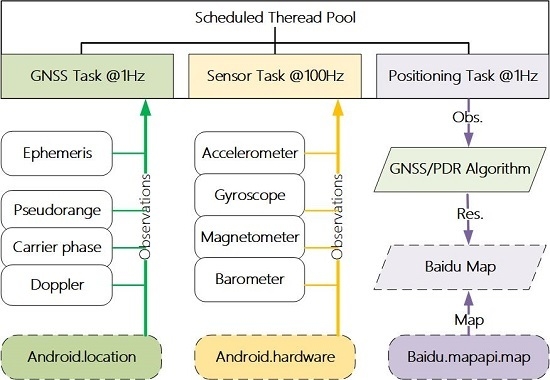
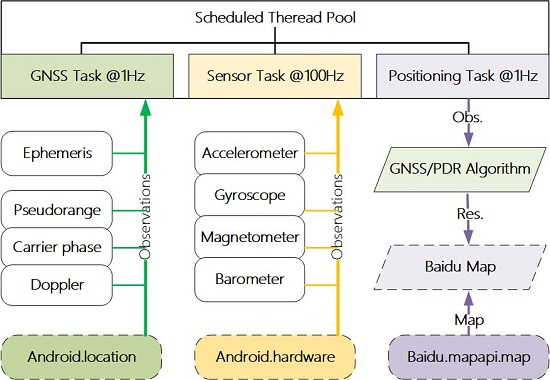
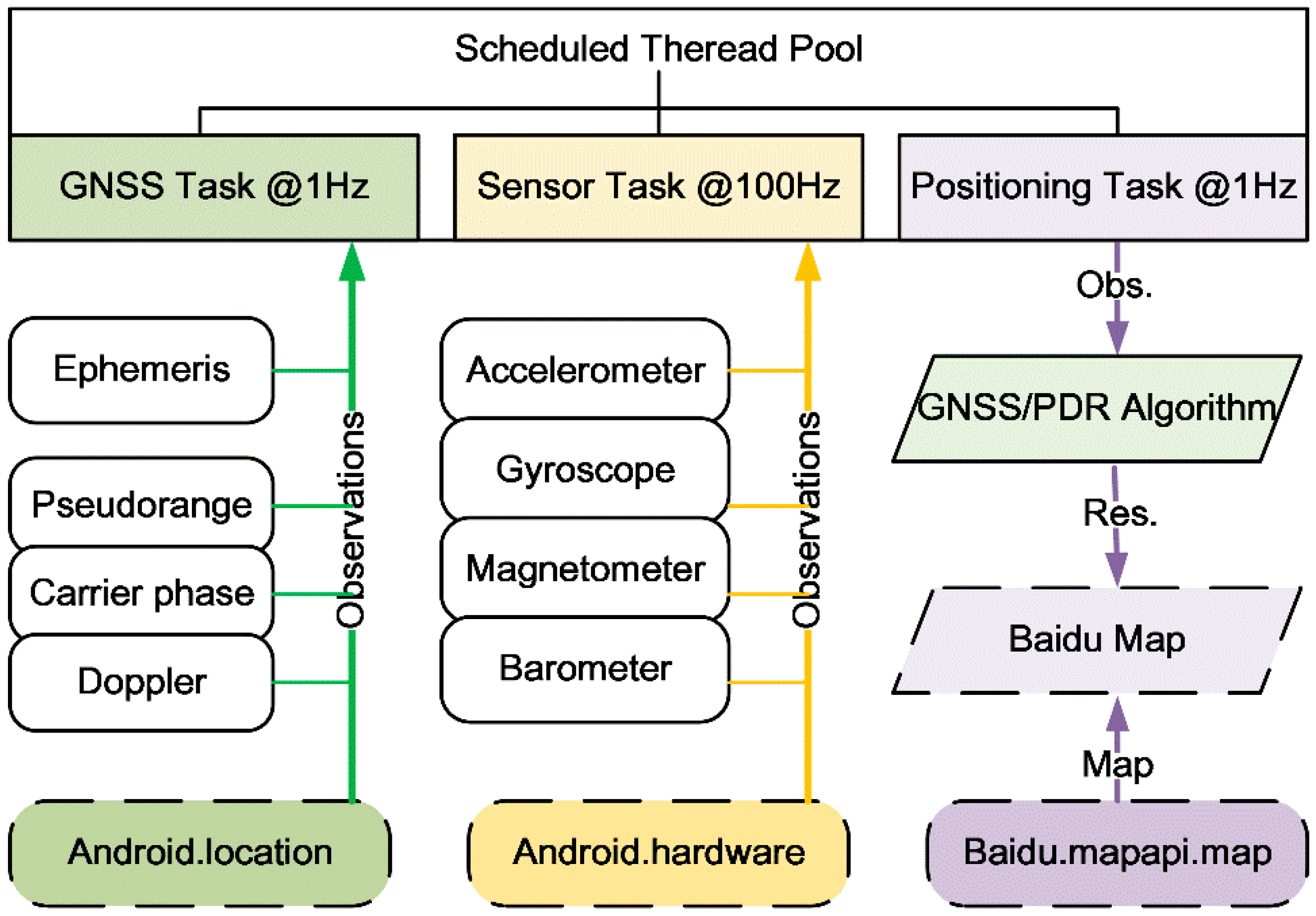
2.3. Design of Walker Application
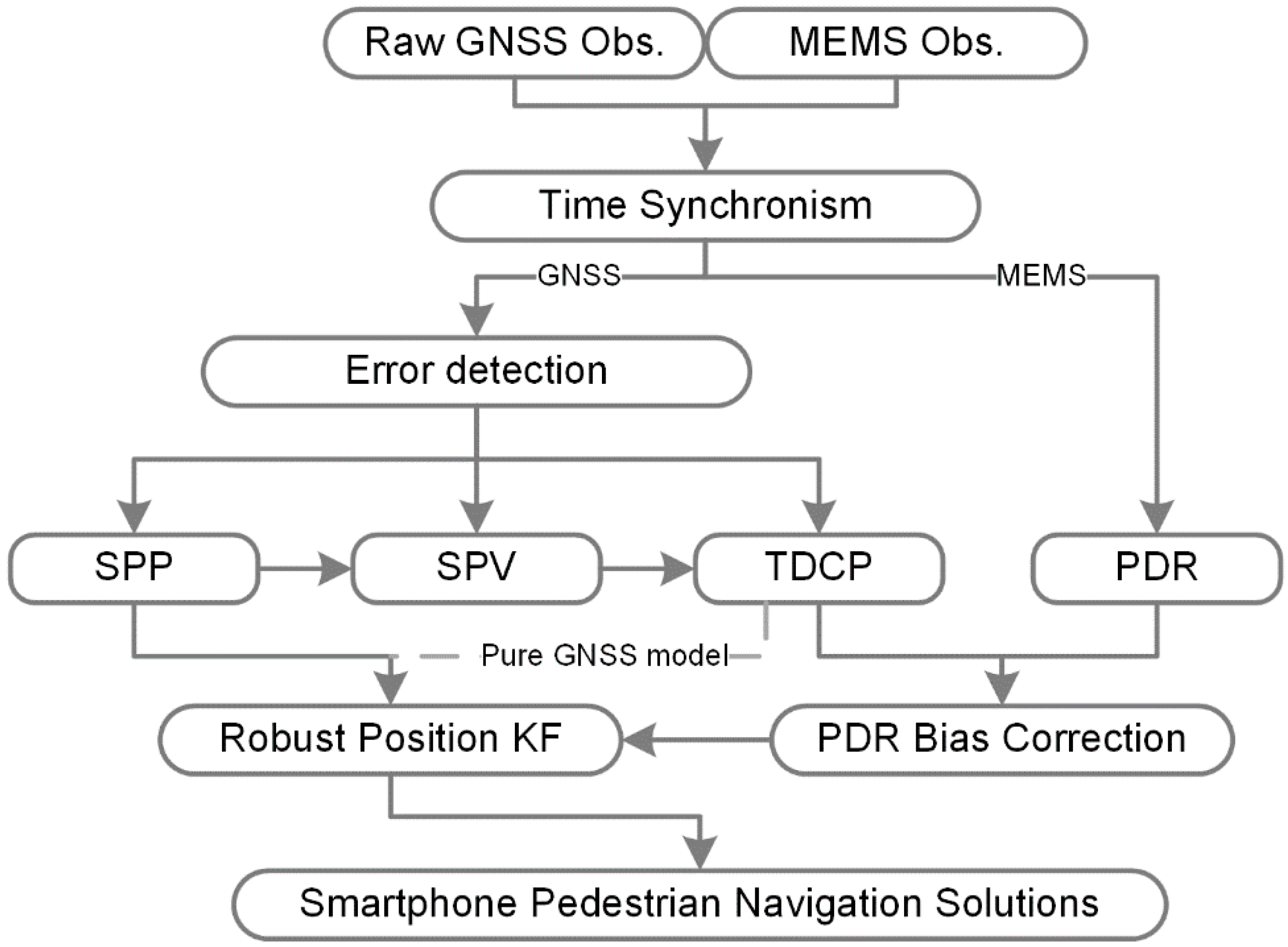
3. Fusion Method of GNSS and MEMS in Smartphones
3.1. GNSS Position and Velocity Estimation
3.2. Fusion Filter Design with Improved 3-D PDR
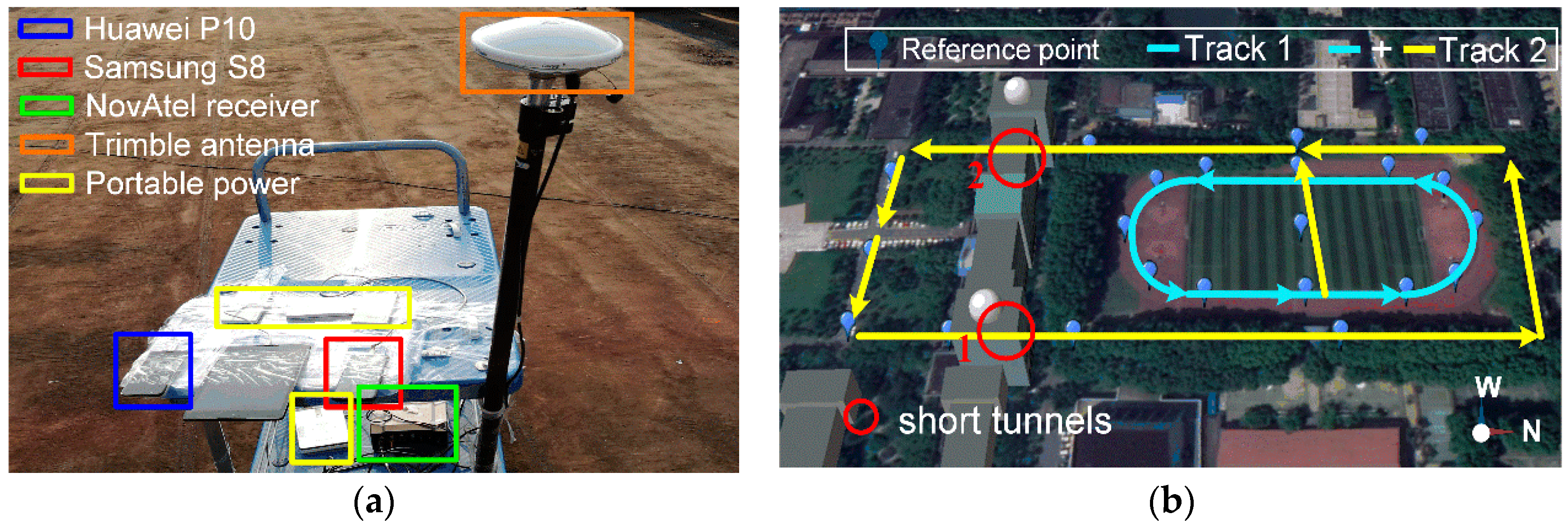
4. Field Test Results and Discussions
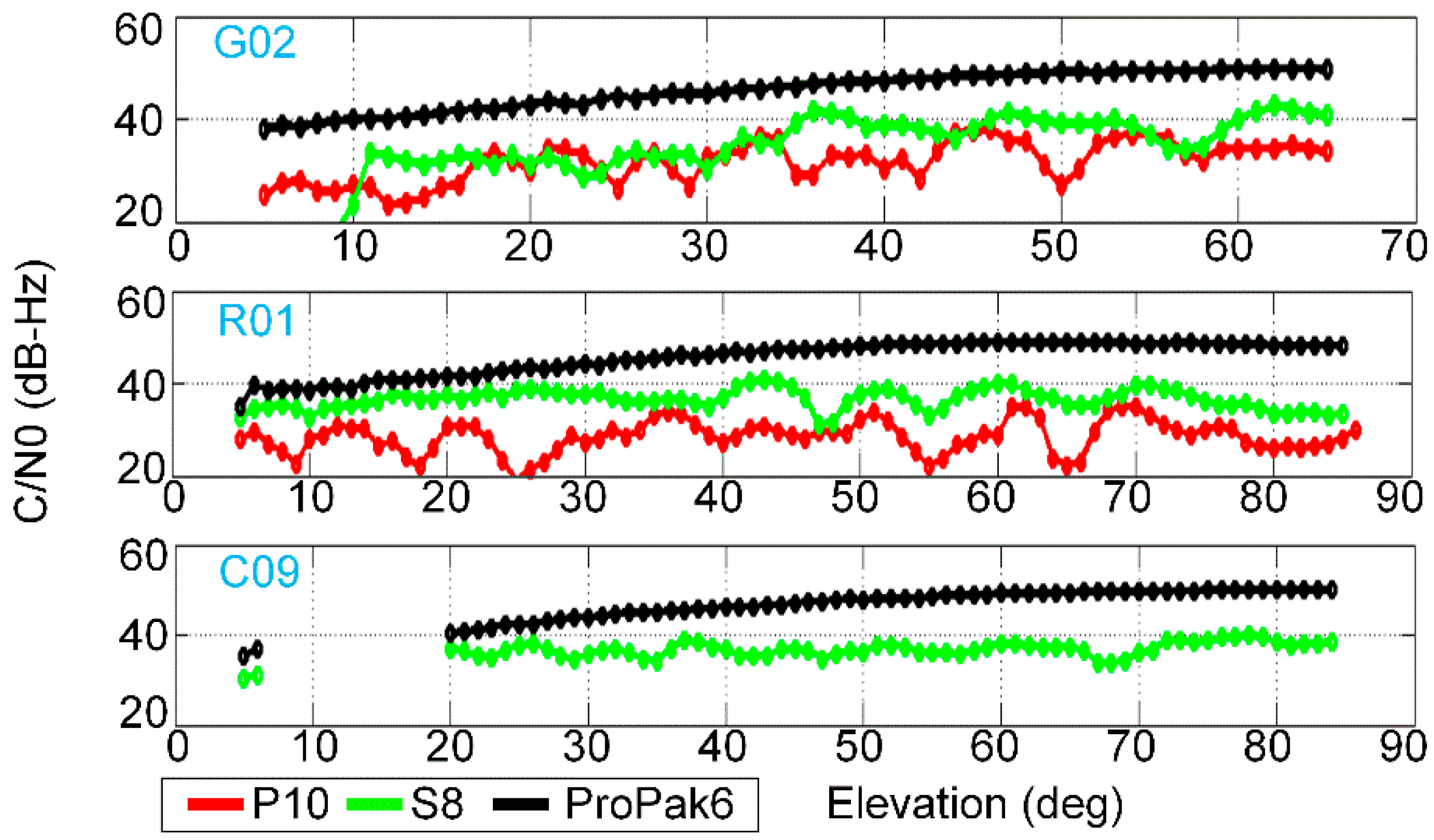
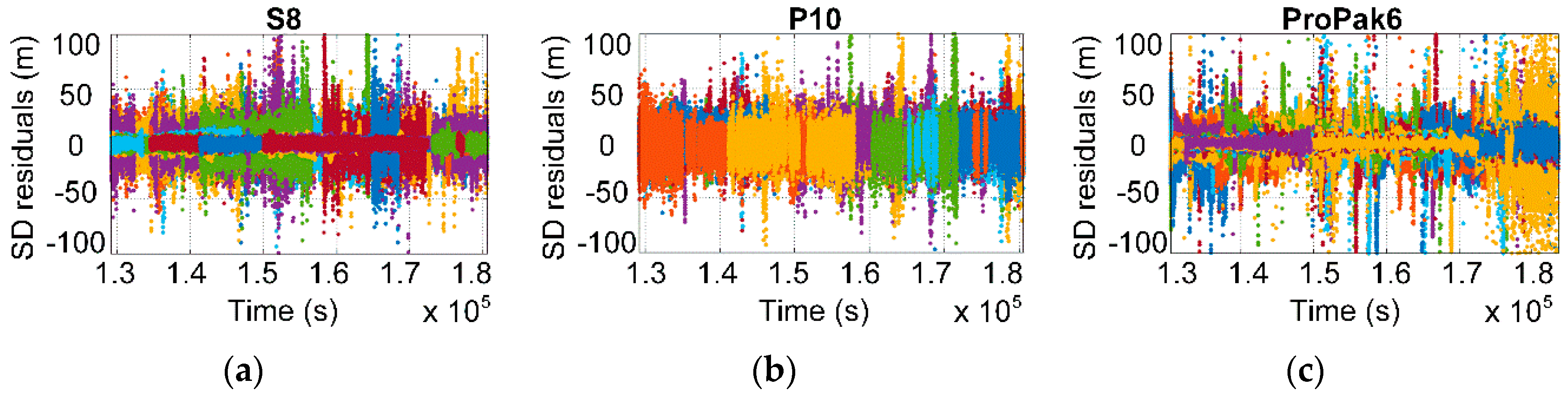
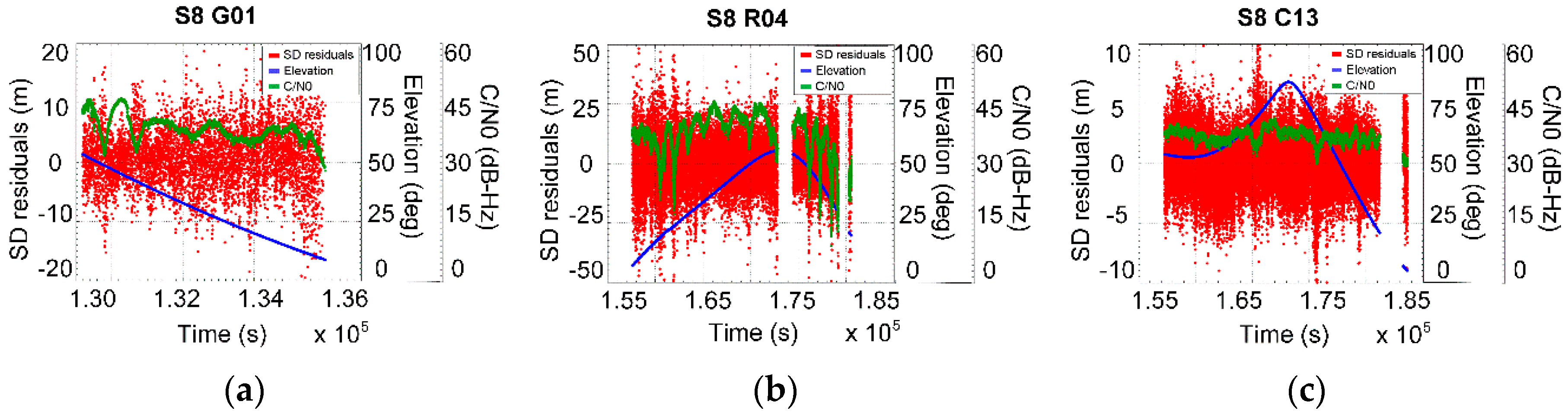
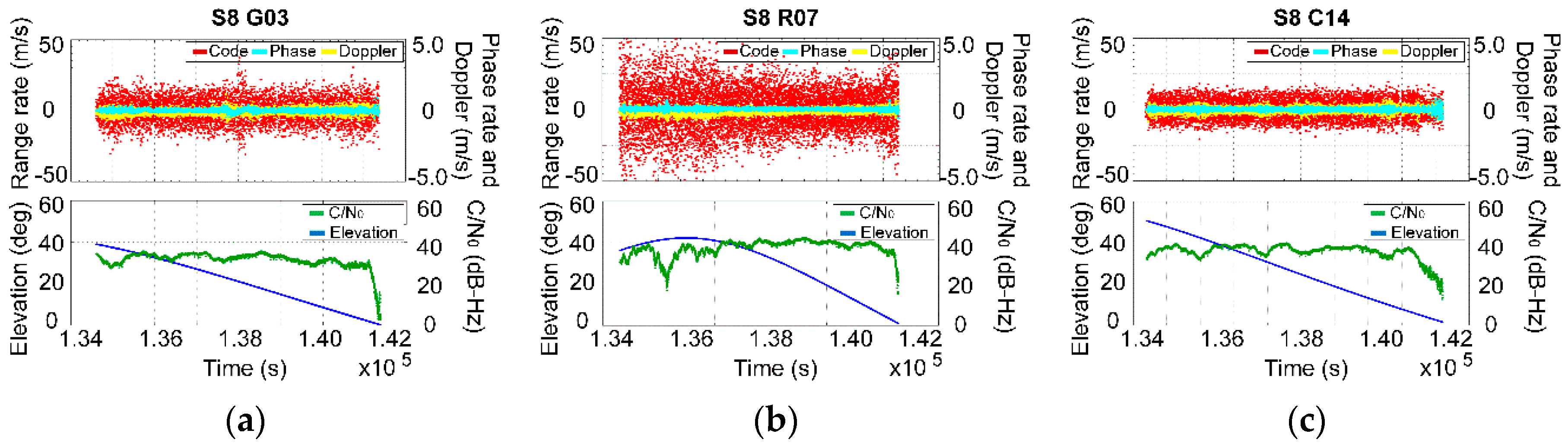
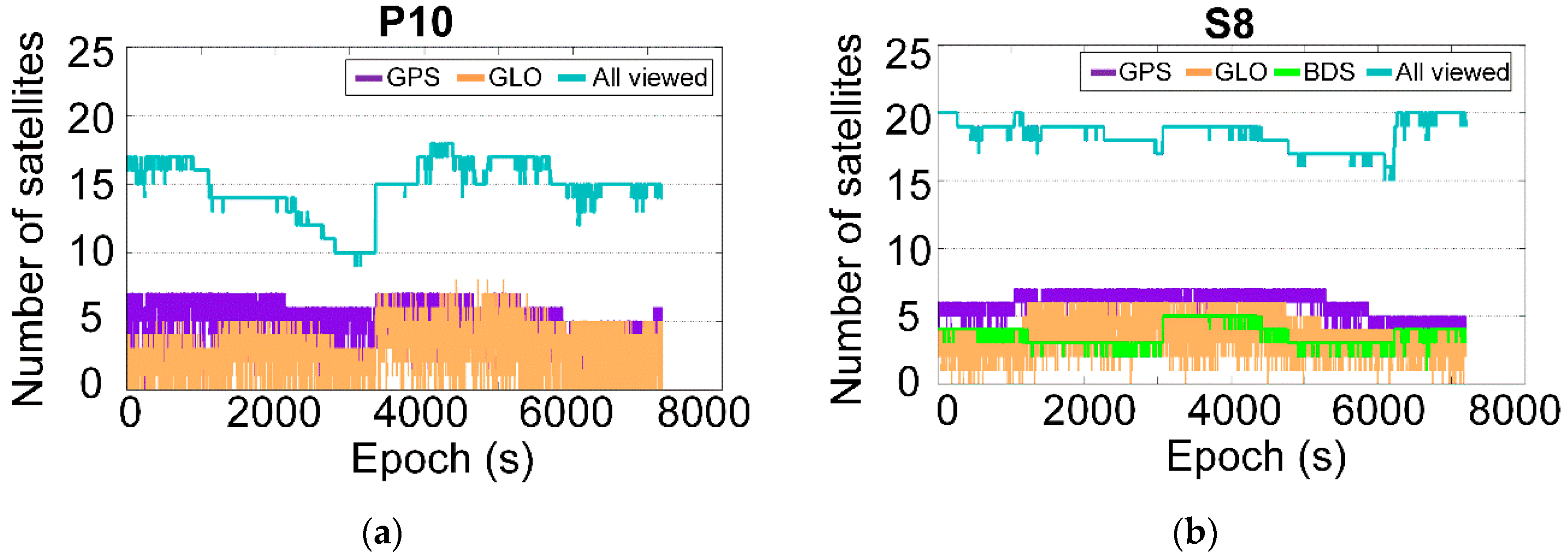
4.1. Characteristics of Smartphone GNSS Observations
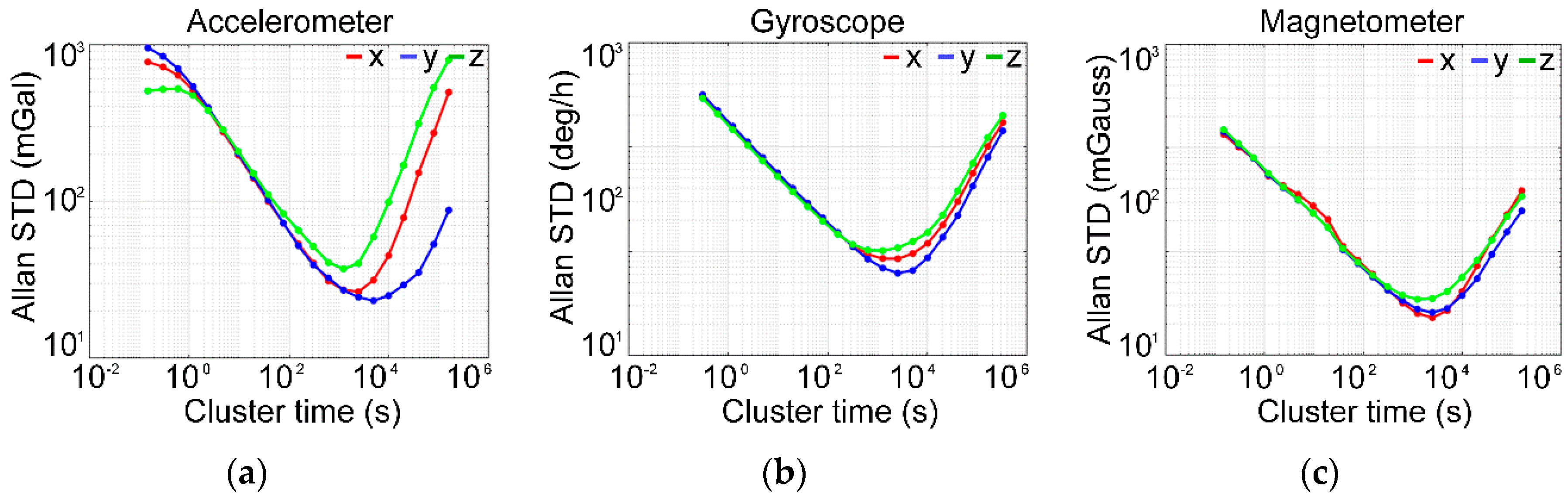
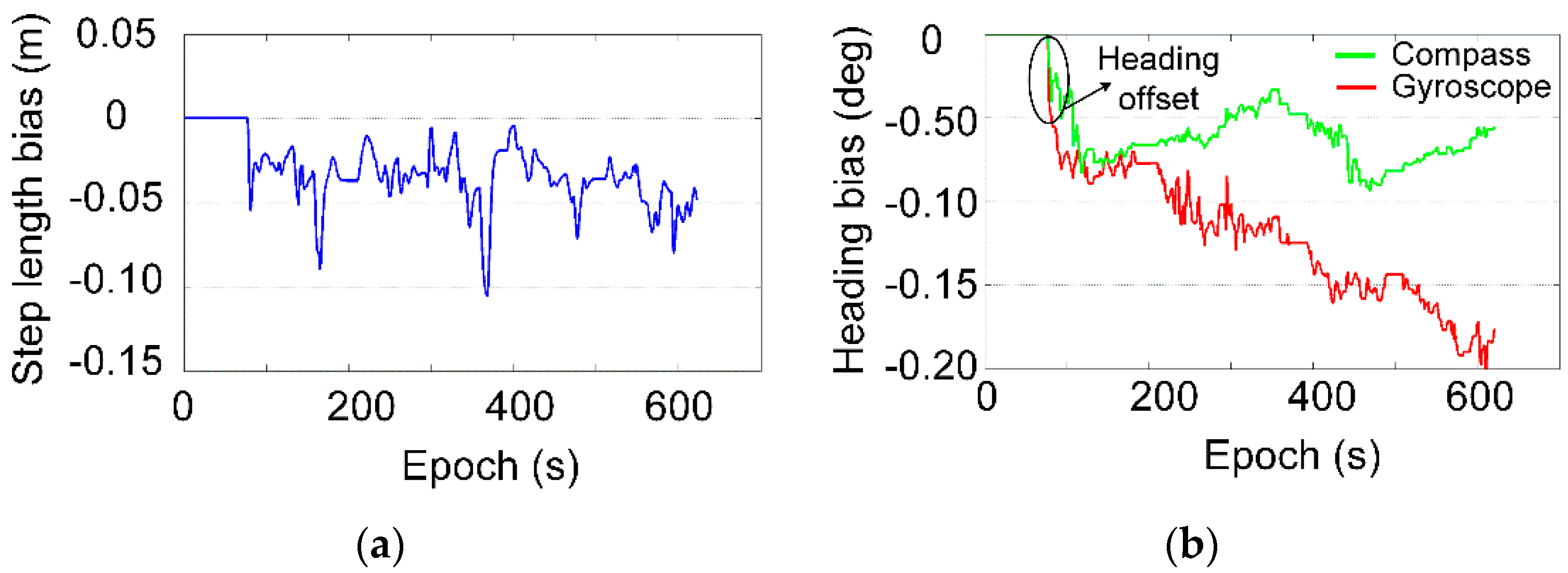
4.2. Stochastic Error of Smartphone MEMS Sensors
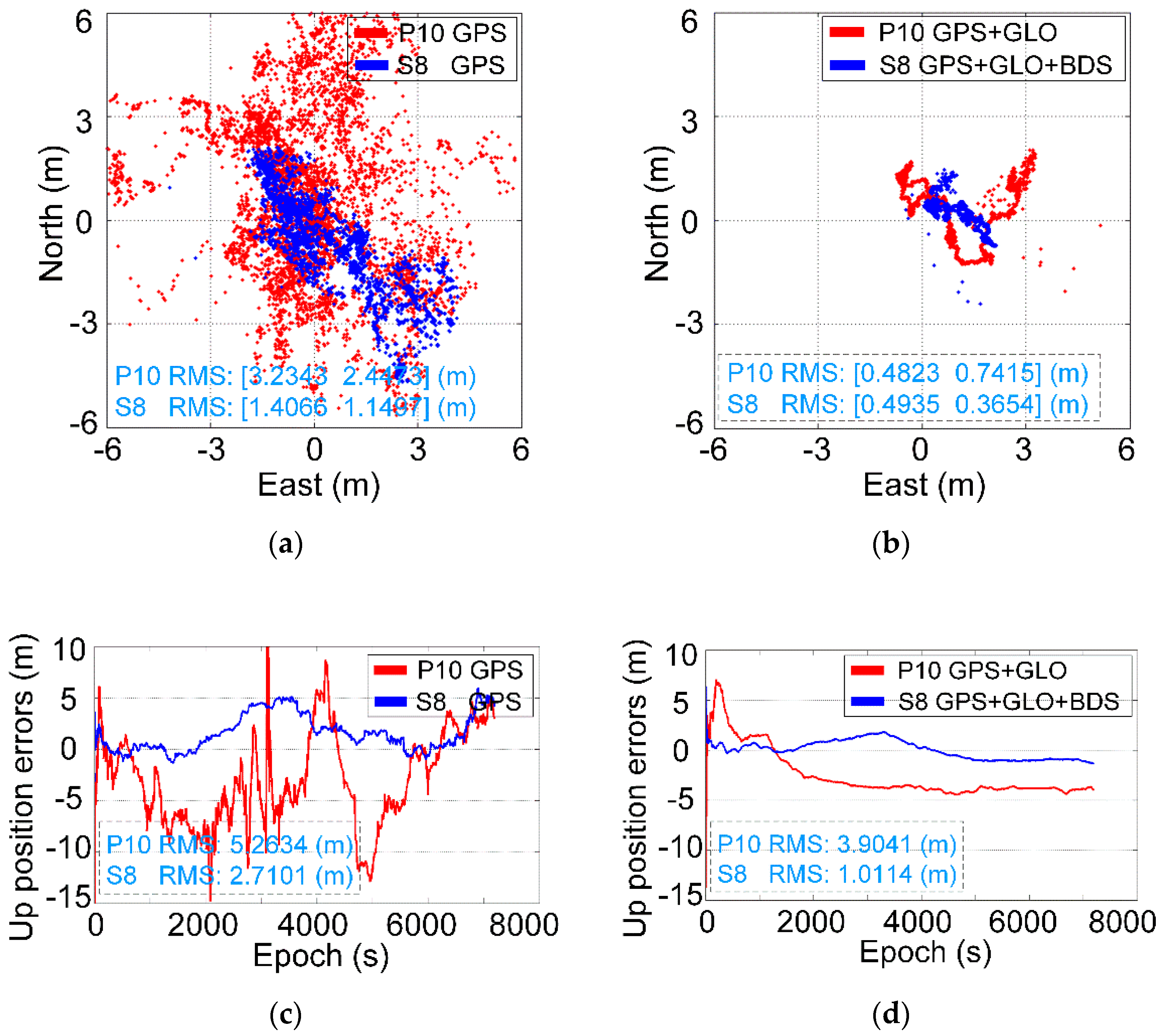
4.3. GNSS Static Positioning Analysis
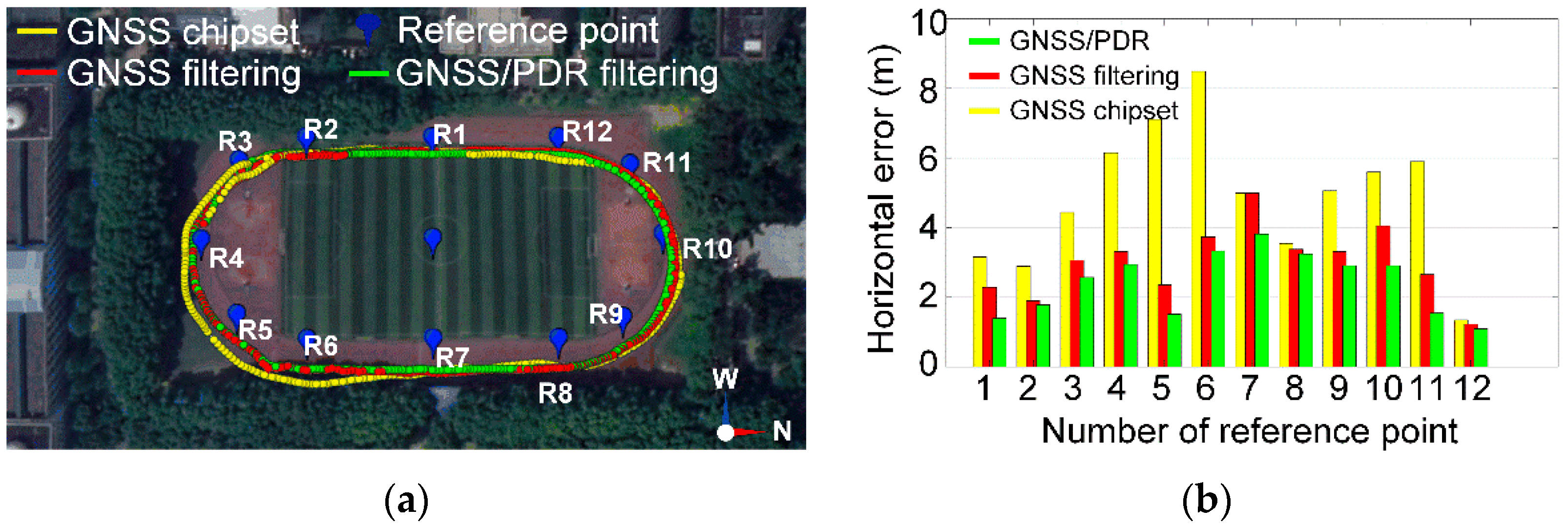
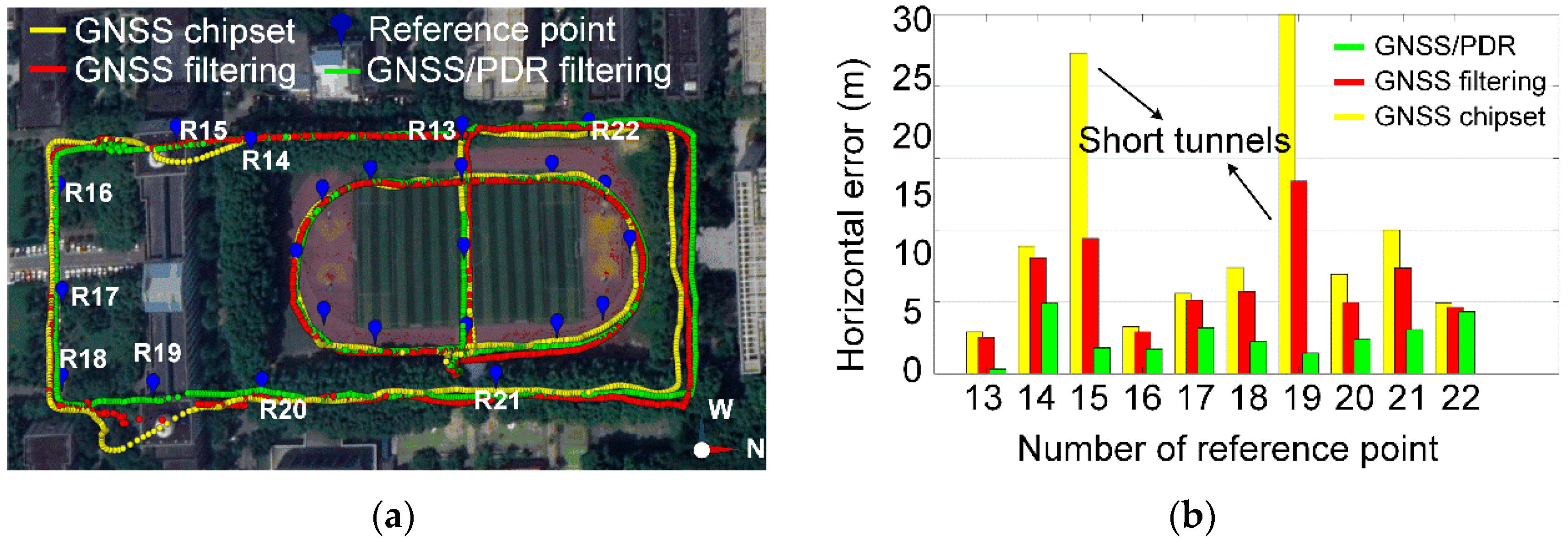
4.4. Integrated Navigation Performance Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Verhagen, S.; Odijk, D.; Teunissen, P.J.G.; Huisman, L. Performance improvement with low-cost GNSS receivers. In Proceedings of the 2010 5th ESA Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), Noordwijk, The Netherlands, 8–10 December 2010; pp. 1–8. [Google Scholar]
- Pesyna, K.M.J.; Heath, R.W.J.; Humphreys, T.E. Centimeter positioning with a smartphone-quality GNSS antenna. In Proceedings of the ION GNSS 2014, Tampa, FL, USA, 8–12 September 2014; pp. 1568–1577. [Google Scholar]
- Humphreys, T.E.; Murrian, M.; van Diggelen, F.; Podshivalov, S.; Pesyna, K.M.J. On the feasibility of cm-accurate positioning via a smartphone’s antenna and GNSS chip. In Proceedings of the IEEE/ION PLANS 2016, Savannah, GA, USA, 11–14 April 2016; pp. 232–242. [Google Scholar]
- Hsu, L.T.; Gu, Y.; Kamijo, S. NLOS correction/exclusion for GNSS measurement using RAIM and city building models. Sensors 2015, 15, 17329–17349. [Google Scholar] [CrossRef] [PubMed]
- Lee, Y.E.; Tao, A.L.; Jan, S.S. Combined Satellite Selection Algorithm and Road Model for GNSS in Constrained Environments. In Proceedings of the ION GNSS 2016, Portland, OR, USA, 12–16 September 2016; pp. 328–334. [Google Scholar]
- Harle, R. A survey of indoor inertial positioning systems for pedestrians. IEEE Commun. Surv. Tutor. 2015, 15, 1281–1293. [Google Scholar] [CrossRef]
- Correa, A.; Barcelo, M.; Morell, A.; Vicario, J.L. A review of pedestrian indoor positioning systems for mass market applications. Sensors 2017, 17, 1927. [Google Scholar] [CrossRef] [PubMed]
- Pham, V.T.; Nguyen, D.A.; Dang, N.D.; Pham, H.H.; Tran, V.A.; Sandrasegaran, K.; Tran, D.T. Highly Accurate Step Counting at Various Walking States Using Low-Cost Inertial Measurement Unit Support Indoor Positioning System. Sensors 2018, 18, 3186. [Google Scholar] [CrossRef] [PubMed]
- Kang, J.; Lee, J.; Eom, D. Smartphone-Based Traveled Distance Estimation Using Individual Walking Patterns for Indoor Localization. Sensors 2018, 18, 3149. [Google Scholar] [CrossRef] [PubMed]
- Lachapelle, G.; Gratton, P.; Horrelt, J.; Lemieux, E.; Broumandan, A. Evaluation of a Low Cost Hand Held Unit with GNSS Raw Data Capability and Comparison with an Android Smartphone. Sensors 2018, 18, 4185. [Google Scholar] [CrossRef] [PubMed]
- Crosta, P.; Zoccarato, P.; Lucas, R.; De Pasquale, G. Dual Frequency mass-market chips: test results and ways to optimize PVT performance. In Proceedings of the ION GNSS 2018, Miami, FL, USA, 24–28 September 2018; pp. 323–333. [Google Scholar]
- Laurichesse, D.; Rouch, C.; Marmet, F.X.; Pascaud, M. Smartphone applications for precise point positioning. In Proceedings of the ION GNSS 2017, Portland, OR, USA, 25–29 September 2017; pp. 171–187. [Google Scholar]
- Realini, E.; Caldera, S.; Pertusini, L.; Sampietro, D. Precise gnss positioning using smart devices. Sensors 2017, 17, 2434. [Google Scholar] [CrossRef] [PubMed]
- Riley, S.; Lentz, W.; Clare, A. On the path to precision—Observations with android GNSS observables. In Proceedings of the ION GNSS 2017, Institute of Navigation, Portland, OR, USA, 25–29 September 2017; pp. 116–129. [Google Scholar]
- Zhang, X.; Tao, X.; Zhu, F.; Shi, X.; Wang, F. Quality assessment of GNSS observations from an android N smartphone and positioning performance analysis using time-differenced filtering approach. GPS Solut. 2018, 22, 70. [Google Scholar] [CrossRef]
- Navarro-Gallardo, M.; Bernhardt, N.; Kirchner, M.; Musial, J.R.; Sunkevic, M. Assessing Galileo Readiness in Android Devices Using Raw Measurements. In Proceedings of the ION GNSS 2017, Portland, OR, USA, 25–29 September 2017; pp. 85–100. [Google Scholar]
- Gioia, C.; Gaglione, S.; Borio, D. Inter-system Bias: Stability and impact on multi-constellation positioning. In Proceedings of the 2015 IEEE Metrology for Aerospace, Benevento, Italy, 4–5 June 2015. [Google Scholar]
- Ciro, G.; Joaquim, F.G.; Fabio, P. Estimation of the GPS to Galileo Time Offset and its validation on a mass market receiver. In Proceedings of the 2014 7th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), Noordwijk, The Netherlands, 3–5 December 2014. [Google Scholar]
- Gioia, C.; Borio, D. A statistical characterization of the galileo-to-gps inter-system bias. J. Geod. 2016, 90, 1279–1291. [Google Scholar] [CrossRef]
- Afifi, A.; EI-Rabbany, A. An Improved Model for Single-Frequency GPS/GALILEO Precise Point Positioning. Positioning 2015, 6, 7–21. [Google Scholar] [CrossRef]
- Freda, P.; Angrisano, A.; Gaglione, S.; Troisi, S. Time-differenced carrier phases technique for precise GNSS velocity estimation. GPS Solut. 2015, 19, 335–341. [Google Scholar] [CrossRef]
- Kuusniemi, H.; Wieser, A.; Lachapelle, G.; Takala, J. User-level reliability monitoring in urban personal satellite-navigation. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1305–1318. [Google Scholar] [CrossRef]
- Zaliva, V.; Franchetti, F. Barometric and GPS altitude sensor fusion. In Proceedings of the 2014 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014; pp. 1520–6149. [Google Scholar]
- Gaglione, S.; Angrisano, A.; Castaldo, G.; Gioia, C.; Innac, A.; Perrotta, L.; Del Core, G.; Troisi, S. GPS/Barometer augmented navigation system: Integration and integrity monitoring. Metrol. Aerosp. 2015, 74, 336–341. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| East (m) | North (m) | Up-Vertical (m) | ||
|---|---|---|---|---|
| Huawei P10 | SPP | 5.3164 | 7.9280 | 14.2151 |
| GNSS chipset | 1.5638 | 1.4062 | 4.8635 | |
| Position filtering | 0.4823 | 0.7415 | 3.9041 | |
| Samsung S8 | SPP | 3.8822 | 4.2733 | 8.7364 |
| GNSS chipset | 1.6545 | 3.8972 | 3.2401 | |
| Position filtering | 0.4935 | 0.3654 | 1.0114 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, F.; Tao, X.; Liu, W.; Shi, X.; Wang, F.; Zhang, X. Walker: Continuous and Precise Navigation by Fusing GNSS and MEMS in Smartphone Chipsets for Pedestrians. Remote Sens. 2019, 11, 139. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11020139
Zhu F, Tao X, Liu W, Shi X, Wang F, Zhang X. Walker: Continuous and Precise Navigation by Fusing GNSS and MEMS in Smartphone Chipsets for Pedestrians. Remote Sensing. 2019; 11(2):139. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11020139
Chicago/Turabian StyleZhu, Feng, Xianlu Tao, Wanke Liu, Xiang Shi, Fuhong Wang, and Xiaohong Zhang. 2019. "Walker: Continuous and Precise Navigation by Fusing GNSS and MEMS in Smartphone Chipsets for Pedestrians" Remote Sensing 11, no. 2: 139. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11020139