Multi-GNSS Combined Precise Point Positioning Using Additional Observations with Opposite Weight for Real-Time Quality Control

 ,
,
Abstract
:1. Introduction
2. Methodology
2.1. Observation Model of Multi-GNSS PPP
2.2. Multi-GNSS Combined PPP Estimation
2.3. Robust Model Based on Additional Observations with Opposite Weight
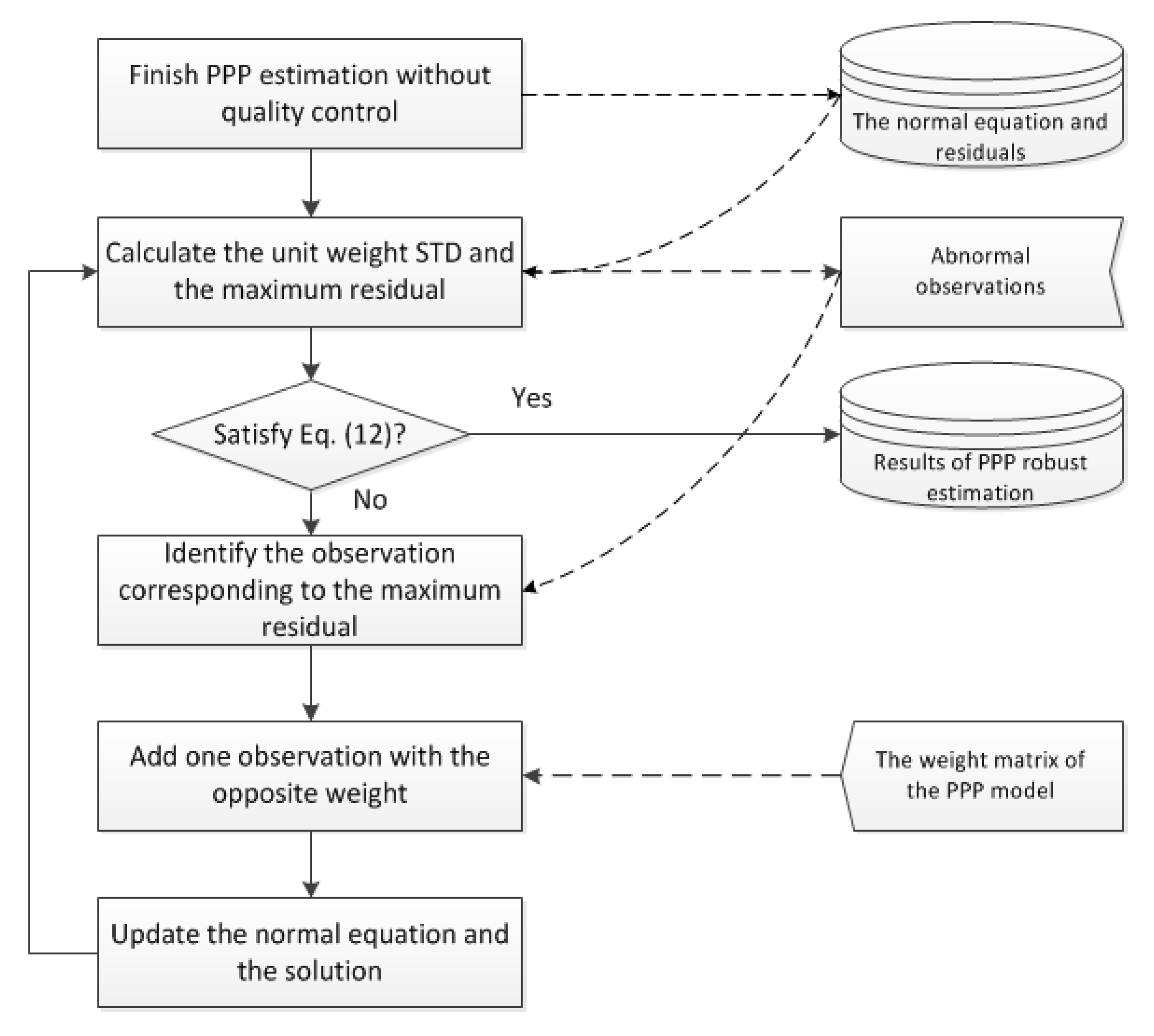
2.4. Real-Time Robust PPP Implementation
3. Data Processing Strategy
4. Experimental Validations
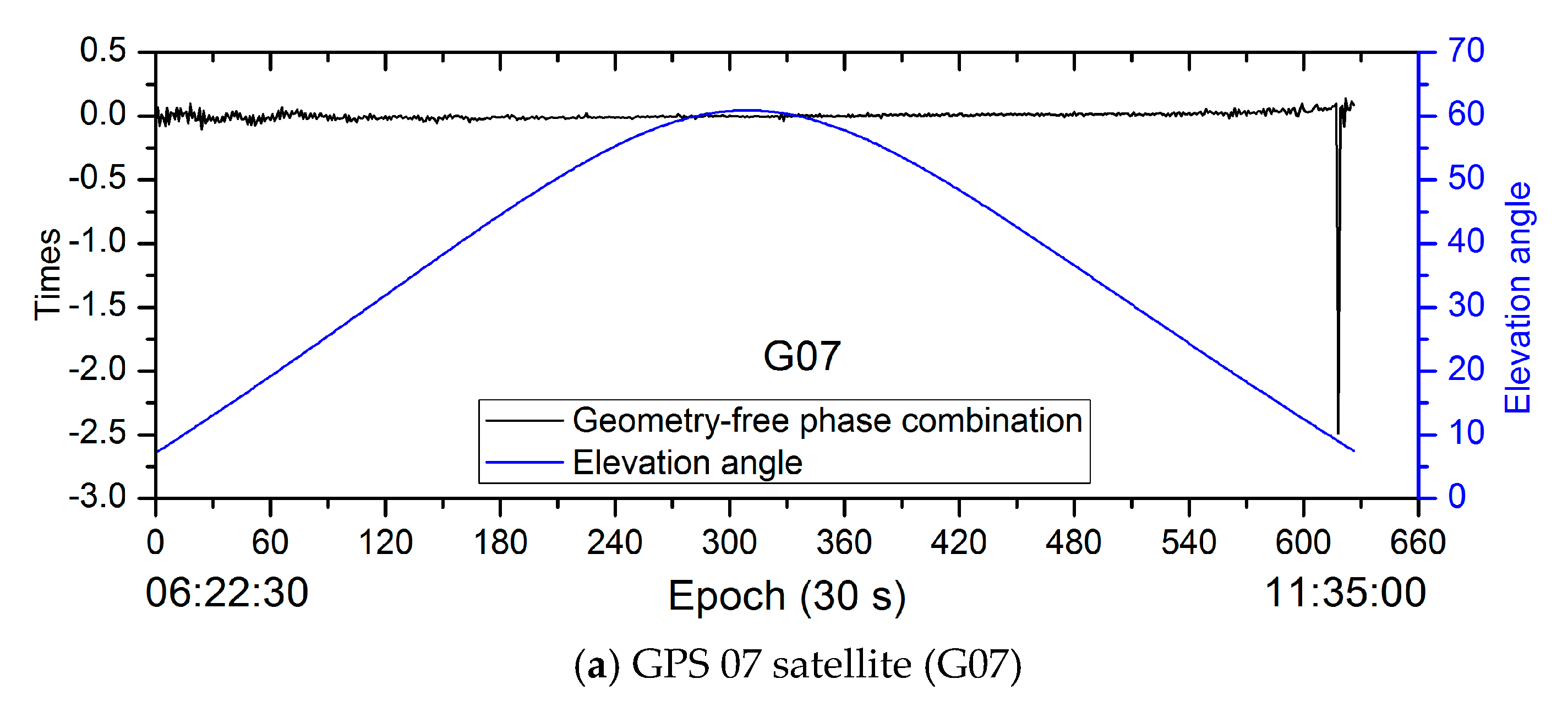
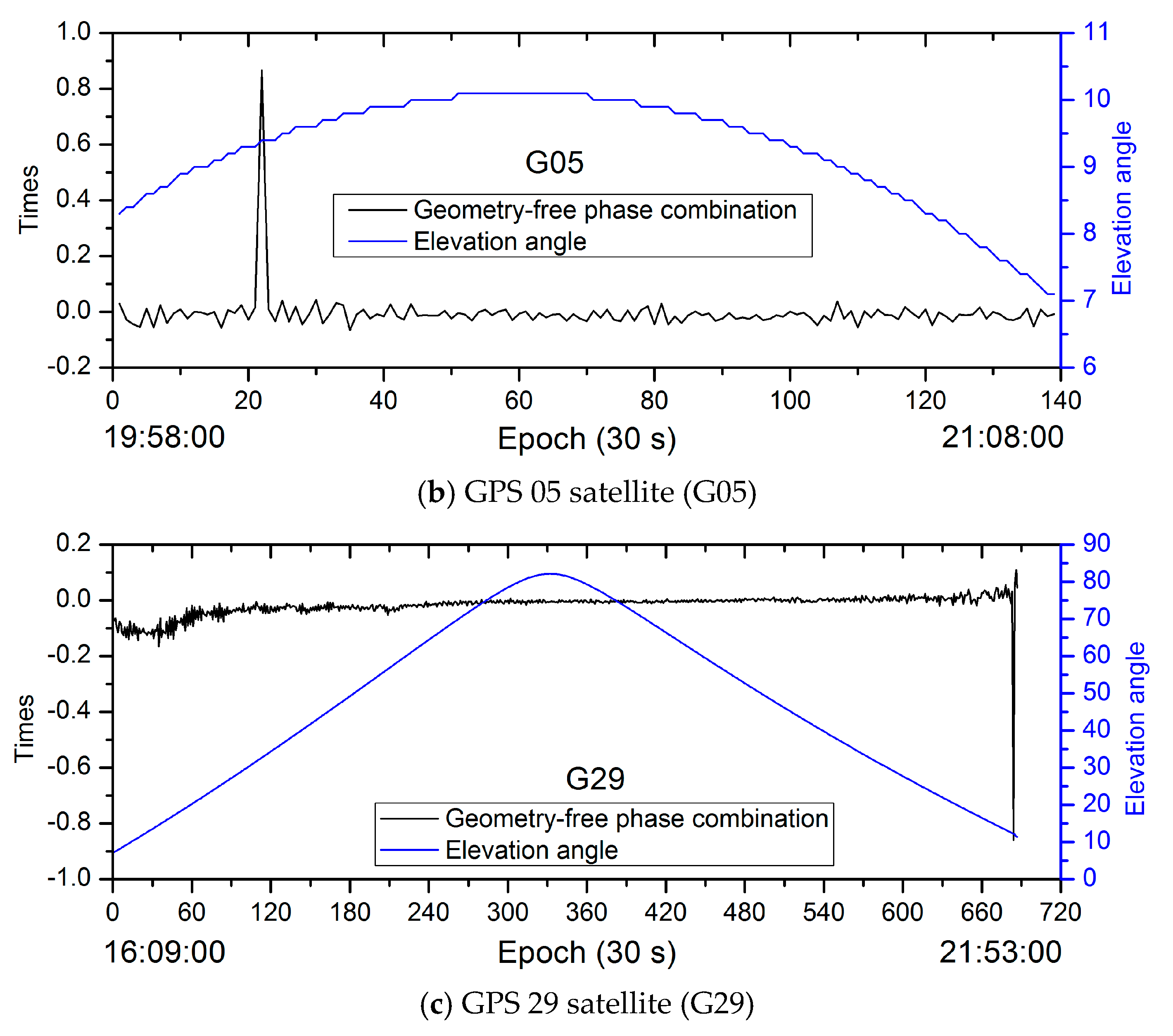
4.1. Influence of Cycle Slips on PPP Estimation
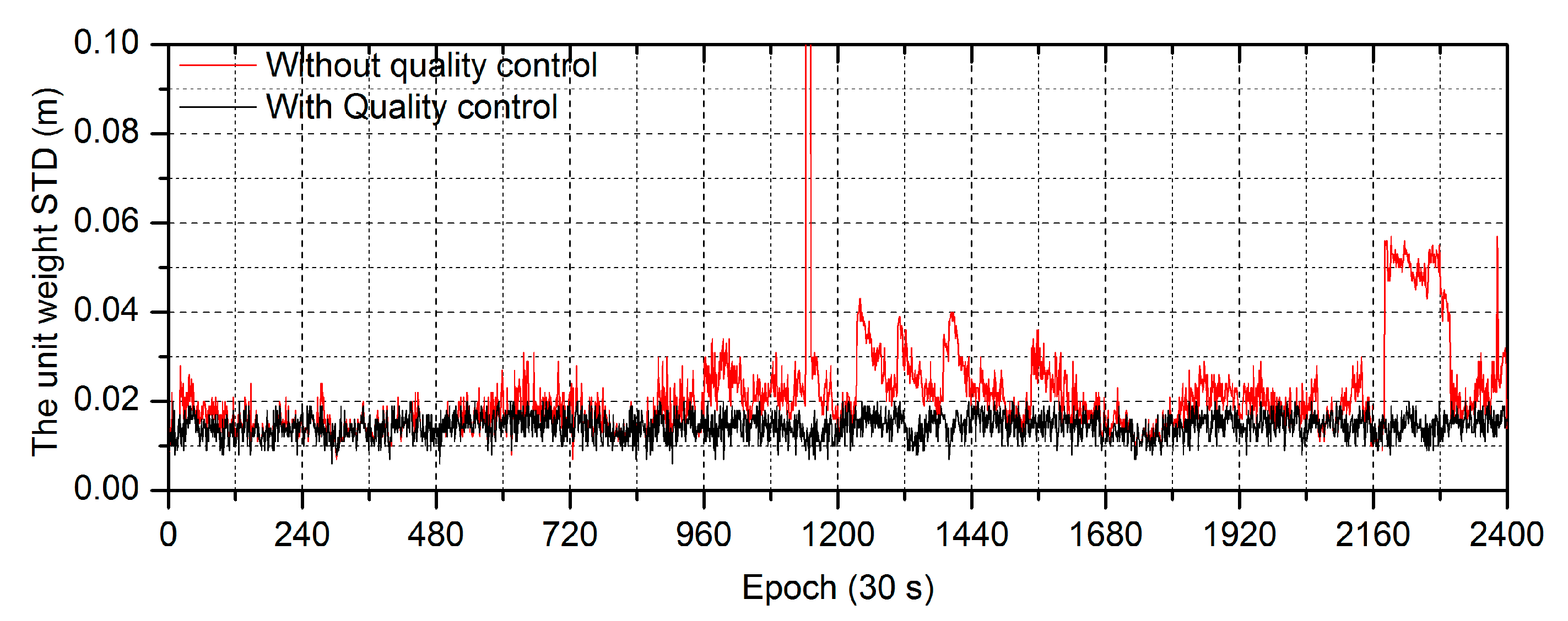
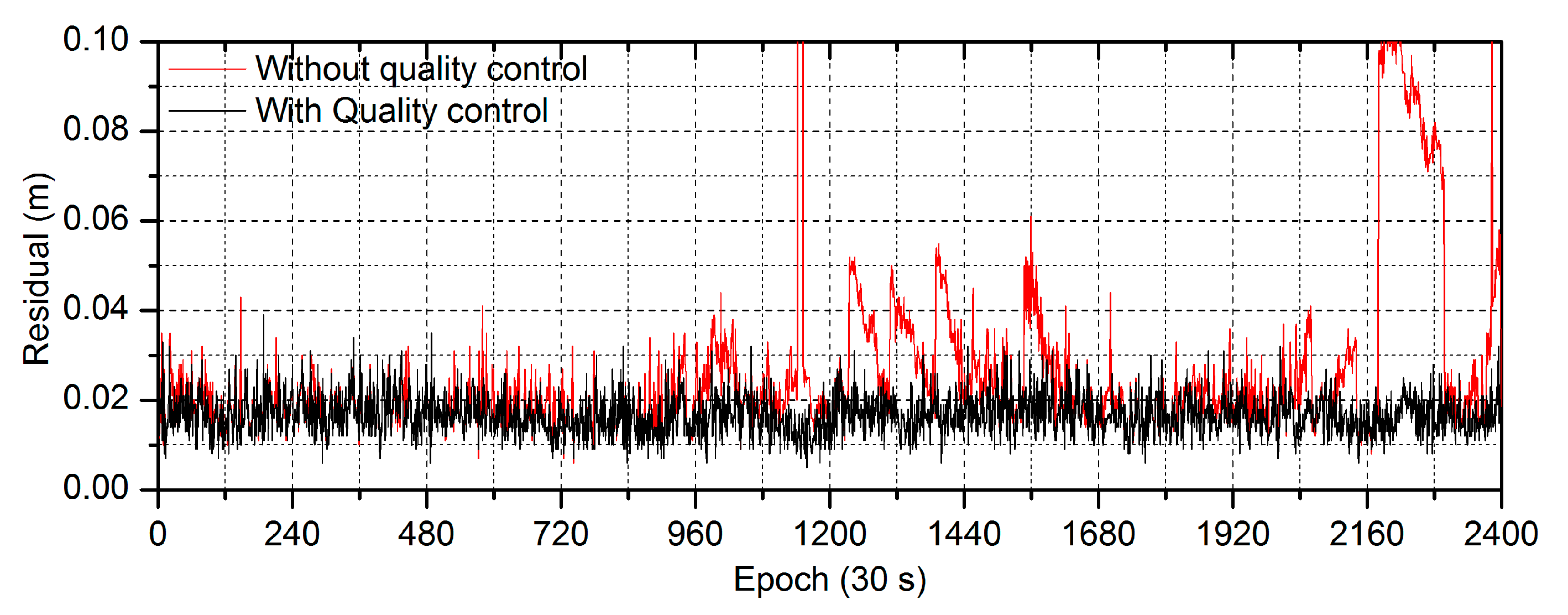
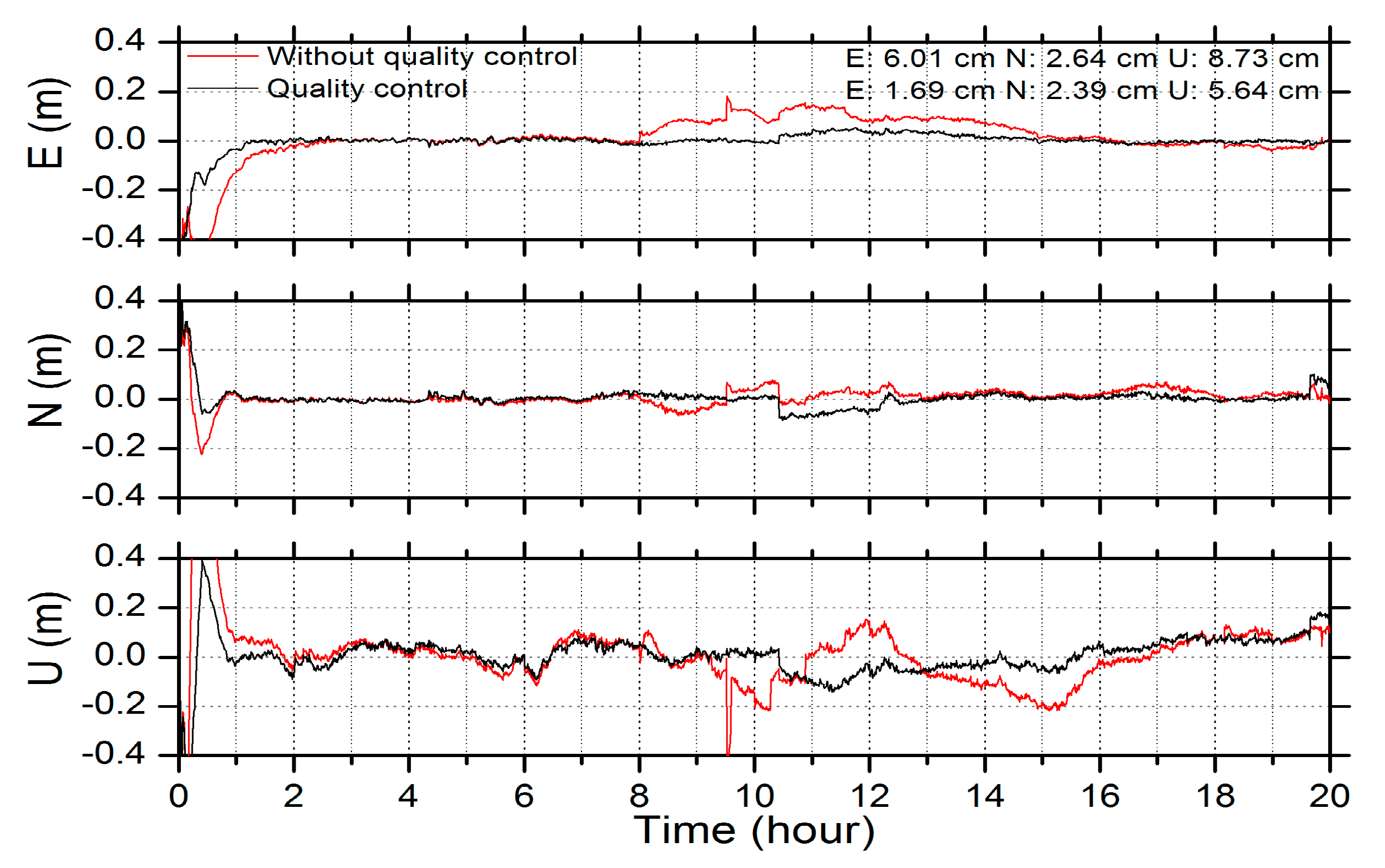
4.2. Comparisons of Real-Time Multi-GNSS PPP with and without Quality Control
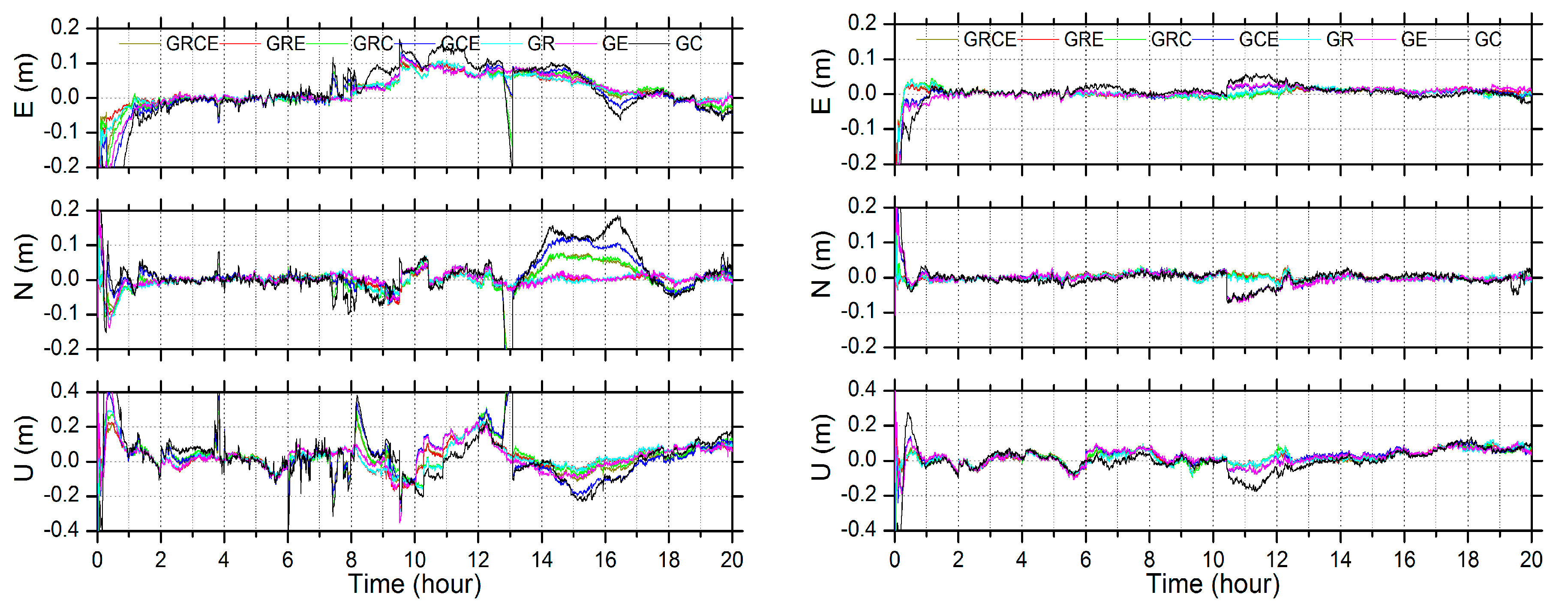
4.3. Assessment of Positioning Performance with the Proposed Quality Control Method
5. Discussions and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chen, K.K.; Xu, T.H.; Yang, Y.X. Robust combination of IGS analysis center GLONASS clocks. GPS Solut. 2017, 21, 1251–1263. [Google Scholar] [CrossRef]
- Huang, G.W.; Zhang, Q.; Xu, G.C. Real-time clock offset prediction with an improved GPS satellite clocks model. GPS Solut. 2014, 18, 95–104. [Google Scholar] [CrossRef]
- Huang, G.W.; Cui, B.B.; Zhang, Q.; Fu, W.J.; Li, P.L. An improved predicted model for BDS ultra-rapid satellite clock offsets. Remote Sens. 2018, 10, 60. [Google Scholar] [CrossRef]
- Kouba, J.; Héroux, P. Precise point positioning using IGS orbit and clock products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Chen, X.M.; Allison, T.; Cao, W.; Ferguson, K.; Grünig, S.; Gomez, V.; Kipka, A.; Köhler, J.; Landau, H.; Leandro, R.; et al. Trimble RTX, an innovative new approach for network RTK. In Proceedings of the ION-GNSS-2011, Portland, OR, USA, 20–23 September 2011; pp. 2214–2219. [Google Scholar]
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J.N. Resolution of GPS carrier-phase ambiguities in Precise Point Positioning (PPP) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Laurichesse, D.; Cerri, L.; Berthias, J.P.; Mercier, F. Real time precise GPS constellation and clocks estimation by means of a Kalman filter. In Proceedings of the ION GNSS, Nashville, TN, USA, 16–20 September 2013. [Google Scholar]
- Gao, Y.; Shen, X. A new method for carrier-phase-based precise point positioning. Navig. J. Inst. Navig. 2002, 49, 109–116. [Google Scholar] [CrossRef]
- Gao, Y.; Chen, K. Performance analysis of precise point positioning using real-time orbit and clock products. J. Glob. Position Syst. 2004, 3, 95–100. [Google Scholar] [CrossRef]
- Leandro, R.; Landau, H.; Nitschke, M.; Glocker, M.; Seeger, S.; Chen, X.M.; Deking, A.; BenTahar, M.; Zhang, F.P.; Ferguson, K.; et al. RTX positioning: The next generation of cm-accurate real-time GNSS positioning. In Proceedings of the 24th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2011), Portland, OR, USA, 20–23 September 2011; pp. 1460–1475. [Google Scholar]
- Li, X.X.; Ge, M.R.; Zhang, H.P.; Wickert, J. A method for improving uncalibrated phase delay estimation and ambiguity-fixing in real-time precise point positioning. J. Geod. 2013, 87, 405–416. [Google Scholar] [CrossRef]
- Wang, L.; Li, Z.S.; Ge, M.R.; Neitzel, F.; Wang, Z.Y.; Yuan, H. Validation and assessment of Multi-GNSS real-Time precise point positioning in simulated kinematic mode using IGS real-time service. Remote Sens. 2018, 10, 337. [Google Scholar] [CrossRef]
- Ding, W.W.; Teferle, F.N.; Kazmierski, K.; Laurichesse, D.; Yuan, Y.B. An evaluation of real-time troposphere estimation based on GNSS Precise Point Positioning. J. Geophys. Res. Atmos. 2017, 122, 2779–2790. [Google Scholar] [CrossRef]
- Guo, J.; Li, X.X.; Li, Z.H. Multi-GNSS precise point positioning for precision agriculture. Precis. Agric. 2018, 19, 859–911. [Google Scholar] [CrossRef]
- Li, Z.; Muller, J.; Cross, P. Comparison of precipitable water vapor derived from radiosonde, GPS, and moderate-resolution imaging spectroradiometer measurements. J. Geophys. Res. 2003, 108. [Google Scholar] [CrossRef]
- Li, X.X.; Zus, F.; Lu, C.X.; Dick, G.; Ning, T.; Ge, M.R.; Wickert, J.; Schuh, H. Retrieving of atmospheric parameters from multi-GNSS in real time: Validation with water vapor radiometer and numerical weather model. Geophys. Res. Lett. 2015, 120, 7189–7204. [Google Scholar] [CrossRef]
- Tu, R.; Wang, R.; Ge, M.R.; Walter, T.R.; Ramatschi, M.; Milkereit, C.; Bindi, D.; Dahm, T. Cost-effective monitoring of ground motion related to earthquakes, landslides, or volcanic activity by joint use of a single-frequency GPS and a MEMS accelerometer. Geophys. Res. Lett. 2013, 40, 3825–3829. [Google Scholar] [CrossRef]
- Li, X.X.; Ge, M.R.; Dai, X.L.; Ren, X.D.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Li, P.; Zhang, X. Integrating GPS and GLONASS to accelerate convergence and initialization times of precise point positioning. GPS Solut. 2014, 18, 461–471. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.G.; Zhao, Q.L.; Perosanz, F.; Romero, L.; Noll, C.; Stürze, A.; Weber, G.; et al. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)—Achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Cai, C.S.; Gao, Y.; Pan, L.; Zhu, J.J. Precise point positioning with quad-constellations: GPS, BeiDou, GLONASS, Galileo. Adv. Space Res. 2015, 56, 133–143. [Google Scholar] [CrossRef]
- Baarda, W. A Testing Procedure for Use in Geodetic Networks; Publications on Geodesy, New Series; Netherlands Geodetic Commission: Delft, The Netherlands, 1968; Volume 2, pp. 1–60. [Google Scholar]
- Knight, N.; Wang, J.L.; Rizos, C. Generalised measures of reliability for multiple outliers. J. Geod. 2010, 84, 625–635. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. Testing Theory: An Introduction, 2nd ed.; VSSD: Delft, The Netherlands, 2006. [Google Scholar]
- Guo, J.; Ou, J.; Wang, H. Quasi-accurate detection of outliers for correlated observations. J. Surv. Eng. 2007, 133, 129–133. [Google Scholar] [CrossRef]
- Yang, Y.X.; Song, L.; Xu, T. Robust estimator for correlated observations based on bifactor equivalent weights. J. Geod. 2002, 76, 353–358. [Google Scholar] [CrossRef]
- Yang, Y.X.; He, H.; Xu, G. Adaptively robust filtering for kinematic geodetic positioning. J. Geod. 2001, 75, 109–116. [Google Scholar] [CrossRef]
- Yang, L.; Wang, J.L.; Knight, N.L.; Shen, Y.Z. Outlier separability analysis with a multiple alternative hypotheses test. J. Geod. 2013, 87, 591–604. [Google Scholar] [CrossRef]
- Fu, W.J.; Huang, G.W.; Zhang, Q.; Gu, S.F.; Ge, M.R.; Schuh, H. Multi-GNSS real-time clock estimation using sequential least square adjustment with online quality control. J. Geod. 2018. [Google Scholar] [CrossRef]
- Lou, Y.D.; Zheng, F.; Gu, S.F.; Wang, C.; Guo, H.L.; Feng, Y.M. Multi-GNSS precise point positioning with raw single-frequency and dual-frequency measurement models. GPS Solut. 2016, 20, 849–862. [Google Scholar] [CrossRef]
- Cai, C.S.; Gao, Y. Modeling and assessment of combined GPS/GLONASS precise point positioning. GPS Solut. 2013, 17, 223–236. [Google Scholar] [CrossRef]
- Fu, W.; Yang, Y.; Zhang, Q.; Huang, G.W. Real-time estimation of BDS/GPS high-rate satellite clock offsets using sequential least squares. Adv. Space Res. 2018, 62, 477–487. [Google Scholar] [CrossRef]
- Liu, T.; Yuan, Y.B.; Zhang, B.C.; Wang, N.B.; Tan, B.F.; Chen, Y.C. Multi-GNSS precise point positioning (MGPPP) using raw observations. J. Geod. 2017, 91, 253–268. [Google Scholar] [CrossRef]
- Ge, M.R.; Gendt, G.; Dick, G.; Zhang, P.F. Improving carrier-phase ambiguity resolution in global GPS network solutions. J. Geod. 2005, 79, 103–110. [Google Scholar] [CrossRef]
- Blewitt, G. An automatic editing algorithm for GPS data. Geophys. Res. Lett. 1990, 17, 199–202. [Google Scholar] [CrossRef]
- Zhou, F.; Dong, D.N.; Li, W.W.; Jiang, X.Y.; Wickert, J.; Schuh, H. GAMP: An open-source software of multi-GNSS precise point positioning using undifferenced and uncombined observations. GPS Solut. 2018, 22, 33. [Google Scholar] [CrossRef]
- Yang, Y.X.; Cheng, M.K.; Shum, C.K.; Tapley, B.D. Robust estimation of systematic errors of satellite laser range. J. Geod. 1999, 73, 345–349. [Google Scholar] [CrossRef]
- Wu, J.; Wu, S.; Hajj, G.; Bertiger, W.; Lichten, S. Effects of antenna orientation on GPS carrier phase. Manuscr. Geod. 1993, 18, 91–98. [Google Scholar]
- Dilssner, F.; Springer, T.; Schonemann, E.; Enderle, W. Estimation of satellite antenna phase center corrections for BeiDou. In Proceedings of the IGS Workshop 2014, Pasadena, CA, USA, 23–27 June 2014. [Google Scholar]
- Schmid, R.; Steigenberger, P.; Gendt, G.; Ge, M.R.; Rothacher, M. Generation of a consistent absolute phase center correction model for GPS receiver and satellite antennas. J. Geod. 2007, 81, 781–798. [Google Scholar] [CrossRef]
- Petit, G.; Luzum, B. IERS Conventions (2010), IERS Technical Note 36. Available online: http://tai.bipm.org/iers/conv2010/ (accessed on 10 February 2019).
- Boehm, J.; Niell, A.; Tregoning, P.; Schuh, H. Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2006, 33, L07304. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Models |
|---|---|
| Observations | Undifferenced phase and code ionosphere-free combination observations |
| Elevation mask | 7° |
| Observation weight | Elevation-dependent weight, 1 for elevation angle (E) > 30°, otherwise 2sin(E) |
| Adjustment | Sequential least square |
| Phase-windup effect | Corrected [38] |
| Satellite antenna phase center and variation | Global positioning system (GPS), global navigation satellite system (GLONASS), Galileo: IGS14.atx; Beidou navigation satellite system (BDS): European space agency (ESA) Model [39,40] |
| Receiver antenna phase center and variation | GPS: IGS14.atx; GLONASS, Galileo, BDS: same as GPS |
| Station displacement | Solid Earth tide, pole tide, ocean tide loading: IERS Convention 2010 [41] |
| Relativistic effects | Corrected (IERS 2003) |
| Satellite orbit | German research centre for geosciences (GFZ) multi-GNSS (GBM) final product |
| Satellite clock | GFZ GBM final product |
| Receiver clock | Estimated, white noise |
| Station coordinate | Estimated, white noise |
| Tropospheric delay | Saastamoinen model and global mapping function (GMF) [42], and estimated as piecewise constants with a step size of one hour |
| the intersystem biases (ISBs) | Estimated as constant parameters |
| Phase ambiguities | Estimated as a constant for each continuous arc |
| System | No Control | Quality Control | ||||
|---|---|---|---|---|---|---|
| E (cm) | N (cm) | U (cm) | E (cm) | N (cm) | U (cm) | |
| GRCE | 4.66 | 4.87 | 10.17 | 0.79 | 0.86 | 4.24 |
| GRC | 4.86 | 5.23 | 11.35 | 0.99 | 0.88 | 4.44 |
| GRE | 4.33 | 1.45 | 7.55 | 0.90 | 0.85 | 4.43 |
| GCE | 5.09 | 7.22 | 11.50 | 1.14 | 1.77 | 4.96 |
| GR | 4.37 | 1.51 | 7.37 | 0.98 | 0.82 | 4.35 |
| GE | 4.71 | 1.61 | 7.94 | 1.32 | 1.79 | 4.72 |
| GC | 6.68 | 8.78 | 12.80 | 1.81 | 1.82 | 5.64 |
| System | No Control | Quality Control | ||
|---|---|---|---|---|
| H (min) | V (min) | H (min) | V (min) | |
| GRCE | 5.5 | 45.5 | 8.0 | 6.5 |
| GRC | 31.0 | 49.0 | 9.0 | 9.5 |
| GRE | 22.5 | 4.5 | 8.5 | 4.5 |
| GCE | 48.5 | 49.0 | 13.0 | 31.5 |
| GR | 31.5 | 49.0 | 9.0 | 6.5 |
| GE | 45.5 | 49.5 | 14.5 | 31.5 |
| GC | 64.0 | 80.5 | 29.5 | 40.5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, W.; Huang, G.; Yang, Y.; Zhang, Q.; Cui, B.; Ge, M.; Schuh, H. Multi-GNSS Combined Precise Point Positioning Using Additional Observations with Opposite Weight for Real-Time Quality Control. Remote Sens. 2019, 11, 311. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11030311
Fu W, Huang G, Yang Y, Zhang Q, Cui B, Ge M, Schuh H. Multi-GNSS Combined Precise Point Positioning Using Additional Observations with Opposite Weight for Real-Time Quality Control. Remote Sensing. 2019; 11(3):311. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11030311
Chicago/Turabian StyleFu, Wenju, Guanwen Huang, Yuanxi Yang, Qin Zhang, Bobin Cui, Maorong Ge, and Harald Schuh. 2019. "Multi-GNSS Combined Precise Point Positioning Using Additional Observations with Opposite Weight for Real-Time Quality Control" Remote Sensing 11, no. 3: 311. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11030311