1. Introduction
Monitoring the change in water quality through remote sensing techniques has recently become a topic of major interest. Thus, maintaining water of good quality is highly important and necessary. An efficient and labor-saving method for quantitatively computing the content level of five water quality parameters including phosphorus, nitrogen, biochemical oxygen demand (BOD), chemical oxygen demand (COD), and chlorophyll-a (
Chla) has been developed due to the practical needs of human beings’ lives. Phosphorus and nitrogen are associated with eutrophication [
1,
2] and severe eutrophication can cause the considerable accumulation of
Chla [
3]. High levels of
Chla may cause the death of aquatic creatures such as fish and shrimp and the amount of aquatic life, including aquatic animals and plants, is highly associated with levels of BOD and COD [
4]. In the past few years, multispectral remote sensing as an orthodox method was an important method to categorize the level of water quality [
5].
Nowadays, although methods of multispectral remote sensing analysis for the quantitative estimation of water quality parameters have obtained relatively accurate results, they are time-consuming and expensive [
6]. Another hyperspectral remote sensing method has quickly developed due to practical needs not only for categorizing the level of water quality, but also for the cost-efficient and time-saving quantitative analysis of water quality parameters. A wide variety of methods concerning remote sensing to categorize the level of water quality or to assess the content level of water quality parameters mainly include empirical methods [
7,
8,
9], semi-analytical methods [
10,
11], and deep learning methods [
12,
13,
14] to quantify water quality parameters and classify water quality level through hyperspectral data [
15]. For example, Gholizadeh et al. [
7] proposed an empirical method of regression featuring band ratios and band combinations to assess the content level of water quality parameters including phosphorus, COD, BOD, and
Chla, which selected bands based on the spectral features of target objects. Li et al. [
8] proposed another empirical method to estimate
Chla content with a relative percent difference (RPD) less than 30.45% at a high solar zenith angle. Another empirical method [
9] sought to find band combinations that result in the strongest correlation by regression-given features against the content level of the target object, which gave a relatively high
over 0.7 for some water quality parameters, including
Chla, suspended solids, and colored dissolved organic matter. Furthermore, Campbell et al. [
11] came up with a semi-analytical matrix inversion method (MIM) which aimed at quantitatively predicting
Chla content with Medium Resolution Imaging Spectrometer (MERIS) images of an in-water light field with a mean difference of 1.0 μg/L. Chebud et al. [
12] proposed an Artificial Neural Network (ANN) method to estimate the water quality parameters of phosphorus, turbidity, and
Chla quantitatively with over 0.95
value, and the root mean squared error (RMSE) 0.17 mg/m
3, 0.5 nephelometric turbidity unit (NTU), and 0.03 mg/L, respectively. Moreover, Pyo et al. [
14] proposed a convolutional neural network (CNN) with the purpose of regression in terms of the water quality parameter
Chla, which gave 0.73 as the
value, assisted by hyperspectral image data. Our proposed method is an improved deep learning method combining Bayesian probability analysis to obtain the content level of water quality parameters, the basic structure of which is similar to regression neural network methods [
13,
14], to some extent. Multispectral image analysis [
16] makes use of satellite data through machine learning methods to classify the level of water pollution where some nuanced changes in water quality are seldom observed [
17]. These studies have shown that remote sensing techniques applied for monitoring water quality have developed to an acceptable extent, and can provide significant and synoptic views of various types of water.
However, the data requirement for monitoring water quality is the high volume of satellite image data, which is time-consuming and expensive to obtain. Additionally, obtaining satellite images, such as (Medium Resolution Imaging Spectrometer) MERIS, usually takes 2–3 days, meaning that the use of satellite images to monitor the change in water quality in situ and in real time is not possible [
6]. Although some of the abovementioned studies may provide acceptably accurate results for predicting water quality parameters quantitatively, they do not extract all significant information from a mixed spectrum for each pure material, which may cause a great loss of significant information [
11,
14,
17,
18]. Moreover, some studies require a considerable amount of satellite images for their model training [
6,
16,
19] and employ one-time forward methods to calculate water quality parameters without backpropagation or feedback. Thus, if additional data is needed in the training set, their models have to be trained again rather than improved based on the previous models. Satellite images may not have a high spatial resolution and often have pixel sizes of hundreds of meters by hundreds of meters, such as MERIS [
6], which can hardly be used as predictors to estimate the reasonably legible distribution of water quality parameters of small area.
In this study, a new hybrid Bayesian probabilistic neural network (BPNN) is developed, using Unmanned Aerial Vehicle (UAV) hyperspectral image reflectance data as the input to spatially estimate water quality parameter data. Hybrid BPNN can predict the water quality parameters effectively and precisely, even if the testing data is much larger than training dataset. Ordinary Bayesian neural networks (BNN) have been used in other fields, such as the retrieval of the characterization of land surface vegetation [
20] and water quality classification and identification [
21,
22]. Hybrid BPNN has been implemented to monitor the change in water quality parameters quantitatively for large scale datasets.
As a result, the following sections of this paper are organized as follows:
Section 2 discusses the dataset used in this study and demonstrates how the dataset is preprocessed in the proposed model.
Section 3 elucidates the hybrid BPNN technique, its working mechanism, and all theoretical supports concerning our proposed method.
Section 4 analyzes the experimental results from different perspectives, compares our proposed model with other models of similar functions, and shows the application of the proposed method on the entire study area.
Section 5 provides a discussion about the results and pertinent studies.
Section 6 gives the conclusion.
3. Methodology
The proposed model mainly consists of three parts, a BPNN, a deep neural network (DNN), and a feature extractor. BPNN is improved from the traditional Bayesian neural network (BNN), which includes probabilistic analysis feedback, variational inference, backpropagation, Metropolis–Hasting sampling, and an asymptotic maximum likelihood estimator for balancing the distributional parameters.
Figure 2 shows the workflow of the proposed method of hybrid BPNN to estimate the water quality parameters in a large area. Firstly, the ground sample is divided into two parts, ASD reflectance data and the results of water quality parameters, respectively, which work as the training dataset for establishment of the hybrid BPNN model. The feature extraction machine extracts the significant information for each water quality parameter from a mixed spectrum. Secondly, the extracted featuring information from the hyperspectral image data works as the input to refine the data by transferring UAV feature information obtained from Equation (2) to ASD-obtained feature information through the transferring model [
27], such that the refined UAV data from Equation (3) can be used to calculate the results quantitatively in the proposed model. Finally, the package of ArcGIS was applied to generate thematic images. In the proposed method, there is no need to tune a large number of hyperparameters to the dataset, as this takes quite a lot time and is economically deficient. Additionally, we used the revised spectral reflectance of water, collected using a ground-based Analytical Spectral Device (ASD).
During the process of building up the hybrid BPNN model, we needed training data, including water surface reflectance. The model assumes that each of the weight parameters have a practical distribution and, in this study, all weight parameters are initialized in the hidden layers of the BPNN model in a standard normal distribution. Thus, using BPNN will reduce the time required to tune hyperparameters to the data. The regular numerical gradient descent was not used to calculate the exact values of weights in each hidden layer to minimize the difference between predicted values and measured values. Instead, we will assign probability distributions for weights in each hidden layer and use Kullback–Leibler (KL) divergence [
36] to describe how our hypothetical distribution of weights approximates real distribution of weights. KL divergence is applied for the indication of the difference between the real distribution of the parameters of the proposed model and the presumable distribution of the proposed model. To figure out the distribution of each weight in hidden layers, we try to solve the following:
where
is the real distribution of each weight and
is the presumable distribution. However,
is difficult to solve directly, Thus, we instead use the Evidence of Lower Bound (ELBO) to minimize KL divergence (details can be found in
Appendix A):
The maximization of
can be done since
and
are tractable (details can be found in the
Appendix B).
We can solve the optimization problem of Equation (6) by solving Equation (5):
where
represents the energy and
represents the entropy of
. In our study, we can obtain noise estimates for
and its corresponding gradients (details can be found in
Appendix C), and we follow iterative steps:
Draw samples with the Metropolis–Hasting sampler ;
Estimate the parameters of expectation using samples;
Compute the empirical mean of the estimated values.
Therefore, the Monte Carlo estimates of the gradients are
The loss function for DNN is defined as
where
,
is the
th predicted result from DNN,
denotes the size of the parameter set, and
denotes the sample size.
By combining all abovementioned parts, we construct our proposed method structure as shown in
Figure 3, where the feature extraction machine preprocesses reflectance data, including two parts, the extraction of the featuring bands from the formerly transferred reflectance and the transfer of the reflectance from the UAV hyperspectral imager to the reflectance from ground ASD. The theoretical support for this aspect of BPNN is mentioned above, as is the workflow for updating the parameters in each distribution of weights in hidden layers by maximizing the ELBO [
37]. We use the score gradient function for updating the parameters in order to further reduce the loss of the conventional neural network. Additionally, the initial settings for BPNN are leaky Rectified Linear Unit (ReLu) as an activation function and standard normal distribution as each weight distribution in the hidden layers. The optimizer function is set as an Adam optimizer. The DNN wroks as a conventional feature used for balancing numerical regression, with the loss function (Equation (8)) to be minimized in order to update the parameters in each of the hidden layers using gradient descent. The initial setting for the activation of DNN is also leaky ReLu. Furthermore, we combine the results from BPNN and DNN to output the final results of the content level of each water quality parameter, as mentioned earlier.
Furthermore, a point-centered CNN regression method to quantify the content level of
Chla achieved moderate accuracy with
of 0.73 outperforming other conventional optical algorithms in the study area of Baekje weir [
14]. However, this method did not cover all narrow-ranged possible values since the point-centered CNN regression method used the chosen features of hyperspectral remote sensing image data as the input and the result as a class of numerical values rather than a numerical value of regression as the output. A semi-analytical method using maximum likelihood analysis for the map water quality parameter
Chla was implemented on large scale, but with a relatively coarse resolution of 8 m by 8 m [
38]. This method concluded that the relationship between remote sensing reflectance and water quality parameters is a linear model by analyzing the water constituents at different depths, and evaluating the performance of the model using RMSE. However, their samples were collected from simulated data, but not in situ data. An empirical method to map
Chla and suspend solids and turbidity through spectral characteristics, such as band ratios and other water quality parameter quantities as inputs in a linear regression, neglected some important information about other bands, even if their
values were relatively high and RMSEs were relatively low.
In this study, we evaluate the performance of our proposed model by
value, RMSE, and mean percent of absolute error (MPAE). Moreover, the reason for using hyperspectral image data from UAV is that UAV can work cost-efficiently on a large scale, with less time spent and a higher reflectance precision [
39]. The working mechanism deployed in this research can be explained by
Figure 2, and the structure of the proposed model can be demonstrated by
Figure 3. To quicken the process of prediction of the content levels of water quality parameters, we will use PySpark and Graphics Processing Unit (GPU)-based Tensorflow to calculate the resulting values on large scale.
4. Applications and Results
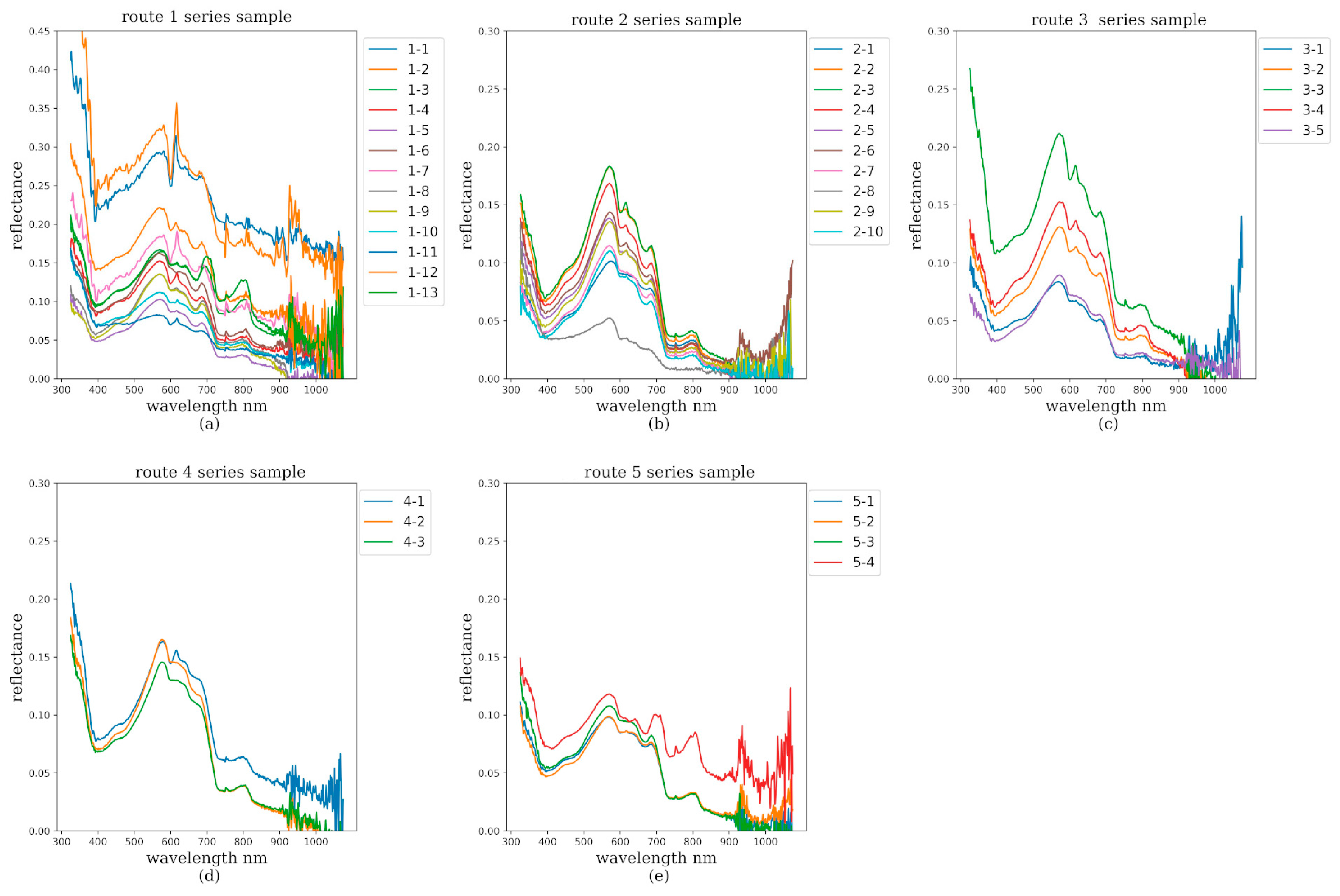
Figure 4 shows the reflectance from in situ collected ASD reflectance on different routes covering the whole study area. The difference in the reflectance of each plot in
Figure 4 is not striking, since we repeated the calibration using a standard white panel with a known radiance and a corresponding DN value every time we went to another sample site to collect samples.
Figure 4 shows that the content levels of almost all abovementioned water quality parameters in the route 1 series are relatively higher than those of others. Although there is some noise in
Figure 4, the proposed model has an end to end structure, including feature engineering, which denoises the original reflectance, obtaining the feature information (PCA) for projecting the denoised reflectance, and transferring UAV featuring information into ground featuring information. Equation (3) helps to reduce medium interference, as stated in
Section 2. The low reflectance values in
Figure 4a value may be caused by nitrogen and phosphorus absorption at reflectances near 900 nm [
27,
40,
41]. Additionally, there is a big jump to higher reflectance values around 560 nm and a drop to lower reflectance values around 750 nm followed by a small peak around 800 nm and great jump to higher reflectance values around 900 nm which may be a reason for the high concentration of COD, BOD, and
Chla [
42,
43,
44]. Meanwhile,
Figure 4b indicates that the wavelengths have similar distributions of reflectance as in
Figure 4a and the only apparent difference between them is the fact that reflectance values of
Figure 4b are mostly lower than those of
Figure 4a near 900 nm, where the content levels of phosphorus, nitrogen, COD, BOD, and
Chla, are lower than those of
Figure 4a [
40]. The low values of
Figure 4b can be caused by interference by a flowing and wavy water surface and partial shadow.
Figure 4c has similarly lower values of phosphorus, nitrogen, and
Chla with
Figure 4b for a similar reason [
40,
41]. The reason for the relatively low values in
Figure 4c may be caused by the shadow or the absorption of other materials discharged from factories along river banks [
40,
41].
Figure 4d has a similar distribution of reflectance with
Figure 4c but the concentrations of phosphorus, nitrogen,
Chla, and COD are lower than those in
Figure 4c. Noteworthily, the content levels of nitrogen, phosphorus, and COD may correspond to wavelengths of 900 nm since
Figure 4b–d has a relatively lower peak in reflectance values near 900 nm [
45,
46].
Figure 4e gives a similar reflectance to
Figure 4a, where the content levels of water quality parameters from them are similar as well.
Figure 5 shows the reflectance values of samples collected by UAV.
Table 2 shows the range of each of water quality parameters from different routes. As shown in
Table 2, same water quality parameters from different routes differ from each other. Some values of water quality parameters are different because some of them are near a working drainage system.
Figure 6 shows the training loss plot over epoch, where loss is defined as RMSE and the epoch is defined as an iteration number. The iterations required to train the proposed model is 3000. The loss of
Figure 6a–d remains stable around 1000 training iterations and
Figure 6e remains stable at 1500 training iterations. Possible explanations for the comparatively slow convergence of loss in
Chla can be demonstrated from two perspectives. On the one hand, some water samples have same content levels of
Chla corresponding to difference reflectance values, since the measuring precision of the experimental measuring apparatus is unable to distinguish a subtle difference less than one unit of μg/L. On the other hand, some possible noising bands, which currently cannot be detected, certainly affect the performance of the proposed model.
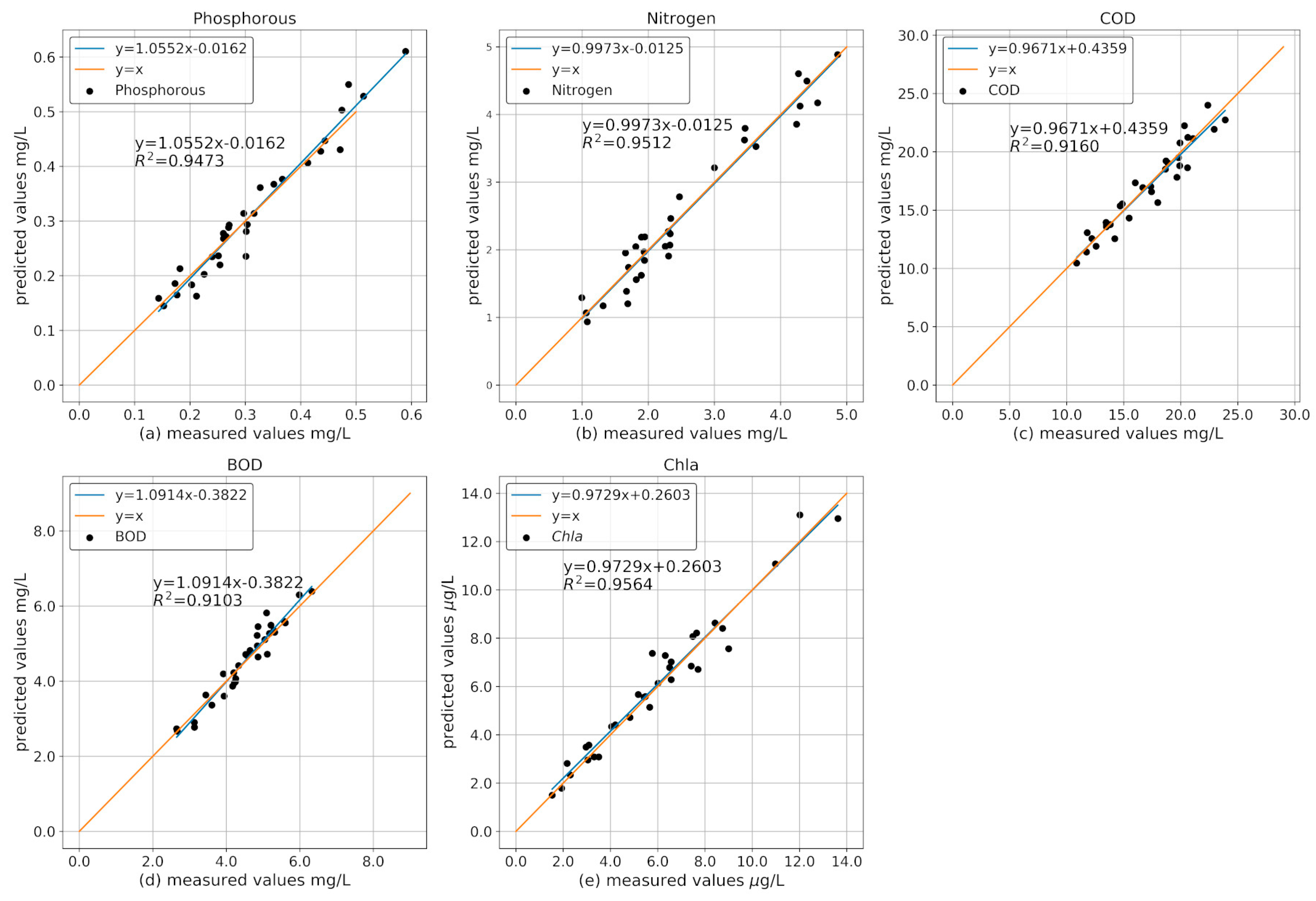
Figure 7 shows the predicted precision of each water quality parameter by comparing predicted values with measured values. The further off the blue line predicted values are, the lower the predicted precision of the proposed model is. The orange line is the regression line between predicted values and measured values. From the goodness-of-fit of the data, nitrogen and
Chla obtain the best results. The RSMEs for
Figure 7a,b are 0.03, 0.26, 3.15, 0.46, and 0.69, respectively. The MPAE for
Figure 7a,b are 8.59%, 3.78%, 8.26%, 7.35%, and 5.43%, respectively.
The water surface band reflectance might suffer uncertainty, which then results in more error in the estimation of water quality estimation. In order to illustrate such an effect, some levels of deviation in the band reflectance are added artificially into the original data.
Figure 8 shows a comparison plot of predictions based on different percent deviations in the band reflectance from th perspective of RMSE, given by the proposed hybrid BPNN model. Furthermore, each graph shows that the prediction with 5% deviation from the band reflectance outperforms the others—namely predictions based on the reflectance of 10% and 15% deviations with respect to RMSE. The prediction with 15% deviation from the band reflectance results in the largest error compared to others in each plot.
Figure 8 shows that there is a strong relationship between the band reflectance and the concentration of each water quality parameter [
27]. It also demonstrates that the more the reflectance deviates from the original band reflectance, the precision explained by RMSE will be lower. Each water quality parameter is calculated using the hybrid BPNN method using the changes in the band reflectance.
This study employed 35 samples collected one day after the collection of the training dataset as the testing dataset.
Figure 9 displays the comparison between predicted and ground-measured values from the testing dataset. The proposed method quantitatively predicts phosphorus, nitrogen, COD, BOD, and
Chla, clarifying its generality and high accuracy. The accuracy of training results in
Figure 7 and
Figure 9 is similar, demonstrating that the proposed model is generalized and effective. The mathematical and statistical results of
Figure 9 are demonstrated and compared with other models tested on the same dataset in
Table 2.
Figure 10 shows the negative ELBO plots of each water quality parameter. As stated earlier in
Section 3, we are intended to approximate the real distribution of each weight in hidden layers with a known distribution by minimizing the KL divergence [
37]. To minimize the KL divergence between the real distribution of a random variable and the approximate distribution of the same variable, we tried to maximize the ELBO to make our hybrid BPNN model converge where the hybrid BPNN model has been trained 20,000 times to get the best results for ELBO.
Table 3 shows the performance of different methods on the same testing dataset, including our proposed method, hybrid BPNN, traditional ANN with the backpropagation method [
14], a semi-analytical method [
11] and an empirical regression method [
7,
9] on the testing dataset of the whole study area. Our hybrid BPNN method is superior to other methods in terms of RMSE, MPAE and
. As shown in
Table 3, nitrogen predicted by hybrid BPNN obtains the best result for its MPAE, being the lowest, and
calculated by hybrid BPNN is the highest compared with other methods. In this research, the importance of MPAE outweighs that of the other two criteria, RMSE and
, since the numerical magnitude of each water quality parameter differs greatly. More data should be collected from the study area to thoroughly cover a wider numerical range for each water quality parameter so as to improve the prediction precision of water quality parameters. In general, the proposed hybrid BPNN model works effectively for most water quality parameters in the study area.
The ground ASD reflectance and numerical concentrations of water quality parameters were used as inputs for the proposed hybrid BPNN model to train the proposed model. UAV hyperspectral image data was transferred to ground ASD reflectance through Equations (2) and (3) in
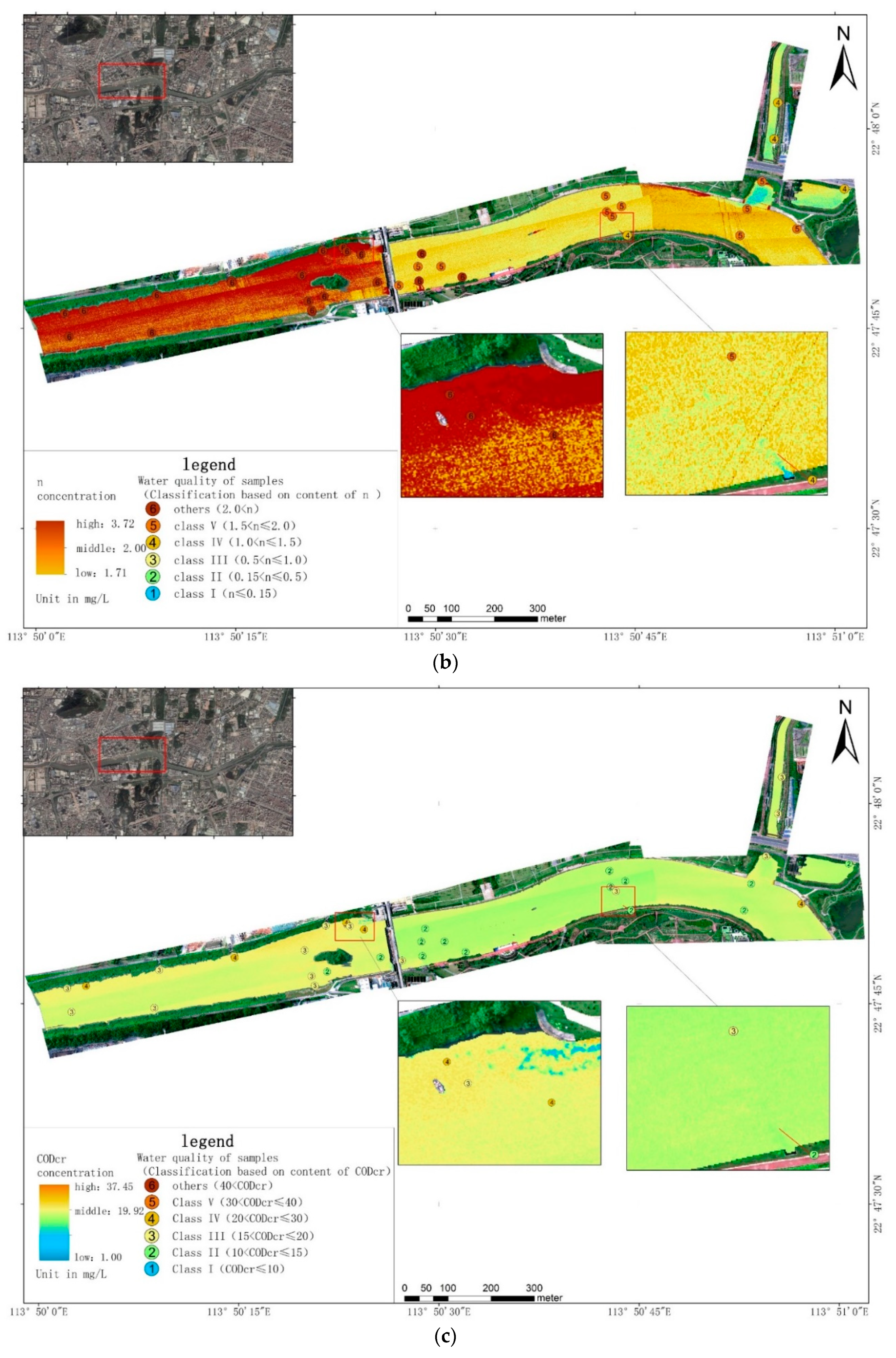
Section 3. Then, the transferred reflectance data from the UAV hyperspectral image can be transformed with eigenvectors, which can be used as inputs for the large-scale numerical prediction of water quality parameters. This study used UAV hyperspectral image data of the entire study area to calculate the concentration of each water quality parameter, as shown in
Figure 11, which not only describes the distribution of the content levels of water quality parameters, but categorizes the pollution levels into six levels based on the content levels of each water quality parameter, respectively. Additionally, the criteria of categorization levels conform to the criteria of classification on water quality from our supporting program, Shenzhen Intelligent River pilot program. However, due to restrictions in terms of the UAV flying height and UAV battery imposed by the local government, our UAV had to fly along the river several times, and we had to combine all hyperspectral images to cover the whole study area. Thus, more UAV flights must be implemented to cover the entire study area, since a single flight under these limitations only covers a fraction of the entire study area. The method of data collection by UAV is flexible and effective for scanning reflectance of target object. Combining all UAV hyperspectral images results in combining traces between images in each plot since water is actively flowing, which causes the content level of each water quality parameter to change over time. In this study, UAV has to take several air strips one by one.
Figure 11 delineates the resulting distribution of the concentration of water quality parameters at three wavelengths of 480, 550, and 670 nm for RGB color [
27]. In
Figure 11, the distribution of each water quality parameter can be observed through the change in the color of each plot, and thus local environment protection department can determine the source of pollution according to change in the content levels of each water quality parameter.
5. Discussion
In this study, RMSE, MPAE, and
are employed to assess whether the proposed method fits the data appropriately. This study aims to quantify the water quality parameters from a different and novel perspective and shows higher accuracy, interpretability, and computational efficiency with the hybrid Bayesian method, as mentioned in
Section 3. Some other methods [
12,
13,
14] predicting the content levels of water quality parameters calculate
based on predicted values that are linearly regressed from measured values rather than predicted values from their models, even though they have a relatively high
above 0.90. Some multiple piecewise regression methods [
10,
11] give lower RMSE and higher
, but they are not generalizable and stable, since
values obtained from their methods fluctuate from 0.65 to 0.95 unstably, depending on the type of water quality parameters. The method by Li et al. (2017) used some of the dominant wavelengths where the
value is less than 0.8 on average, but this method has less theoretical support and chance discovery plays a large part.
Furthermore, a semi-analytical method matrix inversion method using satellite spectral images as inputs to calculate
Chla by Campbell et al. [
11] provided changes in MPAE from 8% to 33%, which fluctuated unstably. A CNN regression method for the quantitative estimation of water quality parameters using hyperspectral reflectance bands as inputs to calculate
Chla gave an
of 0.73 [
14] in the training dataset, which randomly assigned 70% of the total dataset as the training dataset and 30% as the testing dataset. In their method, they used six parameters, each consisting of 86 bands from 400 nm to 800 nm, as their input bands, but they did not consider the large-scale calculation of
Chla effectively and cost-efficiently since their method only took single point calculation into account. Although these methods obtained relatively good results on their datasets, they did not implement concurrent sampling between ground sampling and satellite image collection, which might incur relatively high bias between training input and futuristic satellite image input for the large-scale calculation of distribution of water quality parameters. A comparison between our proposed method and other methods [
9,
11,
14] shows that our proposed method outperforms others with respect to calculation accuracy (details can be found in
Table 3).
Our proposed method is analogous to Bayesian method averaging (BMA), with variable and band selection based on hyperspectral imaging [
47]. The BMA method predicted
Chla, phosphorus, and nitrogen, with the best results yielding an
value over 0.8. It combined experimentally presumed prior and posterior distribution, and then employed a reversible jump Monte Carlo Markov Chain (RJ-MCMC) algorithm to draw random samples of the model as the transient parameters for iterating posterior distribution. Finally, the average of individual predictions in sampled model from the initial state to the current state was calculated by a mathematical equation. Additionally, they evaluated their proposed model through testing if the measured values had confidence intervals, with a significance level of 95% and a paired-
t test. The size of the training samples differed with the type of water quality parameters, ranging from 33 to 580, where two thirds of the total dataset worked as training dataset and the rest worked as the testing dataset. The prediction accuracy of their proposed model varied from 0.84 to 0.95 for
and from 0.54 mg/m
3 to 48.3 mg/L for RMSE depending on which water quality parameter was tested. In a sense, their statistical method for evaluation was not s precisely predicted and measured error-based method since predicted values from their study were not commonly compared with the exact measured values. However, their method was tested if the values were within the confidence interval for evaluate predictive accuracy. Furthermore, their selected bands, with no regard for the size of the dataset, varied with different water quality parameters, causing the computational time to vary considerably. Their BMA method had to be retrained every time new training data were added because one paramount step in BMA, the RJ-MCMC sampler, sampling difficult-to-obtain simulated values for each parameter based on the training dataset, was not able to cope with the accumulated dataset efficiently. Moreover, their band selection method did not consider a situation when they might face a larger dataset; in this case, they would have to re-choose the bands and re-train the model. All of the above studies did not consider medium interference between the satellite and water, which might result in inaccurate spectral measurements and ineffectiveness because medium interference causes higher bias from the real reflectance of water.
In
Figure 4, nitrogen and phosphorus may have absorption features in relation to reflectance, ranging from 800 nm to 900 nm, and may have a peak reflectance ranging from 400 nm to 600 nm [
27,
40,
41]. Thus,
Figure 4a,e have relatively high content levels of nitrogen and phosphorus. We took ten flights rather than one on the entire study area due to the restriction on UAV flying height imposed by the local government. All hyperspectral images combined from each flight are calculated to show the distribution of water quality parameters across the entire study area, as
Figure 11 shows. In
Figure 11, we can rationally infer that (a) has a higher concentration of phosphorus near the bank where many local inhabitants pour their living waste, such as washing detergent, remains of farm chemicals, and oil-based substances into the water [
48], which is similar to our calculated distribution. The accumulation of phosphorus near the bank is commonly higher than that in areas towards the center of the river. Those are quickly discharged from the bank into the water, causing the instant accumulation of phosphorus, which is carried by the flowing water downstream [
49]. Therefore, the aggregation of a high volume of phosphorus always happens near both sides of the bank and phosphorus is unable to move to the center of the river due to the discharge of phosphorus-containing objects and water working as a phosphorus carrier, moving phosphorus-containing objects downstream almost simultaneously. The concentration of phosphorus near the wastewater discharge outlet is higher than that in the neighborhood since water discharged there is mixed with different types of living wastewater. In contrast to the wastewater discharge outlet, the concentration of phosphorus is lower near the purified water discharge outlet. As shown in
Figure 11b, the dark red represents a high concentration of nitrogen, which has a similar distribution in
Figure 11e since nitrogen is of paramount importance in the synthesis of
Chla [
50]. The remains of laundry detergent and farm fertilizer are discharged into the river by fishermen and local inhabitants, resulting in an algal boom associated with high concentrations of
Chla. The distribution of concentrations of phosphorus can be analogous to that of nitrogen and
Chla for some areas along the bank, because nitrogen and phosphorus are vital and indispensable elements in the chemical synthesis of
Chla [
51,
52]. Accordingly, the excess of
Chla is associated with the high concentrations of nitrogen and phosphorus. As we observe in
Figure 11b,e, some perilous chemical materials such as protoporphyrinogen oxidase (Protox) from herbicide, and copper sulfate used in agriculture or plastic-made materials [
53,
54], are discharged from the bank of river on the right side of each plot, where the concentrations of nitrogen and of
Chla are lower than that on the left side of each plot. Protox is used as a herbicide in agriculture [
55] and copper sulfate [
56] is beneficial and useful for the agricultural cultivation of aquatic life because it is the main component of algaecides [
57] and pesticides used for the prevention of some diseases that commonly occur in aquatic life. Additionally, copper sulfate maintains the agricultural cultivation of aquatic life with regular dosage control [
58]. The concentrations of nitrogen and of
Chla from the wastewater discharge outlet are lower than those of the purified water discharge outlet in
Figure 11b,e. As shown
Figure 11c,d, BOD and COD have similar distributions in most areas. According to the previous research provided by the local environment protection department, algae overgrew in the river as large masses of BOD and COD were needed. BOD and COD have higher concentrations near the waste water discharge outlet, but lower concentrations near the purified water discharge outlet because some factories producing leather and paper discharge their industrial waste, including some oxygen-based organic and inorganic matters, into the river through the waste water discharge outlet [
59,
60]. The concentrations of phosphorus, nitrogen, COD, and
Chla are relatively low in the narrower upper watercourse than those in other parts, as shown in
Figure 11a,b,d,e, for there are less houses and factories, which have heavy odds in favor of discharging living waste and industrial waste into the river. However, the distribution in the concentration of BOD in
Figure 11c is different from that of other water quality parameters in the narrower upper watercourse, mainly because some aquafarms are located along the bank of the narrower upper watercourse where aquatic animals such as fish and plankton are cultivated. Therefore, the concentrations of phosphorus and nitrogen are accordingly lower in narrower upper watercourse since low concentrations phosphorus and nitrogen will restrain the growth of algae. With lower concentrations of phosphorus and nitrogen, algae are deprived of the necessary and essential substances to support their growth, resulting in lower concentrations of
Chla [
61]. Furthermore, the level of pollution on the left side of each plot with regard to the concentration of each water quality parameter is almost higher than that on the right side, owing to the fact that more factories and residence houses are located along the left bank in each plot. BOD and COD are calculated through the bands ranging from 450 nm to 780 nm [
4], which are covered in the range of bands in our research. Nitrogen corresponds to the spectrum ranging from 350 nm to 1100 nm [
62,
63], phosphorus saliently fluctuates at the spectrum ranging from 400 nm to 900 nm [
64], while
Chla experimentally responds to the spectrum ranging from 450 nm to 850 nm [
38,
65]. These water quality parameters are mostly covered within our wavelengths, ranging from 399.69 nm to 1001.08. The accuracy of the methods [
8,
9] in
Table 3 may be relatively low since these methods may not be applicable to some water quality parameters.
However, some limitations exist in this study, such as the limitation of the training data size and the pragmatic bias of the model of transferring UAV reflectance to ASD reflectance. In some other methods [
7,
8,
10,
11] with mathematical and experimental analysis, hundreds of samples were employed for the establishment and testing of models, and some water samples are simulated in the laboratory rather than using in situ collected samples. Our water samples are in situ samples, and two factors— the fact that samples are time consuming to collect and expensive to chemically analyze in labs—work heavily against the progress of our research. Additionally, it is hard to quantify water quality parameters based on low-value water reflectance, as the content level of each water quality parameter is comparatively low in Maozhou River. Therefore, the estimation of water quality parameters practically obtains weak signals. Moreover, the small range of content levels for the water quality parameters restrained the variation range of the calculated results, which might influence the calculation accuracy for other areas. The small dataset used to train the model restrained its performance to some extent. The high quality of obtained UAV hyperspectral data should be ensured in order to calculate each water quality parameter with a high accuracy. The featuring bands may not be fixed and deep experiments on the selection of input parameters can be implemented in the future. In accordance with the accumulation of data, our proposed method, hybrid BPNN, will be more generalized and adaptable to hyperspectral data from different areas.
The samples were collected from five different routes, covering the whole study area. Comparatively, the proposed hybrid BPNN model is able to gain better results, outperforming other models [
12,
13,
14] concerned with monitoring water quality parameters based on deep learning. According to previous studies [
12,
13,
14] on the retrieval of quantitative content levels of water quality parameters, pertinent methods for calculating water quality parameters were trained with larger masses of training data and then tested with less data. These methods are comparatively low cost, because the cost of collecting in situ samples is high. Additionally, these methods only work well when a small fraction of the testing data is engaged in testing the model’s performance. When comparing satellite-based hyperspectral remote sensing with other methods, including empirical [
7,
8], semi-analytical [
10,
11], and conventional artificial neural network [
12,
13,
14] methods, hyperspectral remote sensing based on UAV through the hybrid BPNN method is more effective because it takes less in situ samples to train the model and it shows a great performance. The results of this study shows that our proposed hybrid BPNN model outperforms other models discussed in
Section 4 with respect to
, RMSE, and MPAE on the same testing dataset, where
is over 0.94 and MPAE is less than 10% for all water quality parameters in our study. We do not pay much attention to RMSE, since the numerical magnitude of each water quality parameter differs considerably. The remote sensing methods in other studies are highly expensive, with the lengthy process of retrieving spectral data from a long distance, alongside interferences such as reflection, refraction, and a heterogeneous medium.
In this study, 35 samples were used to train the proposed model due to the constraints of financial support and the time limit. Meanwhile, 35 samples were used to test the model. The utilization of an equal sample size for training and testing models rarely obtains high accuracy and precision. Be that as it may, our proposed model still obtains better results in terms of mathematical and statistical criteria. Our proposed model focuses on the distribution of each parameter, which reduces the limitations of our prior knowledge and makes each parameter follow the practical distributions more flexibly and variationally in order to fit various data. Therefore, the hybrid BPNN model can be trained on less data to obtain greater results. Furthermore, our fitted model works well in our research area, but if different data are collected, our proposed method, hybrid BPNN, will fit other areas as well, since the weight parameters in the Bayesian neural network are sampled from statistical distributions. Thus, this step causes weights to change in order to reduce the loss by increasing ELBO and approximating the real distribution of parameters in hybrid BPNN with more training data employed [
37,
66,
67]. The UAV-transported hyperspectral imager is more cost effective and saves more time compared to satellite-based hyperspectral imagers, with less medium interference. However, satellite-based hyperspectral imagers can cover larger areas, meaning that the hyperspectral images will be high quality where no combining traces exist. Our research will continue, focusing on more hybrid structures of models for the effective assessment of water quality parameters.
6. Conclusions
In this study, the proposed method, hybrid BPNN, is trained on less data but obtains greater results, outperforming other models, as stated earlier, with respect to calculation accuracy, types of water quality parameters, and effectiveness. The proposed method takes featuring reflectance, which it selects through feature engineering, and transfers it from a transferring model, as mentioned in
Section 2, to be used as the as input to predict the concentrations of water quality parameters including phosphorus, nitrogen, COD, BOD, and
Chla.Furthermore, our proposed method combines concurrent ground sampling and UAV hyperspectral imaging to reduce the mathematical bias of hyperspectral reflectance and its corresponding content levels of water quality parameters, since the water quality parameters change due to the actively flowing river. Moreover, our proposed method is currently applied to monitor the water quality of Maozhou River, Shenzhen City, Guandong Province, China, based on hyperspectral image data. Thus, the locations of pollution sources can be located through the calculated results.
Further research can be done to reduce the time, labor, and financial cost. Cloud calculation stations can be established to enable a more immediate data exchange. Unmanned boats could be established, so that in situ water samples can be quickly collected and numerically measured for their content. UAV and unmanned boats could be linked through electronic signals to take samples with smaller time differences. The scanning width of a single flight could be wider in order to cover more area and the UAV battery volume could be increased. Thus, this would make it unnecessary to carry out several UAV flights to cover the target area. Moreover, if we carry out less UAV flights, there will be fewer image combining traces caused by the flowing water. Further research may need to consider the application of hybrid BPNN model to other water bodies, and more effort will be made to acquire more pertinent data to make the model structure deeper and more generalized to fit a wider variety of hyperspectral reflectance data.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}