Estimation of Canopy Gap Fraction from Terrestrial Laser Scanner Using an Angular Grid to Take Advantage of the Full Data Spatial Resolution


Abstract
:1. Introduction
2. Methods
2.1. Study Site
2.2. Algorithm to Calculate Angular Resolution
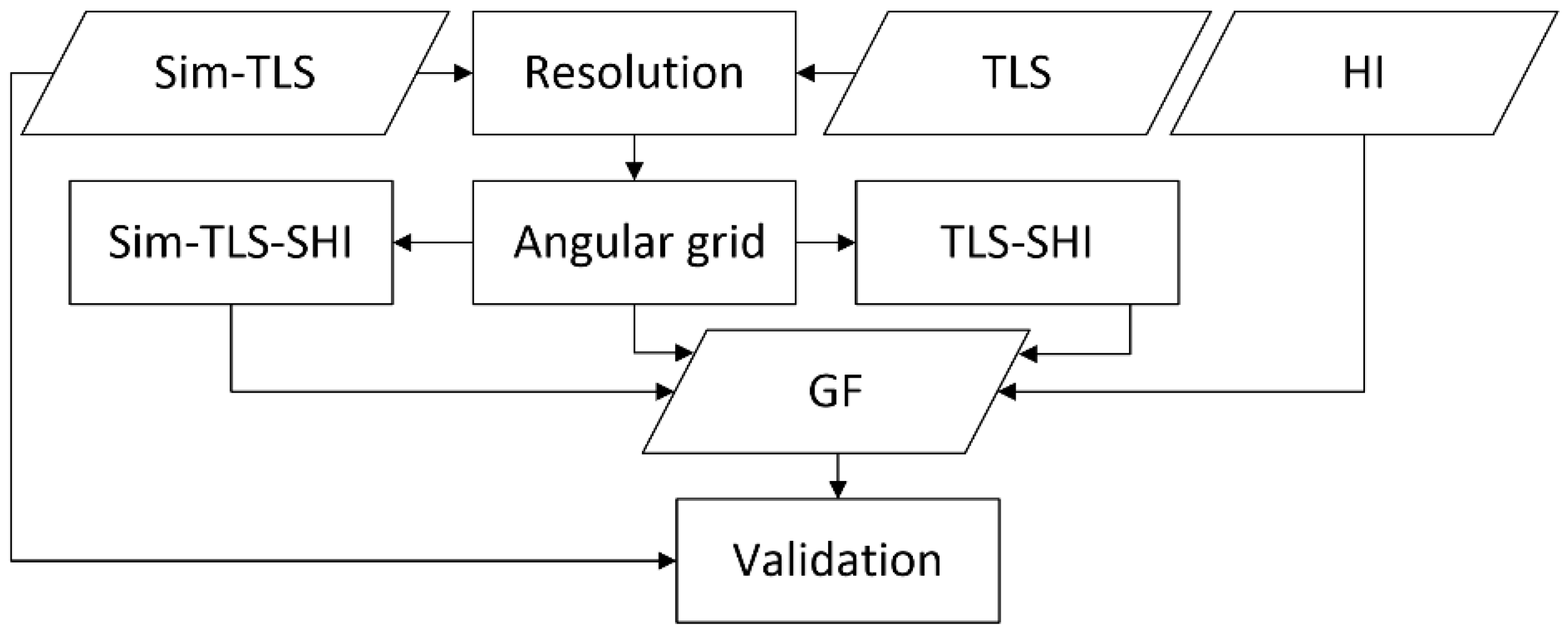
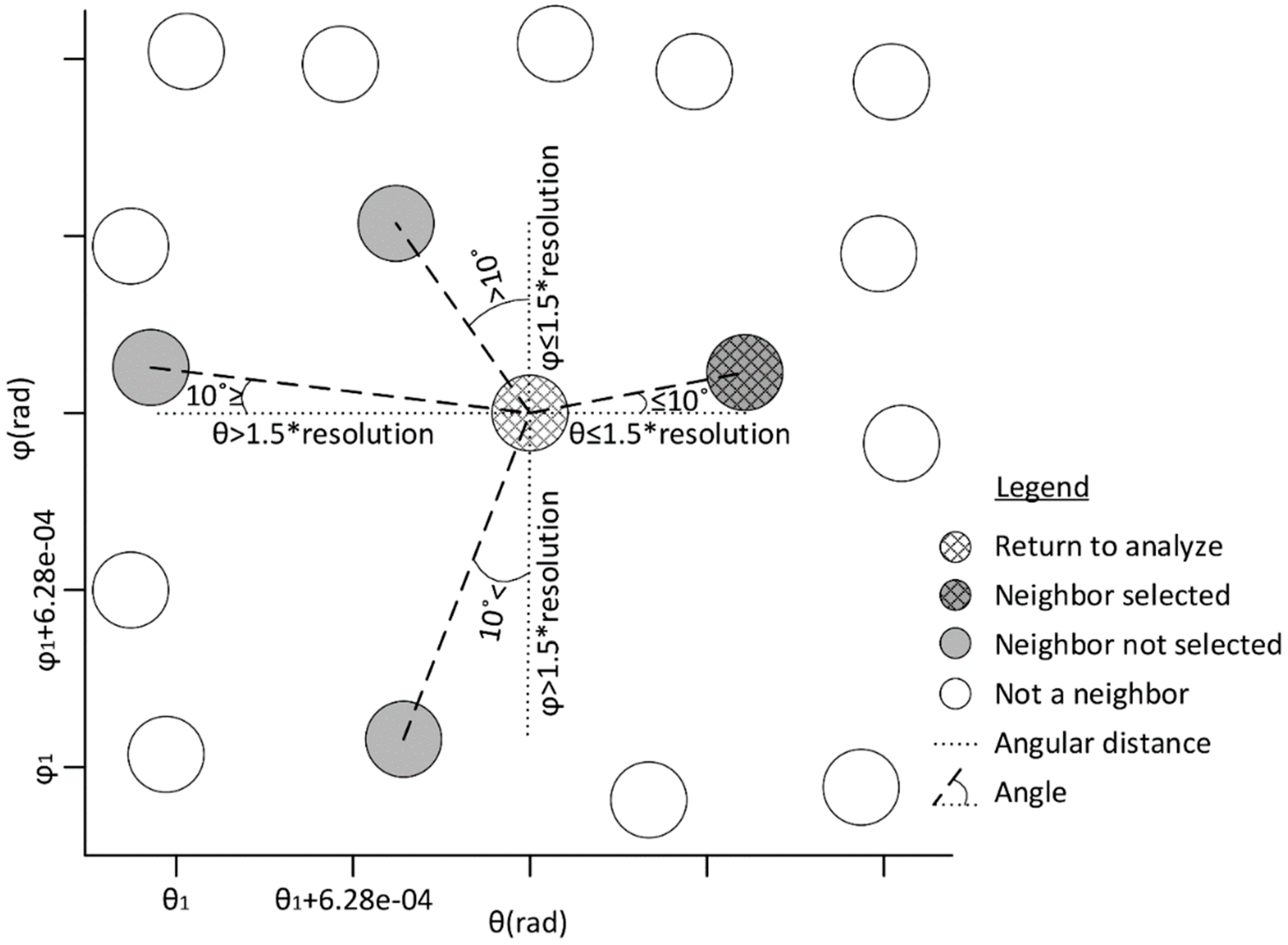
2.3. Angular Grid Algorithm to Calculate GF
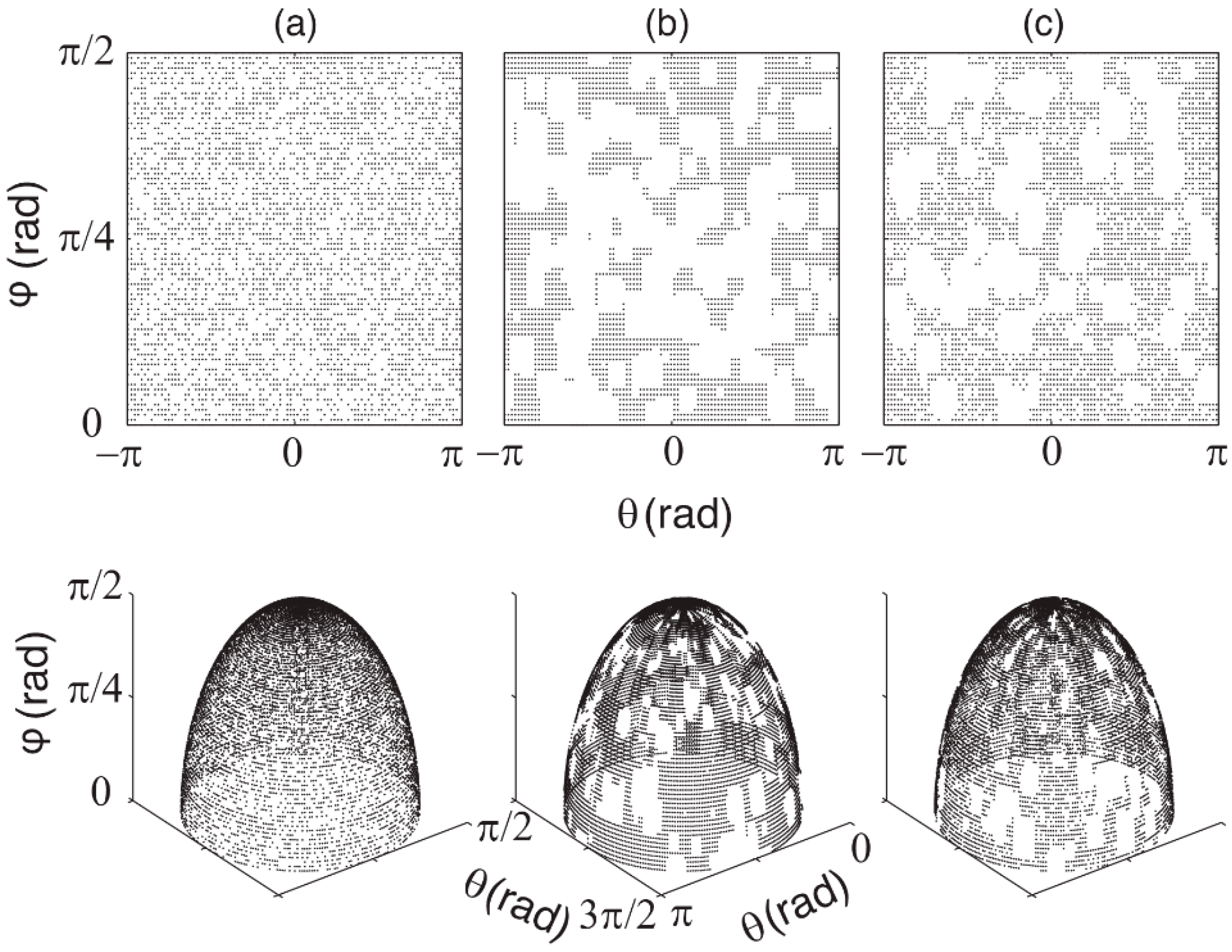
2.4. Angular Simulations to Test the Angular Grid Algorithm
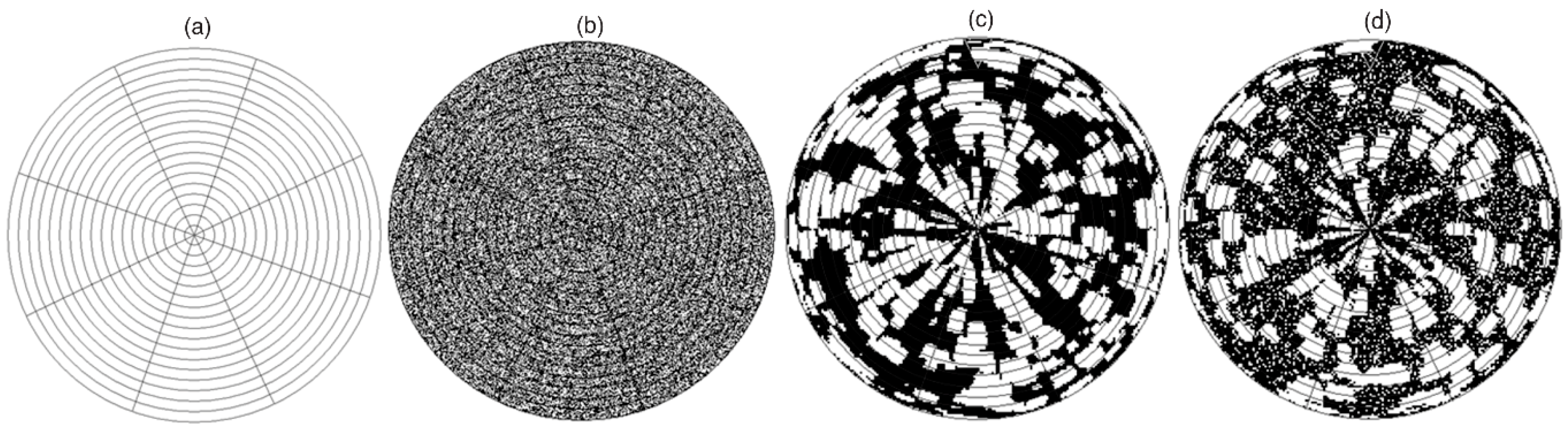
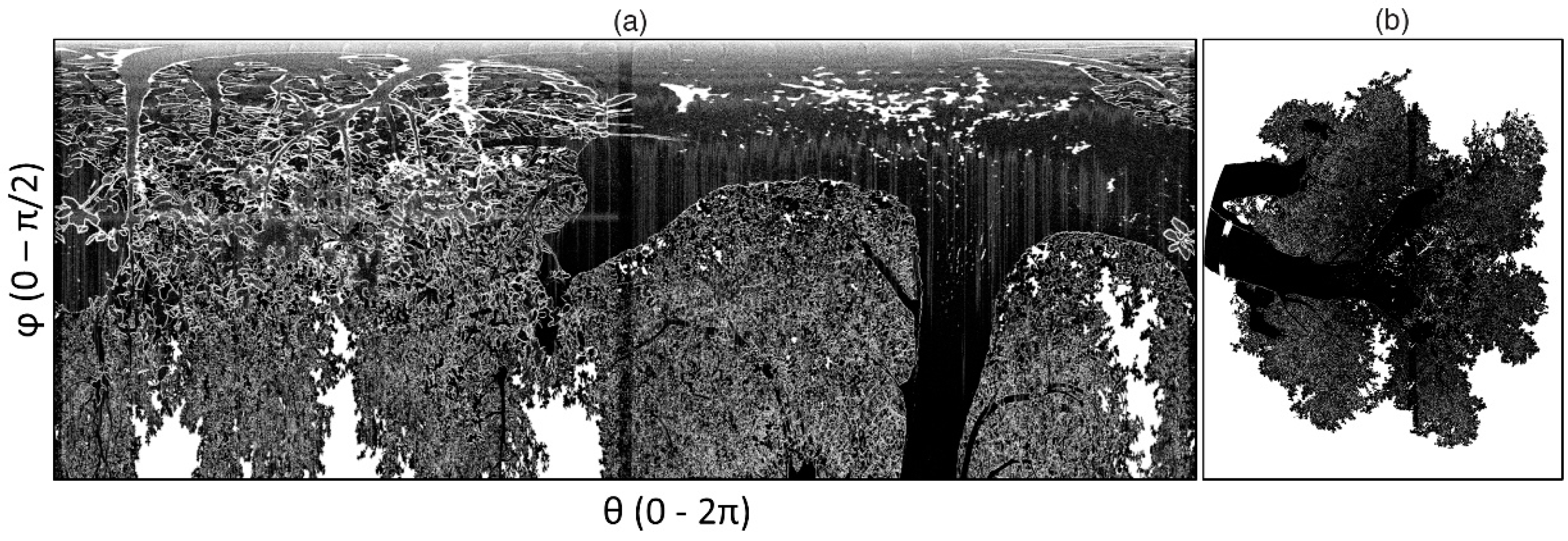
Simulated Hemispherical Images
2.5. Application of the Angular Grid Algorithm to Actual TLS Data
3. Results
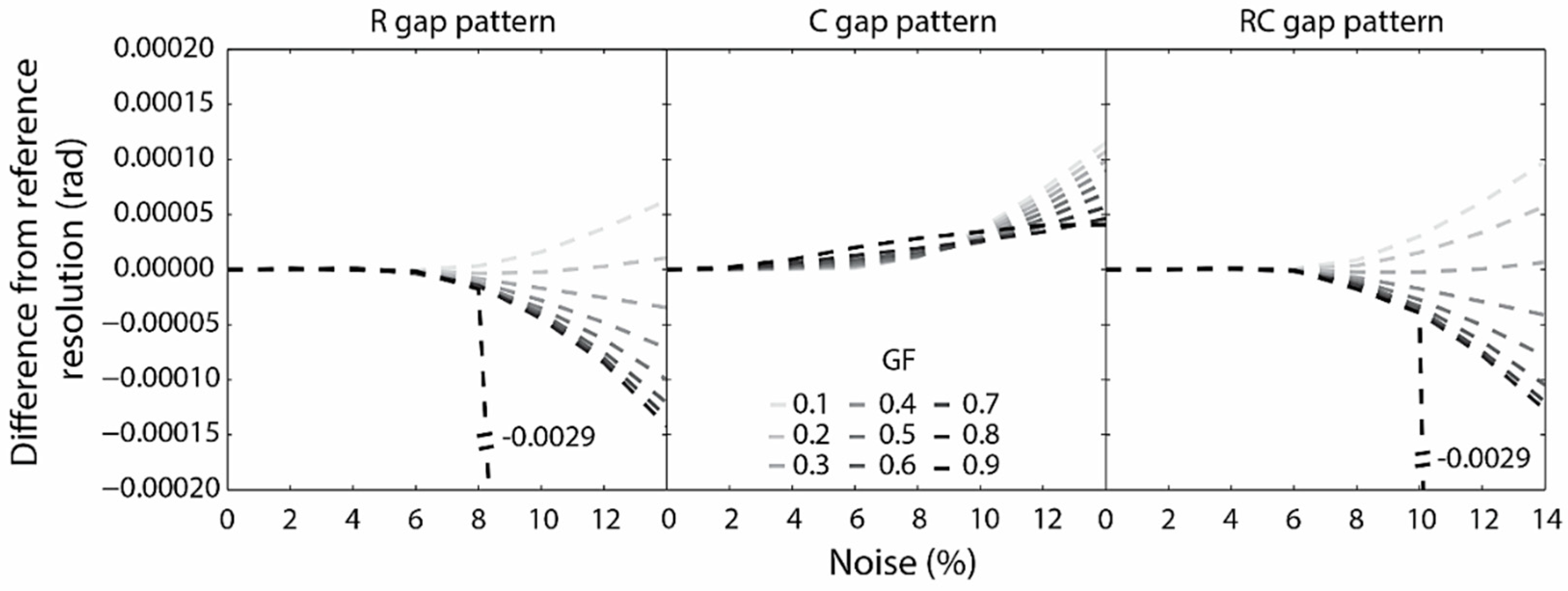
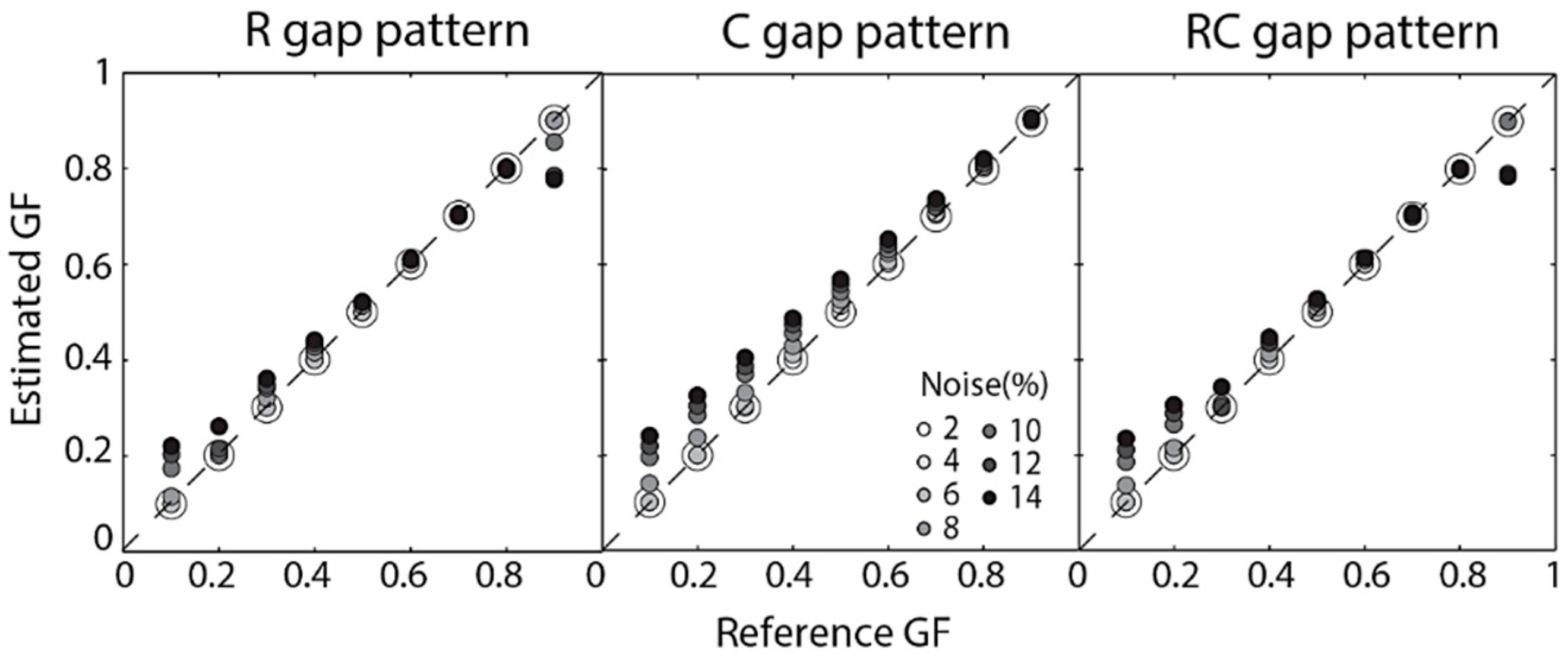
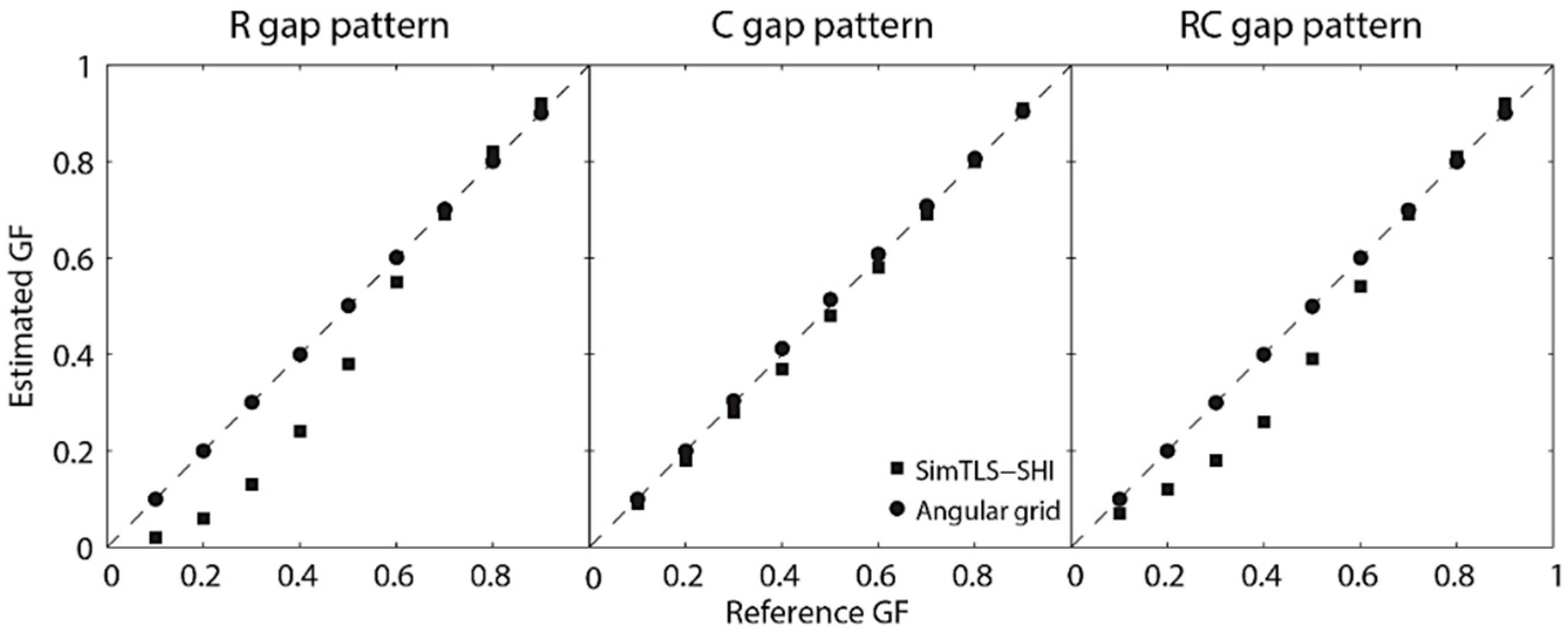
3.1. Simulated Angular Data: Angular Resolution, GF and Sim-TLS-SHI
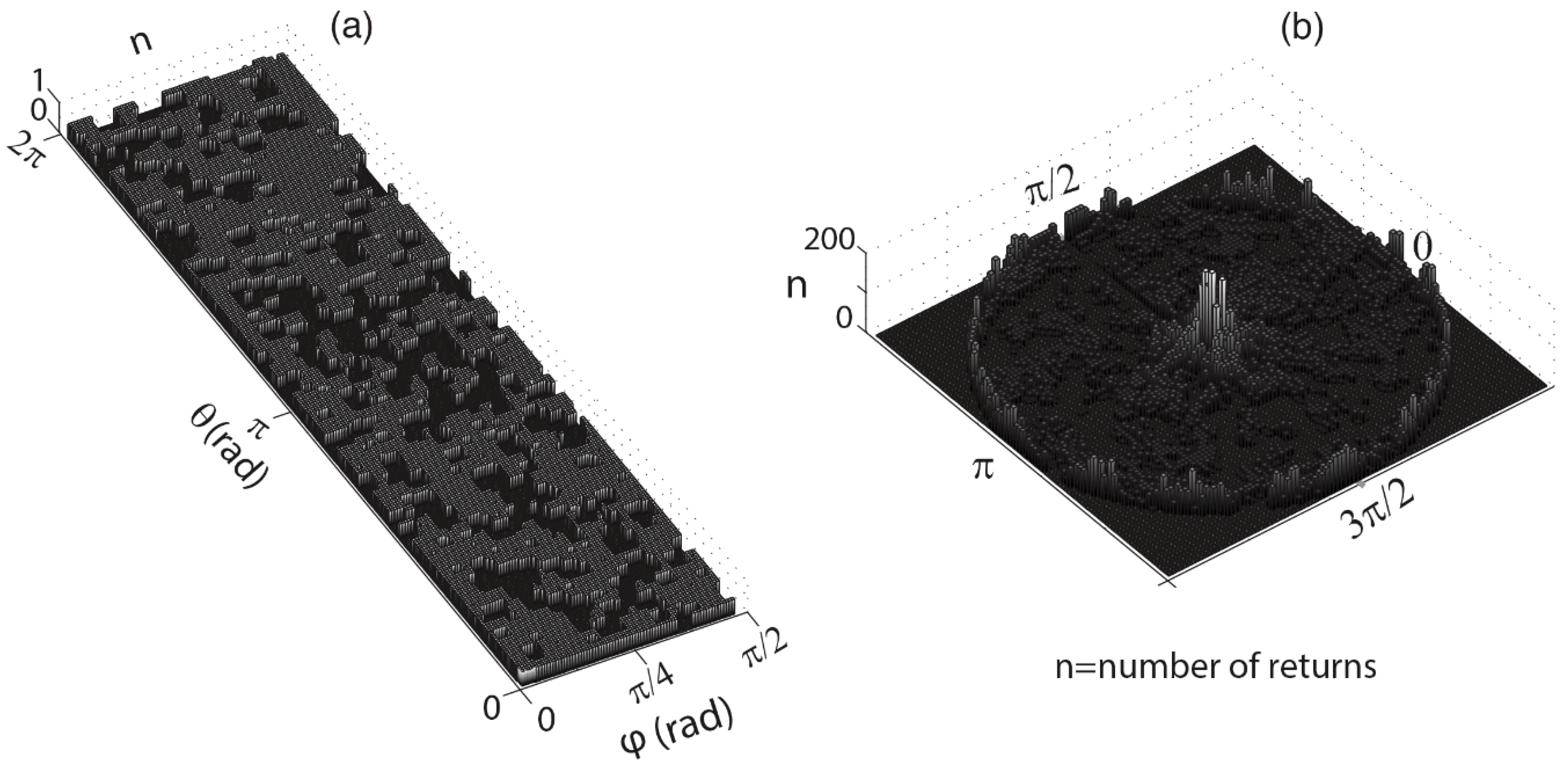
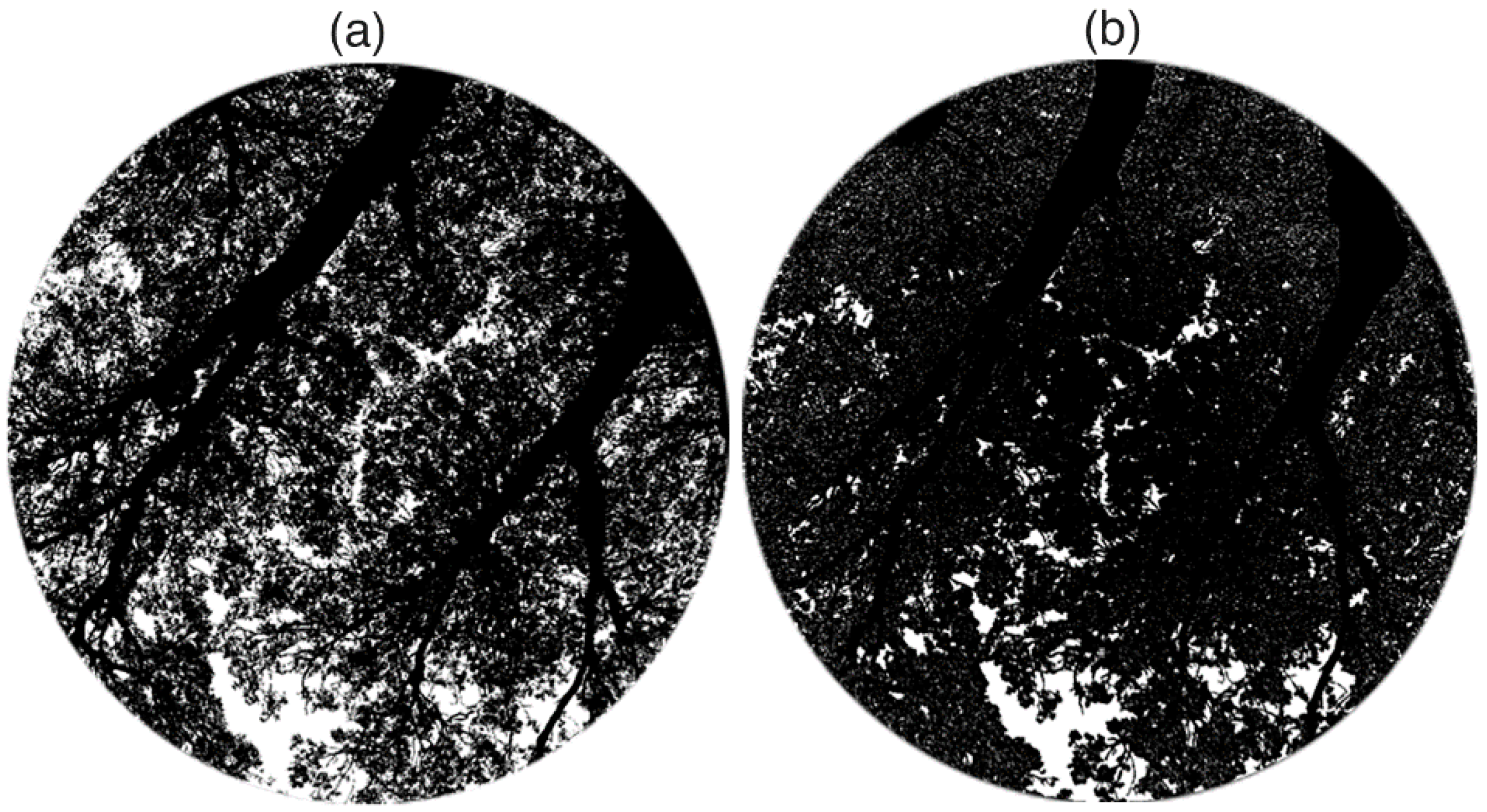
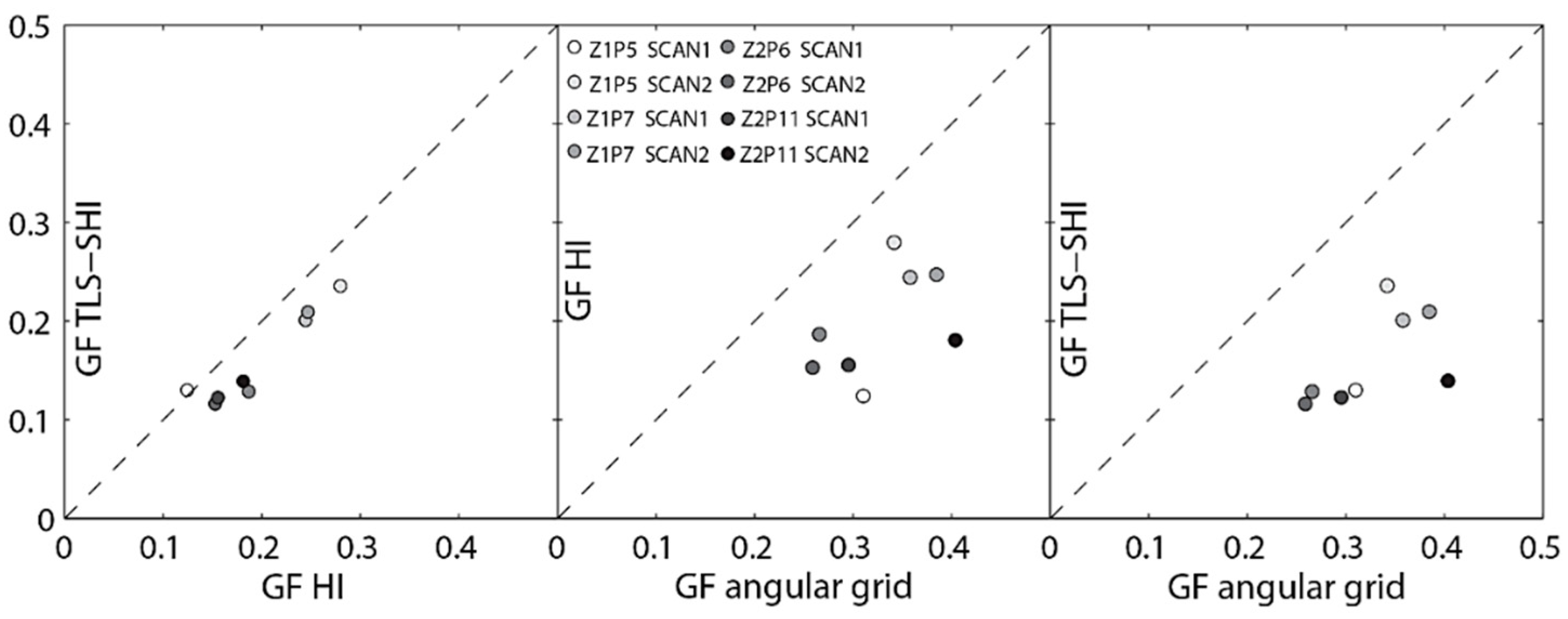
3.2. Actual TLS Angular Data: Angular Resolution, GF and TLS-SHI
4. Discussion
4.1. Angular Resolution and GF
4.2. Simulation of Hemispherical Images
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Soma, M.; Pimont, F.; Durrieu, S.; Dupuy, J.-L. Enhanced Measurements of Leaf Area Density with T-LiDAR: Evaluating and Calibrating the Effects of Vegetation Heterogeneity and Scanner Properties. Remote Sens. 2018, 10, 1580. [Google Scholar] [CrossRef] [Green Version]
- Vezy, R.; Christina, M.; Roupsard, O.; Nouvellon, Y.; Duursma, R.; Medlyn, B.E.; Soma, M.; Charbonnier, F.; Blitz-Frayret, C.; Stape, J.-L.; et al. Measuring and modelling energy partitioning in canopies of varying complexity using MAESPA model. Agric. For. Meteorol. 2018, 253, 203–217. [Google Scholar] [CrossRef]
- Dassot, M.; Constant, T.; Fournier, M. The use of terrestrial LiDAR technology in forest science: Application fields, benefits and challenges. Ann. For. Sci. 2011, 68, 959–974. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.M.; Black, T.A. Defining leaf area index for non-flat leaves. Plant Cell Environ. 1992, 15, 421–429. [Google Scholar] [CrossRef]
- Welles, J.M.; Cohen, S. Canopy structure measurement by gap fraction analysis using commercial instrumentation. J. Exp. Bot. 1996, 47, 1335–1342. [Google Scholar] [CrossRef]
- Jonckheere, I.; Fleck, S.; Nackaerts, K.; Muys, B.; Coppin, P.; Weiss, M.; Baret, F. Review of methods for in situ leaf area index determination: Part I. Theories, sensors and hemispherical photography. Agric. For. Meteorol. 2004, 121, 19–35. [Google Scholar] [CrossRef]
- Weiss, M.; Baret, F.; Smith, G.J.; Jonckheere, I.; Coppin, P. Review of methods for in situ leaf area index (LAI) determination: Part II. Estimation of LAI, errors and sampling. Agric. For. Meteorol. 2004, 121, 37–53. [Google Scholar] [CrossRef]
- Gonsamo, A.; Pellikka, P. Methodology comparison for slope correction in canopy leaf area index estimation using hemispherical photography. For. Ecol. Manag. 2008, 256, 749–759. [Google Scholar] [CrossRef]
- Leblanc, S.G.; Chen, J.M.; Fernandes, R.; Deering, D.W.; Conley, A. Methodology comparison for canopy structure parameters extraction from digital hemispherical photography in boreal forests. Agric. For. Meteorol. 2005, 129, 187–207. [Google Scholar] [CrossRef] [Green Version]
- Frazer, G.W.; Fournier, R.A.; Trofymow, J.; Hall, R.J. A comparison of digital and film fisheye photography for analysis of forest canopy structure and gap light transmission. Agric. For. Meteorol. 2001, 109, 249–263. [Google Scholar] [CrossRef]
- Ridler, T.; Calvard, S. Picture thresholding using an iterative selection method. IEEE Trans. Syst. Man Cybern. 1978, 8, 630–632. [Google Scholar] [CrossRef]
- Olsson, L.; Carlsson, K.; Grip, H.; Perttu, K. Evaluation of forest-canopy photographs with diode-array scanner OSIRIS. Can. J. For. Res. 1982, 12, 822–828. [Google Scholar] [CrossRef]
- Lang, M.; Kuusk, A.; Mõttus, M.; Rautiainen, M.; Nilson, T. Canopy gap fraction estimation from digital hemispherical images using sky radiance models and a linear conversion method. Agric. For. Meteorol. 2010, 150, 20–29. [Google Scholar] [CrossRef]
- Wehr, A.; Lohr, U. Airborne laser scanning—An introduction and overview. ISPRS J. Photogramm. Remote Sens. 1999, 54, 68–82. [Google Scholar] [CrossRef]
- Lichti, D.; Jamtsho, S. Angular resolution of terrestrial laser scanners. Photogramm. Rec. 2006, 21, 141–160. [Google Scholar] [CrossRef]
- Newnham, G.J.; Armston, J.D.; Calders, K.; Disney, M.I.; Lovell, J.L.; Schaaf, C.B.; Strahler, A.H.; Danson, F.M. Terrestrial laser scanning for plot-scale forest measurement. Curr. For. Rep. 2015, 1, 239–251. [Google Scholar] [CrossRef] [Green Version]
- Calders, K.; Newnham, G.; Burt, A.; Murphy, S.; Raumonen, P.; Herold, M.; Culvenor, D.; Avitabile, V.; Disney, M.; Armston, J.; et al. Nondestructive estimates of above-ground biomass using terrestrial laser scanning. Methods Ecol. Evol. 2014, 6, 198–208. [Google Scholar] [CrossRef]
- Li, Y.; Guo, Q.; Su, Y.; Tao, S.; Zhao, K.; Xu, G. Retrieving the gap fraction, element clumping index, and leaf area index of individual trees using single-scan data from a terrestrial laser scanner. ISPRS J. Photogramm. Remote Sens. 2017, 130, 308–316. [Google Scholar] [CrossRef]
- Pueschel, P.; Newnham, G.; Hill, J. Retrieval of Gap Fraction and Effective Plant Area Index from Phase-Shift Terrestrial Laser Scans. Remote Sens. 2014, 6, 2601–2627. [Google Scholar] [CrossRef] [Green Version]
- Cifuentes, R.; Van Der Zande, D.; Farifteh, J.; Salas-Eljatib, C.; Coppin, P. Effects of voxel size and sampling setup on the estimation of forest canopy gap fraction from terrestrial laser scanning data. Agric. For. Meteorol. 2014, 194, 230–240. [Google Scholar] [CrossRef]
- Hancock, S.; Essery, R.; Reid, T.; Carle, J.; Baxter, R.; Rutter, N.; Huntley, B. Characterising forest gap fraction with terrestrial lidar and photography: An examination of relative limitations. Agric. For. Meteorol. 2014, 189, 105–114. [Google Scholar] [CrossRef] [Green Version]
- Seidel, D.; Fleck, S.; Leuschner, C. Analyzing forest canopies with ground-based laser scanning: A comparison with hemispherical photography. Agric. For. Meteorol. 2012, 154, 1–8. [Google Scholar] [CrossRef]
- Zheng, G.; Moskal, L.M. Computational-Geometry-Based Retrieval of Effective Leaf Area Index Using Terrestrial Laser Scanning. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3958–3969. [Google Scholar] [CrossRef]
- Lovell, J.; Jupp, D.; Culvenor, D.S.; Coops, N.C. Using airborne and ground-based ranging lidar to measure canopy structure in Australian forests. Can. J. Remote Sens. 2003, 29, 607–622. [Google Scholar] [CrossRef]
- Wilkes, P.; Lau, A.; Disney, M.; Calders, K.; Burt, A.; De Tanago, J.G.; Bartholomeus, H.; Brede, B.; Herold, M. Data acquisition considerations for Terrestrial Laser Scanning of forest plots. Remote Sens. Environ. 2017, 196, 140–153. [Google Scholar] [CrossRef]
- Calders, K.; Verbesselt, J.; Bartholomeus, H.M.; Herold, M. Applying terrestrial LiDAR to derive gap fraction distribution time series during bud break. In Proceedings of the SilviLaser 2011, 11th international LiDAR Forest Applications Conference, Hobart, Australia, 16–20 October 2011. [Google Scholar]
- Danson, F.M.; Hetherington, D.; Koetz, B.; Morsdorf, F.; Allgöwer, B. Forest Canopy Gap Fraction From Terrestrial Laser Scanning. IEEE Geosci. Remote Sens. Lett. 2007, 4, 157–160. [Google Scholar] [CrossRef] [Green Version]
- Ramírez, A.; Armitage, R.; Danson, F.M. Testing the Application of Terrestrial Laser Scanning to Measure Forest Canopy Gap Fraction. Remote Sens. 2013, 5, 3037–3056. [Google Scholar] [CrossRef] [Green Version]
- Vaccari, S.; Van Leeuwen, M.; Calders, K.; Coops, N.C.; Herold, M. Bias in lidar-based canopy gap fraction estimates. Remote Sens. Lett. 2013, 4, 391–399. [Google Scholar] [CrossRef]
- Kuusk, A.; Pisek, J.; Lang, M.; Gruno, A. Estimation of Gap Fraction and Foliage Clumping in Forest Canopies. Remote Sens. 2018, 10, 1153. [Google Scholar] [CrossRef] [Green Version]
- Calders, K.; Schenkels, T.; Bartholomeus, H.; Armston, J.; Verbesselt, J.; Herold, M. Monitoring spring phenology with high temporal resolution terrestrial LiDAR measurements. Agric. For. Meteorol. 2015, 203, 158–168. [Google Scholar] [CrossRef]
- Portillo-Quintero, C.; Sánchez-Azofeifa, G.A.; Culvenor, D.S. Using VEGNET In-Situ Monitoring LiDAR (IML) to Capture Dynamics of Plant Area Index, Structure and Phenology in Aspen Parkland Forests in Alberta, Canada. Forests 2014, 5, 1053–1068. [Google Scholar] [CrossRef]
- Canham, C.; Denslow, J.S.; Platt, W.J.; Runkle, J.R.; Spies, T.A.; White, P.S. Light regimes beneath closed canopies and tree-fall gaps in temperate and tropical forests. Can. J. For. Res. 1990, 20, 620–631. [Google Scholar] [CrossRef]
- Hu, L.; Gong, Z.; Li, J.; Zhu, J. Estimation of canopy gap size and gap shape using a hemispherical photograph. Trees 2009, 23, 1101–1108. [Google Scholar] [CrossRef]
- Gonsamo, A.; Walter, J.-M.N.; Pellikka, P. Sampling gap fraction and size for estimating leaf area and clumping indices from hemispherical photographs. Can. J. For. Res. 2010, 40, 1588–1603. [Google Scholar] [CrossRef]
- Moorthy, I.; Miller, J.R.; Jimenez-Berni, J.A.; Zarco-Tejada, P.J.; Hu, B.; Chen, J. Field characterization of olive (Olea europaea L.) tree crown architecture using terrestrial laser scanning data. Agric. For. Meteorol. 2011, 151, 204–214. [Google Scholar] [CrossRef]
- Kremen, T.; Koska, B.; Pospıšil, J. Verification of laser scanning systems quality. In Proceedings of the XXIII FIG Congress, Munich, Germany, 8–13 October 2006; pp. 1–16. [Google Scholar]
- Reshetyuk, Y. Calibration of Terrestrial Laser Scanners Callidus 1.1, Leica Hds 3000 And Leica Hds 2500. Surv. Rev. 2006, 38, 703–713. [Google Scholar] [CrossRef]
- Rivas Martínez, S.; Gandullo, J.M. Memoria del Mapa de Series de Vegetación de España: 1: 400.000; ICONA: Madrid, Spain, 1987. [Google Scholar]
- Luo, Y.; El-Madany, T.S.; Filippa, G.; Ma, X.; Ahrens, B.; Carrara, A.; Gonzalez-Cascon, R.; Cremonese, E.; Galvagno, M.; Hammer, T.W.; et al. Using Near-Infrared-Enabled Digital Repeat Photography to Track Structural and Physiological Phenology in Mediterranean Tree–Grass Ecosystems. Remote Sens. 2018, 10, 1293. [Google Scholar] [CrossRef] [Green Version]
- Moreno, G.; Pulido, F.J. The Functioning, Management and Persistence of Dehesas. In Agroforestry in Europe; Rigueiro-Rodróguez, A., McAdam, J., Mosquera-Losada, M.R., Eds.; Springer: Dordrecht, The Netherlands, 2008; pp. 127–160. [Google Scholar] [CrossRef]
- El-Madany, T.S.; Reichstein, M.; Perez-Priego, O.; Carrara, A.; Moreno, G.; Martín, M.P.; Pacheco-Labrador, J.; Wohlfahrt, G.; Nieto, H.; Weber, U.; et al. Drivers of spatio-temporal variability of carbon dioxide and energy fluxes in a Mediterranean savanna ecosystem. Agric. For. Meteorol. 2018, 262, 258–278. [Google Scholar] [CrossRef]
- Lichti, D.D. A resolution measure for terrestrial laser scanners. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 34, 6. [Google Scholar]
- Hollander, M.; Wolfe, D.A. Nonparametric Statistical Methods, 2nd ed.; John Wiley and Sons: New York, NY, USA, 1999. [Google Scholar]
- Bréda, N. Ground-based measurements of leaf area index: A review of methods, instruments and current controversies. J. Exp. Bot. 2003, 54, 2403–2417. [Google Scholar] [CrossRef]
- Lang, A. Estimation of leaf area index from transmission of direct sunlight in discontinuous canopies. Agric. For. Meteorol. 1986, 37, 229–243. [Google Scholar] [CrossRef]
- Zhen, Z.; Wuming, Z.; Ling, Z.; Jmg, Z. Research on different slicing methods of acquiring LAI from terrestrial laser scanner data. In Proceedings of the 2011 IEEE International Conference on Spatial Data Mining and Geographical Knowledge Services (ICSDM), Fuzhou, China, 29 June–1 July 2011; pp. 295–299. [Google Scholar]
- García, M.; Gajardo, J.; Riaño, D.; Zhao, K.; Martín, M.P.; Ustin, S. Canopy clumping appraisal using terrestrial and airborne laser scanning. Remote Sens. Environ. 2015, 161, 78–88. [Google Scholar] [CrossRef]
- Zhao, F.; Yang, X.; Schull, M.A.; Román, M.O.; Yao, T.; Wang, Z.; Zhang, Q.; Jupp, D.; Lovell, J.; Culvenor, D.S.; et al. Measuring effective leaf area index, foliage profile, and stand height in New England forest stands using a full-waveform ground-based lidar. Remote Sens. Environ. 2011, 115, 2954–2964. [Google Scholar] [CrossRef]
- Jonckheere, I.; Nackaerts, K.; Muys, B.; Coppin, P. Assessment of automatic gap fraction estimation of forests from digital hemispherical photography. Agric. For. Meteorol. 2005, 132, 96–114. [Google Scholar] [CrossRef]
- Wehr, A. LiDAR: Airborne and terrestrial sensors. In Advances in Photogrammetry, Remote Sensing and Spatial Information Sciences: 2008 ISPRS Congress Book; Li, Z., Chen, J., Baltsavias, E., Eds.; CRC Press: Leiden, The Netherlands, 2008; Volume 7, pp. 73–84. [Google Scholar]
- Balduzzi, M.A.; Van Der Zande, D.; Stuckens, J.; Verstraeten, W.W.; Coppin, P. The Properties of Terrestrial Laser System Intensity for Measuring Leaf Geometries: A Case Study with Conference Pear Trees (Pyrus communis). Sensors 2011, 11, 1657–1681. [Google Scholar] [CrossRef]
- Van Der Zande, D.; Stuckens, J.; Verstraeten, W.W.; Mereu, S.; Muys, B.; Coppin, P. 3D modeling of light interception in heterogeneous forest canopies using ground-based LiDAR data. Int. J. Appl. Earth Obs. GeoInf. 2011, 13, 792–800. [Google Scholar] [CrossRef]
- Maling, D.H. Coordinate Systems and Map Projections, 2nd ed.; Pergamon Press: Oxford, UK, 1992. [Google Scholar]
- Kuusk, A. Specular reflection in the signal of LAI-2000 plant canopy analyzer. Agric. For. Meteorol. 2016, 221, 242–247. [Google Scholar] [CrossRef]
- Danson, F.M.; Armitage, R.P.; Bandugula, V.; Ramirez, F.A.; Tate, N.J.; Tansey, K.J.; Tegzes, T. Terrestrial laser scanners to measure forest canopy gap fraction. In Proceedings of the SilviLaser, Edinburgh, UK, 17–19 September 2008; pp. 335–341. [Google Scholar]
- Riaño, D.; Valladares, F.; Condés, S.; Chuvieco, E. Estimation of leaf area index and covered ground from airborne laser scanner (Lidar) in two contrasting forests. Agric. For. Meteorol. 2004, 124, 269–275. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Terrestrial Laser Scanner (HDS-6000) | Photographic camera (EOS 400D) |
|---|---|
| Instrument type: Phase—shift Laser Class: Class 3R (IEC EN60825-1) Laser wavelength: 400–700 nm Scanning range: 80 m Horizontal scanning range: 360° Vertical scanning range: 310° Size of the laser beam: 3 mm at exit + 0.22 mrad divergence Accuracy of range: <5 mm up to 50 m Laser rate: 500,000 points/sec Scanning optics: Vertically rotating mirror on horizontally rotating base | Resolution: 10 megapixels Sensor type: CMOS Sensor size: APS-C (1.6×) Maximum imagen resolution: 3888 × 2592 Minimum native ISO: 100 Maximum native ISO: 1600 |
| GF | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | |
|---|---|---|---|---|---|---|---|---|---|---|
| Noise | ||||||||||
| 2% | () | () | () | () | () | () | () | () | () | |
| 4% | () | () | () | () | () | () | () | () | () | |
| 6% | () | () | () | (*) | (*) | (*) | (*) | (*) | () | |
| 8% | (*) | (*) | (*) | (*) | (*) | (*) | (*) | (*) | (*) | |
| 10% | (*) | (*) | (*) | (*) | (*) | (*) | (*) | (*) | (*) | |
| 12% | (*) | (*) | (*) | (*) | (*) | (*) | (*) | (*) | (*) | |
| 14% | (*) | (*) | (*) | (*) | (*) | (*) | (*) | (*) | (*) | |
| Tree ID | Resolution θ (rad) | Noise θ (%) | Resolution ϕ (rad) | Noise ϕ (%) | GF |
|---|---|---|---|---|---|
| Z1P5_SCAN1 | 6.28 × 10−4 | 6.11 | 6.28 × 10−4 | 2.90 | 0.31 |
| Z1P5_SCAN2 | 6.28 × 10−4 | 5.80 | 6.28 × 10−4 | 3.12 | 0.34 |
| Z1P7_SCAN1 | 6.28 × 10−4 | 5.74 | 6.28 × 10−4 | 2.58 | 0.36 |
| Z1P7_SCAN2 | 6.28 × 10−4 | 6.31 | 6.28 × 10−4 | 3.36 | 0.38 |
| Z2P6_SCAN1 | 6.28 × 10−4 | 5.29 | 6.28 × 10−4 | 3.01 | 0.27 |
| Z2P6_SCAN2 | 6.28 × 10−4 | 5.68 | 6.28 × 10−4 | 2.85 | 0.26 |
| Z2P11_SCAN1 | 6.28 × 10−4 | 5.45 | 6.28 × 10−4 | 3.06 | 0.30 |
| Z2P11_SCAN2 | 6.28 × 10−4 | 5.76 | 6.28 × 10−4 | 4.46 | 0.40 |
| AVERAGE | 6.28 × 10−4 | 5.77 | 6.28 × 10−4 | 3.17 | 0.33 |
| Trunk ID | Resolution θ (rad) | Noise θ (%) | Resolution ϕ (rad) | Noise ϕ (%) |
|---|---|---|---|---|
| Z1P5_SCAN1 | 6.27 × 10−4 | 4.43 | 6.29 × 10−4 | 1.29 |
| Z1P5_SCAN2 | 6.28 × 10−4 | 4.22 | 6.29 × 10−4 | 1.18 |
| Z1P7_SCAN1 | 6.27 × 10−4 | 5.07 | 6.28 × 10−4 | 1.29 |
| Z1P7_SCAN2 | 6.28 × 10−4 | 4.99 | 6.28 × 10−4 | 1.27 |
| Z2P6_SCAN1 | 6.28 × 10−4 | 4.11 | 6.29 × 10−4 | 1.24 |
| Z2P6_SCAN2 | 6.28 × 10−4 | 4.63 | 6.28 × 10−4 | 1.27 |
| Z2P11_SCAN1 | 6.27 × 10−4 | 3.57 | 6.29 × 10−4 | 1.53 |
| Z2P11_SCAN2 | 6.28 × 10−4 | 4.39 | 6.28 × 10−4 | 1.11 |
| AVERAGE | 6.28 × 10−4 | 4.43 | 6.28 × 10−4 | 1.27 |
| Tree ID | Slice ϕ (°) | Resolution θ (rad) | Noise θ (%) | Resolution ϕ (rad) | Noise ϕ (%) |
|---|---|---|---|---|---|
| Z1P5_SCAN1 | 0–6 | 6.76 × 10−4 | 19.05 | 6.27 × 10−4 | 3.18 |
| Z1P5_SCAN2 | 0–3 | 6.53 × 10−4 | 17.97 | 6.27 × 10−4 | 3.05 |
| Z1P7_SCAN1 | 0–2 | 6.78 × 10−4 | 19.62 | 6.27 × 10−4 | 2.99 |
| Z1P7_SCAN2 | 0–3 | 6.61 × 10−4 | 19.10 | 6.27 × 10−4 | 3.01 |
| Z2P6_SCAN1 | 0–3 | 6.29 × 10−4 | 13.87 | 6.27 × 10−4 | 3.02 |
| Z2P6_SCAN2 | 0–2 | 6.43 × 10−4 | 17.33 | 6.27 × 10−4 | 2.75 |
| Z2P11_SCAN1 | 0–2 | 6.61 × 10−4 | 19.55 | 6.27 × 10−4 | 3.13 |
| Z2P11_SCAN2 | 0–3 | 6.46 × 10−4 | 18.04 | 6.27 × 10−4 | 2.96 |
| AVERAGE | 6.56 × 10−4 | 18.07 | 6.27 × 10−4 | 3.01 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gajardo, J.; Riaño, D.; García, M.; Salas, J.; Martín, M.P. Estimation of Canopy Gap Fraction from Terrestrial Laser Scanner Using an Angular Grid to Take Advantage of the Full Data Spatial Resolution. Remote Sens. 2020, 12, 1596. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12101596
Gajardo J, Riaño D, García M, Salas J, Martín MP. Estimation of Canopy Gap Fraction from Terrestrial Laser Scanner Using an Angular Grid to Take Advantage of the Full Data Spatial Resolution. Remote Sensing. 2020; 12(10):1596. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12101596
Chicago/Turabian StyleGajardo, John, David Riaño, Mariano García, Javier Salas, and M. Pilar Martín. 2020. "Estimation of Canopy Gap Fraction from Terrestrial Laser Scanner Using an Angular Grid to Take Advantage of the Full Data Spatial Resolution" Remote Sensing 12, no. 10: 1596. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12101596