Reliability and Uncertainties of the Analysis of an Unstable Rock Slope Performed on RPAS Digital Outcrop Models: The Case of the Gallivaggio Landslide (Western Alps, Italy)



Abstract
:
1. Introduction
- A 3D Direct-Georeferenced model (DOMs) was developed during the emergency, before the rockfall, in a relatively short time, without measuring Ground Control Points (GCPs), but using only the positions of the photographs registered by the RPAS onboard GPS;
- the stability analysis performed on this DOM defined the fracture network affecting the slope, the potential sliding surfaces, the possible failure mechanism and the volume of rock possibly involved in the landslide;
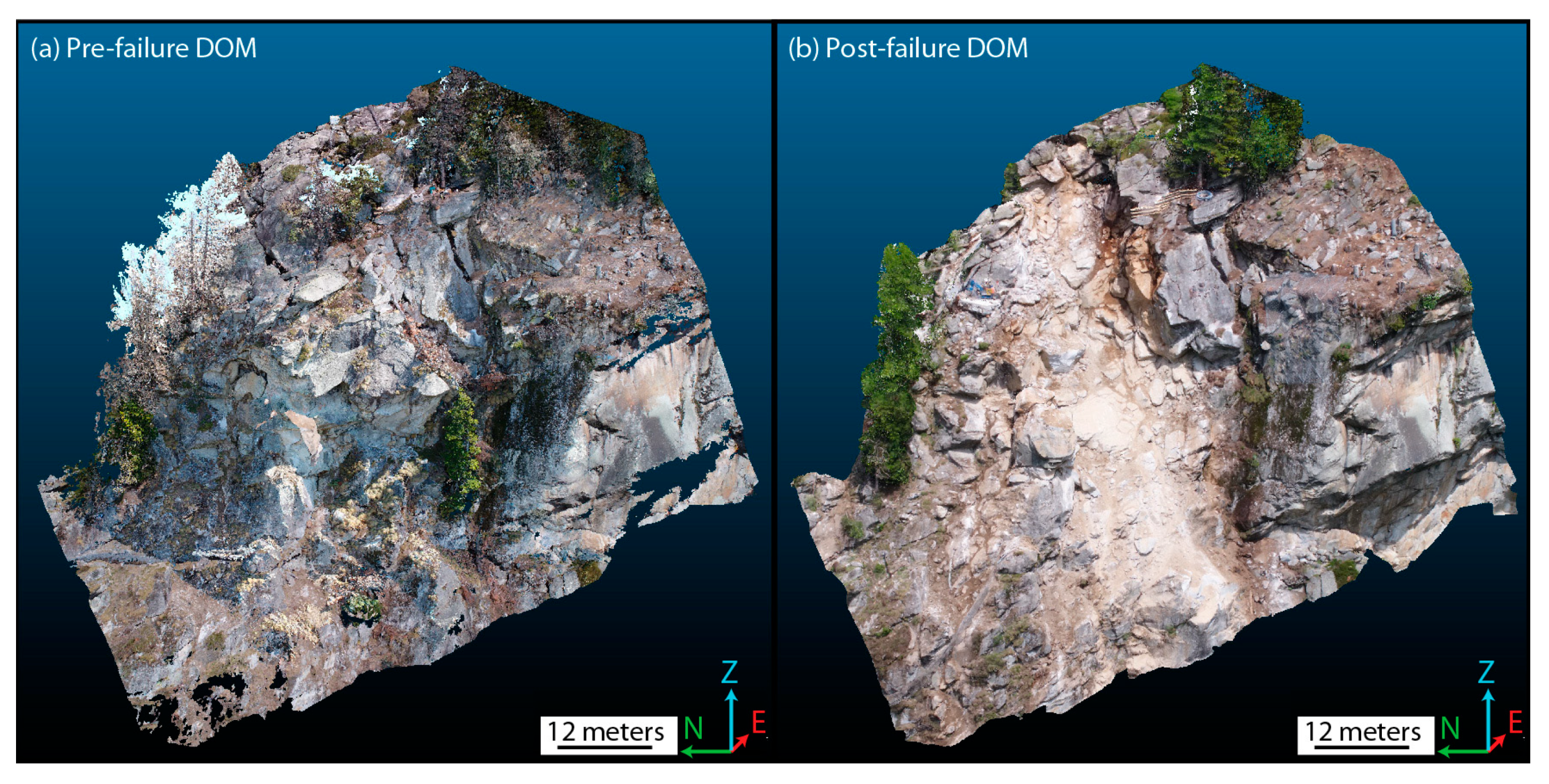
- after the landslide of May 29th, 2018 a second emergency photogrammetric survey was realized and a post-landslide Direct-Georeferenced DOM was realized with which the mode of failure and the volume of rock involved were verified;
- 30 GCPs were successively measured in the field by a laser reflector-less total station and the pre- and post-landslide photogrammetric surveys were used to realize two new GCP-georeferenced models by which the accuracy of the preceding analyses and in particular the volume estimation of the landslide was checked.
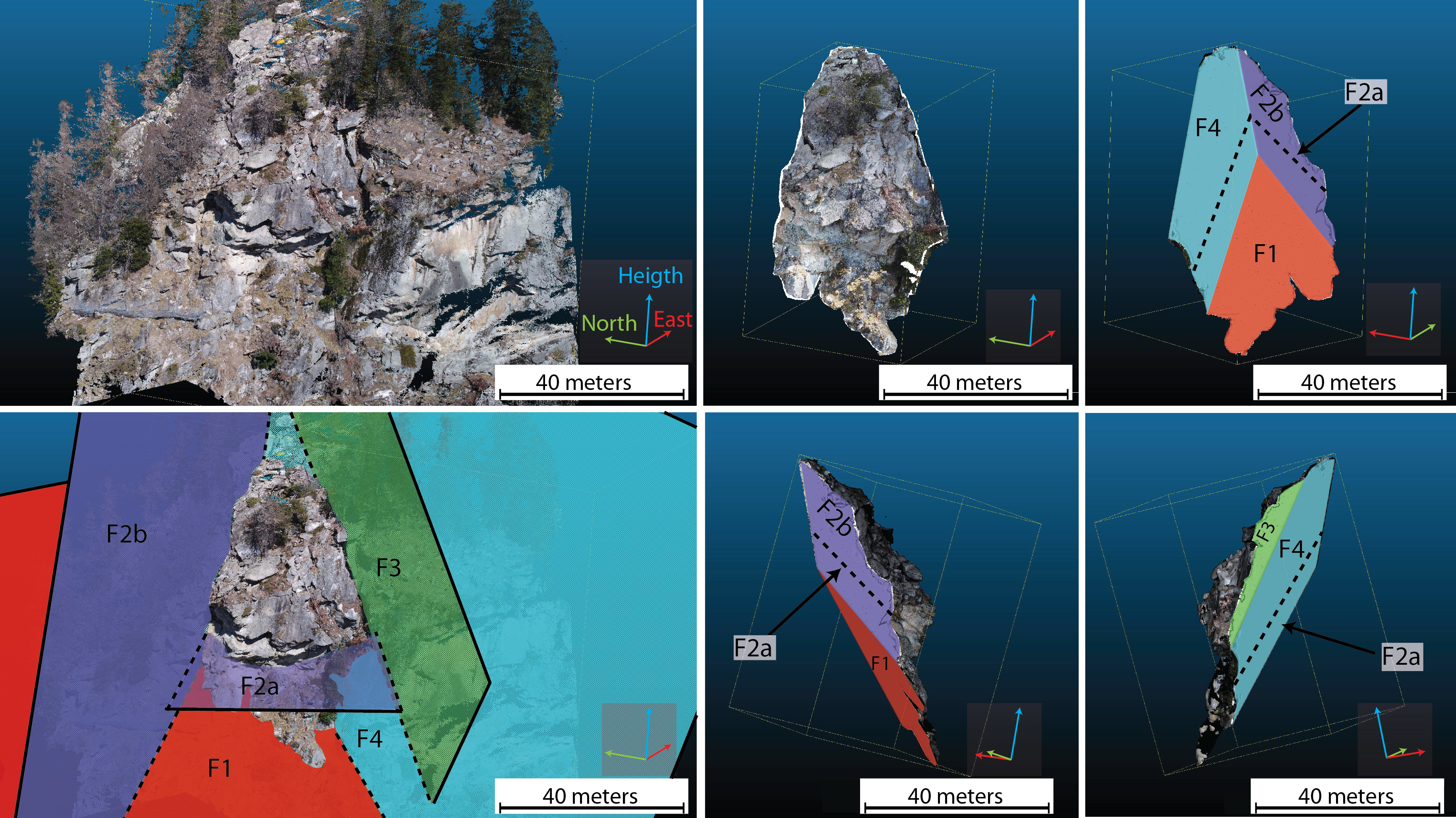
2. Site Description
2.1. Geological and Geomorphological Setting
2.2. Rock Slope and Slope Toe Area
2.3. Evolution of the 29th May 2018 Failure
3. Methodology
3.1. Digital Photogrammetric Survey
3.2. Digital Outcrop Model Development
- (1)
- Alignment of images using their full resolution and their orientation using the GNSS/IMU-information recorded by the RPAS onboard GPS or the GCPs position measured in the field by a total station;
- (2)
- dense point cloud reconstruction using the high-quality setting of Photoscan (half of the image resolution);
- (3)
- generation of the textured mesh using the dense cloud and the high face count suggested by Photoscan© and the generic mapping and the mosaic blending modes for creating 20 texture files of 4096 × 4096 pixels.
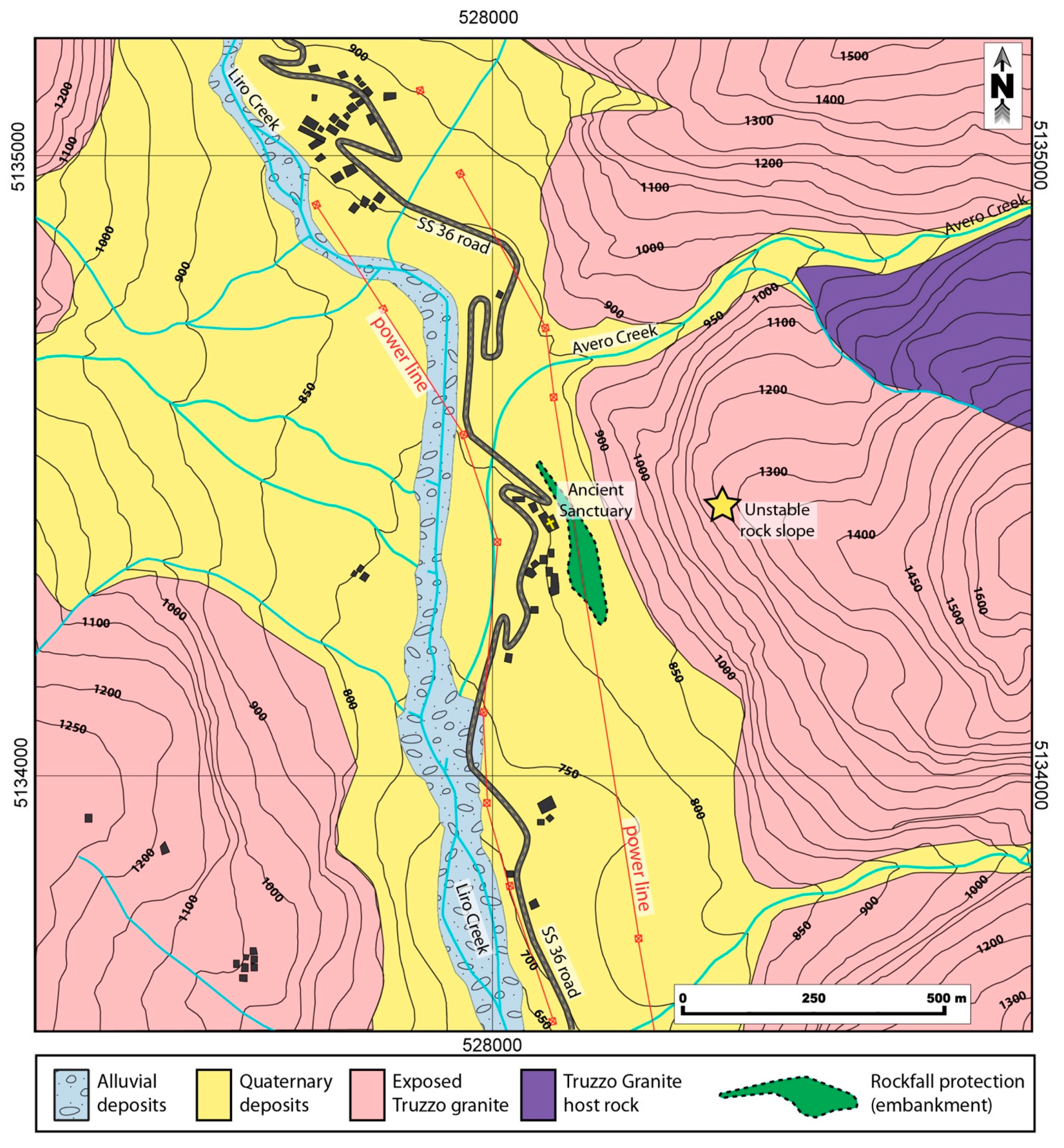
3.3. Digital Outcrop Models Analysis
- (i)
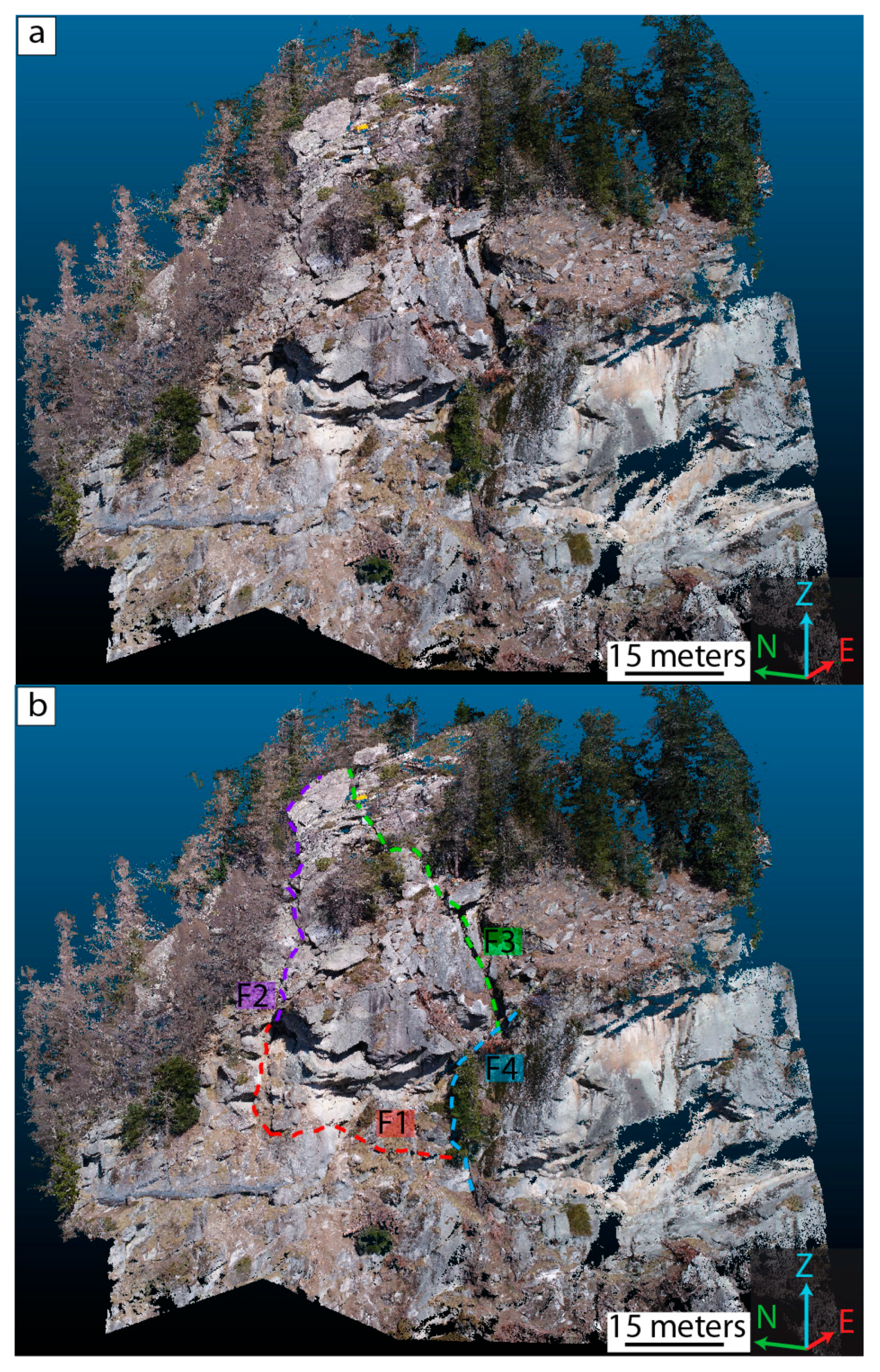
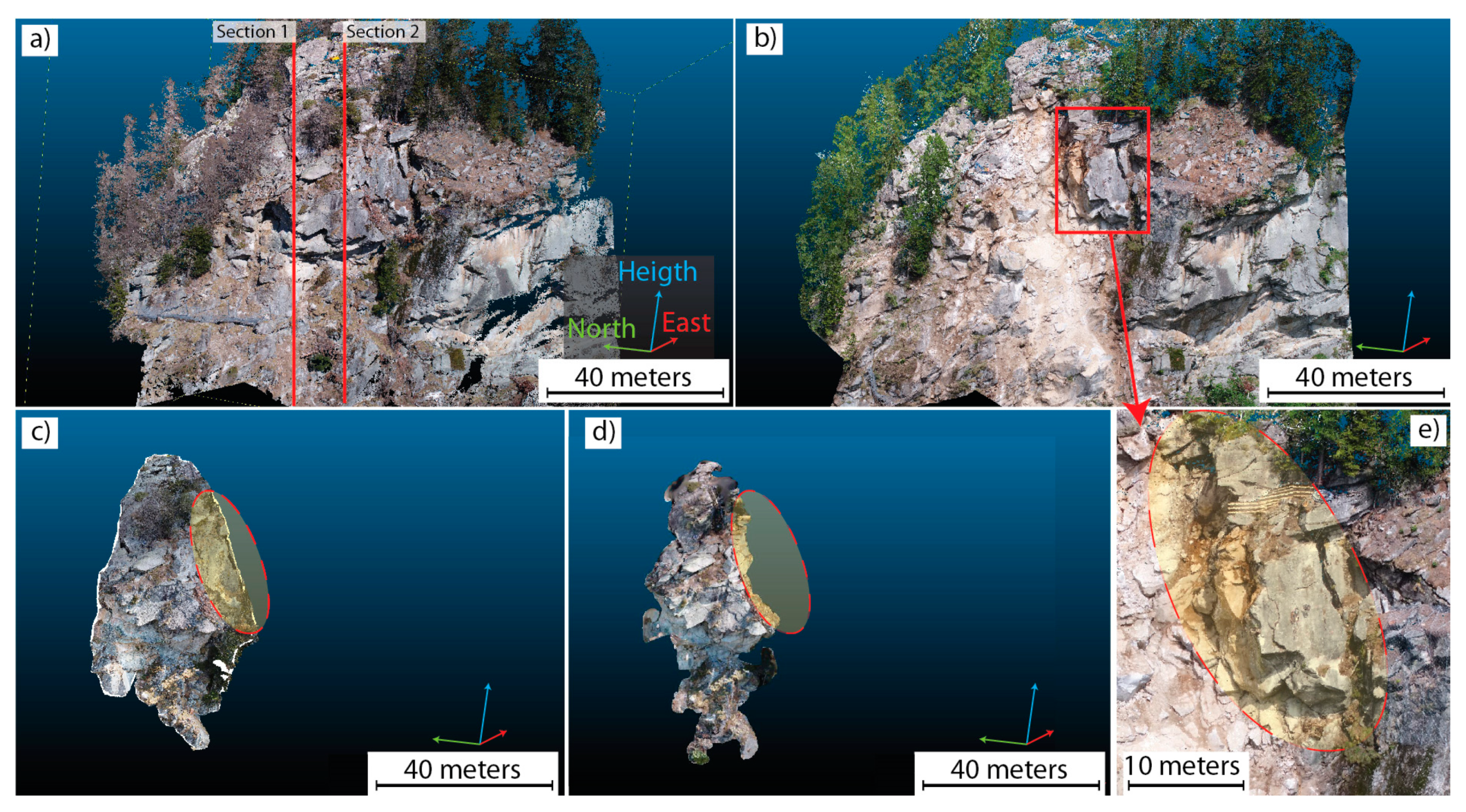
- Identification and mapping of the discontinuity traces that delimit the unstable critical block and estimation of the potential sliding surfaces or intersections (Figure 5a,b);
- (ii)
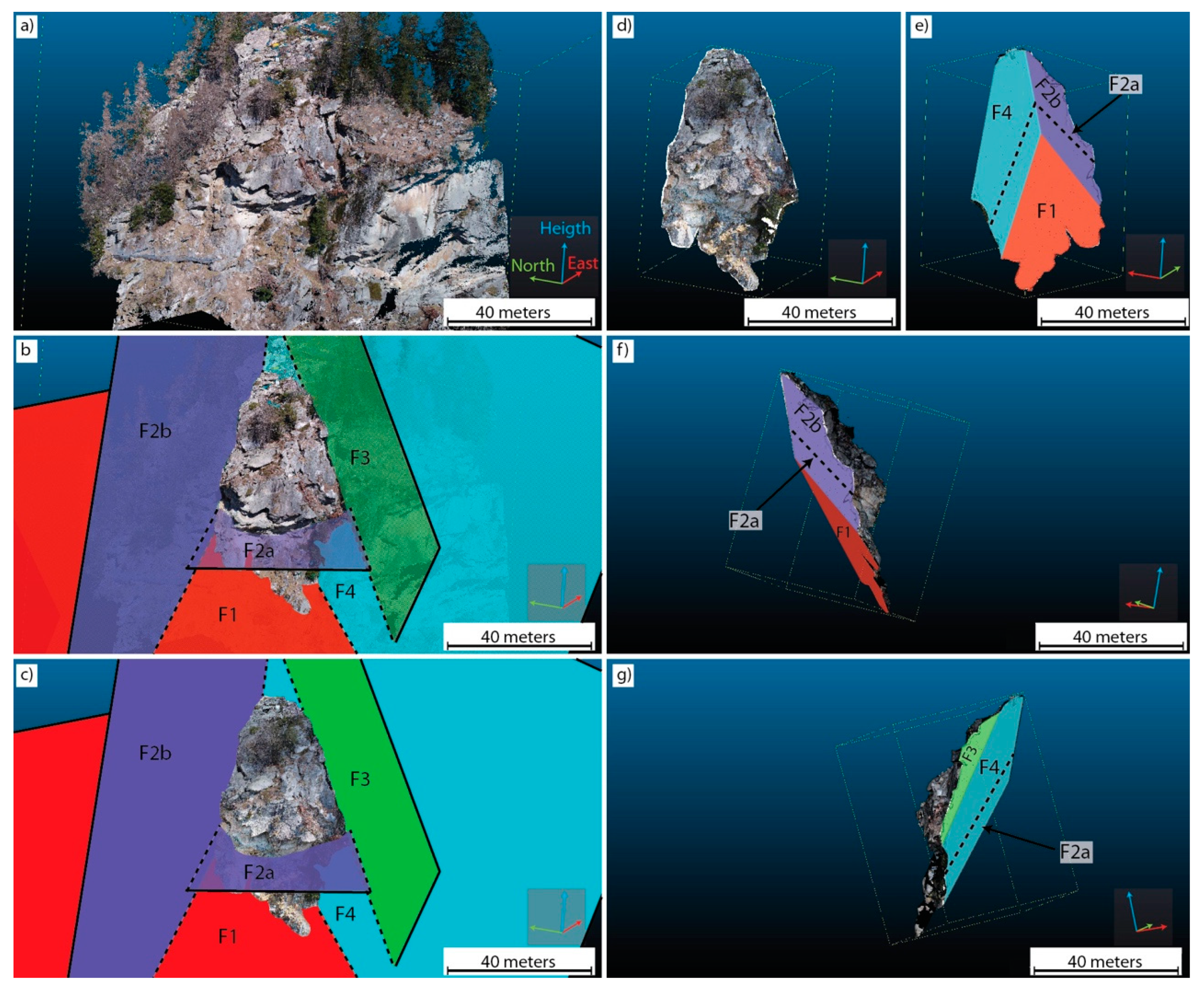
- delimitation of the unstable portion of the slope (Figure 5c,d);
- (iii)
- calculation of the volume of the unstable portion of the slope (Figure 5e,f).
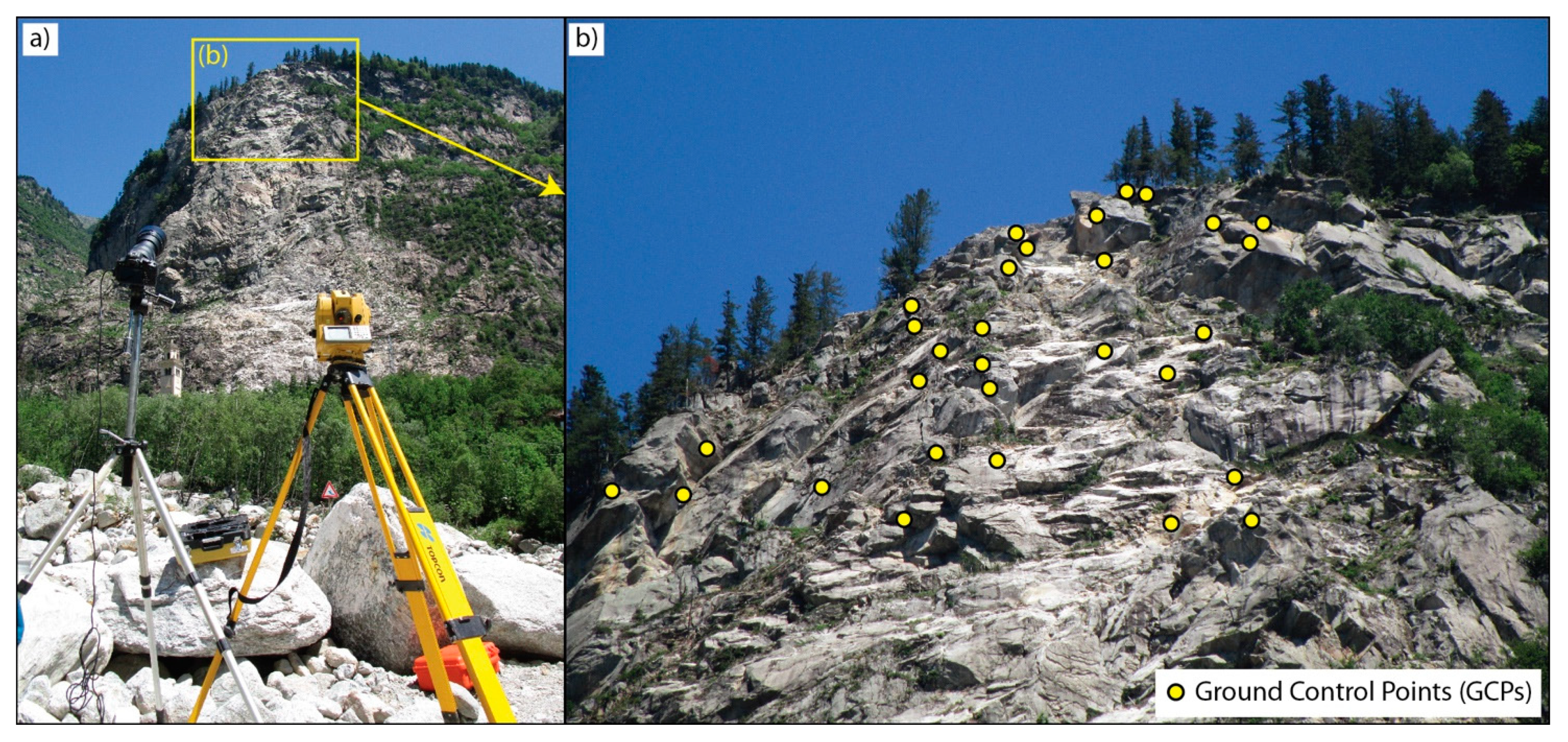
3.4. GCP Survey
4. Results
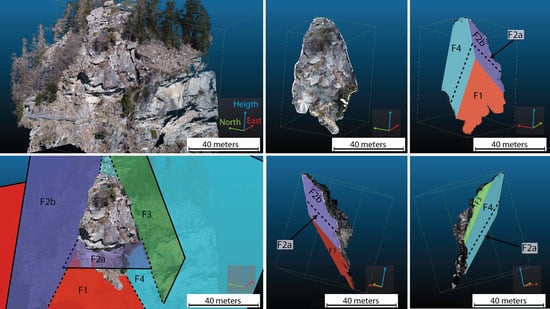
4.1. Pre-Failure Analysis
4.2. Post-Failure Analysis
- (a)
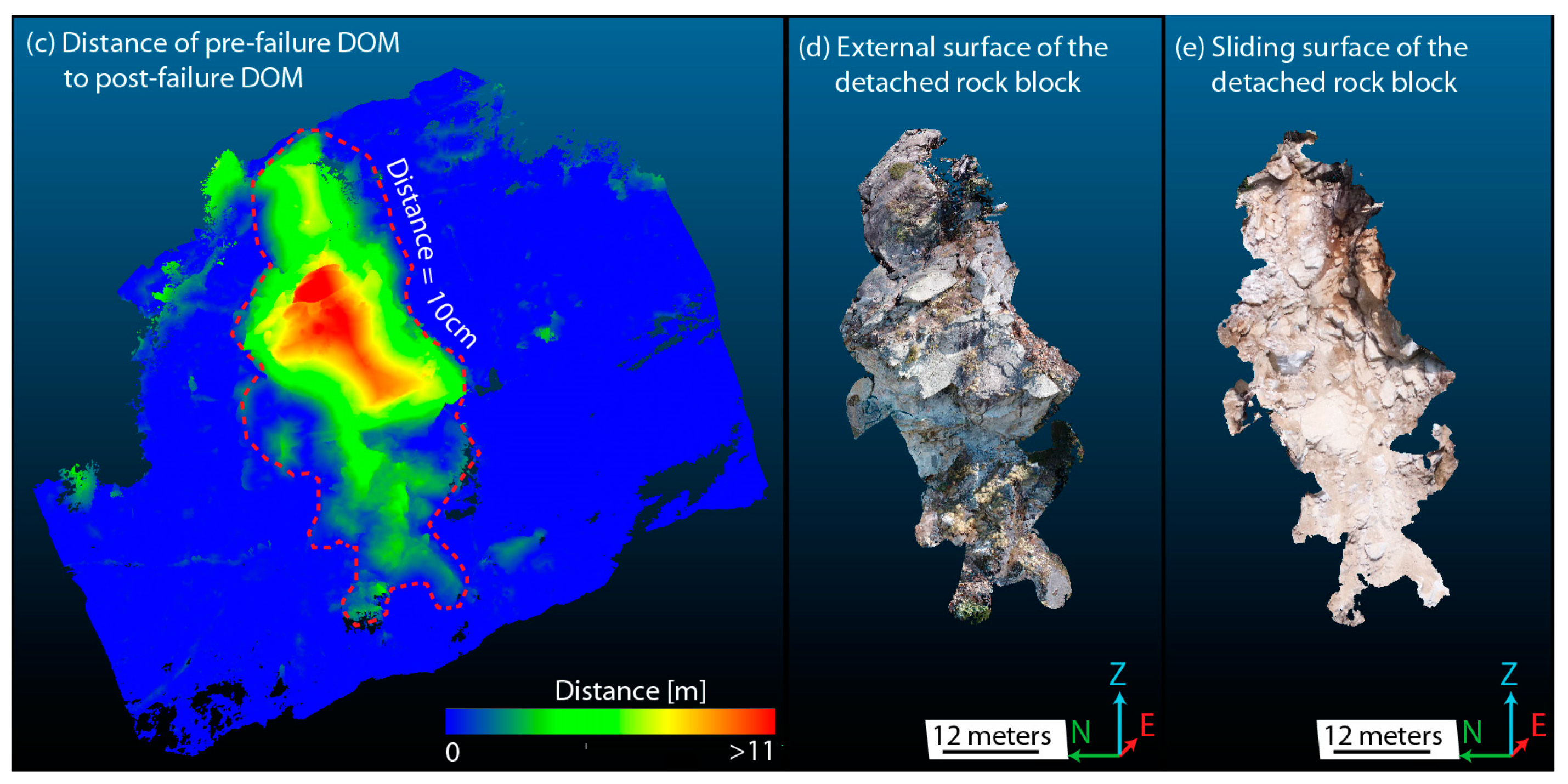
- Selection of the portion of DOMs that represent the same rock slope area before and after the landslide (Figure 15a,b);
- (b)
- calculation of the distance between the pre- and post-event 3D models using the M3C2 plugin (Figure 15c), a tool that permits to calculate the distance between two DOMs and plot it onto the 3D model surfaces;
- (c)
- delimitation of the external and the sliding surfaces using a distance threshold of 10 cm (red lines in Figure 15d,e);
4.3. Relative and Absolute Accuracy of the DOMs
5. Discussion
5.1. Case Specific Evaluations
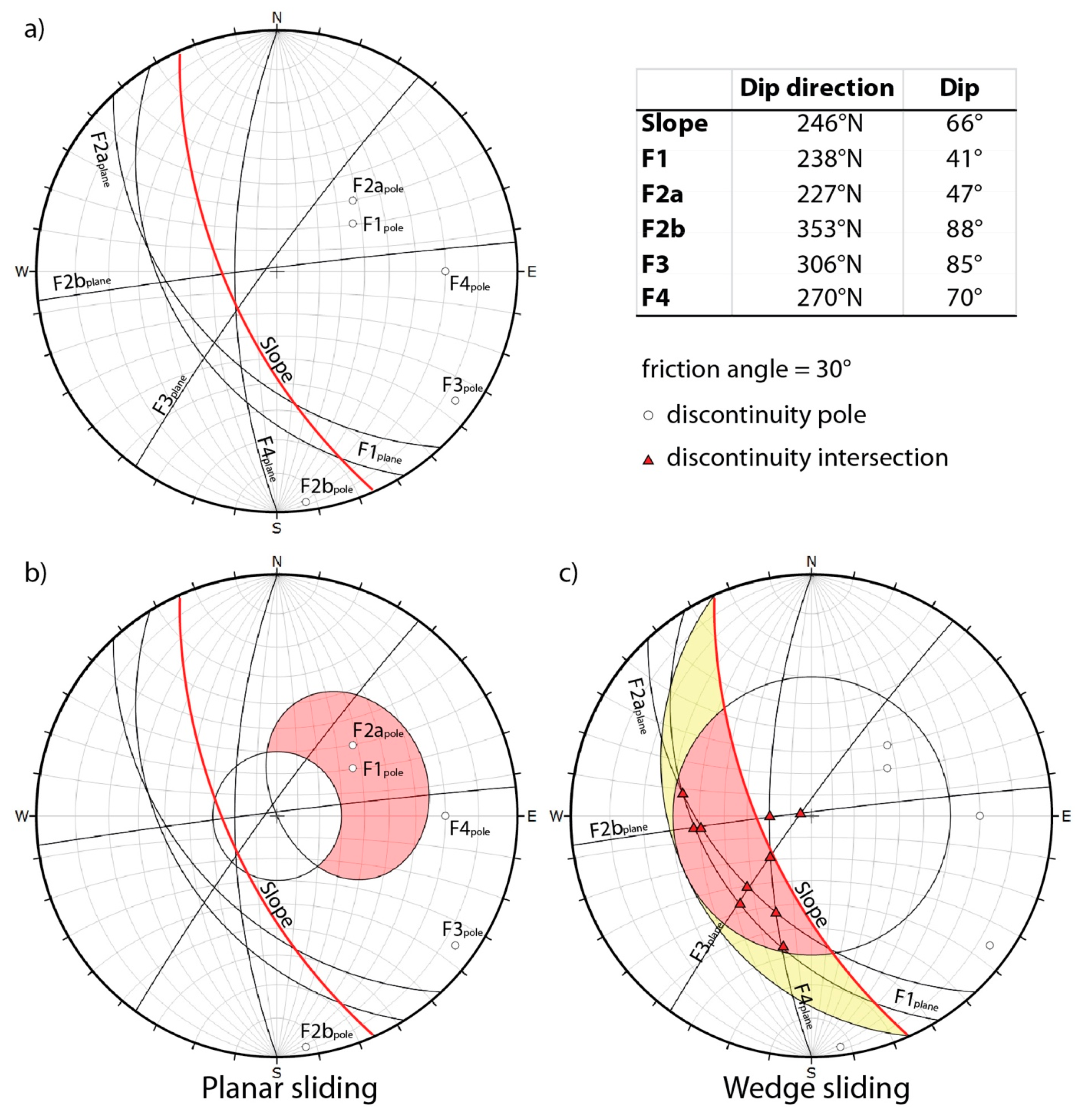
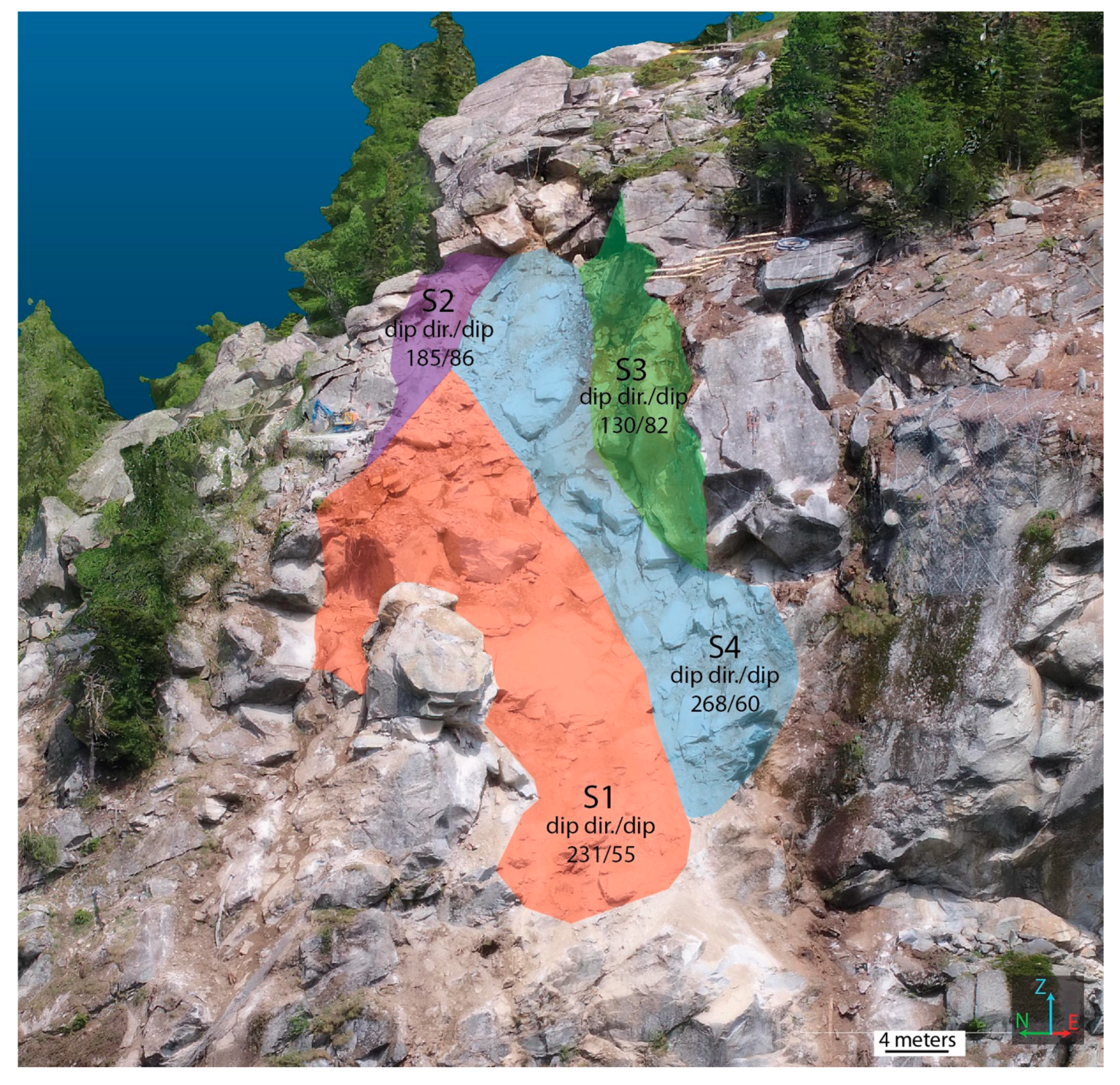
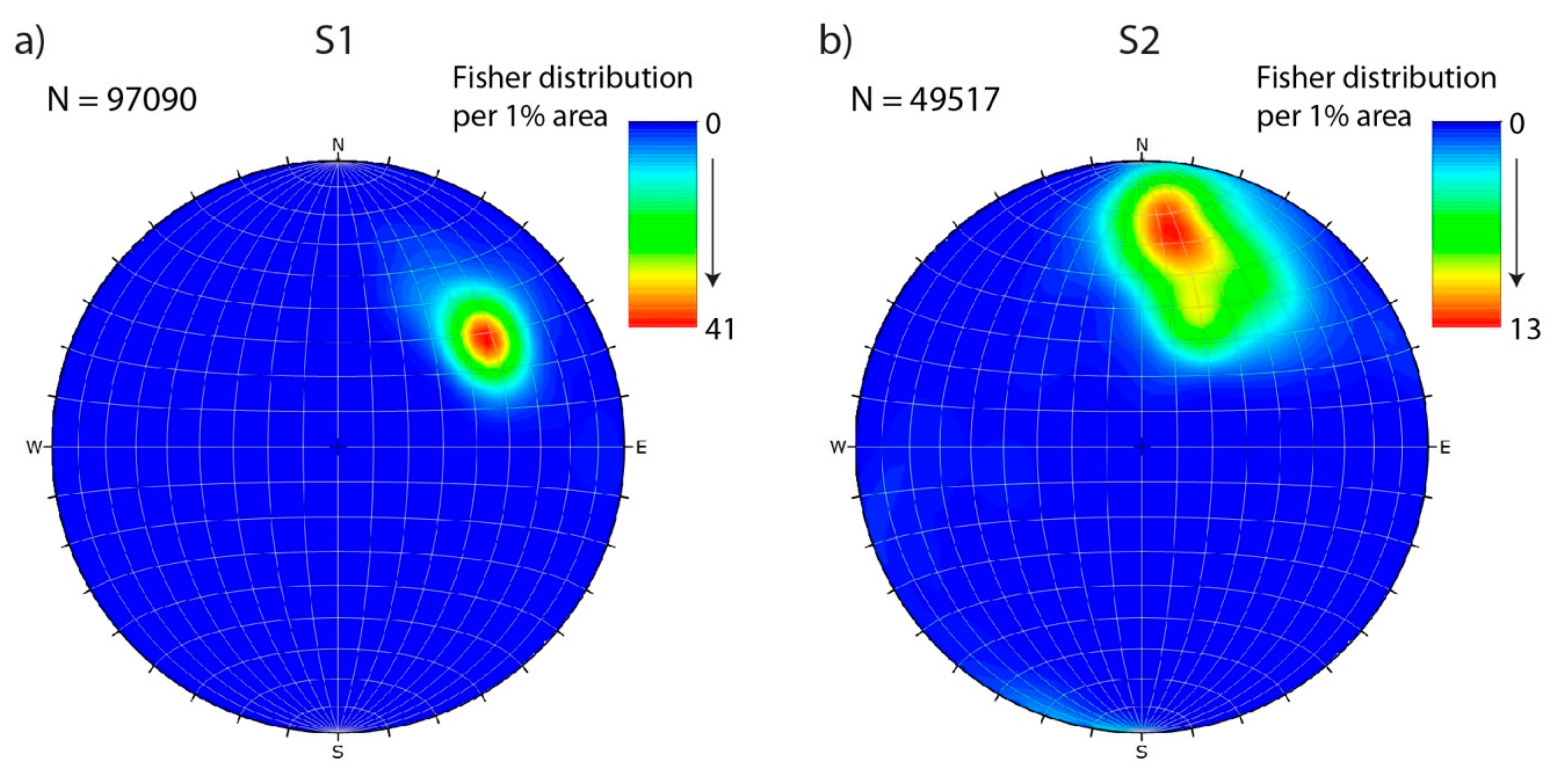
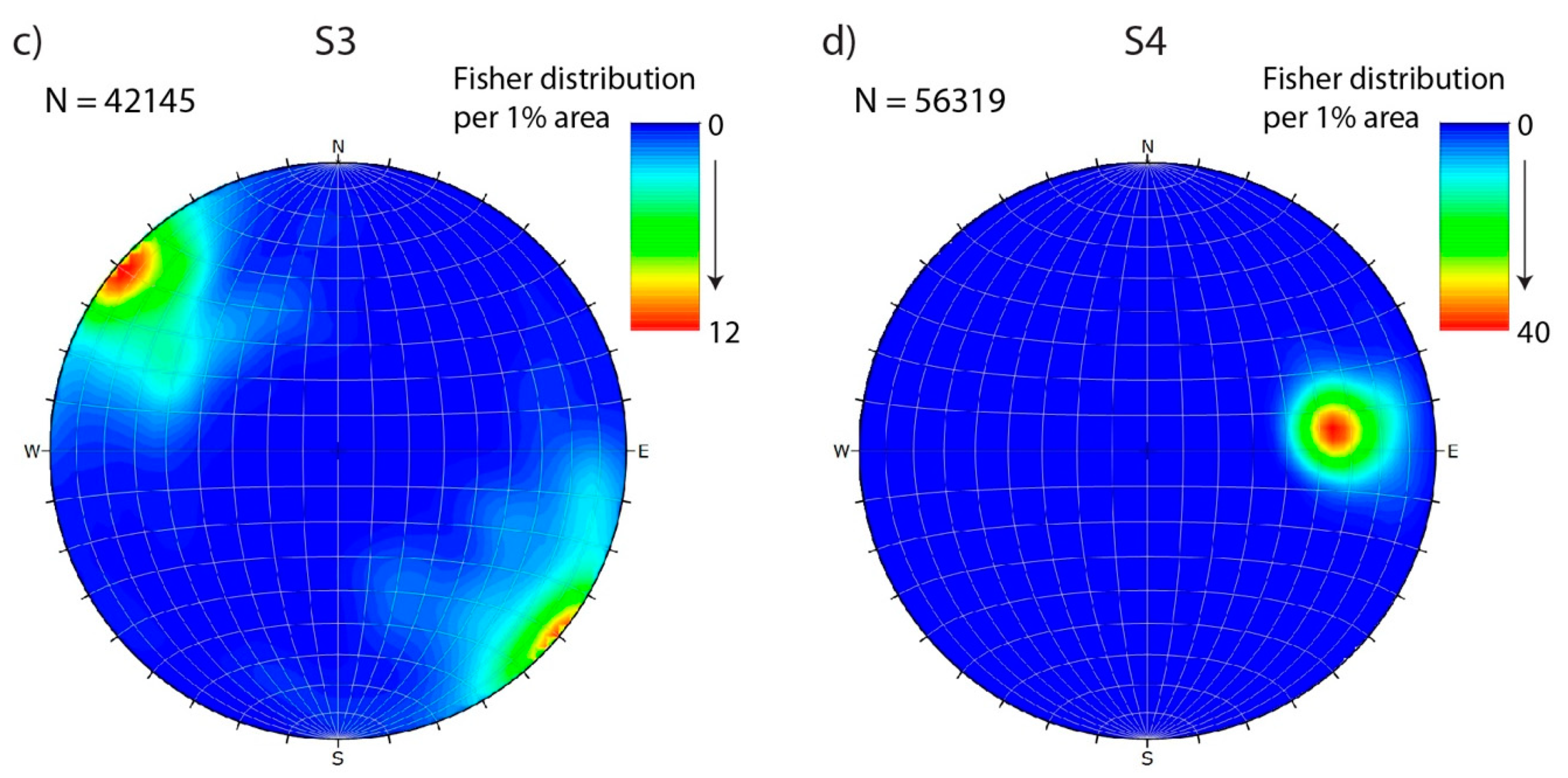
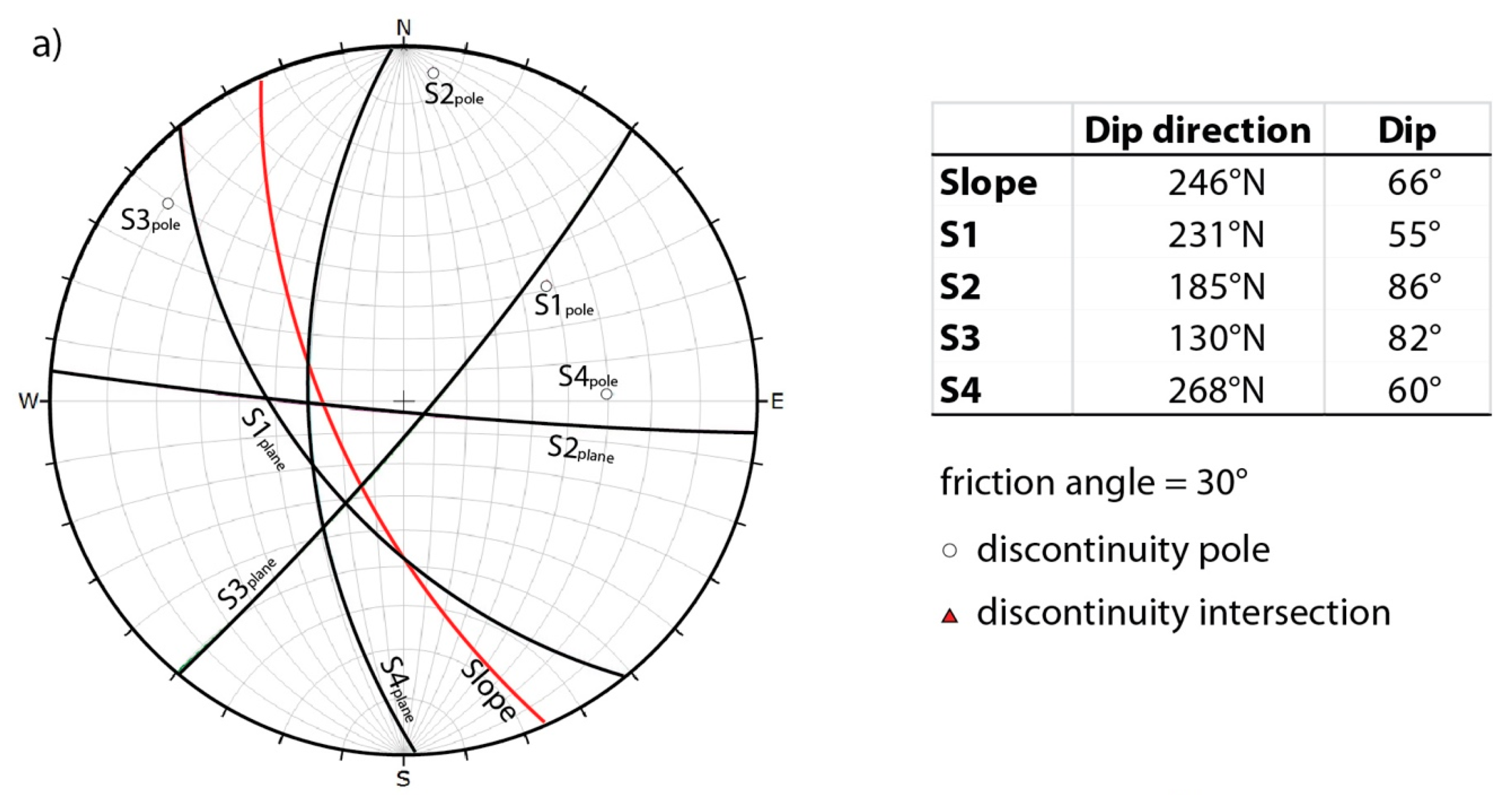
- The discontinuities really involved in the landside (S1, S2, S3 and S4 - Figure 12 and Figure 13) and detected in the post-failure DOMs have similar orientations, and the mechanism of failure of the landslide was correctly determined, with two fractures (F1, F4 and S1, S4 onto the pre- and post-failure DOMs, respectively) acting as sliding surfaces (Figure 10b and Figure 14b) and 4 discontinuity intersections critical for the wedge sliding (F1-F2b, F1-F3, F1-F4, F3-F4 and S1-S2, S1-S3, S1-S4, S3-S4) (Figure 10c and Figure 14c);
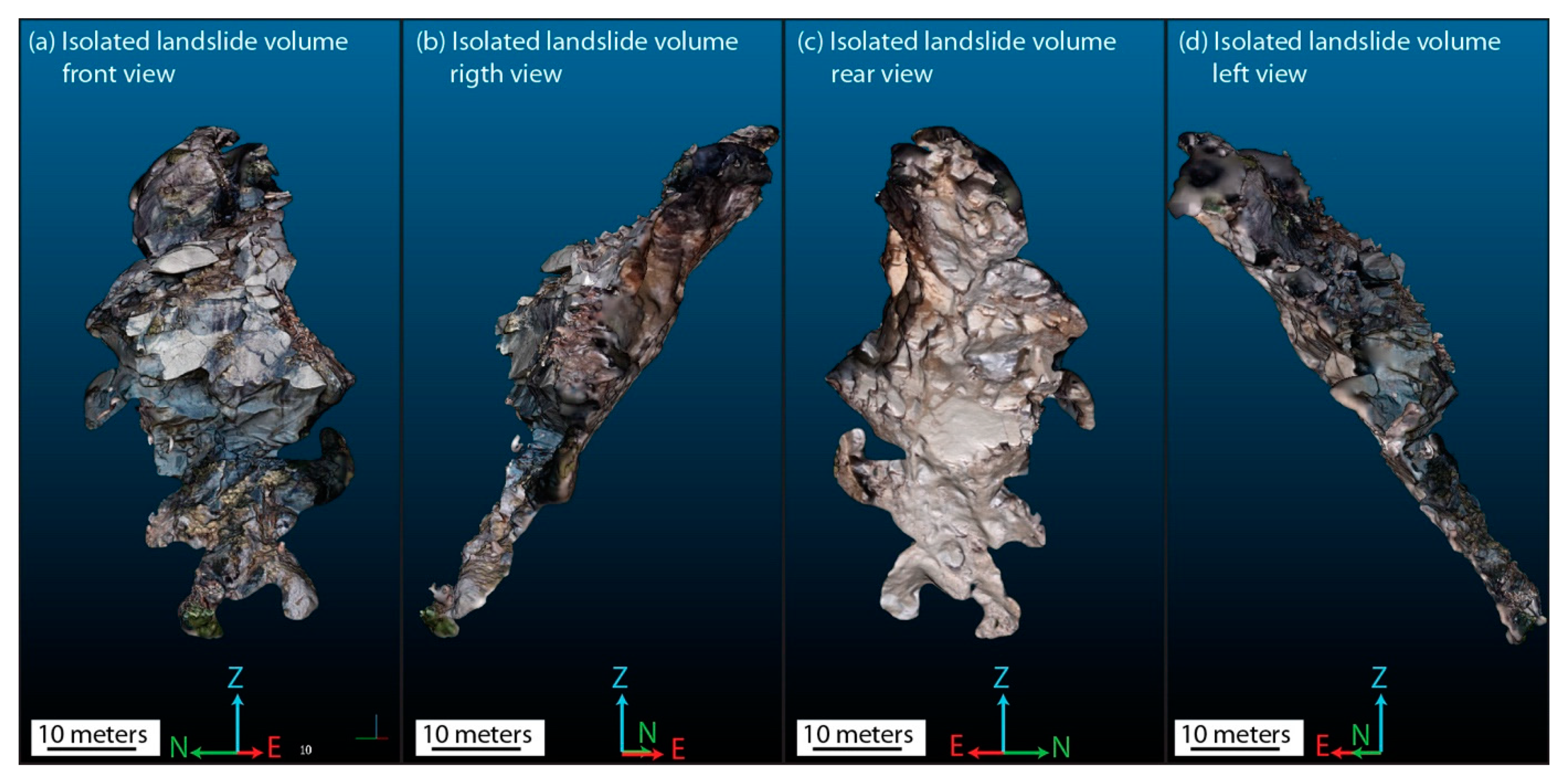
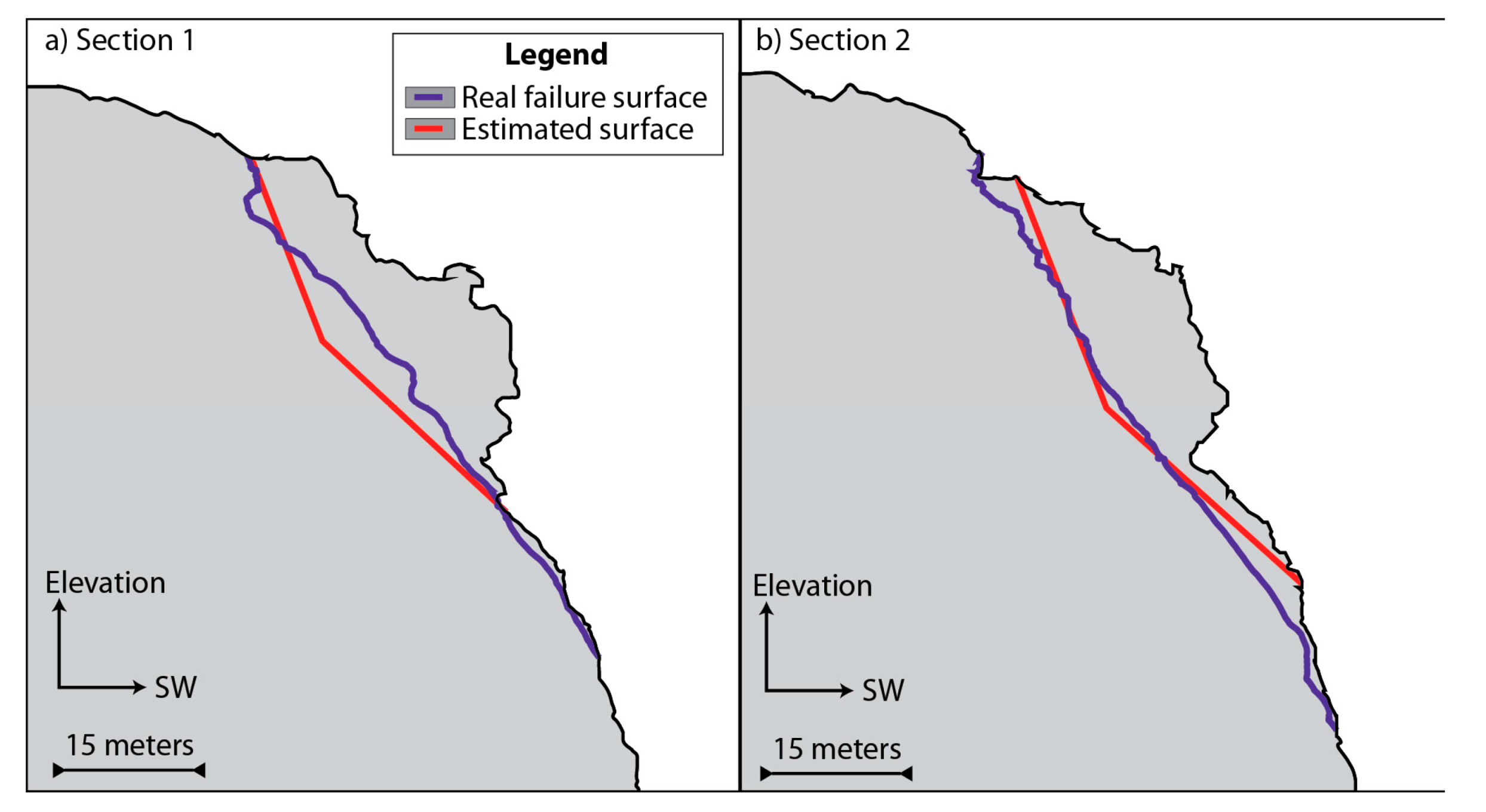
- the predicted volume of the landslide was overestimated by about 10% (~700 m3), considering that a rock block of about 809 m3 is in precarious conditions of equilibrium, but still in place (Figure 17). This difference seems due to the geometry of the effective failure surfaces that are wavy and rather irregular because probably they are the envelope of differently oriented fractures, while the sliding surfaces considered in the calculation were assumed to be planar;
- the differences in fracture measurements and the calculation of the volume of unstable rock performed on the Direct-Georeferenced (DG) and on the GCPs-georeferenced models are negligible from a geological point of view. This confirms the satisfying relative accuracy of the DG DOMs that shows an error in orientation <1°, and in the length of 4.5‰. Even the difference in the volume calculation was only 1.7% (134 m3). However, it must be considered that the absolute accuracy of these models is limited as they are affected by displacement errors of even a few meters (in this case around 2 m and 5 m of planar and vertical displacement, respectively), while the GCP-georeferenced models showed high absolute accuracy, with errors on the axes X, Y and Z always around 5 cm (similar to the total station accuracy).
5.2. Uncertainty Evaluation and Analysis
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Powers, P.S.; Chiarle, M.; Savage, W.Z. A digital photogrammetric method for measuring horizontal surficial movements on the Slumgullion earthflow, Hinsdale County, Colorado. Comput. Geosci. 1996, 22, 651–663. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Oppikofer, T.; Abellán, A.; Derron, M.H.; Loye, A.; Metzger, R.; Pedrazzini, A. Use of LIDAR in landslide investigations: A review. Nat. Hazards 2012, 61, 5–28. [Google Scholar] [CrossRef] [Green Version]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Humair, F.; Pedrazzini, A.; Epard, J.L.; Froese, C.R.; Jaboyedoff, M. Structural characterization of Turtle mountain anticline (Alberta, Canada) and impact on rock slope failure. Tectonophysics 2013, 605, 133–148. [Google Scholar] [CrossRef]
- Spreafico, M.C.; Francioni, M.; Cervi, F.; Stead, D.; Bitelli, G.; Ghirotti, M.; Girelli, V.A.; Lucente, C.C.; Tini, M.A.; Borgatti, L. Back Analysis of the 2014 San Leo landslide using combined terrestrial laser scanning and 3D distinct element modelling. Rock Mech. Rock Eng. 2016, 49, 2235–2251. [Google Scholar] [CrossRef] [Green Version]
- Menegoni, N.; Meisina, C.; Perotti, C.; Crozi, M. Analysis by UAV Digital Photogrammetry of Folds and Related Fractures in the Monte Antola Flysch Formation (Ponte Organasco, Italy). Geosciences 2018, 8, 299. [Google Scholar] [CrossRef] [Green Version]
- Menegoni, N.; Giordan, D.; Perotti, C.; Tannant, D.D. Detection and geometric characterization of rock mass discontinuities using a 3D high-resolution digital outcrop model generated from RPAS imagery–Ormea rock slope, Italy. Eng. Geol. 2019, 252, 145–163. [Google Scholar] [CrossRef]
- Sturzenegger, M.; Stead, D. Close-range terrestrial digital photogrammetry and terrestrial laser scanning for discontinuity characterization on rock cuts. Eng. Geol. 2009, 106, 163–182. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Francioni, M.; Salvini, R.; Stead, D.; Coggan, J. Improvements in the integration of remote sensing and rock slope modelling. Nat. Hazards 2018, 90, 975–1004. [Google Scholar] [CrossRef] [Green Version]
- Bemis, S.P.; Micklethwaite, S.; Turner, D.; James, M.R.; Akciz, S.; Thiele, S.T.; Bangash, H.A. Ground-based and UAV-based photogrammetry: A multi-scale, high-resolution mapping tool for structural geology and paleoseismology. J. Struct. Geol. 2014, 69, 163–178. [Google Scholar] [CrossRef]
- Giordan, D.; Adams, M.; Aicardi, I.; Alicandro, M.; Allasia, P.; Baldo, M.; De Berardinis, P.; Dominici, D.; Godone, D.; Hobbs, P.; et al. The use of unmanned aerial vehicles (UAVs) for engineering geology applications. Bull. Eng. Geol. Environ. 2020, 1–45. [Google Scholar] [CrossRef] [Green Version]
- Turner, D.; Lucieer, A.; Wallace, L. Direct georeferencing of ultrahigh-resolution UAV imagery. IEEE Trans. Geosci. Remote Sens. 2013, 52, 2738–2745. [Google Scholar] [CrossRef]
- Nikolakopoulos, K.G.; Koukouvelas, I.; Argyropoulos, N.; Megalooikonomou, V. Quarry monitoring using GPS measurements and UAV photogrammetry. In Earth Resources and Environmental Remote Sensing/GIS Applications VI; International Society for Optics and Photonics: Toulouse, France, 2015; p. 96440J. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; Smith, M.W. 3-D uncertainty-based topographic change detection with structure-from-motion photogrammetry: Precision maps for ground control and directly georeferenced surveys. Earth Surf. Process. Landf. 2017, 42, 1769–1788. [Google Scholar] [CrossRef]
- Forlani, G.; Dall’Asta, E.; Diotri, F.; Cella, U.M.D.; Roncella, R.; Santise, M. Quality assessment of DSMs produced from UAV flights georeferenced with onboard RTK positioning. Remote Sens. 2018, 10, 311. [Google Scholar] [CrossRef] [Green Version]
- Carbonneau, P.E.; Dietrich, J.T. Cost-effective non-metric photogrammetry from consumer-grade sUAS: Implications for direct georeferencing of structure from motion photogrammetry. Earth Surf. Process. Landf. 2017, 42, 473–486. [Google Scholar] [CrossRef] [Green Version]
- Cawood, A.J.; Bond, C.E.; Howell, J.A.; Butler, R.W.; Totake, Y. LiDAR, UAV or compass-clinometer? Accuracy, coverage and the effects on structural models. J. Struct. Geol. 2017, 98, 67–82. [Google Scholar] [CrossRef]
- Tziavou, O.; Pytharouli, S.; Souter, J. Unmanned Aerial Vehicle (UAV) based mapping in engineering geological surveys: Considerations for optimum results. Eng. Geol. 2018, 232, 12–21. [Google Scholar] [CrossRef] [Green Version]
- Fernández, O. Obtaining a best fitting plane through 3D georeferenced data. J. Struct. Geol. 2005, 27, 855–858. [Google Scholar] [CrossRef]
- Seers, T.D.; Hodgetts, D. Probabilistic constraints on structural lineament best fit plane precision obtained through numerical analysis. J. Struct. Geol. 2016, 82, 37–47. [Google Scholar] [CrossRef]
- Thiele, S.T.; Grose, L.; Cui, T.; Cruden, A.R.; Micklethwaite, S. Extraction of high-resolution structural orientations from digital data: A Bayesian approach. J. Struct. Geol. 2019, 122, 106–115. [Google Scholar] [CrossRef]
- Quinn, D.P.; Ehlmann, B.L. A PCA-based framework for determining remotely sensed geological surface orientations and their statistical quality. Earth Space Sci. 2019, 6, 1378–1408. [Google Scholar] [CrossRef] [PubMed]
- Bonneau, D.; DiFrancesco, P.M.; Hutchinson, D.J. Surface Reconstruction for Three-Dimensional Rockfall Volumetric Analysis. ISPRS Int. J. Geo-Inf. 2019, 8, 548. [Google Scholar] [CrossRef] [Green Version]
- Marquer, D. Structures et cinématique des déformations alpines dans le granite de Truzzo (Nappe de Tambo: Alpes centrales suisses). Eclogae Geol. Helv. 1991, 84, 107. [Google Scholar]
- Ferrari, F.; Apuani, T.; Giani, G.P. Applicazione di modelli cinematici per lo studio di frane di crollo in media Val San Giacomo (SO). Geoing. Ambient. Min. 2011, XLVIII, 55–64. [Google Scholar]
- Ferrari, F.; Apuani, T.; Giani, G.P. Rock Mass Rating spatial estimation by geostatistical analysis. Int. J. Rock Mech. Min. Sci. 2014, 70, 162–176. [Google Scholar] [CrossRef] [Green Version]
- Marquer, D.; Baudin, T.; Peucat, J.J.; Persoz, F. Rb-Sr mica ages in the Alpine shear zones of the Truzzo granite: Timing of the Tertiary alpine PT-deformations in the Tambo nappe (Central Alps, Switzerland). Eclogae Geol. Helv. 1994, 87, 225–229. [Google Scholar]
- Baudin, T.; Marquer, D.; Persoz, F. Basement-cover relationships in the Tambo nappe (Central Alps, Switzerland): Geometry, structure and kinematics. J. Struct. Geol. 1993, 15, 543–553. [Google Scholar] [CrossRef]
- Dei Cas, L.; Pastore, M.L.; Rivolta, C. Gallivaggio landslide: The geological monitoring, of a rock cliff, for early warning system. Ital. J. Eng. Geol. Environ. 2018, 18, 41–55. [Google Scholar] [CrossRef]
- Carlà, T.; Nolesini, T.; Solari, L.; Rivolta, C.; Dei Cas, L.; Casagli, N. Rockfall forecasting and risk management along a major transportation corridor in the Alps through ground-based radar interferometry. Landslides 2019, 16, 1425–1435. [Google Scholar] [CrossRef] [Green Version]
- Kazhdan, M.; Hoppe, H. Screened poisson surface reconstruction. ACM Trans. Graph. 2013, 32, 29. [Google Scholar] [CrossRef] [Green Version]
- Chesley, J.T.; Leier, A.L.; White, S.; Torres, R. Using unmanned aerial vehicles and structure-from-motion photogrammetry to characterize sedimentary outcrops: An example from the Morrison Formation, Utah, USA. Sediment. Geol. 2017, 354, 1–8. [Google Scholar] [CrossRef]
- Jang, H.S.; Zhang, Q.Z.; Kang, S.S.; Jang, B.A. Determination of the basic friction angle of rock surfaces by tilt tests. Rock Mech. Rock Eng. 2018, 51, 989–1004. [Google Scholar] [CrossRef]
- Tonini, M.; Abellan, A. Rockfall detection from terrestrial LiDAR point clouds: A clustering approach using R. J. Spat. Inf. Sci. 2014, 8, 95–110. [Google Scholar] [CrossRef]
- Van Veen, M.; Hutchinson, D.J.; Kromer, R.; Lato, M.; Edwards, T. Effects of sampling interval on the frequency-magnitude relationship of rockfalls detected from terrestrial laser scanning using semi-automated methods. Landslides 2017, 14, 1579–1592. [Google Scholar] [CrossRef]
- Le Roy, G.; Helmstetter, A.; Amitrano, D.; Guyoton, F.; Le Roux-Mallouf, R. Seismic analysis of the detachment and impact phases of a rockfall and application for estimating rockfall volume and free-fall height. J. Geophys. Res. Earth Surf. 2019, 124, 2602–2622. [Google Scholar] [CrossRef]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (NZ). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef] [Green Version]
- Wiemann, T.; Annuth, H.; Lingemann, K.; Hertzberg, J. An extended evaluation of open source surface reconstruction software for robotic applications. J. Intell. Robot. Syst. 2015, 77, 149–170. [Google Scholar] [CrossRef]
- Zhu, L.; Kukko, A.; Virtanen, J.P.; Hyyppä, J.; Kaartinen, H.; Hyyppä, H.; Turppa, T. Multisource point clouds, point simplification and surface reconstruction. Remote Sens. 2019, 11, 2659. [Google Scholar] [CrossRef] [Green Version]
- Jaboyedoff, M.; Carrea, D.; Derron, M.H.; Oppikofer, T.; Penna, I.M.; Rudaz, B. A review of methods used to estimate initial landslide failure surface depths and volumes. Eng. Geol. 2020, 267, 105478. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RPAS | Camera | ||
|---|---|---|---|
| Type | DJI Phantom 4 Pro Quadcopter | Type | DIJ FC330X |
| Diagonal size [cm] | 35 | Sensor type | CMOS |
| Engines | Brushless | Sensor size [mm] | 13.2 × 8.8 |
| Rotor diameters [cm] | 12 | Image size [pixel] | 4864 × 3648 |
| Empty weight [kg] | 1.4 | Pixel size [μm] | 2.61 × 2.461 |
| Focal length [mm] | 8.8 | ||
| Number of Points/Faces | Density of Points | Mean Face Area | ||
|---|---|---|---|---|
| Before landslide | Point cloud | 28 Million | 4500 pts/m2 | / |
| Mesh | 5.6 Million | / | 19 cm2 | |
| After landslide | Point cloud | 21.5 Million | 266 pts/m2 | / |
| Mesh | 3.3 Million | / | 493 cm2 |
| Easting (X) | Northing (Y) | Planar (XY) | Elevation (Z) | |
|---|---|---|---|---|
| Mean error (m) | −2.510 | −1.327 | 2.867 | 5.646 |
| St. Deviation (m) | 0.120 | 0.446 | 0.216 | 0.309 |
| Easting (X) | Northing (Y) | Planar (XY) | Elevation (Z) | ||
|---|---|---|---|---|---|
| GCPs | Mean error (cm) | 3.4 | 4.8 | 5.9 | 3.5 |
| St. Deviation (cm) | 2.5 | 3.6 | 4.4 | 2.7 | |
| CKPs | Mean error (cm) | 4.4 | 8.7 | 9.7 | 4.8 |
| St. Deviation (cm) | 4.1 | 6.5 | 7.7 | 3.5 |
| Length (m) | Length (‰) | Azimuth (°) | Plunge (°) | |
|---|---|---|---|---|
| Mean | 0.285 | 4.5‰ | 0.6 | 0.1 |
| St. Deviation | 0.358 | 5‰ | 0.6 | 0.6 |
| Median | 0.283 | 4.5‰ | 0.6 | 0.1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Menegoni, N.; Giordan, D.; Perotti, C. Reliability and Uncertainties of the Analysis of an Unstable Rock Slope Performed on RPAS Digital Outcrop Models: The Case of the Gallivaggio Landslide (Western Alps, Italy). Remote Sens. 2020, 12, 1635. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12101635
Menegoni N, Giordan D, Perotti C. Reliability and Uncertainties of the Analysis of an Unstable Rock Slope Performed on RPAS Digital Outcrop Models: The Case of the Gallivaggio Landslide (Western Alps, Italy). Remote Sensing. 2020; 12(10):1635. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12101635
Chicago/Turabian StyleMenegoni, Niccolò, Daniele Giordan, and Cesare Perotti. 2020. "Reliability and Uncertainties of the Analysis of an Unstable Rock Slope Performed on RPAS Digital Outcrop Models: The Case of the Gallivaggio Landslide (Western Alps, Italy)" Remote Sensing 12, no. 10: 1635. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12101635