Comparison of Above-Water Seabird and TriOS Radiometers along an Atlantic Meridional Transect

 , , , ,
, , , ,
Abstract
:
1. Introduction
- a comparison of radiance and irradiance sources used for calibration of radiometers National Physics Laboratory-UK(NPL, UK) [9];
- an indoor comparison of uniformly calibrated radiometers measuring stable radiance and irradiance sources where the illumination conditions and measurement geometry were strictly controlled and close to ideal [10];
- an outdoor comparison over a Case 2 water body with the radiometers installed on the fixed platform (Lake Kääriku, Estonia). The illumination conditions during this experiment were variable due to the weather, while the measurement geometry resembled as closely as possible to the realistic field conditions [11];
- a further outdoor comparison with the same instruments a year later on a fixed platform (the Aqua Alta Oceanographic Tower—AAOT) under near-ideal environmental conditions [12];
- a shipborne campaign on the Atlantic Meridional Transect 27 (AMT27), (the current study).
2. Materials and Methods
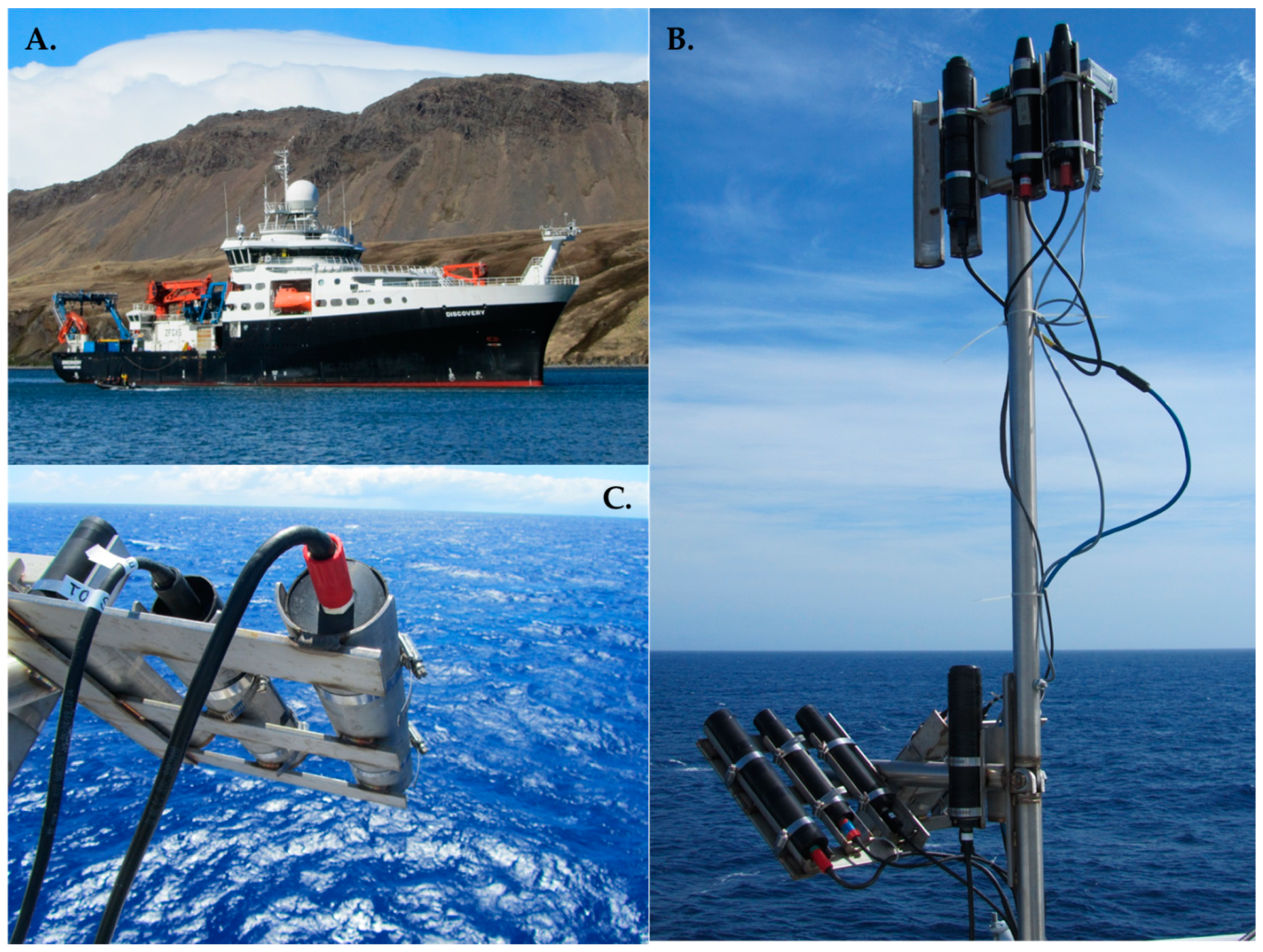
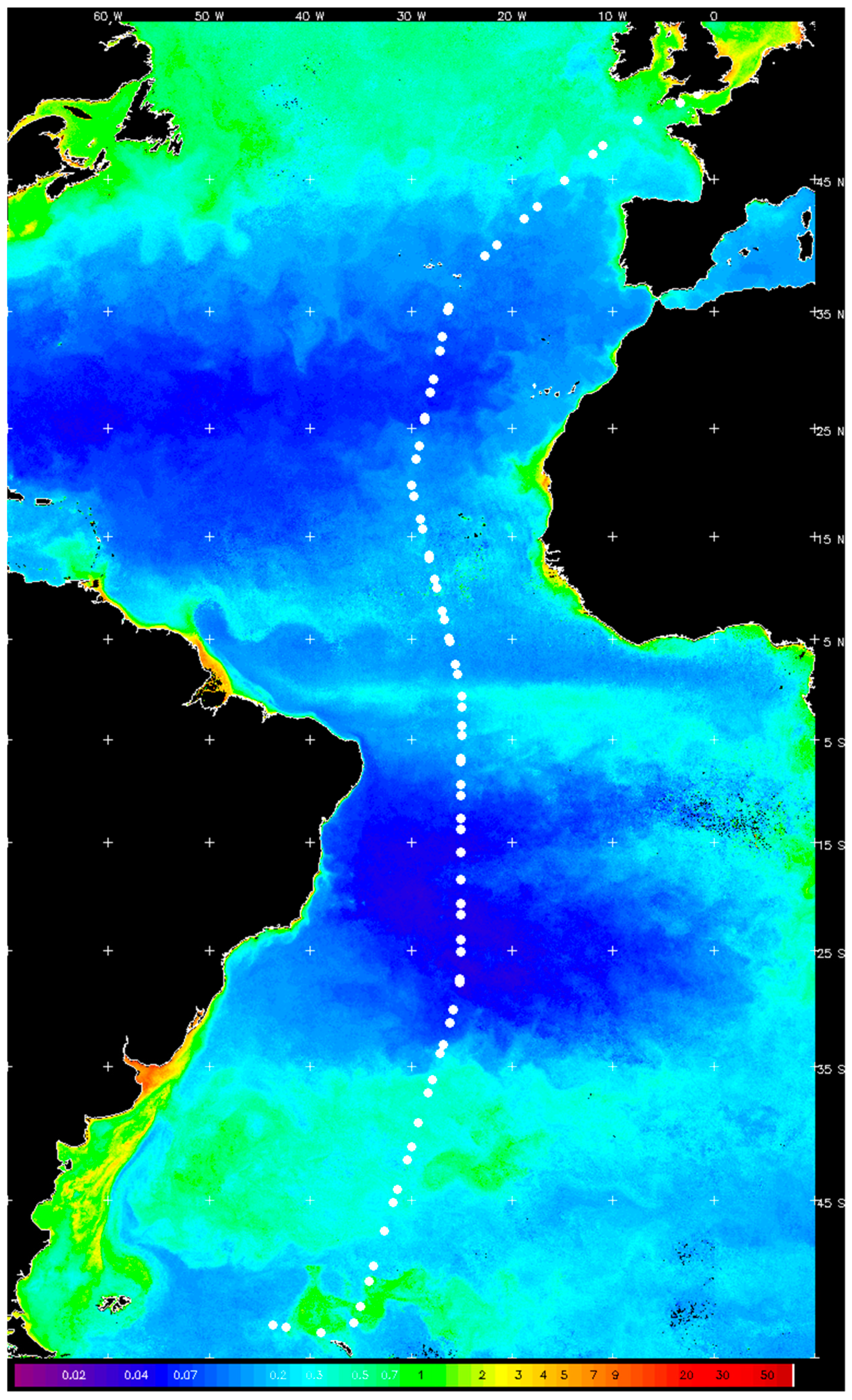
2.1. Study Site
2.2. In Situ Above-Water Radiometric Data
2.3. In Situ Data Processing
2.4. Sentinel-3A OLCI Data
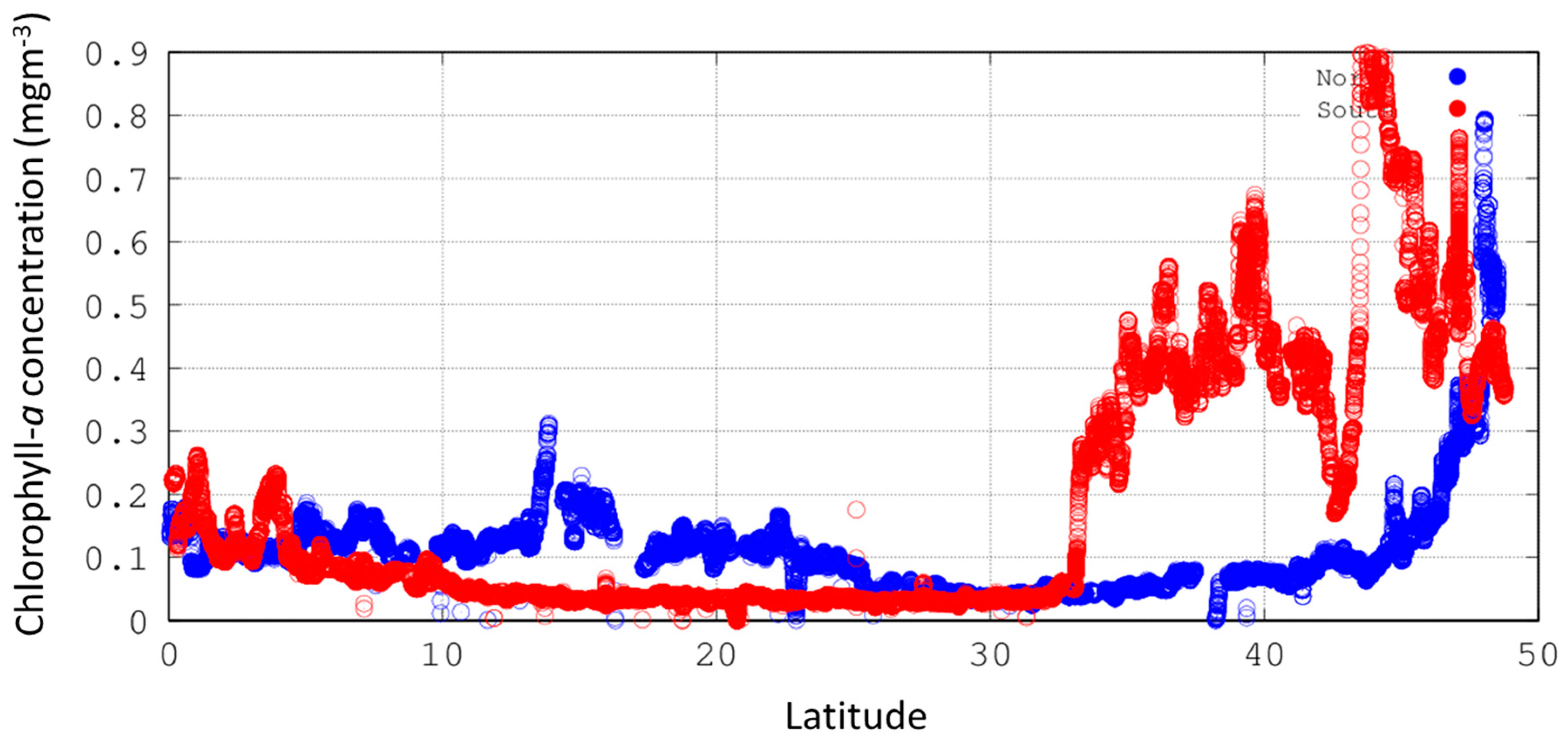
2.5. Measurement of Chlorophyll-a
3. Results
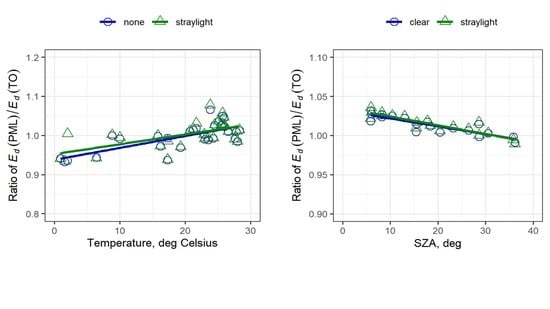
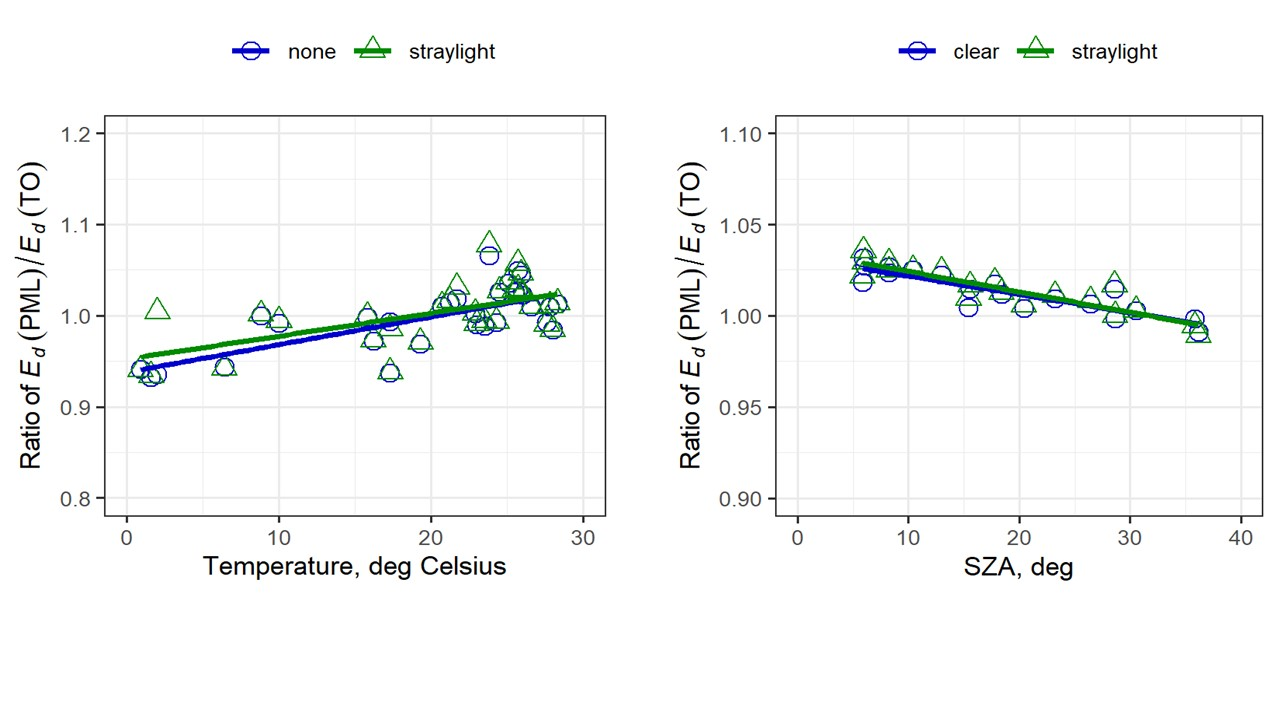
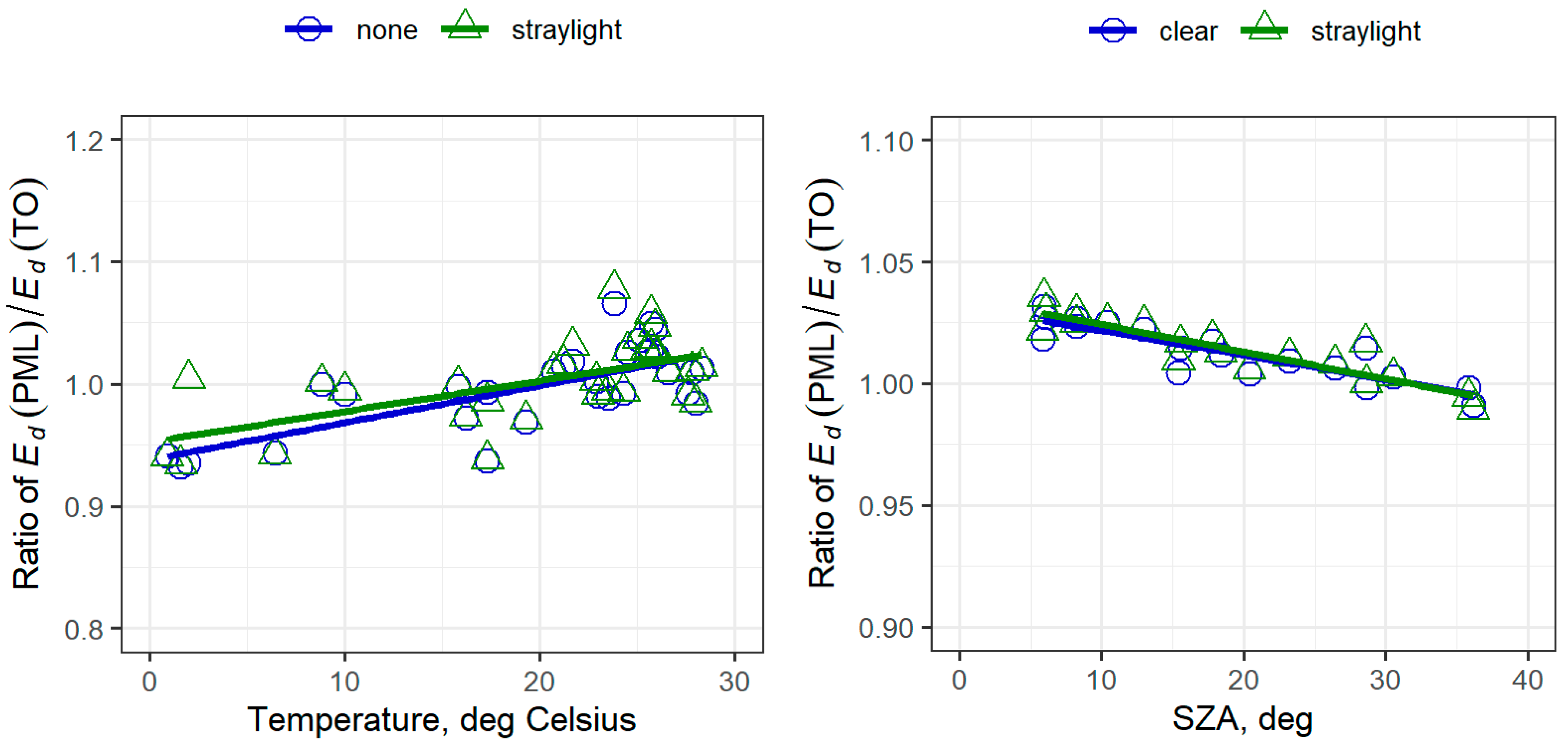
3.1. Environmental Effects
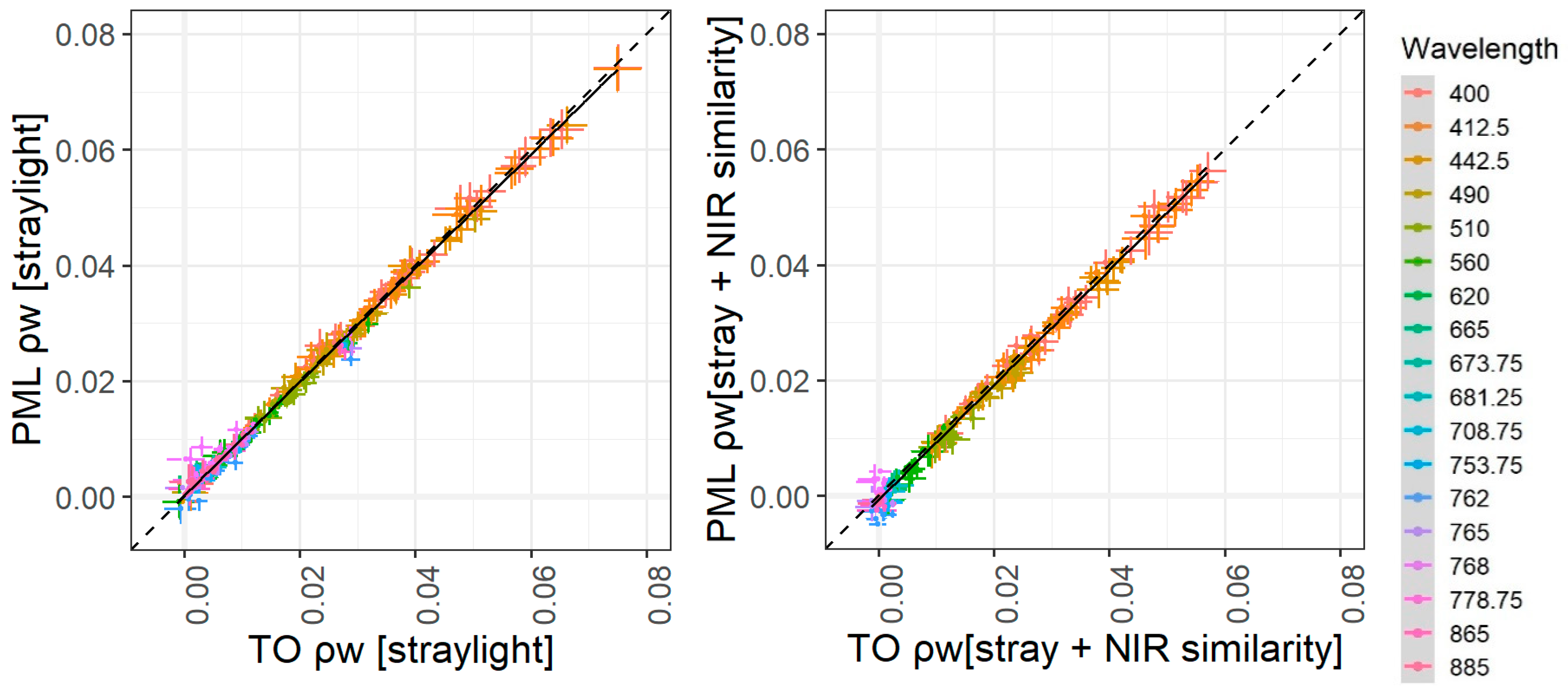
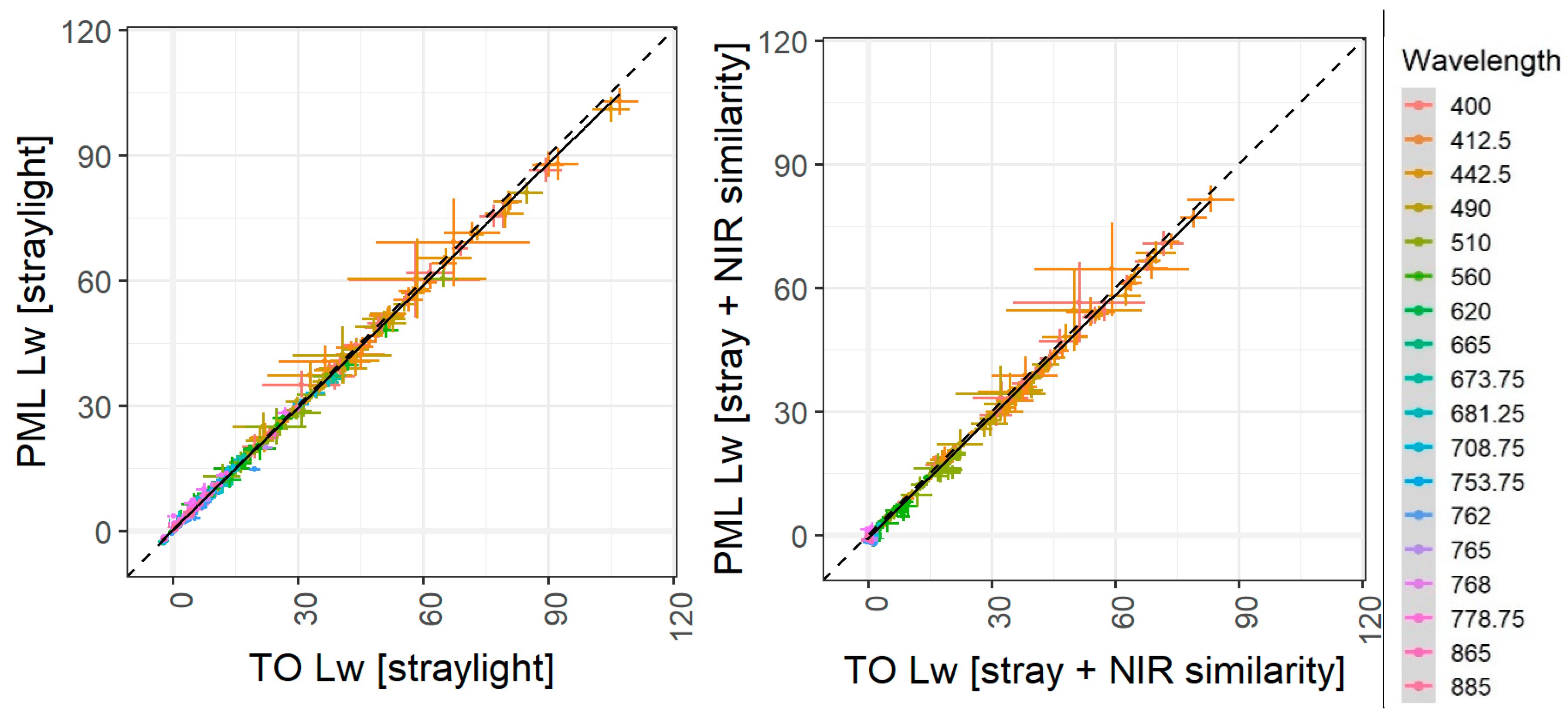
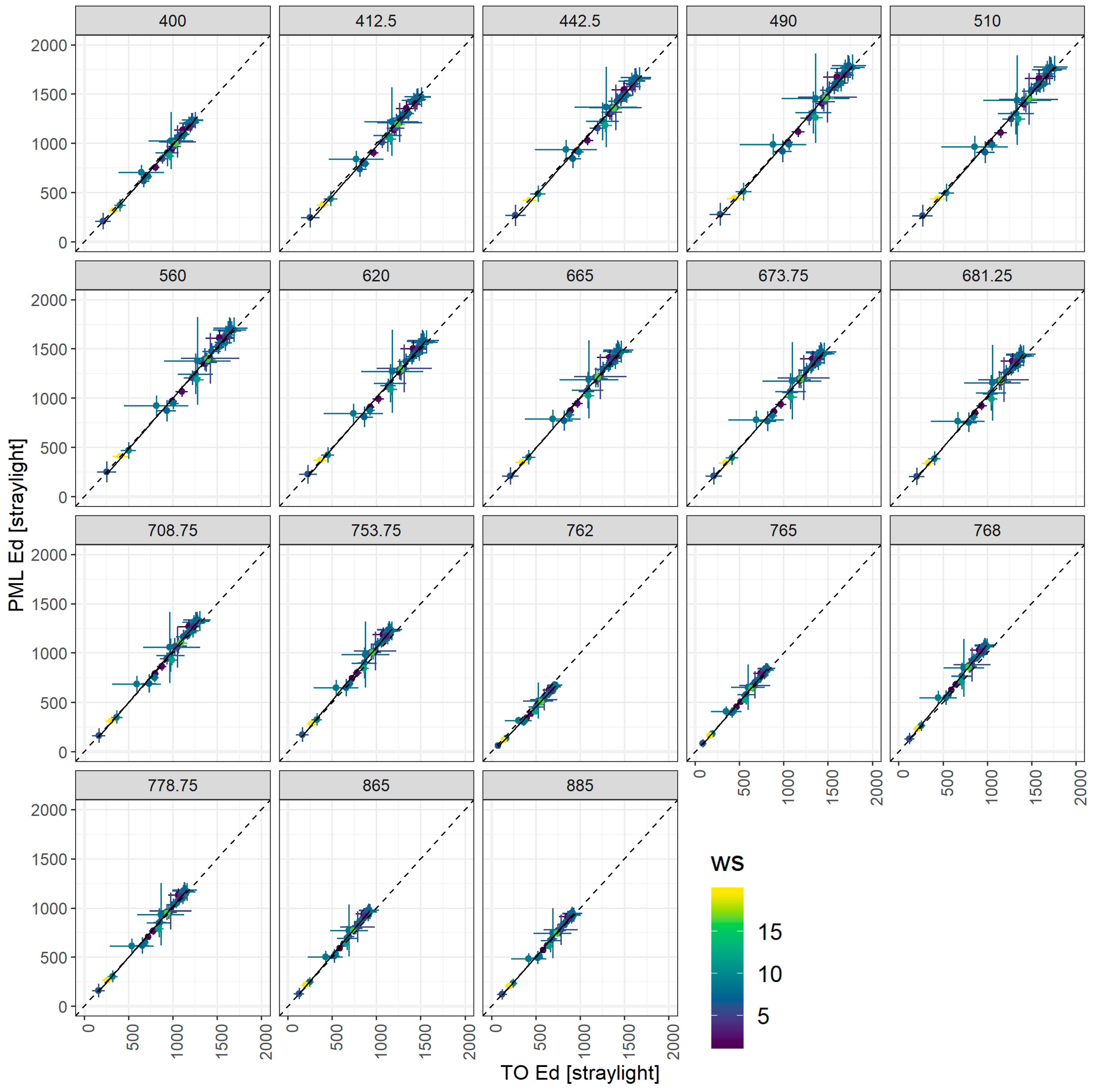
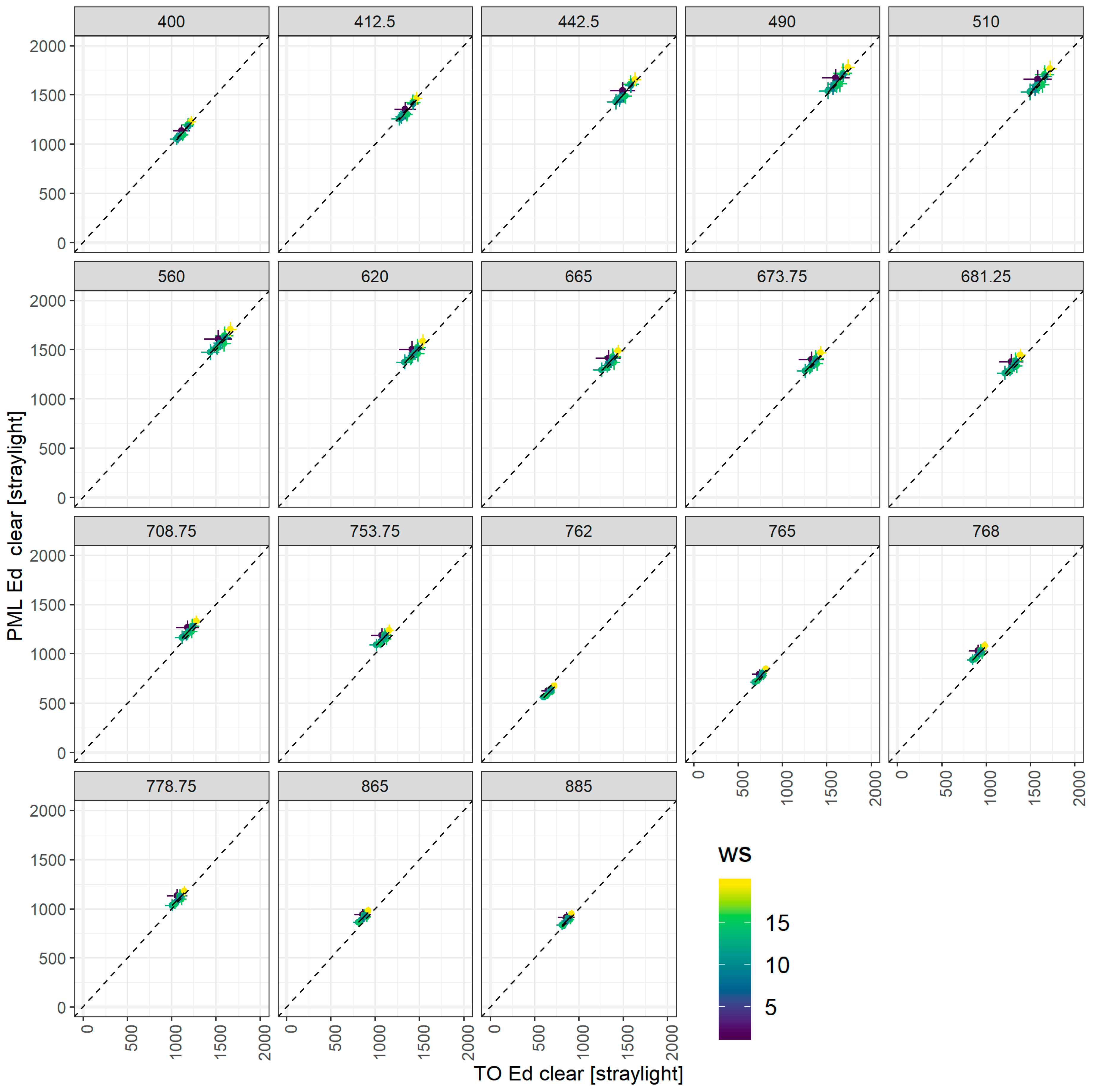
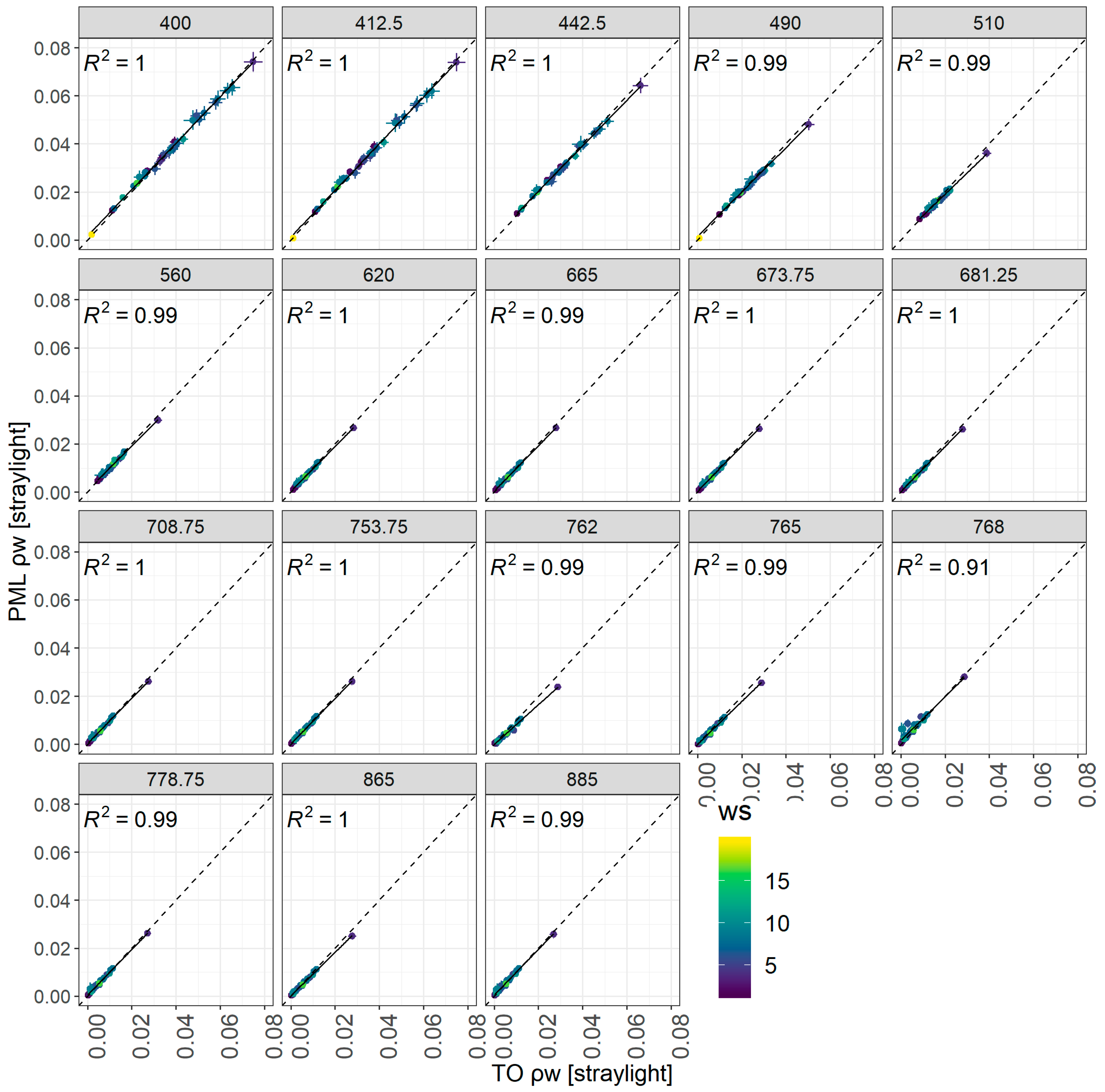
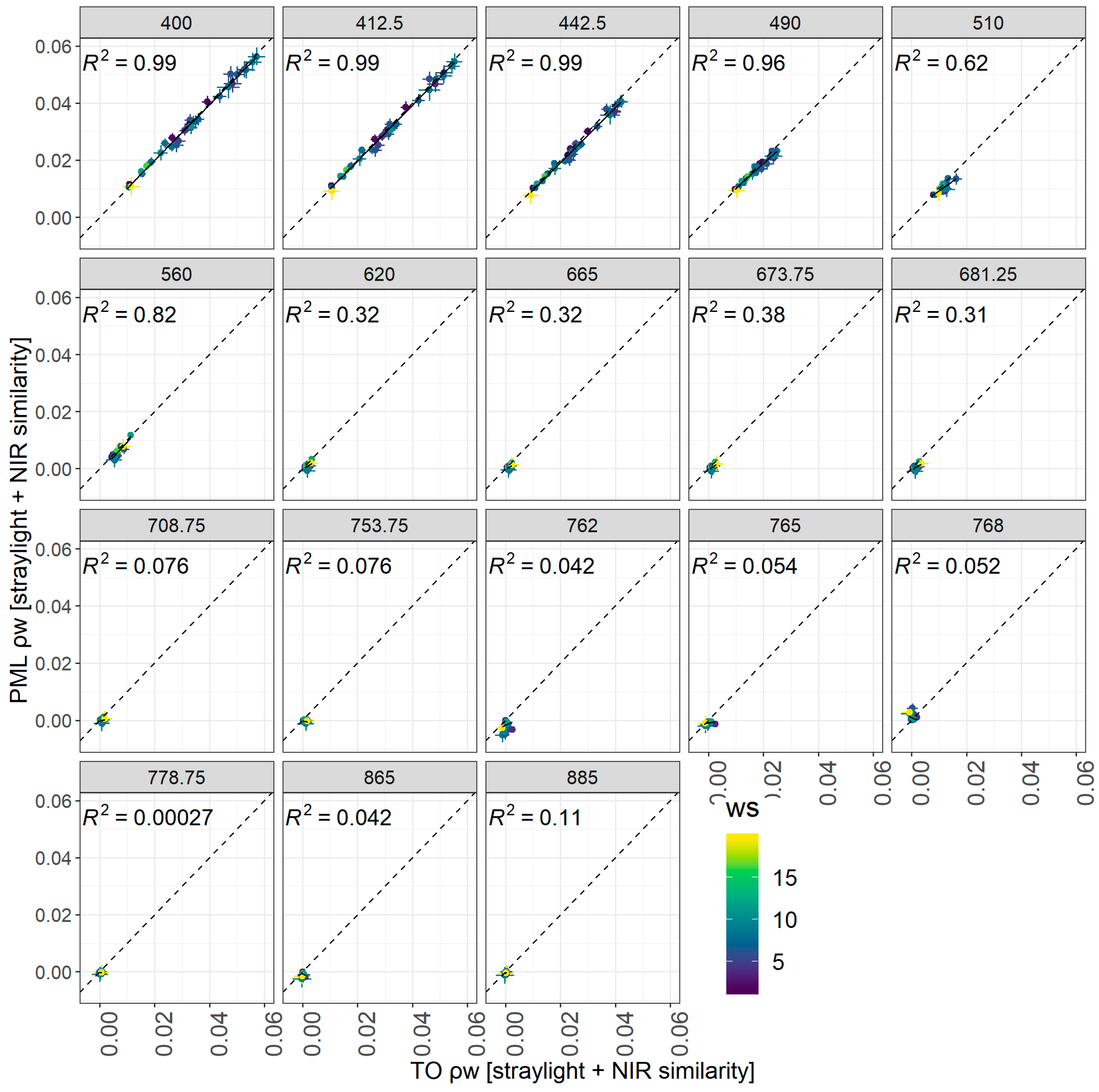
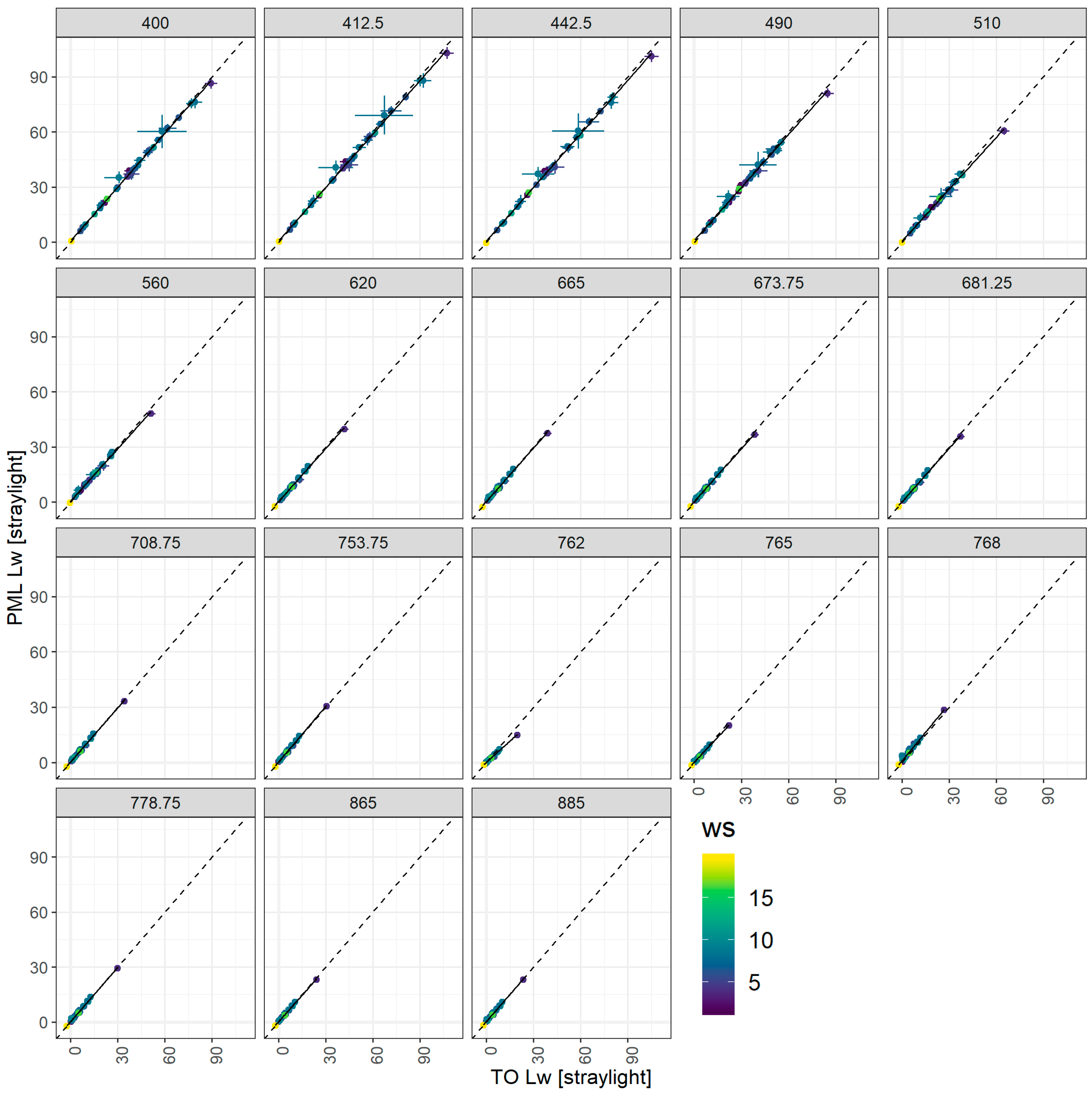
3.2. Comparison Between the In Situ Radiometric Systems
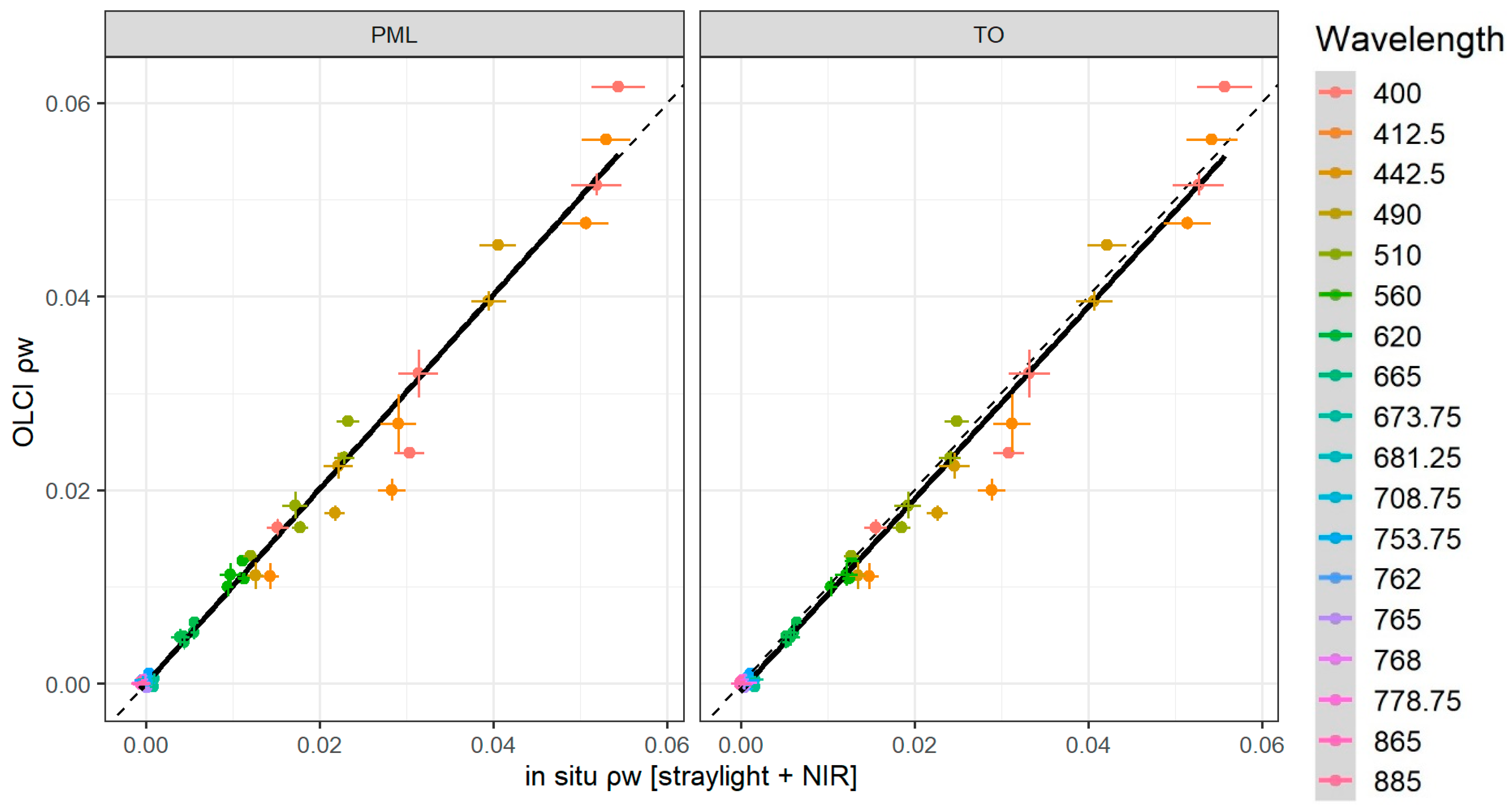
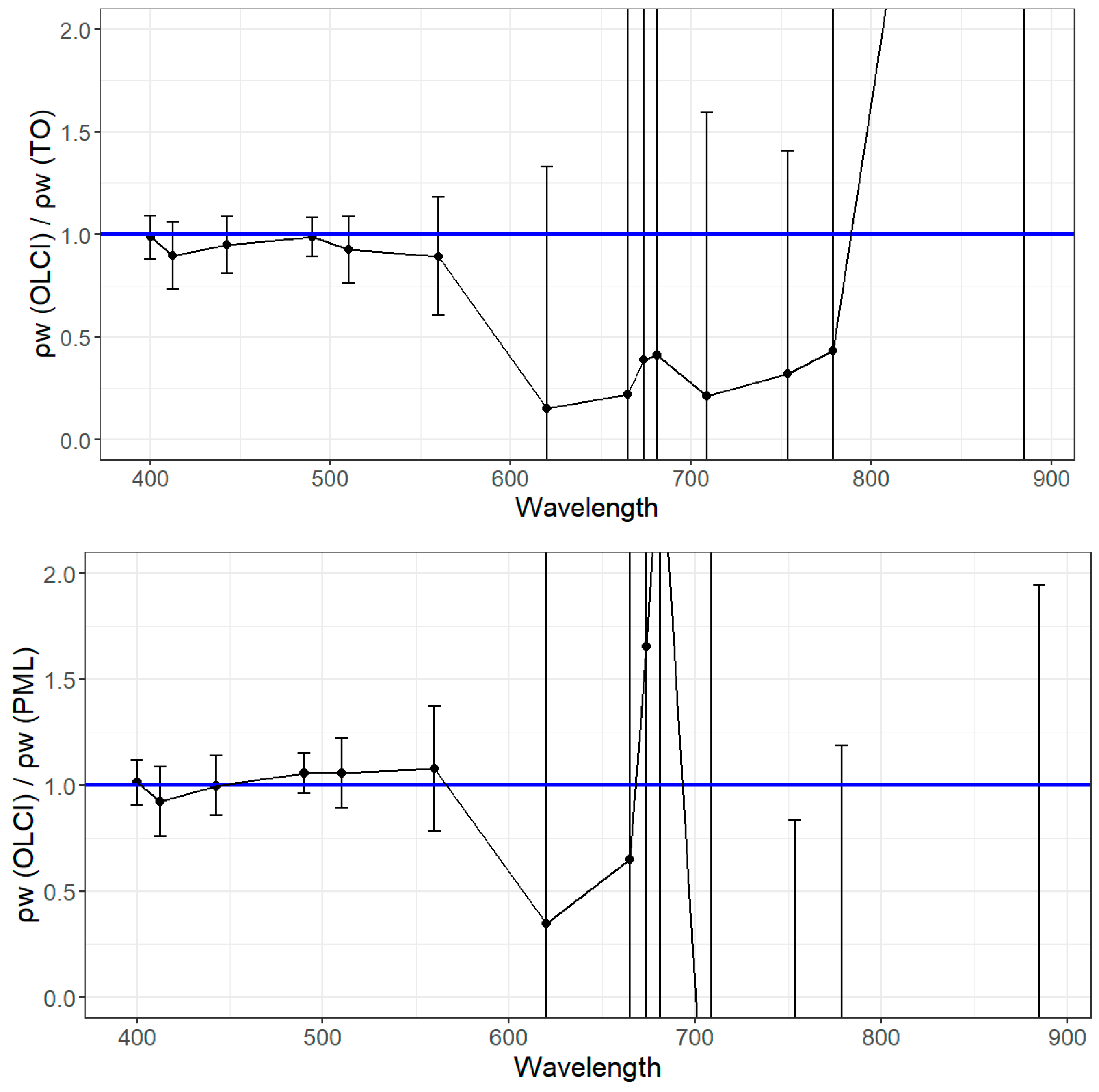
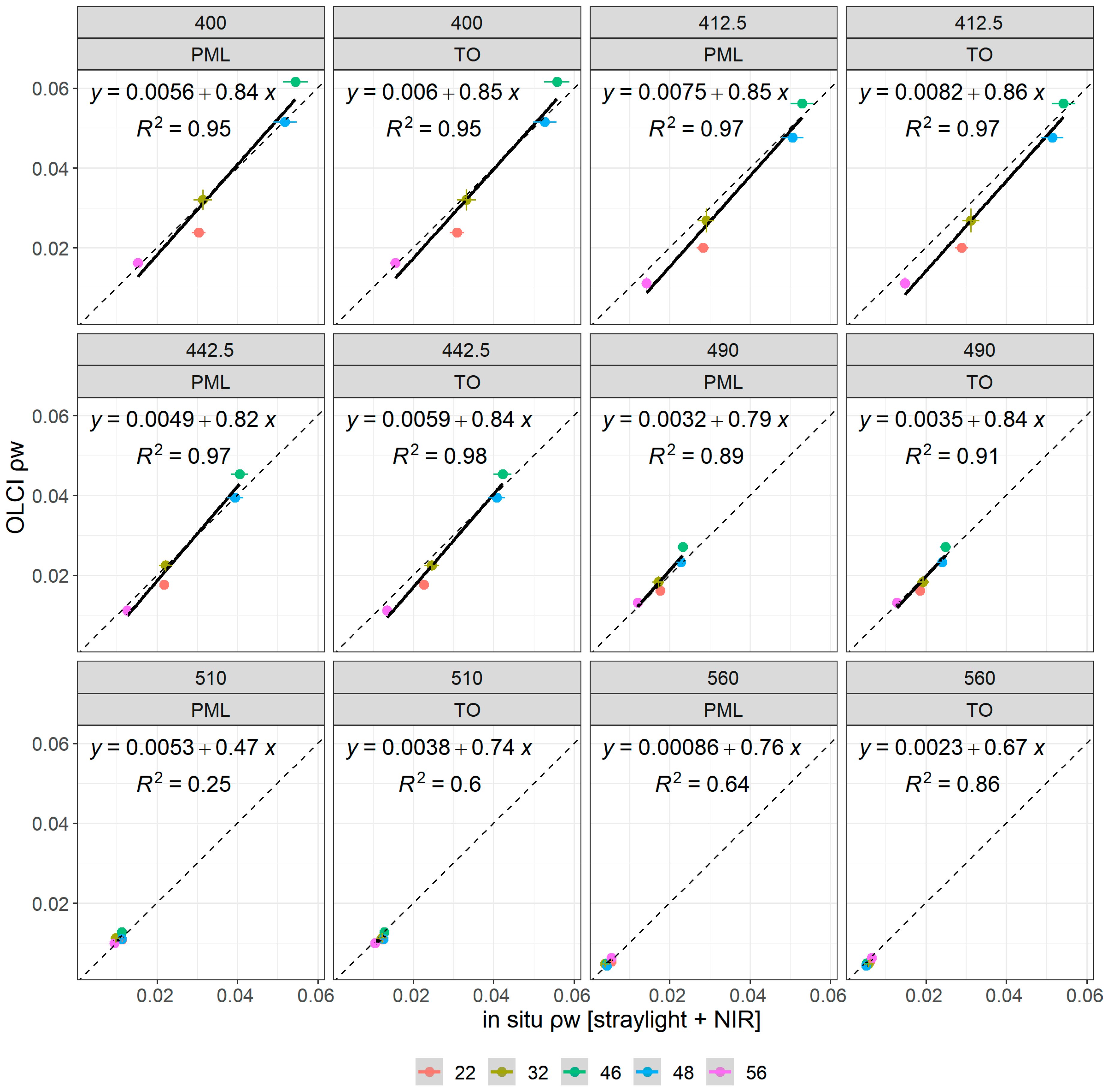
3.3. Consistency between In Situ and OLCI Radiometric Data
4. Discussion
4.1. Data Filtering Procedure
4.2. Comparison of Radiometric Measurement Systems on a Moving Vessel
4.3. Environmental Effects
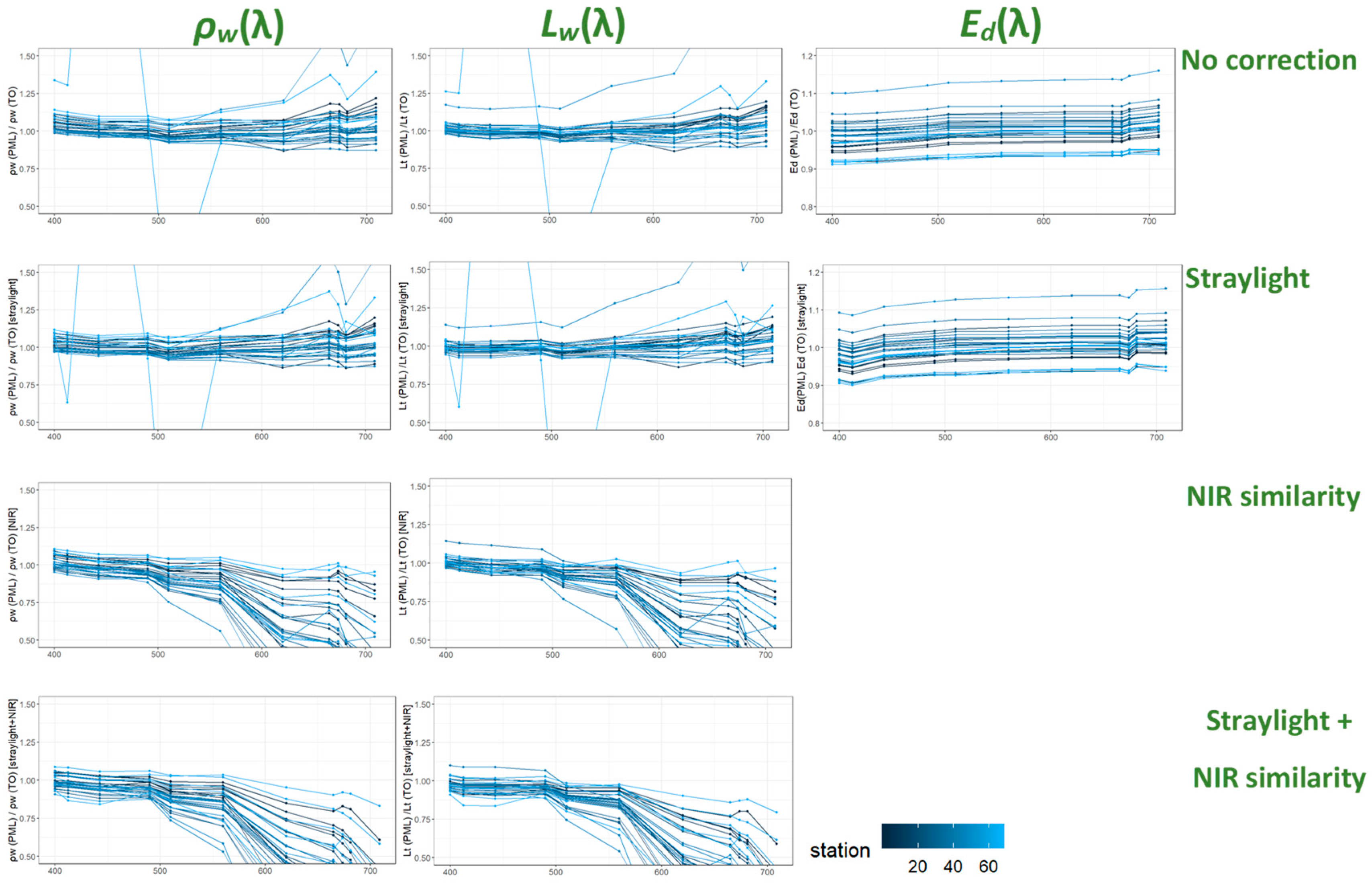
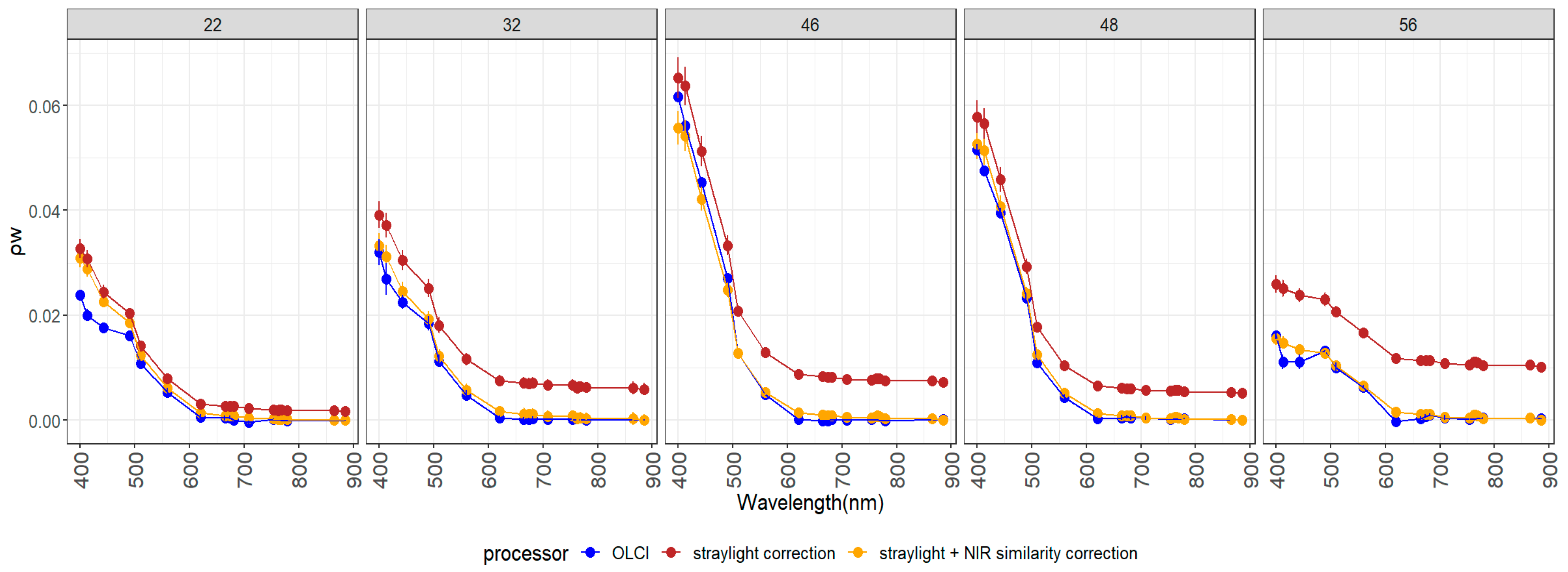
4.4. Comparison of Water-Leaving Reflectance and Radiance Spectra
4.5. Comparison of In Situ and OLCI Radiometric Data
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A







References
- Bailey, S.W.; Hooker, S.B.; Antoine, D.; Franz, B.A.; Werdell, P.J. Sources and assumptions for the vicarious calibration of ocean color satellite observations. Appl. Opt. 2008, 47, 2035–2045. [Google Scholar] [CrossRef]
- Zibordi, G.; Mélin, F.; Voss, K.J.; Johnson, B.C.; Franz, B.A.; Kwiatkowska, E.; Huot, J.P.; Wang, M.; Antoine, D. System vicarious calibration for ocean color climate change applications: Requirements for in situ data. Remote Sens. Environ. 2015, 159, 361–369. [Google Scholar] [CrossRef]
- ESA. Sentinel-3 Mission Requirements Document (MRD), EOPSMO/1151/MD-md; ESA: Paris, France, 2007. [Google Scholar]
- Ruddick, K. Technical Report TR-2 „A Review of Commonly used Fiducial Reference Measurement (FRM) Ocean Colour Radiometers (OCR) used for Satellite OCR Validation” 2018. Available online: https://frm4soc.org/wp-content/uploads/filebase/FRM4SOC-TR2_TO_signedESA.pdf (accessed on 21 May 2020).
- Kuusk, J.; Ansko, I.; Vabson, V.; Ligi, M.; Vendt, R. Protocols and Procedures to Verify the Performance of Fiducial Reference Measurement (FRM) Field Ocean Colour Radiometers (OCR) Used for Satellite Validation; Technical Report TR-5; Tartu Observatory: Tõravere, Estonia, 2017. [Google Scholar]
- Ruddick, K.G.; Voss, K.; Boss, E.; Castagna, A.; Frouin, R.; Gilerson, A.; Hieronymi, M.; Johnson, B.C.; Kuusk, J.; Lee, Z.; et al. A Review of Protocols for Fiducial Reference Measurements of Downwelling Irradiance for the Validation of Satellite Remote Sensing Data over Water. Remote Sens. 2019, 11, 1742. [Google Scholar] [CrossRef] [Green Version]
- Ruddick, K.G.; Voss, K.; Boss, E.; Castagna, A.; Frouin, R.; Gilerson, A.; Hieronymi, M.; Johnson, B.C.; Kuusk, J.; Lee, Z.; et al. A Review of Protocols for Fiducial Reference Measurements of Water-Leaving Radiance for Validation of Satellite Remote-Sensing Data over Water. Remote Sens. 2019, 11, 2198. [Google Scholar] [CrossRef] [Green Version]
- Białek, A.; Douglas, S.; Kuusk, J.; Ansko, I.; Vabson, V.; Vendt, R. Example of Monte Carlo Method Uncertainty Evaluation for Above-Water Ocean Colour Radiometry. Remote Sens. 2020, 12, 780. [Google Scholar] [CrossRef] [Green Version]
- Białek, A.; Goodman, T.; Woolliams, E.; Brachmann, J.F.S.; Schwarzmaier, T.; Kuusk, J.; Ansko, I.; Vabson, V.; Lau, I.C.; MacLellan, C.; et al. Results from Verification of Reference Irradiance and Radiance Sources Laboratory Calibration Experiment Campaign. Remote Sens. 2020, in press. [Google Scholar]
- Vabson, V.; Kuusk, J.; Ansko, I.; Vendt, R.; Alikas, K.; Ruddick, K.; Ansper, A.; Bresciani, M.; Burmester, H.; Costa, M.; et al. Laboratory Intercomparison of Radiometers Used for Satellite Validation in the 400–900 nm Range. Remote Sens. 2019, 11, 1101. [Google Scholar] [CrossRef] [Green Version]
- Vabson, V.; Kuusk, J.; Ansko, I.; Vendt, R.; Alikas, K.; Ruddick, K.; Ansper, A.; Bresciani, M.; Burmester, H.; Costa, M.; et al. Field Intercomparison of Radiometers Used for Satellite Validation in the 400–900 nm Range. Remote Sens. 2019, 11, 1129. [Google Scholar] [CrossRef] [Green Version]
- Tilstone, G.; Dall’Olmo, G.; Hieronymi, M.; Ruddick, K.; Beck, M.; Ligi, M.; Costa, M.; D’Alimonte, D.; Vellucci, V.; Vansteenwegen, D.; et al. Field intercomparison of radiometer measurements for ocean colour validation. Remote Sens. 2020, 12, 1587. [Google Scholar] [CrossRef]
- Morel, A.; Prieur, L. Analysis of variations in ocean color1. Limnol. Oceanogr. 1977, 22, 709–722. [Google Scholar] [CrossRef]
- Organelli, E.; Dall’Olmo, G.; Brewin, R.J.W.; Tarran, G.A.; Boss, E.; Bricaud, A. The open-ocean missing backscattering is in the structural complexity of particles. Nat. Commun. 2018, 9, 1–11. [Google Scholar] [CrossRef]
- Sea-Bird Scientific. Specifications for HyperOCR Radiometer. Available online: https://www.seabird.com/hyperspectral-radiometers/hyperocr-radiometer/family?productCategoryId=54627869935 (accessed on 31 January 2019).
- TriOS. RAMSES Technische Spezifikationen. TriOS Mess- und Datentechnik. Available online: https://www.trios.de/ramses.html (accessed on 31 January 2019).
- Spectral Response Function Data. Available online: https://sentinel.esa.int/web/sentinel/technical-guides/sentinel-3-olci/olci-instrument/spectral-response-function-data (accessed on 3 September 2018).
- Slaper, H.; Reinen, H.A.J.M.; Blumthaler, M.; Huber, M.; Kuik, F. Comparing ground-level spectrally resolved solar UV measurements using various instruments: A technique resolving effects of wavelength shift and slit width. Geophys. Res. Lett. 1995, 22, 2721–2724. [Google Scholar] [CrossRef]
- JCGM 100, Evaluation of Measurement Data—Guide to the Expression of Uncertainty in Measurement (GUM), 1st ed.; JCGM, September 2008; Available online: http://www.bipm.org/utils/common/documents/jcgm/JCGM_100_2008_E.pdf. (accessed on 20 March 2020).
- Alikas, K.; Ansko, I.; Vabson, V.; Ansper, A.; Kangro, K.; Uudeberg, K.; Ligi, M. Consistency of Radiometric Satellite Data over Lakes and Coastal Waters with Local Field Measurements. Remote Sens. 2020, 12, 616. [Google Scholar] [CrossRef] [Green Version]
- Santer, B.D.; Wigley, T.M.L.; Boyle, J.S.; Gaffen, D.J.; Hnilo, J.J.; Nychka, D.; Parker, D.E.; Taylor, K.E. Statistical significance of trends and trend differences in layer-average atmospheric temperature time series. J. Geophys. Res. Atmos. 2000, 105, 7337–7356. [Google Scholar] [CrossRef]
- ISO/IEC 17043:2010. Conformity Assessment—General Requirements for Proficiency Testing; ISO: Geneva, Switzerland, 2010. [Google Scholar]
- Tilstone, G.H.; Moore, G.F.; Sørensen, K.; Doerfeer, R.; Røttgers, R.; Ruddick, K.D.; Pasterkamp, R.; Jørgensen, P.V. Regional Validation of MERIS Chlorophyll Products in North Sea Coastal Waters: REVAMP Protocols; Presented at the ENVISAT Validation Workshop; ESA: Frascatti, Italy, 2004. [Google Scholar]
- Mueller, J.L.; Davis, C.; Arnone, R.; Frouin, R.; Carder, K.; Lee, Z.P.; Steward, R.G.; Hooker, S.; Mobley, C.D.; McLean, S. Above-Water Radiance and Remote Sensing Reflectance Measurement and Analysis Protocols. In Ocean Optics Protocols for Satellite Ocean Color Sensor Validation, Revision 2; NASA/TM-2000-209966; Goddard Space Flight Space Center: Greenbelt, MD, USA, 2000. [Google Scholar]
- Ruddick, K.; de Cauwer, V.; van Mol, B. Use of the near infrared similarity reflectance spectrum for the quality control of remote sensing data. Remote Sens. Coast. Ocean. Environ. 2005, 5885, 588501. [Google Scholar] [CrossRef]
- Ruddick, K.G.; de Cauwer, V.; Park, Y.-J.; Moore, G. Seaborne measurements of near infrared water-leaving reflectance: The similarity spectrum for turbid waters. Limnol. Oceanogr. 2006, 51, 1167–1179. [Google Scholar] [CrossRef] [Green Version]
- EUMETSAT. Recommendations for Sentinel-3 OLCI Ocean Colour Product Validations in Comparison with in situ Measurements—Matchup Protocols; User Guide EUM/SEN3/DOC/19/1092968; EUMETSAT: Darmstadt, Germany, 2019. [Google Scholar]
- Barlow, R.G.; Cummings, D.; Gibb, S.W. Improved resolution of mono- and divinyl chlorophylls a and b and zeaxanthin and lutein in phytoplankton extracts using reverse phase C-8 HPLC. Mar. Ecol. Prog. Ser. 1997, 161, 303–307. [Google Scholar] [CrossRef]
- Dall’Olmo, G.; Westberry, T.K.; Behrenfeld, M.J.; Boss, E.; Slade, W.H. Significant contribution of large particles to optical backscattering in the open ocean. Biogeosciences 2009, 6, 947–967. [Google Scholar] [CrossRef] [Green Version]
- Zibordi, G.; Ruddick, K.; Ansko, I.; Moore, G.; Kratzer, S.; Icely, J.; Reinart, A. In situ determination of the remote sensing reflectance: An inter-comparison. Ocean Sci. 2012, 8, 567–586. [Google Scholar] [CrossRef] [Green Version]
- Kowalczuk, P.; Durako, M.J.; Cooper, W.J.; Wells, D.; Souza, J.J. Comparison of radiometric quantities measured in water, above water and derived from seaWiFS imagery in the South Atlantic Bight, North Carolina, USA. Cont. Shelf Res. 2006, 26, 2433–2453. [Google Scholar] [CrossRef]
- Brewin, R.J.W.; Dall’Olmo, G.; Pardo, S.; van Dongen-Vogels, V.; Boss, E.S. Underway spectrophotometry along the Atlantic Meridional Transect reveals high performance in satellite chlorophyll retrievals. Remote Sens. Environ. 2016, 183, 82–97. [Google Scholar] [CrossRef] [Green Version]
- Lee, Z.; Ahn, Y.-H.; Mobley, C.; Arnone, R. Removal of surface-reflected light for the measurement of remote-sensing reflectance from an above-surface platform. Opt. Express 2010, 18, 26313–26324. [Google Scholar] [CrossRef] [PubMed]
- Hooker, S.B.; Lazin, G.; Zibordi, G.; McLean, S. An Evaluation of Above- and In-Water Methods for Determining Water-Leaving Radiances. J. Atmos. Ocean. Technol. 2002, 19, 486–515. [Google Scholar] [CrossRef]
- Zibordi, G.; Talone, M.; Jankowski, L. Response to Temperature of a Class of In Situ Hyperspectral Radiometers. J. Atmos. Ocean. Technol. 2017, 34, 1795–1805. [Google Scholar] [CrossRef]
- Talone, M.; Zibordi, G.; Ansko, I.; Banks, A.C.; Kuusk, J. Stray light effects in above-water remote-sensing reflectance from hyperspectral radiometers. Appl. Opt. 2016, 55, 3966–3977. [Google Scholar] [CrossRef] [PubMed]
- EUMETSAT. Sentinel-3 OLCI Marine User Handbook, v1H e-Signed; EUMETSAT: Darmstadt, Germany, 2018. [Google Scholar]
- Li, J.; Jamet, C.; Zhu, J.; Han, B.; Li, T.; Yang, A.; Guo, K.; Jia, D. Error Budget in the Validation of Radiometric Products Derived from OLCI around the China Sea from Open Ocean to Coastal Waters Compared with MODIS and VIIRS. Remote Sens. 2019, 11, 2400. [Google Scholar] [CrossRef] [Green Version]
- Zibordi, G.; Mélin, F.; Berthon, J.-F. A Regional Assessment of OLCI Data Products. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1490–1494. [Google Scholar] [CrossRef]
- EUMETSAT Mission Management. Sentinel-3 Product Notice—OLCI Level-2 Ocean Colour, v1; EUMETSAT: Darmstadt, Germany, 2019. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Station Id | Date | Latitude (Degree) | Longitude (Degree) | Sun Zenith Angle (Degree) | Wind Speed (W, m·s−1) | Temperature (t, °C) |
|---|---|---|---|---|---|---|---|
| 1 | 1 | 24.09.2017 | 48.9 | −7.6 | 52.37 | 1.48 | 16.2 |
| 2 | 3 | 25.09.2017 | 46.7 | −12.0 | 51.52 | 7.23 | 17.3 |
| 3 | 6 | 27.09.2017 | 42.2 | −18.8 | 46.31 | 2.24 | 19.3 |
| 4 | 8 | 28.09.2017 | 39.4 | −22.7 | 45.31 | 5.94 | 23.0 |
| 5 | 10 | 30.09.2017 | 35.1 | −26.3 | 38.87 | 1.69 | 24.3 |
| 6 | 12 | 01.10.2017 | 31.8 | −27.2 | 35.84 | 5.69 | 23.5 |
| 7 | 16 | 03.10.2017 | 25.7 | −28.7 | 30.52 | 7.15 | 24.5 |
| 8 | 18 | 04.10.2017 | 22.3 | −29.5 | 28.58 | 1.69 | 25.7 |
| 9 | 20 | 05.10.2017 | 18.8 | −29.7 | 26.4 | 5.47 | 26.6 |
| 10 | 22 | 06.10.2017 | 15.5 | −28.8 | 23.21 | 4.31 | 27.8 |
| 11 | 24 | 07.10.2017 | 12.8 | −28.2 | 20.4 | 8.43 | 28.0 |
| 12 | 26 | 08.10.2017 | 9.9 | −27.4 | 18.38 | 6.89 | 28.3 |
| 13 | 28 | 09.10.2017 | 6.9 | −26.7 | 15.41 | 5.13 | 27.6 |
| 14 | 32 | 11.10.2017 | 1.5 | −25.4 | 10.42 | 6.34 | 26.0 |
| 15 | 34 | 12.10.2017 | −1.8 | −25.0 | 8.23 | 8.44 | 25.9 |
| 16 | 36 | 13.10.2017 | −4.6 | −25.0 | 6.07 | 10.74 | 25.7 |
| 17 | 38 | 14.10.2017 | −7.1 | −25.0 | 5.84 | 6.8 | 25.5 |
| 18 | 40 | 15.10.2017 | −10.5 | −25.1 | 5.93 | 6.63 | 25.1 |
| 19 | 42 | 16.10.2017 | −13.7 | −25.1 | 7.85 | 8.12 | 23.8 |
| 20 | 43 | 17.10.2017 | −16.0 | −25.1 | 8.22 | 8.07 | 22.9 |
| 21 | 46 | 19.10.2017 | −21.8 | −25.1 | 13 | 8.76 | 21.7 |
| 22 | 48 | 20.10.2017 | −25.1 | −25.0 | 15.56 | 6.26 | 21.2 |
| 23 | 50 | 21.10.2017 | −27.9 | −25.2 | 17.78 | 3.88 | 20.7 |
| 24 | 52 | 22.10.2017 | −31.3 | −26.2 | 21.22 | 8.74 | 19.4 |
| 25 | 54 | 23.10.2017 | −33.9 | −27.1 | 26.05 | 6.17 | 17.3 |
| 26 | 56 | 24.10.2017 | −37.0 | −28.3 | 28.62 | 8.12 | 15.8 |
| 27 | 59 | 26.10.2017 | −42.1 | −30.4 | 34.22 | 7.92 | 10.0 |
| 28 | 61 | 27.10.2017 | −45.2 | −31.7 | 36.15 | 16.25 | 8.8 |
| 29 | 62 | 28.10.2017 | −47.1 | −32.6 | 54.53 | 8.03 | 6.4 |
| 30 | 64 | 29.10.2017 | −50.4 | −34.2 | 40.23 | 11.63 | 1.6 |
| 31 | 66 | 30.10.2017 | −52.9 | −35.7 | 43.25 | 9.25 | 0.9 |
| 32 | 67 | 01.11.2017 | −53.7 | −38.1 | 60.54 | 19.71 | 2.0 |
| Parameter | RAMSES | HyperOCR |
|---|---|---|
| Field of View (L/E) | 7°/cos | 6°/cos |
| Adaptive integration time | Yes | yes |
| Min. integration time, ms | 4 | 4 |
| Max. integration time, ms | 4096 | 4096 |
| Min. sampling interval, s | 1 | 0.5 |
| Recording dark signal | Opaque pixels | Internal shutter |
| Number of channels | 256 | 256 |
| Wavelength range, nm | 320…1050 | 320…1050 |
| Wavelength step, nm | 3.3 | 3.3 |
| Spectral resolution, nm | 10 | 10 |
| MAPD (%) | MPD (%) | Mean Uncertainty of In Situ ρw (%) | ||||
|---|---|---|---|---|---|---|
| Band | TO | PML | TO | PML | TO | PML |
| 400 | 9 | 9 | 3 | 0 | 6 | 6 |
| 412.5 | 16 | 14 | 15 | 12 | 6 | 6 |
| 442.5 | 12 | 9 | 9 | 3 | 6 | 6 |
| 490 | 7 | 9 | 2 | −5 | 6 | 6 |
| 510 | 7 | 8 | 7 | −6 | 7 | 7 |
| 560 | 11 | 10 | 11 | −8 | 10 | 12 |
| 620 | 84 | 178 | 84 | −53 | 30 | >50 |
| 665 | 77 | 117 | 77 | 109 | 40 | >50 |
| 673.75 | 61 | 102 | 61 | 31 | 42 | >50 |
| 681.25 | 62 | 123 | 62 | −9 | 41 | >50 |
| 708.75 | 84 | 1411 | 84 | −903 | >50 | >50 |
| 753.75 | 60 | 156 | 60 | 156 | >50 | >50 |
| 778.75 | 110 | 143 | 62 | 143 | >50 | >50 |
| 885 | 145 | 116 | −72 | 116 | >50 | >50 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alikas, K.; Vabson, V.; Ansko, I.; Tilstone, G.H.; Dall’Olmo, G.; Nencioli, F.; Vendt, R.; Donlon, C.; Casal, T. Comparison of Above-Water Seabird and TriOS Radiometers along an Atlantic Meridional Transect. Remote Sens. 2020, 12, 1669. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12101669
Alikas K, Vabson V, Ansko I, Tilstone GH, Dall’Olmo G, Nencioli F, Vendt R, Donlon C, Casal T. Comparison of Above-Water Seabird and TriOS Radiometers along an Atlantic Meridional Transect. Remote Sensing. 2020; 12(10):1669. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12101669
Chicago/Turabian StyleAlikas, Krista, Viktor Vabson, Ilmar Ansko, Gavin H. Tilstone, Giorgio Dall’Olmo, Francesco Nencioli, Riho Vendt, Craig Donlon, and Tania Casal. 2020. "Comparison of Above-Water Seabird and TriOS Radiometers along an Atlantic Meridional Transect" Remote Sensing 12, no. 10: 1669. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12101669