Remote Detection of Moisture and Bio-Deterioration of Building Walls by Time-Of-Flight and Phase-Shift Terrestrial Laser Scanners

 ,
, 
 , and
, and
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Theoretical Background of Laser Measurements
3. Object Descriptions and Sampling by TLSs
4. Results and Data Post-Processing
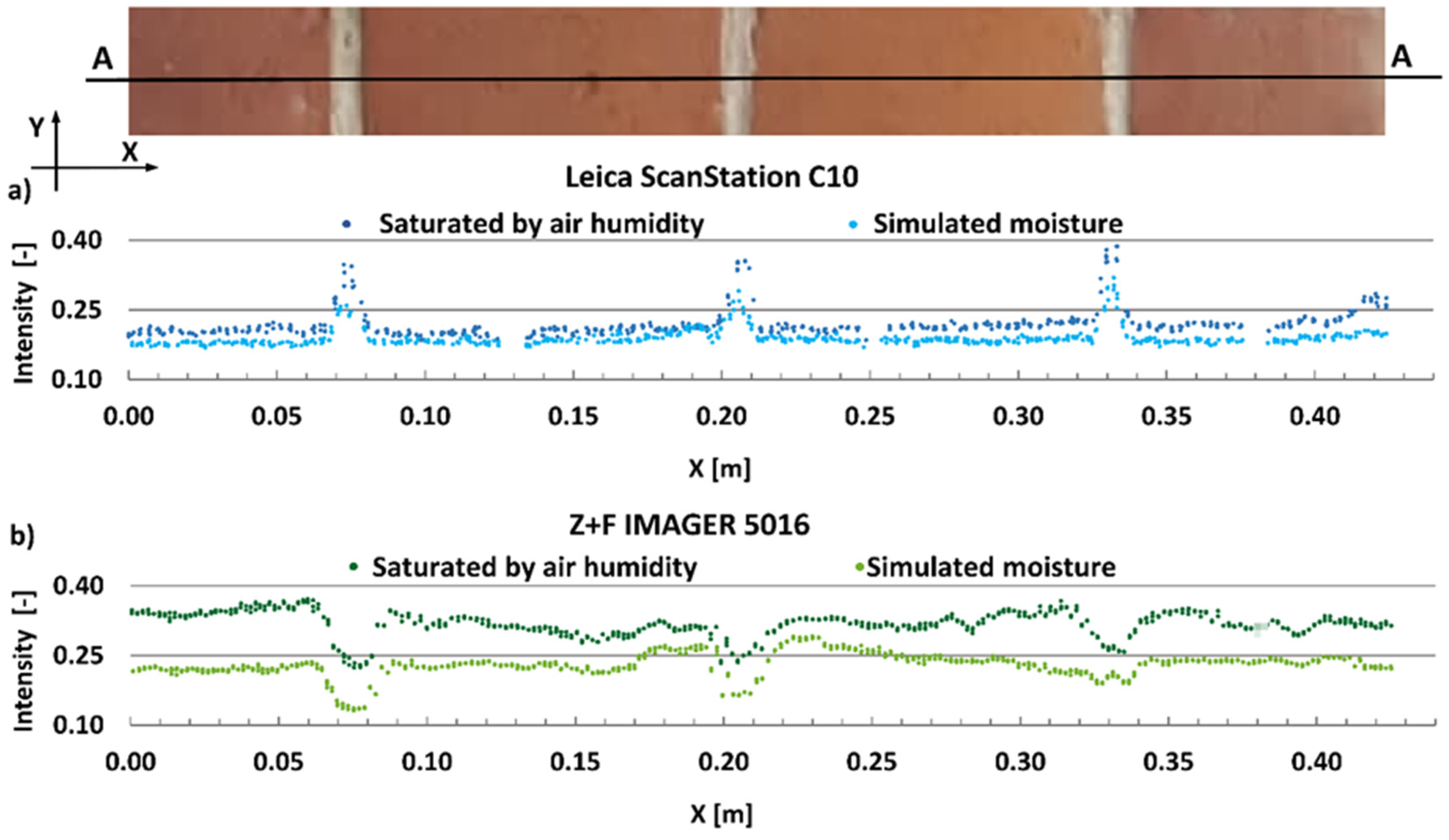
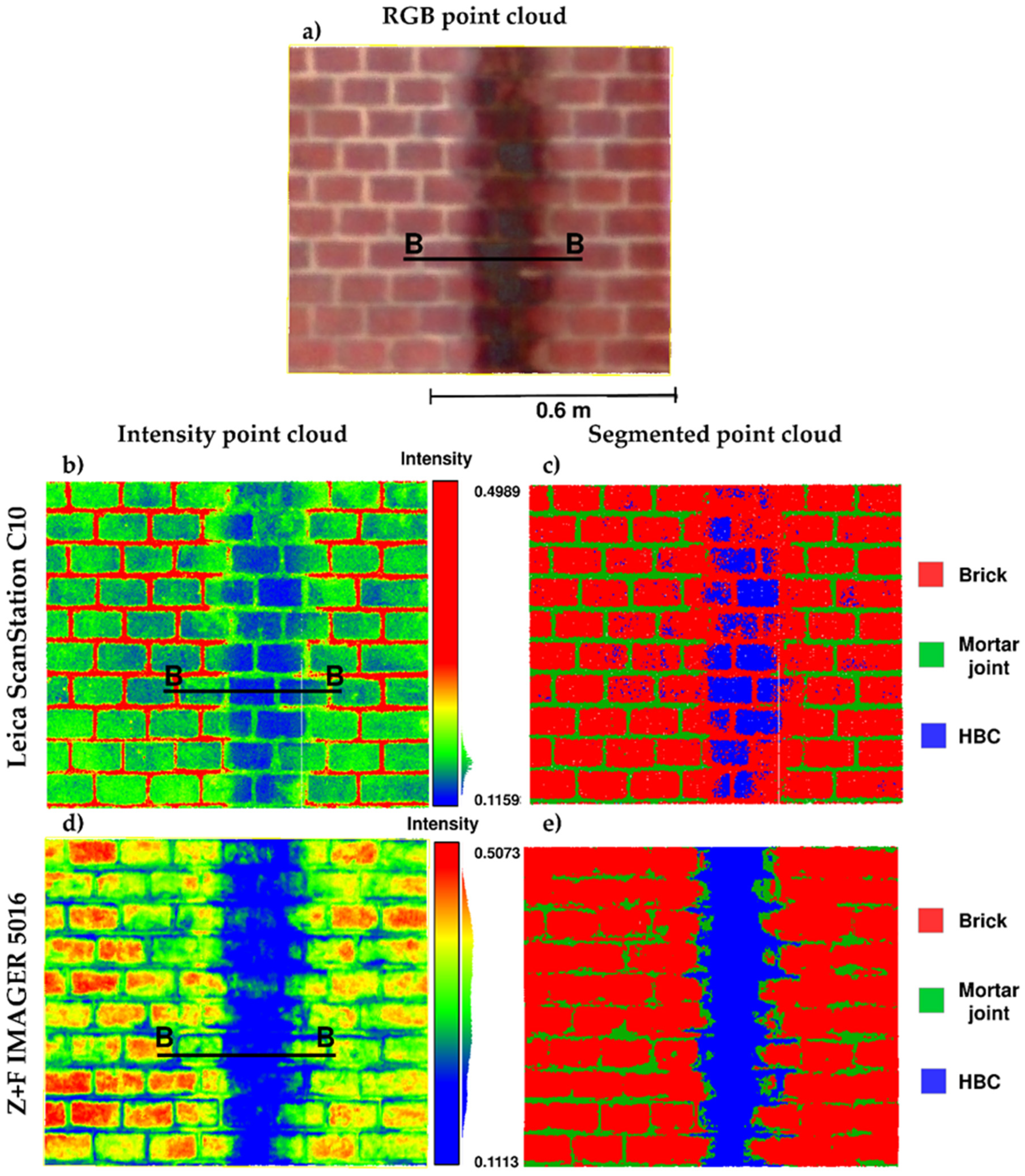
4.1. Analysis of Wall Saturation and Its Changes
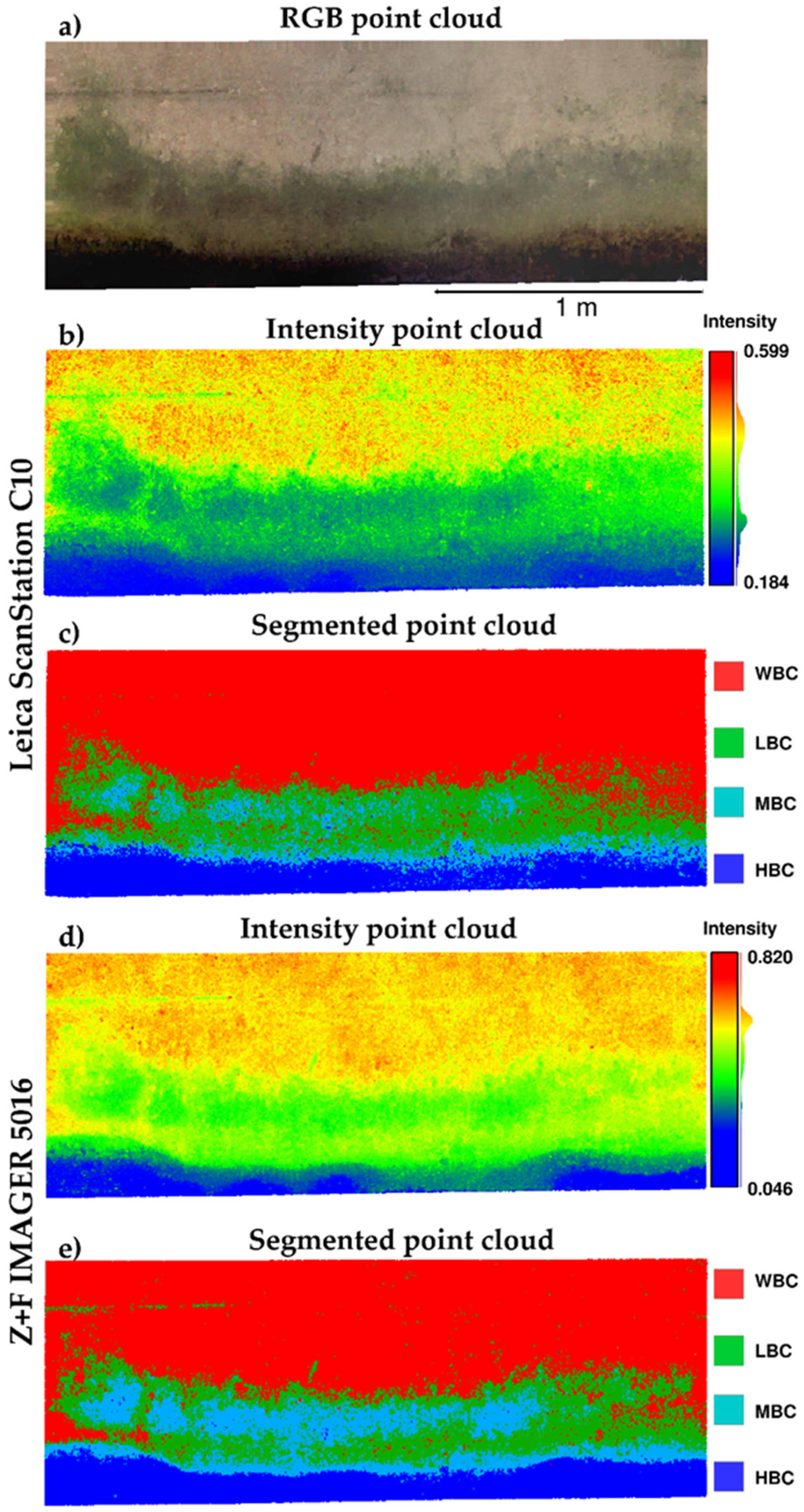
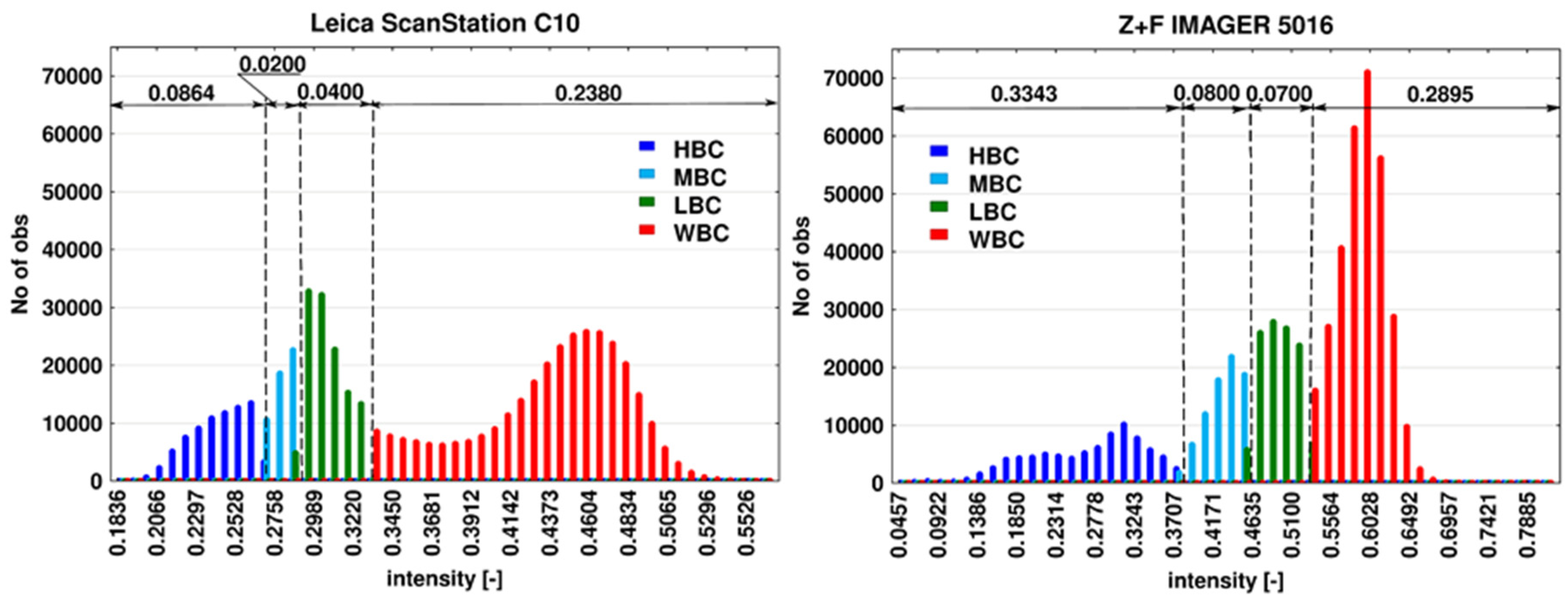
4.2. Analysis of Wall Biological Corrosion and Its Change
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gonzalez-Jorge, H.; Solla, M.; Armesto, J.; Arias, P. Novel method to determine laser scanner accuracy for applications in civil engineering. Opt. Appl. 2012, XLII, 43–53. [Google Scholar] [CrossRef]
- Lenda, G.; Uznański, A.; Strach, M.; Lewińska, P. Laser Scanning in Engineering Surveying: Methods of Measurement and Modeling of Structures. Rep. Geod. Geoinformatics 2016, 100, 109–130. [Google Scholar] [CrossRef] [Green Version]
- Del-Campo-Sanchez, A.; Moreno, M.; Ballesteros, R.; Hernandez-Lopez, D. Geometric characterization of vines from 3D point clouds obtained with laser scanner systems. Remote Sens. 2019, 11, 2365. [Google Scholar] [CrossRef] [Green Version]
- Suchocki, C.; Damięcka, M.; Jagoda, M. Determination of the building wall deviations from the vertical plane. In Proceedings of the 7th International Conference on Environmental Engineering, ICEE 2008, Vilnius, Lithuania, 23 May 2008; pp. 1488–1492. [Google Scholar]
- Corso, J.; Roca, J.; Buill, F. Geometric analysis on stone façades with terrestrial laser scanner technology. Geosci. 2017, 7, 103. [Google Scholar] [CrossRef] [Green Version]
- Xiong, X.; Adan, A.; Akinci, B.; Huber, D. Automatic creation of semantically rich 3D building models from laser scanner data. Autom. Constr. 2013, 31, 325–337. [Google Scholar] [CrossRef] [Green Version]
- Mistretta, F.; Sanna, G.; Stochino, F.; Vacca, G. Structure from motion point clouds for structural monitoring. Remote Sens. 2019, 11, 1940. [Google Scholar] [CrossRef] [Green Version]
- Kermarrec, G.; Kargoll, B.; Alkhatib, H. Deformation analysis using B-spline surface with correlated terrestrial laser scanner observations-a bridge under load. Remote Sens. 2020, 12, 829. [Google Scholar] [CrossRef] [Green Version]
- Ossowski, R.; Przyborski, M.; Tysiac, P. Stability Assessment of Coastal Cliffs Incorporating Laser Scanning Technology and a Numerical Analysis. Remote Sens. 2019, 11, 1951. [Google Scholar] [CrossRef] [Green Version]
- Suchocki, C. Application of terrestrial laser scanner in cliff shores monitoring. Rocz. Ochr. Sr. 2009, 11, 715–725. [Google Scholar]
- Rabah, M.; Elhattab, A.; Fayad, A. Automatic concrete cracks detection and mapping of terrestrial laser scan data. Nriag J. Astron. Geophys. 2013, 2, 250–255. [Google Scholar] [CrossRef] [Green Version]
- Armesto-González, J.; Riveiro-Rodríguez, B.; González-Aguilera, D.; Rivas-Brea, M.T. Terrestrial laser scanning intensity data applied to damage detection for historical buildings. J. Archaeol. Sci. 2010, 37, 3037–3047. [Google Scholar] [CrossRef]
- Suchocki, C.; Błaszczak-Bąk, W. Down-Sampling of Point Clouds for the Technical Diagnostics of Buildings and Structures. Geosciences 2019, 9, 70. [Google Scholar] [CrossRef] [Green Version]
- Tan, K.; Cheng, X.; Ju, Q.; Wu, S. Correction of Mobile TLS Intensity Data for Water Leakage Spots Detection in Metro Tunnels. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1711–1715. [Google Scholar] [CrossRef]
- Pavi, S.; Gorkos, P.; Bordin, F.; Veronez, M.; Kulakowski, M. Laser scanner in identification of pathological manifestations in concrete. In Multi-Span Large Bridges, Proceedings of the International Conference on Multi-Span Large Bridges, Porto, Portugal, 1–3 July 2015; Taylor & Francis Gropup: Porto, Portugal, 2015; pp. 879–886. [Google Scholar]
- Nowak, R.; Orłowicz, R.; Rutkowski, R. Use of TLS (LiDAR) for building diagnostics with the example of a historic building in Karlino. Buildings 2020, 10, 24. [Google Scholar] [CrossRef] [Green Version]
- Suchocki, C. Comparison of Time-of-Flight and Phase-Shift TLS Intensity Data for the Diagnostics Measurements of Buildings. Mater. (Basel) 2020, 13, 353. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nowak, R.; Orłowicz, R. Testing of Chosen Masonry Arched Lintels. Int. J. Arch. Herit. 2020. [Google Scholar] [CrossRef]
- Viitanen, H.; Vinha, J.; Salminen, K.; Ojanen, T.; Peuhkuri, R.; Paajanen, L.; Lähdesmäki, K. Moisture and bio-deterioration risk of building materials and structures. J. Build. Phys. 2010, 33, 579–594. [Google Scholar] [CrossRef]
- Gaylarde, C.C.; Morton, L.H.G. Deteriogenic biofilms on buildings and their control: A review. Biofouling 1999, 14, 59–74. [Google Scholar] [CrossRef]
- Herrera, L.K.; Borgne, S.L.; Videla, H.A. Modern Methods for Materials Characterization and Surface Analysis to Study the Effects of Biodeterioration and Weathering on Buildings of Cultural Heritage. Int. J. Arch. Herit. 2009, 3, 74–91. [Google Scholar] [CrossRef]
- Cwalina, B. Biodeterioration of concrete, brick and other mineral-based building materials. In Understanding Biocorrosion: Fundamentals and Applications; Silesian University of Technology: Gliwice, Poland, 2014; pp. 281–312, chapter of book; ISBN 9781782421252. [Google Scholar] [CrossRef]
- Wilimzig, M. Bio-deterioration of building materials. In Proceedings of the 8th International Congress on Deterioration and Conservation of Stone, Berlin, Germany, 30 September–4 October 1996; pp. 579–584, ISBN 3000007792. [Google Scholar]
- Gunn, D.A.; Chambers, J.E.; Uhlemann, S.; Wilkinson, P.B.; Meldrum, P.I.; Dijkstra, T.A.; Haslam, E.; Kirkham, M.; Wragg, J.; Holyoake, S.; et al. Moisture monitoring in clay embankments using electrical resistivity tomography. Constr. Build. Mater. 2015, 92, 82–94. [Google Scholar] [CrossRef] [Green Version]
- Piontek, M.; Jasiewicz, M.; Łuszczyńska, K. Thermal modernization and biodeterioration of prefabricated elements of buildings - A case study. In Management of Indoor Air Quality; chapter of book; Taylor & Fracis Group: Oxfordshire, UK, 2011; ISBN 9780415672665. [Google Scholar] [CrossRef]
- Gupta, R.P. Remote Sensing Geology; Springer: Berlin/Heidelberg, Germany, 1991; ISBN 978-3-662-12916-6. [Google Scholar]
- Suchocki, C.; Katzer, J.; Panuś, A. Remote Sensing to Estimate Saturation Differences of Chosen Building Materials Using Terrestrial Laser Scanner. Rep. Geod. Geoinformatics 2017, 103, 94–105. [Google Scholar] [CrossRef] [Green Version]
- Suchocki, C.; Katzer, J. Terrestrial laser scanning harnessed for moisture detection in building materials—Problems and limitations. Autom. Constr. 2018, 94, 127–134. [Google Scholar] [CrossRef]
- Blaskow, R.; Schneider, D. Analysis and correction of the dependency between laser scanner intensity values and range. In International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives; ISPRS Archives: Riva del Garda, Italy, 2014; Volume 40, pp. 107–112. [Google Scholar]
- Xu, T.; Xu, L.; Yang, B.; Li, X.; Yao, J. Terrestrial laser scanning intensity correction by piecewise fitting and overlap-driven adjustment. Remote Sens. 2017, 9, 90. [Google Scholar] [CrossRef] [Green Version]
- Kaasalainen, S.; Jaakkola, A.; Kaasalainen, M.; Krooks, A.; Kukko, A. Analysis of incidence angle and distance effects on terrestrial laser scanner intensity: Search for correction methods. Remote Sens. 2011, 3, 2207–2221. [Google Scholar] [CrossRef] [Green Version]
- Suchocki, C.; Katzer, J.; Rapiński, J. Terrestrial Laser Scanner as a Tool for Assessment of Saturation and Moisture Movement in Building Materials. Period. Polytech. Civ. Eng. 2018, 62, 1406. [Google Scholar] [CrossRef] [Green Version]
- Balaguer-Puig, M.; Molada-Tebar, A.; Marqués-Mateu, A.; Lerma, J.L. Characterisation of intensity values on terrestrial laser scanning for recording enhancement. Isprs—Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W5, 49–55. [Google Scholar] [CrossRef] [Green Version]
- Reshetyuk, Y. Investigation of the Influence of Surface Reflectance on the Measurementswith the Terrestrial Laser Scanner Leica HDS 3000. Z. Für Vermess 2006, 2, 96–103. [Google Scholar]
- Pesci, A.; Teza, G. Effects of surface irregularities on intensity data from laser scanning: An experimental approach. Ann. Geophys. 2008, 51, 839–848. [Google Scholar] [CrossRef]
- San José Alonso, J.I.; Martínez Rubio, J.; Fernández Martín, J.J.; García Fernández, J. Comparing Time-of-Flight and Phase-Shift. The Survey of the Royal Pantheon in the Basilica of San Isidoro (León). Isprs—Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXVIII-5/. [Google Scholar] [CrossRef] [Green Version]
- Tan, K.; Zhang, W.; Shen, F.; Cheng, X. Investigation of TLS intensity data and distance measurement errors from target specular reflections. Remote Sens. 2018, 10, 1077. [Google Scholar] [CrossRef] [Green Version]
- Heesun, Y.; Hajun, S.; Kyihwan, P. A phase-shift laser scanner based on a time-counting method for high linearity performance. Rev. Sci. Instrum. 2011, 8, 075108. [Google Scholar] [CrossRef]
- Bechadergue, B.; Chassagne, L.; Guan, H. Visible light phase-shift rangefinder for platooning applications. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; IEEE: Rio de Janeiro, Brazil, 2016; pp. 1–7. [Google Scholar]
- Höfle, B.; Pfeifer, N. Correction of laser scanning intensity data: Data and model-driven approaches. Isprs J. Photogramm. Remote Sens. 2007, 62, 415–433. [Google Scholar] [CrossRef]
- Tan, K.; Cheng, X. Correction of incidence angle and distance effects on TLS intensity data based on reference targets. Remote Sens. 2016, 8, 251. [Google Scholar] [CrossRef] [Green Version]
- Vain, A.; Kaasalainen, S.; Pyysalo, U.; Krooks, A.; Litkey, P. Use of Naturally Available Reference Targets to Calibrate Airborne Laser Scanning Intensity Data. Sensors 2009, 9, 2780–2796. [Google Scholar] [CrossRef] [PubMed]
- Vain, A.; Xiaowei, Y.; Kaasalainen, S.; Hyyppä, J. Correcting Airborne Laser Scanning Intensity Data for Automatic Gain Control Effect. Geosci. Remote Sens. Lett. IEEE 2010, 7, 511–514. [Google Scholar] [CrossRef]










© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suchocki, C.; Damięcka-Suchocka, M.; Katzer, J.; Janicka, J.; Rapiński, J.; Stałowska, P. Remote Detection of Moisture and Bio-Deterioration of Building Walls by Time-Of-Flight and Phase-Shift Terrestrial Laser Scanners. Remote Sens. 2020, 12, 1708. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12111708
Suchocki C, Damięcka-Suchocka M, Katzer J, Janicka J, Rapiński J, Stałowska P. Remote Detection of Moisture and Bio-Deterioration of Building Walls by Time-Of-Flight and Phase-Shift Terrestrial Laser Scanners. Remote Sensing. 2020; 12(11):1708. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12111708
Chicago/Turabian StyleSuchocki, Czesław, Marzena Damięcka-Suchocka, Jacek Katzer, Joanna Janicka, Jacek Rapiński, and Paulina Stałowska. 2020. "Remote Detection of Moisture and Bio-Deterioration of Building Walls by Time-Of-Flight and Phase-Shift Terrestrial Laser Scanners" Remote Sensing 12, no. 11: 1708. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12111708