First Evidence of Peat Domes in the Congo Basin using LiDAR from a Fixed-Wing Drone

 ,
,  , , , ,
, , , ,
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
2.1. UAV LiDAR
2.2. Peat Depth Field Measurements
2.3. ICESat and ICESat-2
2.4. TanDEM-X
3. Results and Discussion
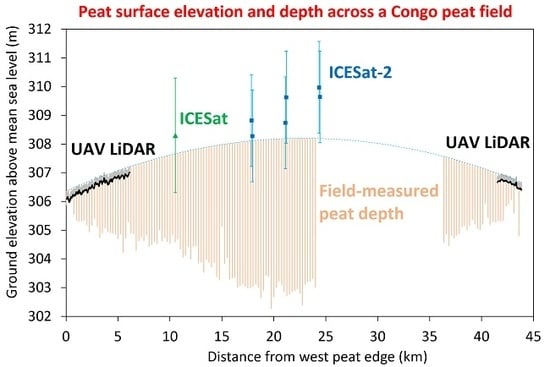
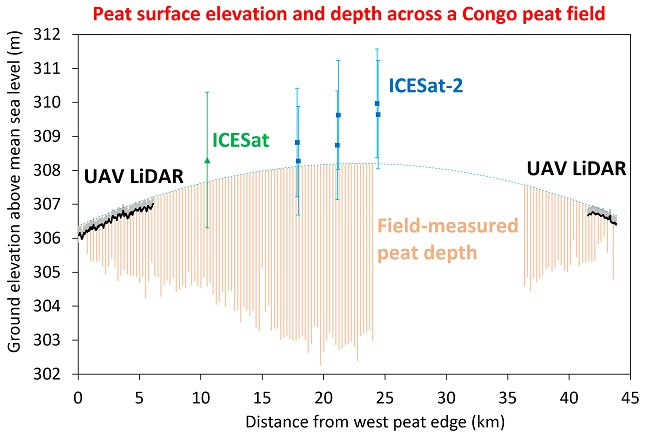
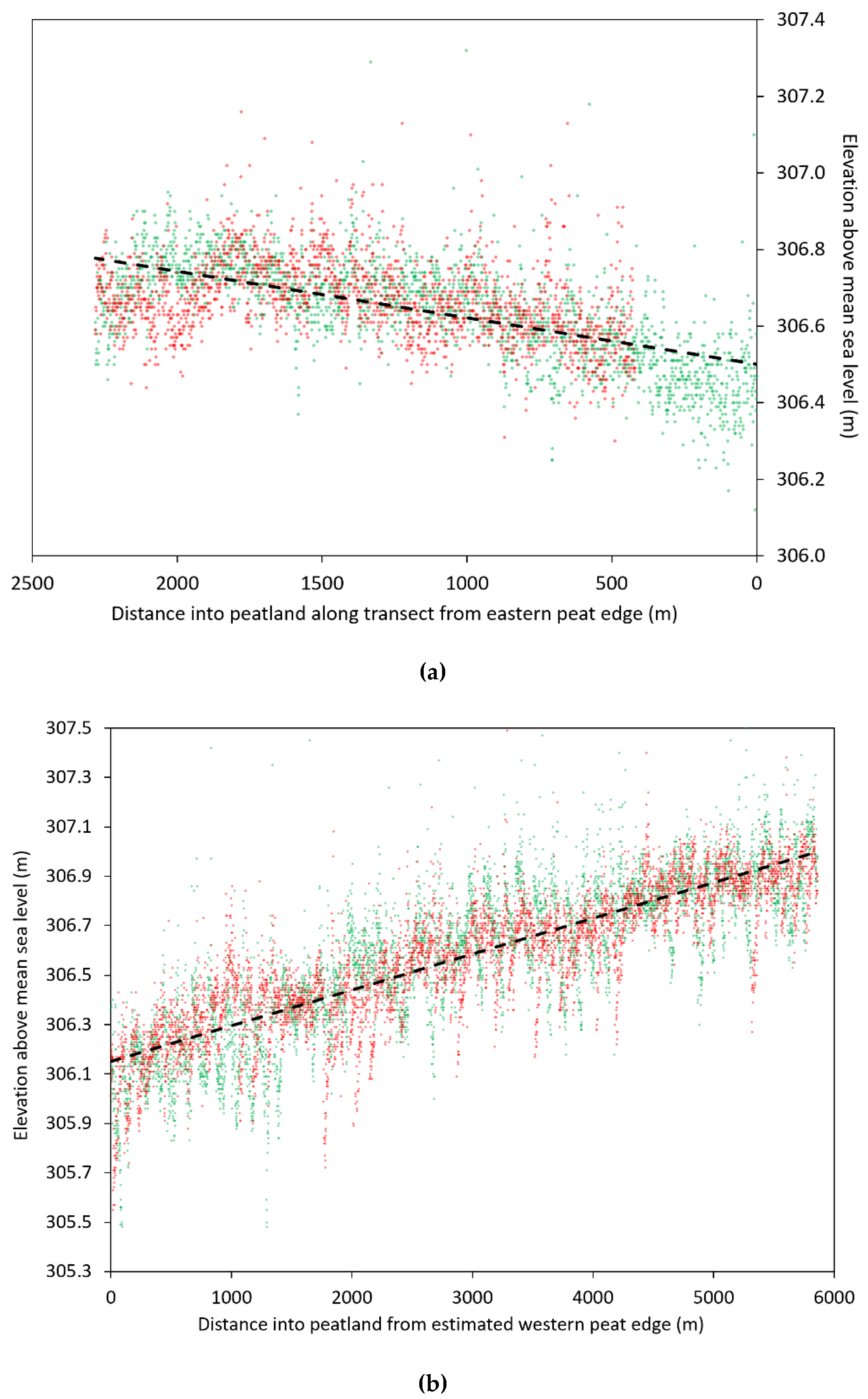
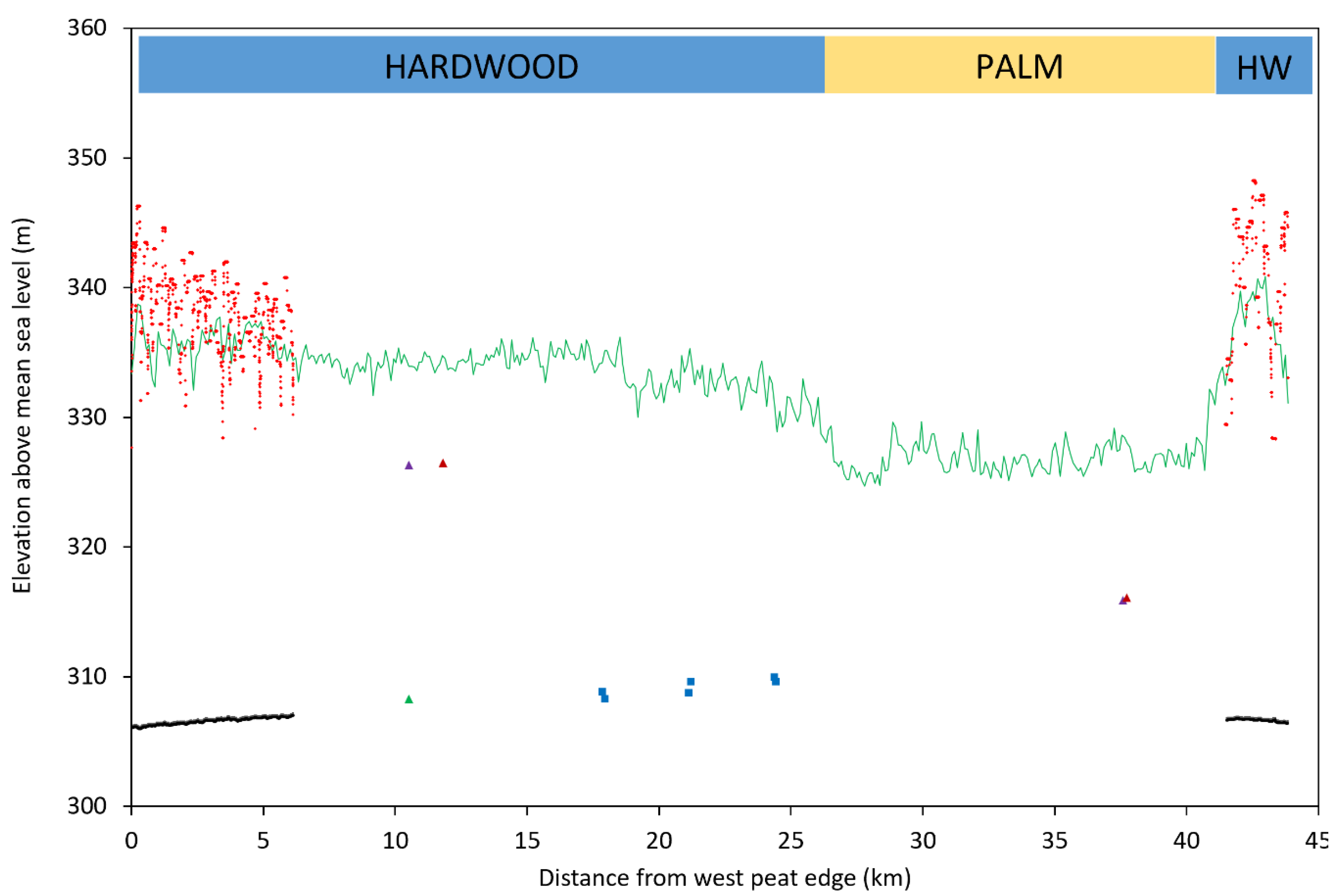
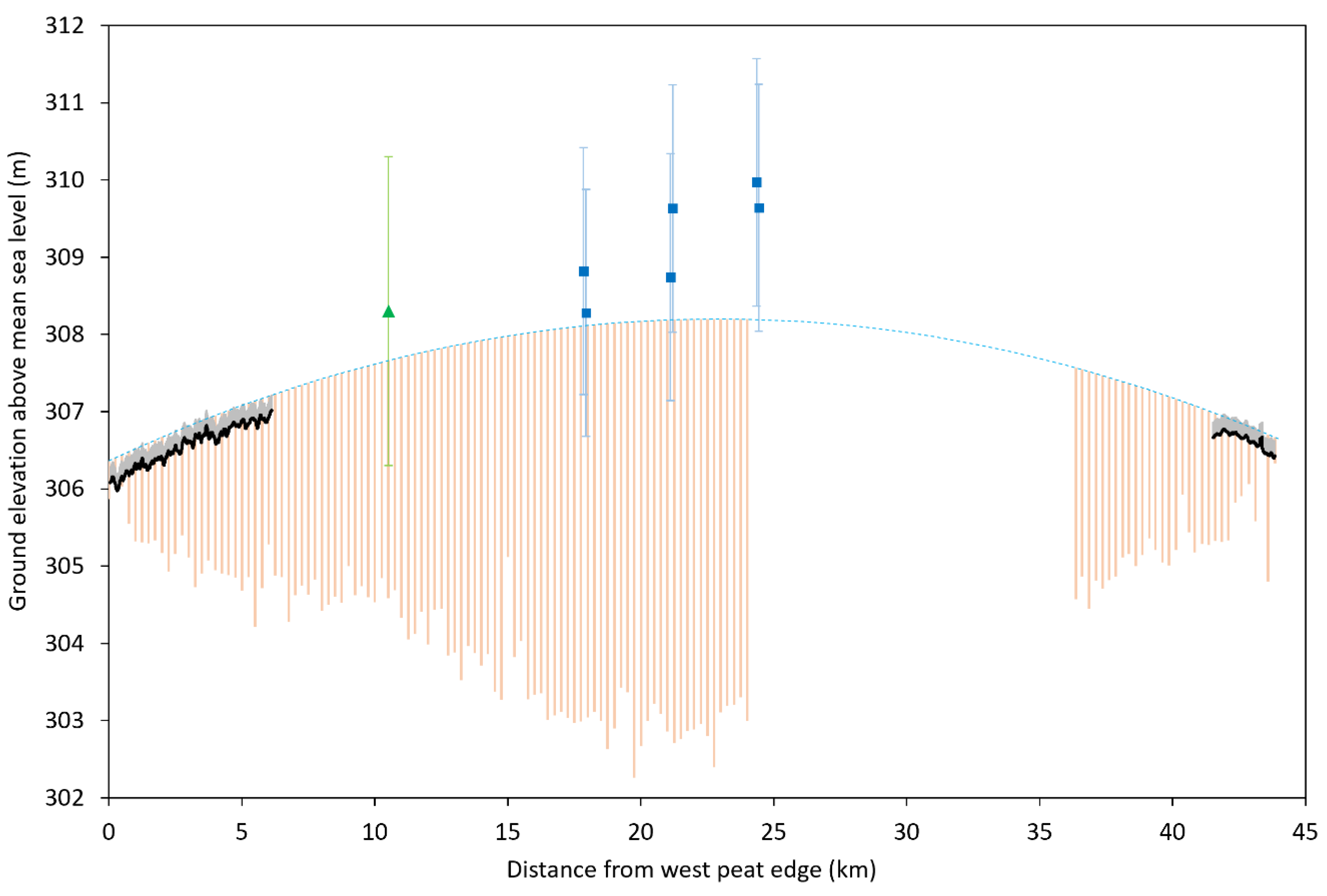
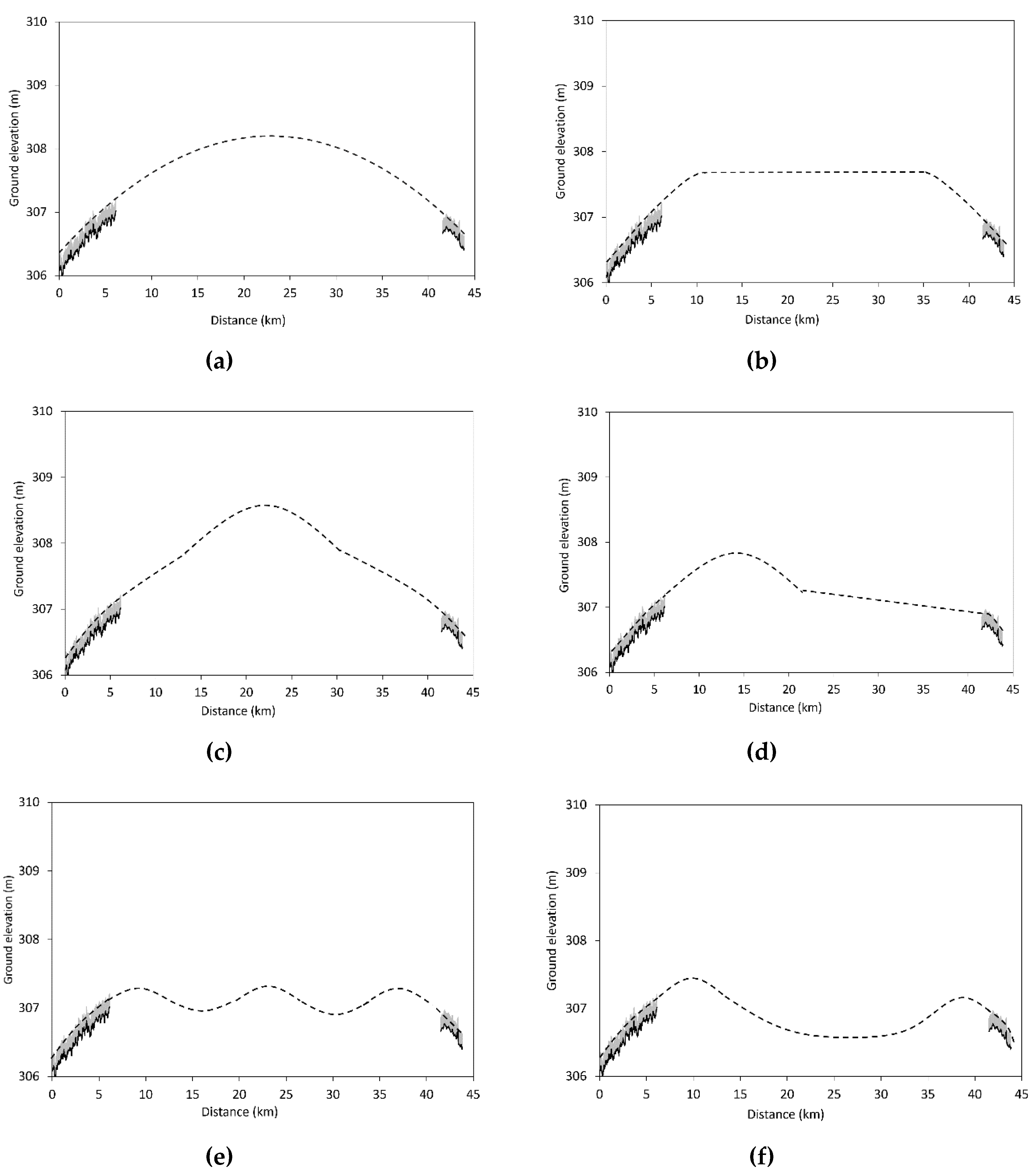
3.1. UAV LiDAR
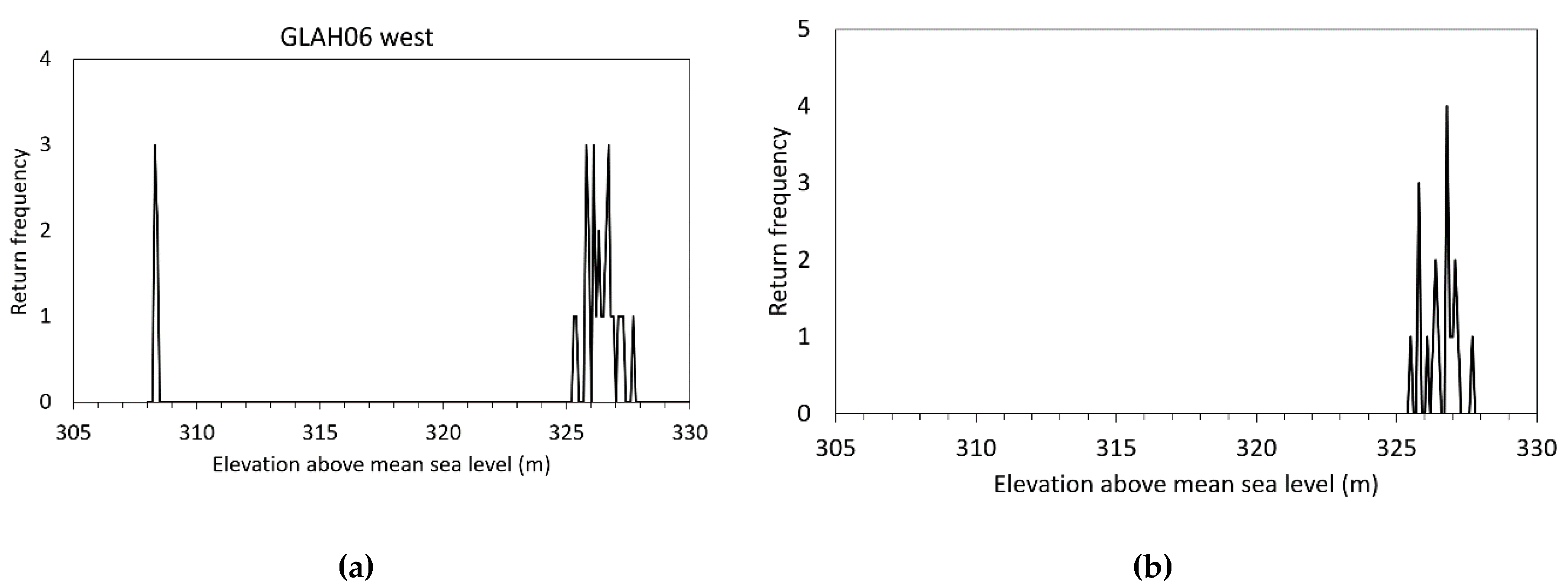
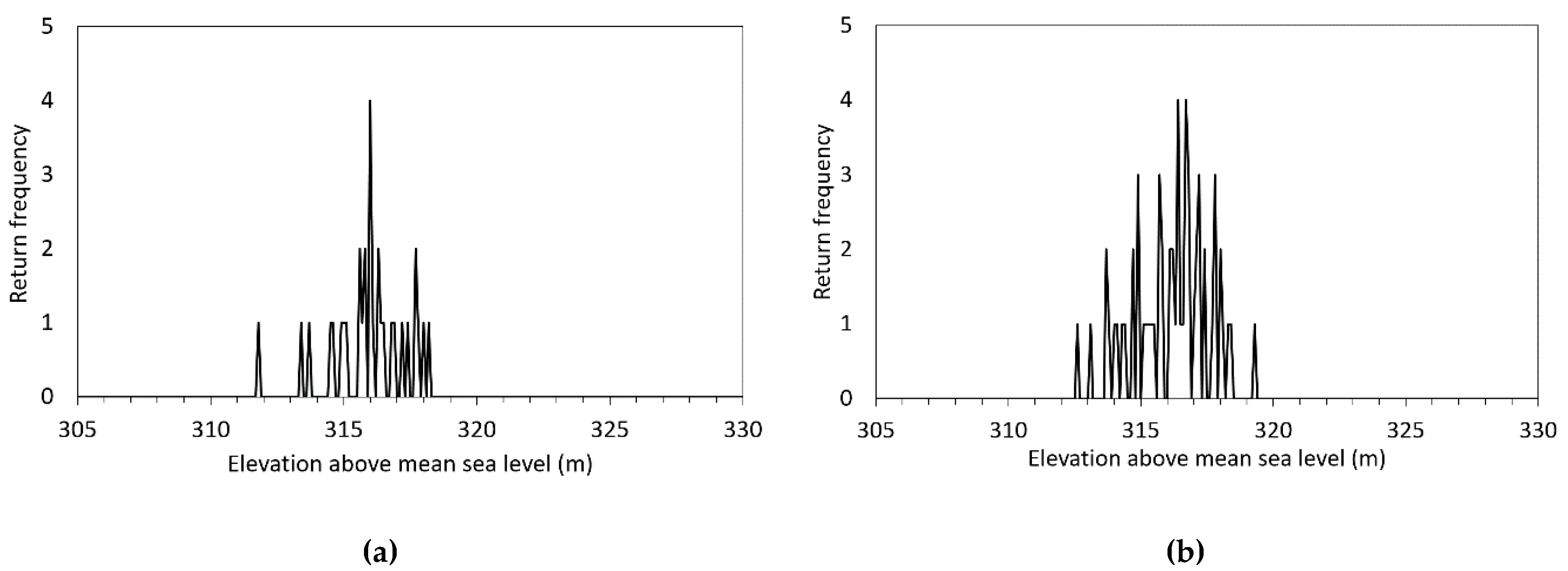
3.2. ICESat GLAH14 (Terrain) and GLAH06 (Surface)
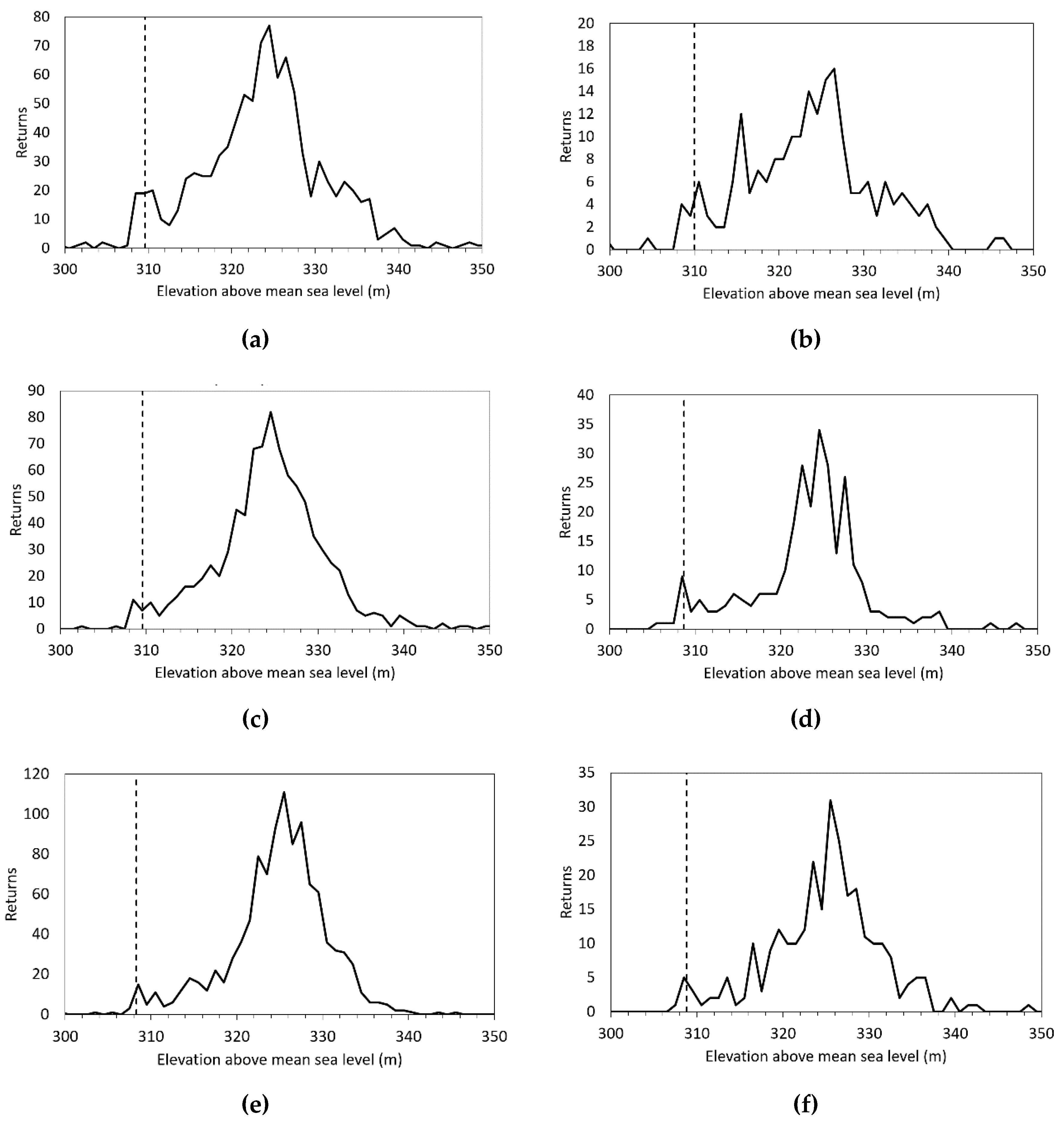
3.3. ICESat-2 ATL03
3.4. TanDEM-X
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rydin, H.; Jeglum, J.K. The Biology of Peatlands; Oxford University Press: Oxford, UK, 2006; pp. 230–233. [Google Scholar]
- Page, S.E.; Rieley, J.O.; Banks, C.J. Global and regional importance of the tropical peatland carbon pool. Glob. Chang. Biol. 2011, 17, 798–818. [Google Scholar] [CrossRef] [Green Version]
- Mitchard, E.T.A. The tropical forest carbon cycle and climate change. Nature 2018, 559, 527–534. [Google Scholar] [CrossRef] [PubMed]
- Miettinen, J.; Hooijer, A.; Vernimmen, R.; Liew, S.C.; Page, S.E. From carbon sink to carbon source: Extensive peat oxidation in insular Southeast Asia since 1990. Environ. Res. Lett. 2017, 12, 024014. [Google Scholar] [CrossRef]
- Dargie, G.C.; Lewis, S.L.; Lawson, I.T.; Mitchard, E.T.A.; Page, S.E.; Bocko, Y.E.; Ifo, S.A. Age, extent and carbon storage of the central Congo Basin peatland complex. Nature 2017, 542, 86–90. [Google Scholar] [CrossRef] [PubMed]
- Lähteenoja, O.; Page, S. High diversity of tropical peatland ecosystem types in the Pastaza-Marañón basin, Peruvian Amazonia. J. Geophys. Res. Biogeosci. 2011, 116, G0202. [Google Scholar] [CrossRef] [Green Version]
- Anderson, J.A.R. Tropical peat swamps of western Malesia. In Ecosystems of the World; Gore, A.J.P., Ed.; Elsevier: Amsterdam, The Netherlands, 1983; Volume 4B, pp. 181–200. [Google Scholar]
- Lähteenoja, O.; Ruokolainen, K.; Schulman, L.; Alvarez, J. Amazonian floodplains harbour minerotrophic and ombrotrophic peatlands. Catena 2009, 79, 140–145. [Google Scholar] [CrossRef]
- Phillips, S.; Rouse, G.E.; Bustin, R.M. Vegetation zones and diagnostic pollen profiles of a coastal peat swamp, Bocas del Toro, Panama. Palaeogeogr. Palaeoclimatol. Palaeoecol. 1997, 128, 301–338. [Google Scholar] [CrossRef]
- Zwally, H.J.; Schutz, R.; Bentley, C.; Bufton, J.; Herring, T.; Minster, J.; Spinhirne, J.; Thomas, R. GLAS/ICESat L1B Global Elevation Data, Version 34; [GLAH06]; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 2014. [CrossRef]
- Zwally, H.J.; Schutz, R.; Bentley, C.; Bufton, J.; Herring, T.; Minster, J.; Spinhirne, J.; Thomas, R. GLAS/ICESat L2 Global Land Surface Altimetry Data, Version 34; [GLAH14]; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 2014. [CrossRef]
- Ballhorn, U.; Jubanski, J.; Siegert, F. ICESat/GLAS Data as a Measurement Tool for Peatland Topography and Peat Swamp Forest Biomass in Kalimantan. Indones. Remote Sens. 2011, 3, 1957–1982. [Google Scholar] [CrossRef] [Green Version]
- Neumann, T.A.; Brenner, A.; Hancock, D.; Robbins, J.; Luthcke, S.B.; Harbeck, K.; Lee, J.; Gibbons, A.; Saba, J.; Brunt, K. ATLAS/ICESat-2 L2A Global Geolocated Photon Data, Version 1; ATL03; NSIDC: National Snow and Ice Data Center: Boulder, CO, USA, 2019. [CrossRef]
- Hawker, L.; Neal, J.; Bates, P. Accuracy assessment of the TanDEM-X 90 digital elevation model for selected floodplain sites. Remote Sens. Environ. 2019, 232, 111319. [Google Scholar] [CrossRef]
- Bakula, K.; Ostrowski, W.; Pilarska, M.; Szender, M.; Kurczynski, Z. Evaluation and Calibration of Fixed-Wing uav Mobile Mapping System Equipped with Lidar and Optical Sensors; International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences: Beijing, China, 2018; Volume XLII-1, pp. 25–32. [Google Scholar]
- Neumann, T.A.; Martino, A.J.; Markus, T.; Bae, S.; Bock, M.R.; Brenner, A.C.; Brunt, K.M.; Cavanaugh, J.; Fernandes, S.T.; Hancock, D.W.; et al. The Ice, Cloud, and Land Elevation Satellite–2 mission: A global geolocated photon product derived from the Advanced Topographic Laser Altimeter System. Remote Sen. Environ. 2019, 233, 111325. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Zhu, X.; Nie, S.; Xi, X.; Li, D.; Zheng, W.; Chen, S. Ground elevation accuracy verification of ICESat-2 data: A case study in Alaska, USA. Opt. Express 2019, 27, 38168–38179. [Google Scholar] [CrossRef] [PubMed]
- Ensle, F.; Heinzel, J.; Koch, B. Accuracy of vegetation height and terrain elevation derived from ICESat/GLAS in forested areas. Int. J. Appl. Earth Obs. Geoinf. 2014, 31, 37–44. [Google Scholar] [CrossRef]
- Belyea, L.R.; Baird, A.J. Beyond “the limits to peat bog growth”: Cross-scale feedback in peatland development. Ecol. Monogr. 2006, 76, 299–322. [Google Scholar] [CrossRef]
- Morris, P.J.; Baird, A.J.; Belyea, L.R. The DigiBog peatland development model: Ecohydrological simulations in 2D. Ecohydrology 2012, 5, 256–268. [Google Scholar] [CrossRef]
- Frolking, S.; Roulet, N.T.; Tuittila, E.; Bubier, J.L.; Quillet, A.; Talbot, J.; Richard, P.J.H. A new model of Holocene peatland net primary production, decomposition, water balance, and peat accumulation. Earth Syst. Dyn. 2010, 1, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Page, S.E.; Baird, A.J. Peatlands and global change: Response and resilience. Annu. Rev. Environ. Resour. 2016, 41, 35–57. [Google Scholar]
- Dubayah, R.; Goetz, S.J.; Blair, J.B.; Fatoyinbo, T.E.; Hansen, M.; Healey, S.P.; Hofton, M.A.; Hurtt, G.C.; Kellner, J.; Luthcke, S.B.; et al. The Global Ecosystem Dynamics Investigation. In Proceedings of the American Geophysical Union, Fall Meeting 2014, AGU, San Francisco, CA, USA, 15–19 December 2014. [Google Scholar]
- Page, S.E.; Rieley, J.O.; Shotyk, O.W.; Weiss, D. Interdependence of peat and vegetation in a tropical peat swamp forest. Philos. Trans. R. Soc. Lond. B 1999, 354, 1885–1897. [Google Scholar] [CrossRef] [PubMed]
- Anderson, J.A.R. The structure and development of peat swamps of Sarawak and Brunei. J. Trop. Geogr 1964, 18, 7–16. [Google Scholar]
- Andriesse, J.P. The Soils of West Sarawak (East Malaysia); Memoir 1; Department of Agriculture: Sarawak, Malaysia, 1972; Volume 1.
- Swindles, G.T.; Reczuga, M.; Lamentowicz, M.; Raby, C.L.; Turner, T.E.; Charman, D.J.; Gallego-Sala, A. Ecology of testate amoebae in an Amazonian peatland and development of a transfer function for palaeohydrological reconstruction. Microb. Ecol. 2014, 68, 284–298. [Google Scholar] [CrossRef] [PubMed]










© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Davenport, I.J.; McNicol, I.; Mitchard, E.T.A.; Dargie, G.; Suspense, I.; Milongo, B.; Bocko, Y.E.; Hawthorne, D.; Lawson, I.; Baird, A.J.; et al. First Evidence of Peat Domes in the Congo Basin using LiDAR from a Fixed-Wing Drone. Remote Sens. 2020, 12, 2196. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12142196
Davenport IJ, McNicol I, Mitchard ETA, Dargie G, Suspense I, Milongo B, Bocko YE, Hawthorne D, Lawson I, Baird AJ, et al. First Evidence of Peat Domes in the Congo Basin using LiDAR from a Fixed-Wing Drone. Remote Sensing. 2020; 12(14):2196. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12142196
Chicago/Turabian StyleDavenport, Ian J., Iain McNicol, Edward T. A. Mitchard, Greta Dargie, Ifo Suspense, Brice Milongo, Yannick E. Bocko, Donna Hawthorne, Ian Lawson, Andy J. Baird, and et al. 2020. "First Evidence of Peat Domes in the Congo Basin using LiDAR from a Fixed-Wing Drone" Remote Sensing 12, no. 14: 2196. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12142196