An Assessment of High-Density UAV Point Clouds for the Measurement of Young Forestry Trials

 , ,
, ,
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Data Collection
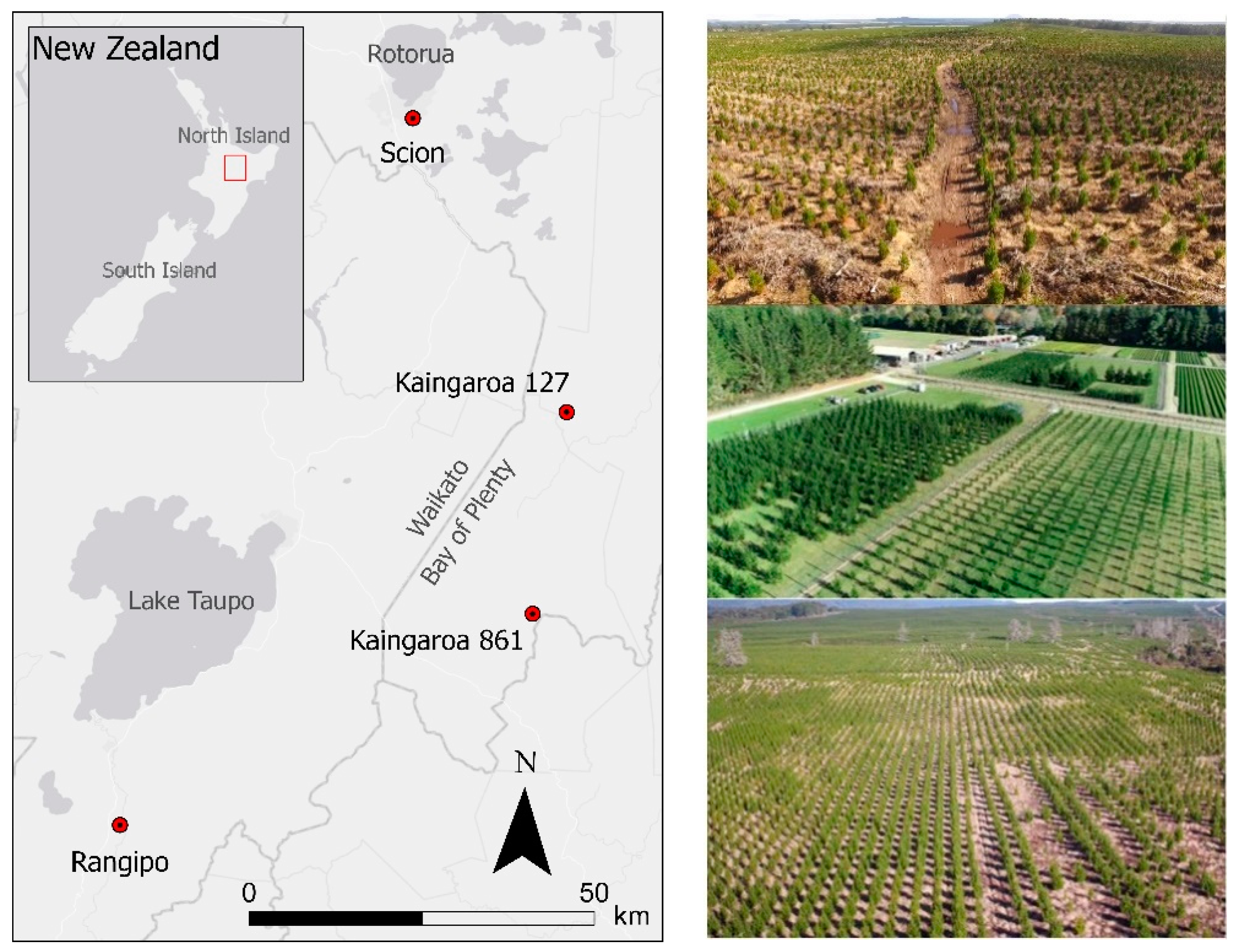
2.1.1. Study Sites and Field Data
2.1.2. UAV Data Acquisition Methodology
2.2. Data Processing and Analysis
2.2.1. Processing Raw Data
UAV Laser Scanning
Structure from Motion
2.2.2. Point Cloud Processing
2.2.3. Integrating SfM DSM with ULS DTM
2.3. Statistical Analysis
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Costa e Silva, J.; Dutkowski, G.W.; Gilmour, A.R. Analysis of early tree height in forest genetic trials is enhanced by including a spatially correlated residual. Can. J. For. Res. 2001, 31, 1887–1893. [Google Scholar] [CrossRef]
- Leckie, D.G. Advances in remote sensing technologies for forest surveys and management. Can. J. For. Res. 1990, 20, 464–483. [Google Scholar] [CrossRef]
- Iverson, L.R.; Graham, R.L.; Cook, E.A. Applications of satellite remote sensing to forested ecosystems. Landsc. Ecol. 1989, 3, 131–143. [Google Scholar] [CrossRef]
- Maclean, G.A.; Krabill, W. Gross-merchantable timber volume estimation using an airborne LIDAR system. Can. J. Remote Sens. 1986, 12, 7–18. [Google Scholar] [CrossRef]
- Nelson, R.; Krabill, W.; Tonelli, J. Estimating forest biomass and volume using airborne laser data. Remote Sens. Environ. 1988, 24, 247–267. [Google Scholar] [CrossRef]
- Nelson, R. How did we get here? An early history of forestry lidar. Can. J. Remote Sens. 2013, 39, S6–S17. [Google Scholar] [CrossRef] [Green Version]
- Caccamo, G.; Iqbal, I.A.; Osborn, J.; Bi, H.; Arkley, K.; Melville, G.; Aurik, D.; Stone, C. Comparing yield estimates derived from LiDAR and aerial photogrammetric point-cloud data with cut-to-length harvester data in a Pinus radiata plantation in Tasmania. Aust. For. 2018, 81, 131–141. [Google Scholar] [CrossRef]
- Gatziolis, D.; Fried, J.S.; Monleon, V.S. Challenges to estimating tree height via LiDAR in closed-canopy forests: A parable from Western Oregon. For. Sci. 2010, 56, 139–155. [Google Scholar]
- Hyyppä, J.; Yu, X.; Hyyppä, H.; Vastaranta, M.; Holopainen, M.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Vaaja, M.; Koskinen, J.; et al. Advances in forest inventory using airborne laser scanning. Remote Sens. 2012, 4, 1190–1207. [Google Scholar] [CrossRef] [Green Version]
- Næsset, E. Airborne laser scanning as a method in operational forest inventory: Status of accuracy assessments accomplished in Scandinavia. Scand. J. For. Res. 2007, 22, 433–442. [Google Scholar] [CrossRef]
- Watt, M.S.; Meredith, A.; Watt, P.; Gunn, A. The influence of LiDAR pulse density on the precision of inventory metrics in young unthinned Douglas-fir stands during initial and subsequent LiDAR acquisitions. N. Z. J. For. Sci. 2014, 44, 18. [Google Scholar] [CrossRef] [Green Version]
- de Oliveira, L.T.; Ferreira, M.Z.; de Carvalho, L.M.T.; Filho, A.C.F.; Oliveira, T.C.A.; Silveira, E.M.O.; Junior, E.F.W.A. Determining timber volume of eucalyptus stands by airborne laser scanning. Pesqui. Agropecu. Bras. 2014, 49, 692–700. [Google Scholar] [CrossRef] [Green Version]
- Hill, A.; Breschan, J.; Mandallaz, D. Accuracy assessment of timber volume maps using forest inventory data and LiDAR canopy height models. Forests 2014, 5, 2253–2275. [Google Scholar] [CrossRef] [Green Version]
- Watt, M.S.; Adams, T.; Marshall, H.; Pont, D.; Lee, J.; Crawley, D.; Watt, P. Modelling variation in pinus radiata stem volume and outerwood stress-wave velocity from LiDAR metrics. N. Z. J. For. Sci. 2013, 43, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Means, J.E.; Acker, S.A.; Harding, D.J.; Blair, J.B.; Lefsky, M.A.; Cohen, W.B.; Harmon, M.E.; McKee, W.A. Use of large-footprint scanning airborne lidar to estimate forest stand characteristics in the Western Cascades of Oregon. Remote Sens. Environ. 1999, 67, 298–308. [Google Scholar] [CrossRef]
- Watt, P.; Watt, M.S. Development of a national model of Pinus radiata stand volume from LiDAR metrics for New Zealand. Int. J. Remote Sens. 2013, 34, 5892–5904. [Google Scholar] [CrossRef]
- Coops, N.C.; Hilker, T.; Wulder, M.A.; St-Onge, B.; Newnham, G.; Siggins, A.; Trofymow, J.T. Estimating canopy structure of Douglas-fir forest stands from discrete-return LiDAR. Trees 2007, 21, 295. [Google Scholar] [CrossRef] [Green Version]
- Magnussen, S.; Renaud, J.P. Multidimensional scaling of first-return airborne laser echoes for prediction and model-assisted estimation of a distribution of tree stem diameters. Ann. For. Sci. 2016, 73, 1089–1098. [Google Scholar] [CrossRef] [Green Version]
- Prieditis, G.; Šmits, I.; Arhipova, I.; Daģis, S.; Dubrovskis, D. Tree diameter models from field and remote sensing data. Int. J. Math. Models Methods Appl. Sci. 2012, 6, 707–714. [Google Scholar]
- Tandoc, F.A.M.; Paringit, E.C.; Bantayan, N.C.; Argamosa, R.J.L.; Faelga, R.A.G.; Ibañez, C.A.G.; Posilero, M.A.V.; Zaragosa, G.P.; Malabanan, M.V. Diameter at breast height estimation in Mt. Makiling, Laguna, Philippines using metrics derived from airborne LiDAR data and Worldview-2 bands. In Lidar Remote Sensing for Environmental Monitoring XV; International Society for Optics and Photonics: Bellingham, WA, USA, 2016; p. 98791C. [Google Scholar]
- Kato, A.; Moskal, L.M.; Schiess, P.; Swanson, M.E.; Calhoun, D.; Stuetzle, W. Capturing tree crown formation through implicit surface reconstruction using airborne lidar data. Remote Sens. Environ. 2009, 113, 1148–1162. [Google Scholar] [CrossRef]
- Popescu, S.C.; Wynne, R.H.; Nelson, R.F. Measuring individual tree crown diameter with lidar and assessing its influence on estimating forest volume and biomass. Can. J. Remote Sens. 2003, 29, 564–577. [Google Scholar] [CrossRef]
- Mikita, T.; Patočka, Z.; Sabol, J. Estimation of leaf area index (LAI) in forests on the basis of airborne laser scanning in the conditions of the Czech Republic. Zpr. Lesn. Vyzk. 2014, 59, 234–242. [Google Scholar]
- Pearse, G.D.; Morgenroth, J.; Watt, M.S.; Dash, J.P. Optimising prediction of forest leaf area index from discrete airborne lidar. Remote Sens. Environ. 2017, 200, 220–239. [Google Scholar] [CrossRef]
- Zhang, D.; Liu, J.; Ni, W.; Sun, G.; Zhang, Z.; Liu, Q.; Wang, Q. Estimation of Forest Leaf Area Index Using Height and Canopy Cover Information Extracted From Unmanned Aerial Vehicle Stereo Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 471–481. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Yu, X.; Vastaranta, M.; Hyyppä, H.; Kukko, A.; Holopainen, M.; Heipke, C.; Hirschmugl, M.; Morsdorf, F.; et al. An international comparison of individual tree detection and extraction using airborne laser scanning. Remote Sens. 2012, 4, 950–974. [Google Scholar] [CrossRef] [Green Version]
- Eysn, L.; Hollaus, M.; Lindberg, E.; Berger, F.; Monnet, J.M.; Dalponte, M.; Kobal, M.; Pellegrini, M.; Lingua, E.; Mongus, D.; et al. A benchmark of lidar-based single tree detection methods using heterogeneous forest data from the Alpine Space. Forests 2015, 6, 1721–1747. [Google Scholar] [CrossRef] [Green Version]
- Watt, M.S.; Meredith, A.; Watt, P.; Gunn, A. Use of LiDAR to estimate stand characteristics for thinning operations in young douglas-fir plantations. N. Z. J. For. Sci. 2013, 43, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Lang, M.; Arumäe, T. Assessment of forest thinning intensity using sparse point clouds from repeated airborne lidar measurements. For. Stud. 2018, 68, 40–50. [Google Scholar] [CrossRef] [Green Version]
- González-Ferreiro, E.; Diéguez-Aranda, U.; Crecente-Campo, F.; Barreiro-Fernández, L.; Miranda, D.; Castedo-Dorado, F. Modelling canopy fuel variables for Pinus radiata D. Don in NW Spain with low-density LiDAR data. Int. J. Wildland Fire 2014, 23, 350–362. [Google Scholar] [CrossRef]
- Fernández-álvarez, M.; Armesto, J.; Picos, J. LiDAR-based wildfire prevention in WUI: The automatic detection, measurement and evaluation of forest fuels. Forests 2019, 10, 148. [Google Scholar] [CrossRef] [Green Version]
- Fidalgo-González, L.A.; Arellano-Pérez, S.; Álvarez-González, J.G.; Castedo-Dorado, F.; Ruiz-González, A.D.; González-Ferreiro, E. Estimation of the vertical distribution of the fine canopy fuel in pinus sylvestris stands using low density LiDAR data. Rev. Teledetec. 2019, 2019, 1–16. [Google Scholar] [CrossRef]
- Hevia, A.; Álvarez-González, J.G.; Ruiz-Fernández, E.; Prendes, C.; Ruiz-González, A.D.; Majada, J.; González-Ferreiro, E. Modelling canopy fuel and forest stand variables and characterizing the influence of thinning in the stand structure using airborne LiDAR. Rev. Teledetec. 2016, 2016, 41–45. [Google Scholar] [CrossRef] [Green Version]
- Ferraz, A.; Saatchi, S.; Mallet, C.; Jacquemoud, S.; Gonçalves, G.; Silva, C.A.; Soares, P.; Tomé, M.; Pereira, L. Airborne lidar estimation of aboveground forest biomass in the absence of field inventory. Remote Sens. 2016, 8, 653. [Google Scholar] [CrossRef] [Green Version]
- Sheridan, R.D.; Popescu, S.C.; Gatziolis, D.; Morgan, C.L.S.; Ku, N.W. Modeling forest aboveground biomass and volume using airborne LiDAR metrics and forest inventory and analysis data in the pacific northwest. Remote Sens. 2015, 7, 229–255. [Google Scholar] [CrossRef]
- Rosette, J.; Suárez, J.; Nelson, R.; Los, S.; Cook, B.; North, P. Lidar remote sensing for biomass assessment. Remote Sens. Biomass—Princ. Appl. 2012, 24, 3–27. [Google Scholar]
- Zolkos, S.G.; Goetz, S.J.; Dubayah, R. A meta-analysis of terrestrial aboveground biomass estimation using lidar remote sensing. Remote Sens. Environ. 2013, 128, 289–298. [Google Scholar] [CrossRef]
- Popescu, S.C. Estimating biomass of individual pine trees using airborne lidar. Biomass Bioenergy 2007, 31, 646–655. [Google Scholar] [CrossRef]
- Silva, C.A.; Klauberg, C.E.; Carvalho, S.D.P.C.; Hudak, A.T.; Rodriguez, L.C.E. Mapping aboveground carbon stocks using LiDAR data in Eucalyptus spp. plantations in the state of São Paulo, Brazil. Sci. For. 2014, 42, 591–604. [Google Scholar]
- Spriggs, R.A.; Vanderwel, M.C.; Jones, T.A.; Caspersen, J.P.; Coomes, D.A. A critique of general allometry-inspired models for estimating forest carbon density from airborne LiDAR. PLoS ONE 2019, 14, e0215238. [Google Scholar] [CrossRef]
- Vincent, G.; Sabatier, D.; Rutishauser, E. Revisiting a universal airborne light detection and ranging approach for tropical forest carbon mapping: Scaling-up from tree to stand to landscape. Oecologia 2014, 175, 439–443. [Google Scholar] [CrossRef]
- Andersen, H.-E.; Reutebuch, S.E.; McGaughey, R.J. A rigorous assessment of tree height measurements obtained using airborne lidar and conventional field methods. Can. J. Remote Sens. 2006, 32, 355–366. [Google Scholar] [CrossRef]
- Xu, C.; Manley, B.; Morgenroth, J. Evaluation of modelling approaches in predicting forest volume and stand age for small-scale plantation forests in New Zealand with RapidEye and LiDAR. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 386–396. [Google Scholar] [CrossRef]
- Holmgren, J.; Nilsson, M.; Olsson, H. Estimation of tree height and stem volume on plots using airborne laser scanning. For. Sci. 2003, 49, 419–428. [Google Scholar]
- Næsset, E.; Bjerknes, K.-O. Estimating tree heights and number of stems in young forest stands using airborne laser scanner data. Remote Sens. Environ. 2001, 78, 328–340. [Google Scholar] [CrossRef]
- Persson, A.; Holmgren, J.; Soderman, U. Detecting and measuring individual trees using an airborne laser scanner. Photogramm. Eng. Remote Sens. 2002, 68, 925–932. [Google Scholar]
- Liang, X.; Wang, Y.; Pyörälä, J.; Lehtomäki, M.; Yu, X.; Kaartinen, H.; Kukko, A.; Honkavaara, E.; Issaoui, A.E.I.; Nevalainen, O.; et al. Forest in situ observations using unmanned aerial vehicle as an alternative of terrestrial measurements. For. Ecosyst. 2019, 6, 20. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Hyyppä, J.; Liang, X.; Kaartinen, H.; Yu, X.; Lindberg, E.; Holmgren, J.; Qin, Y.; Mallet, C.; Ferraz, A. International benchmarking of the individual tree detection methods for modeling 3-D canopy structure for silviculture and forest ecology using airborne laser scanning. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5011–5027. [Google Scholar] [CrossRef] [Green Version]
- Jaakkola, A.; Hyyppä, J.; Kukko, A.; Yu, X.; Kaartinen, H.; Lehtomäki, M.; Lin, Y. A low-cost multi-sensoral mobile mapping system and its feasibility for tree measurements. ISPRS J. Photogramm. Remote Sens. 2010, 65, 514–522. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.; Turner, D. Development of a UAV-LiDAR system with application to forest inventory. Remote Sens. 2012, 4, 1519–1543. [Google Scholar] [CrossRef] [Green Version]
- Cao, L.; Liu, H.; Fu, X.; Zhang, Z.; Shen, X.; Ruan, H. Comparison of UAV LiDAR and digital aerial photogrammetry point clouds for estimating forest structural attributes in subtropical planted forests. Forests 2019, 10, 145. [Google Scholar] [CrossRef] [Green Version]
- Jaakkola, A.; Hyyppä, J.; Yu, X.; Kukko, A.; Kaartinen, H.; Liang, X.; Hyyppä, H.; Wang, Y. Autonomous collection of forest field reference—The outlook and a first step with UAV laser scanning. Remote Sens. 2017, 9, 785. [Google Scholar] [CrossRef] [Green Version]
- Puliti, S.; Dash, J.P.; Watt, M.S.; Breidenbach, J.; Pearse, G.D. A comparison of UAV laser scanning, photogrammetry and airborne laser scanning for precision inventory of small-forest properties. For. Int. J. For. Res. 2020, 93, 150–162. [Google Scholar] [CrossRef]
- Sankey, T.; Donager, J.; McVay, J.; Sankey, J.B. UAV lidar and hyperspectral fusion for forest monitoring in the southwestern USA. Remote Sens. Environ. 2017, 195, 30–43. [Google Scholar] [CrossRef]
- Li, J.; Yang, B.; Cong, Y.; Cao, L.; Fu, X.; Dong, Z. 3D Forest Mapping Using A Low-Cost UAV Laser Scanning System: Investigation and Comparison. Remote Sens. 2019, 11, 717. [Google Scholar] [CrossRef] [Green Version]
- Brede, B.; Lau, A.; Bartholomeus, H.M.; Kooistra, L. Comparing RIEGL RiCOPTER UAV LiDAR derived canopy height and DBH with terrestrial LiDAR. Sensors 2017, 17, 2371. [Google Scholar] [CrossRef]
- Wallace, L.; Musk, R.; Lucieer, A. An assessment of the repeatability of automatic forest inventory metrics derived from UAV-borne laser scanning data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7160–7169. [Google Scholar] [CrossRef]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from Motion Photogrammetry in Forestry: A Review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef] [Green Version]
- Birdal, A.C.; Avdan, U.; Türk, T. Estimating tree heights with images from an unmanned aerial vehicle. Geomat. Nat. Hazards Risk 2017, 8, 1144–1156. [Google Scholar] [CrossRef] [Green Version]
- Fankhauser, K.E.; Strigul, N.S.; Gatziolis, D. Augmentation of traditional forest inventory and Airborne laser scanning with unmanned aerial systems and photogrammetry for forest monitoring. Remote Sens. 2018, 10, 1562. [Google Scholar] [CrossRef] [Green Version]
- Frey, J.; Kovach, K.; Stemmler, S.; Koch, B. UAV photogrammetry of forests as a vulnerable process. A sensitivity analysis for a structure from motion RGB-image pipeline. Remote Sens. 2018, 10, 912. [Google Scholar] [CrossRef] [Green Version]
- Guerra-Hernández, J.; González-Ferreiro, E.; Monleón, V.J.; Faias, S.P.; Tomé, M.; Díaz-Varela, R.A. Use of multi-temporal UAV-derived imagery for estimating individual tree growth in Pinus pinea stands. Forests 2017, 8, 300. [Google Scholar] [CrossRef]
- Hentz, Â.M.K.; Silva, C.A.; Dalla Corte, A.P.; Netto, S.P.; Strager, M.P.; Klauberg, C. Estimating forest uniformity in Eucalyptus spp. and Pinus taeda L. stands using field measurements and structure from motion point clouds generated from unmanned aerial vehicle (UAV) data collection. For. Syst. 2018, 27, e005. [Google Scholar] [CrossRef]
- Iizuka, K.; Yonehara, T.; Itoh, M.; Kosugi, Y. Estimating Tree Height and Diameter at Breast Height (DBH) from Digital surface models and orthophotos obtained with an unmanned aerial system for a Japanese Cypress (Chamaecyparis obtusa) Forest. Remote Sens. 2018, 10, 13. [Google Scholar] [CrossRef] [Green Version]
- Krause, S.; Sanders, T.G.M.; Mund, J.P.; Greve, K. UAV-based photogrammetric tree height measurement for intensive forest monitoring. Remote Sens. 2019, 11, 758. [Google Scholar] [CrossRef] [Green Version]
- Moukomla, S.; Srestasathiern, P.; Siripon, S.; Wasuhiranyrith, R.; Kooha, P. Estimating above ground biomass for eucalyptus plantation using data from unmanned aerial vehicle imagery. Remote Sens. Agric. Ecosyst. Hydrol. XX 2018, 1078308. [Google Scholar] [CrossRef]
- Dempewolf, J.; Nagol, J.; Hein, S.; Thiel, C.; Zimmermann, R. Measurement of within-season tree height growth in a mixed forest stand using UAV imagery. Forests 2017, 8, 231. [Google Scholar] [CrossRef] [Green Version]
- Fraser, B.T.; Congalton, R.G. Issues in Unmanned Aerial Systems (UAS) data collection of complex forest environments. Remote Sens. 2018, 10, 908. [Google Scholar] [CrossRef] [Green Version]
- Ota, T.; Ogawa, M.; Mizoue, N.; Fukumoto, K.; Yoshida, S. Forest Structure Estimation from a UAV-Based Photogrammetric Point Cloud in Managed Temperate Coniferous Forests. Forests 2017, 8, 343. [Google Scholar] [CrossRef]
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P.; Chiteculo, V. Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2017, 38, 2392–2410. [Google Scholar] [CrossRef]
- Puliti, S.; Ørka, H.O.; Gobakken, T.; Næsset, E. Inventory of small forest areas using an unmanned aerial system. Remote Sens. 2015, 7, 9632–9654. [Google Scholar] [CrossRef] [Green Version]
- Thiel, C.; Schmullius, C. Derivation of forest parameters from stereographic UAV data—A comparison with airborne lidar data. In Proceedings of the Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016. [Google Scholar]
- Balenović, I.; Marjanović, H. Selection of the optimal spatial resolution of image-based digital surface models for use in forestry—Example from the area of Lowland oak forests. Nova Meh. Šumar. 2016, 37, 1–13. [Google Scholar]
- Dandois, J.P.; Ellis, E.C. High spatial resolution three-dimensional mapping of vegetation spectral dynamics using computer vision. Remote Sens. Environ. 2013, 136, 259–276. [Google Scholar] [CrossRef] [Green Version]
- Dandois, J.P.; Olano, M.; Ellis, E.C. Optimal altitude, overlap, and weather conditions for computer vision uav estimates of forest structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef] [Green Version]
- Lisein, J.; Bonnet, S.; Lejeune, P.; Pierrot-Deseilligny, M. Modeling of the forest canopy by photogrammetry from the images acquired by drone. Rev. Fr. Photogramm. Teledetect. 2014, 206, 45–54. [Google Scholar]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A photogrammetric workflow for the creation of a forest canopy height model from small unmanned aerial system imagery. Forests 2013, 4, 922–944. [Google Scholar] [CrossRef] [Green Version]
- Moe, K.T.; Owari, T.; Furuya, N.; Hiroshima, T. Comparing Individual Tree Height Information Derived from Field Surveys, LiDAR and UAV-DAP for High-Value Timber Species in Northern Japan. Forests 2020, 11, 223. [Google Scholar] [CrossRef] [Green Version]
- Alonzo, M.; Andersen, H.E.; Morton, D.C.; Cook, B.D. Quantifying boreal forest structure and composition using UAV structure from motion. Forests 2018, 9, 119. [Google Scholar] [CrossRef] [Green Version]
- Ni, W.; Liu, J.; Zhang, Z.; Sun, G.; Yang, A. Evaluation of UAV-based forest inventory system compared with LiDAR data. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milano, Italy, 26–31 July 2015; pp. 3874–3877. [Google Scholar]
- Ni, W.; Sun, G.; Pang, Y.; Zhang, Z.; Liu, J.; Yang, A.; Wang, Y.; Zhang, D. Mapping Three-Dimensional Structures of Forest Canopy Using UAV Stereo Imagery: Evaluating Impacts of Forward Overlaps and Image Resolutions with LiDAR Data as Reference. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3578–3589. [Google Scholar] [CrossRef]
- Reuben, J.; Hussin, Y.; Kloosterman, H.; Ismail, M.H. Tree height derived from point clouds of UAV compared to airborne laser scanning and its effect on estimating biomass and carbon stock in tropical rain forest of Malaysia. In Proceedings of the 38th Asian Conference on Remote Sensing—Space Applications: Touching Human Lives, ACRS 2017, New Delhi, India, 23–27 October 2017. [Google Scholar]
- Huang, H.; He, S.; Chen, C. Leaf abundance affects tree height estimation derived from UAV images. Forests 2019, 10, 931. [Google Scholar] [CrossRef] [Green Version]
- Yurtseven, H.; Akgul, M.; Coban, S.; Gulci, S. Determination and accuracy analysis of individual tree crown parameters using UAV based imagery and OBIA techniques. Meas. J. Int. Meas. Confed. 2019, 145, 651–664. [Google Scholar] [CrossRef]
- Fawcett, D.; Azlan, B.; Hill, T.C.; Kho, L.K.; Bennie, J.; Anderson, K. Unmanned aerial vehicle (UAV) derived structure-from-motion photogrammetry point clouds for oil palm (Elaeis guineensis) canopy segmentation and height estimation. Int. J. Remote Sens. 2019, 40, 7538–7560. [Google Scholar] [CrossRef] [Green Version]
- Zainuddin, K.; Jaffri, M.H.; Zainal, M.Z.; Ghazali, N.; Samad, A.M. Verification test on ability to use low-cost UAV for quantifying tree height. In Proceedings of the 2016 IEEE 12th International Colloquium on Signal Processing & Its Applications (CSPA), Melaka, Malaysia, 4–6 March 2016; pp. 317–321. [Google Scholar]
- Shin, P.; Sankey, T.; Moore, M.; Thode, A. Evaluating unmanned aerial vehicle images for estimating forest canopy fuels in a ponderosa pine stand. Remote Sens. 2018, 10, 1266. [Google Scholar] [CrossRef] [Green Version]
- Karpina, M.; Jarząbek-Rychard, M.; Tymków, P.; Borkowski, A. UAV-based automatic tree growth measurement for biomass estimation. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 8, 685–688. [Google Scholar] [CrossRef]
- Jayathunga, S.; Owari, T.; Tsuyuki, S.; Hirata, Y. Potential of UAV photogrammetry for characterization of forest canopy structure in uneven-aged mixed conifer–broadleaf forests. Int. J. Remote Sens. 2020, 41, 53–73. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovskỳ, Z.; Turner, D.; Vopěnka, P. Assessment of forest structure using two UAV techniques: A comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef] [Green Version]
- Hall, P. Mechanical Site Preparation Survey; New Zealand Forest Site Management Cooperative: Rotorua, New Zealand, 1996; pp. 1–17. [Google Scholar]
- Paterson, D.B.; Mason, W.L. Cultivation of Soils for Forestry; Forestry Commission Bulletin: London, UK, 1999. [Google Scholar]
- Pix4D. Step 1. Before Starting a Project > 4. Getting GCPs on the Field or through other Sources (Optional but Recommended). Available online: https://support.pix4d.com/hc/en-us/articles/202557489-Step-1-Before-Starting-a-Project-4-Getting-GCPs-on-the-field-or-through-other-sources-optional-but-recommended (accessed on 5 March 2020).
- Hartley, R.; Melia, N.; Estarija, H.J.; Watt, M.S.; Pearse, G.; Massam, P.; Wright, L.A.H.; Stovold, G.T. An Assessment of UAV Laser Scanning and Photogrammetric Point Clouds for the Measurement of Young Forestry Trials; Scion, Growing Confidence in Forestry’s Future Technical Note GCFF TN-028: Rotorua, New Zealand, 2019; pp. 1–11. [Google Scholar]
- Pix4D. Support Pix4Dmapper Manual: Menu Process > Processing Options... > 1. Initial Processing > Matching. Available online: https://support.pix4d.com/hc/en-us/articles/205433155-Menu-Process-Processing-Options-1-Initial-Processing-Matching (accessed on 17 June 2020).
- Esri Inc. ArcGIS Pro, Version 2.5.1; Esri Inc.: Redlands, CA, USA, 2019. [Google Scholar]
- Isenburg, M. LAStools—Efficient LiDAR Processing Software; Rapidlasso GmbH: Gilching, Germany, 2019. [Google Scholar]
- Roussel, J.-R.; Auty, D.; De Boissieu, F.; Meador, A. lidR: Airborne LiDAR data manipulation and visualization for forestry applications. R Package Version 2018, 1. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2020. [Google Scholar]
- Girardeau-Montaut, D. CloudCompare; Version 2.1.1. 2020. Available online: http://cloudcompare.org/ (accessed on 2 June 2020).
- Dash, J.P.; Watt, M.S.; Hartley, R.J.L. Testing UAV-Borne Riegl Mini VUX-1 Scanner for Phenotyping a Mature Genetics Trial; Scion, Growing Confidence in Forestry’s Future Technical Note GCFF TN-023: Rotorua, New Zealand, 2019; pp. 1–9. [Google Scholar]
- Hyyppä, J.; Hyyppä, H.; Litkey, P.; Yu, X.; Haggrén, H.; Rönnholm, P.; Pyysalo, U.; Pitkänen, J.; Maltamo, M. Algorithms and methods of airborne laser scanning for forest measurements. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 36, 82–89. [Google Scholar]
- Aldred, A.H.; Bonnor, G.M. Application of Airborne Lasers to Forest Surveys; Information Report PI-X-051; Agriculture Canada, Ministry of State for Forestry, Petawawa National Forestry Institute: Chalk River, ON, Canada, 1985; 62p. [Google Scholar]
- Hyyppa, J. Detecting and estimating attributes for single trees using laser scanner. Photogramm. J. Finl. 1999, 16, 27–42. [Google Scholar]
- Korpela, I.; Dahlin, B.; Schäfer, H.; Bruun, E.; Haapaniemi, F.; Honkasalo, J.; Ilvesniemi, S.; Kuutti, V.; Linkosalmi, M.; Mustonen, J. Single-tree forest inventory using lidar and aerial images for 3D treetop positioning, species recognition, height and crown width estimation. In Proceedings of the ISPRS workshop on laser scanning, Enschede, The Netherlands, 12–13 June 2019; pp. 227–233. [Google Scholar]
- Roussel, J.R.; Caspersen, J.; Béland, M.; Thomas, S.; Achim, A. Removing bias from LiDAR-based estimates of canopy height: Accounting for the effects of pulse density and footprint size. Remote Sens. Environ. 2017, 198, 1–16. [Google Scholar] [CrossRef]
- Riegl. RIEGL miniVUX-1UAV Datasheet. Available online: http://www.riegl.com/uploads/tx_pxpriegldownloads/RIEGL_miniVUX-1UAV_Datasheet_2020-03-31.pdf (accessed on 2 June 2020).
- Schaer, P.; Skaloud, J.; Landtwing, S.; Legat, K. Accuracy estimation for laser point cloud including scanning geometry. In Proceedings of the Mobile Mapping Symposium 2007, Padova, Italy, 29–31 May 2007. [Google Scholar]
- Brieger, F.; Herzschuh, U.; Pestryakova, L.A.; Bookhagen, B.; Zakharov, E.S.; Kruse, S. Advances in the derivation of Northeast Siberian forest metrics using high-resolution UAV-based photogrammetric point clouds. Remote Sens. 2019, 11, 1447. [Google Scholar] [CrossRef] [Green Version]
- Lin, J.; Wang, M.; Ma, M.; Lin, Y. Aboveground tree biomass estimation of sparse subalpine coniferous forest with UAV oblique photography. Remote Sens. 2018, 10, 1849. [Google Scholar] [CrossRef] [Green Version]
- Surový, P.; Almeida Ribeiro, N.; Panagiotidis, D. Estimation of positions and heights from UAV-sensed imagery in tree plantations in agrosilvopastoral systems. Int. J. Remote Sens. 2018, 39, 4786–4800. [Google Scholar] [CrossRef]
- O’Connor, J.; Smith, M.J.; James, M.R. Cameras and settings for aerial surveys in the geosciences: Optimising image data. Prog. Phys. Geogr. 2017, 41, 325–344. [Google Scholar] [CrossRef] [Green Version]
- Osborn, J.; Dell, M.; Stone, C.; Iqbal, I.; Lacey, M.; Lucieer, A.; McCoull, C. Photogrammetry for forest inventory: Planning Guidelines. 2017. Available online: https://www.fwpa.com.au/images/resources/2017/Photogrammetry_for_Forest_Inventory_Planning_Guide_PNC326-1314.pdf (accessed on 5 June 2020).
- DJI Ltd. Phantom 4 Pro V2.0 Specs. Available online: https://www.dji.com/nz/phantom-4-pro-v2/specs (accessed on 5 June 2020).
- Pádua, L.; Marques, P.; Adão, T.; Hruška, J.; Peres, E.; Morais, R.; Sousa, A.; Sousa, J.J. UAS-based imagery and photogrammetric processing for tree height and crown diameter extraction. In Proceedings of the International Conference on Geoinformatics and Data Analysis, Prague, Czech Republic, 20–22 April 2018; pp. 87–91. [Google Scholar]
- Goldbergs, G.; Maier, S.W.; Levick, S.R.; Edwards, A. Efficiency of individual tree detection approaches based on light-weight and low-cost UAS imagery in Australian Savannas. Remote Sens. 2018, 10, 161. [Google Scholar] [CrossRef] [Green Version]
- Zahawi, R.A.; Dandois, J.P.; Holl, K.D.; Nadwodny, D.; Reid, J.L.; Ellis, E.C. Using lightweight unmanned aerial vehicles to monitor tropical forest recovery. Biol. Conserv. 2015, 186, 287–295. [Google Scholar] [CrossRef] [Green Version]
- Kellner, J.R.; Armston, J.; Birrer, M.; Cushman, K.; Duncanson, L.; Eck, C.; Falleger, C.; Imbach, B.; Král, K.; Krůček, M. New opportunities for forest remote sensing through ultra-high-density drone lidar. Surv. Geophys. 2019, 40, 959–977. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | Trial Age and Capture Date | Number of Trees and Height Statistics | |||||
|---|---|---|---|---|---|---|---|
| Estab. | Capture | Age at | N | Min. | Mean | Max. | |
| Date | Date | Capture (Yrs) | m | m | m | ||
| Rangipo | August 2016 | July 2019 | 3 | 1940 | 0.6 | 3.3 | 5.6 |
| Kaingaroa 861 | August 2015 | June 2018 | 3 | 1385 | 0.4 | 2.9 | 5.5 |
| Kaingaroa 127 | July 2016 | June 2019 | 3 | 938 | 0.7 | 2.5 | 4.3 |
| Scion: South | October 2015 | April 2019 | 3.5 | 613 | 1.4 | 4.2 | 6.1 |
| Scion: North | October 2016 | April 2019 | 2.5 | 875 | 0.34 | 1.7 | 3.1 |
| Scion: West | October 2019 | March 2020 | 0.4 | 865 | 0.12 | 0.4 | 0.61 |
| Total and mean | 6616 | 0.12 | 2.6 | 6.1 | |||
| SfM | Altitude (m) | Overlap % (Forward:Side) | Point Density (pt/m2) | Speed (m/s) | GSD (cm/pxl) |
| Rangipo | 74 | 90:80 | 580 | 3.5 | 1.9 |
| Kaingaroa 861 | 74 | 90:80 | 443 | 3.5 | 1.9 |
| Kaingaroa 127 | 74 | 90:80 | 573 | 3.5 | 1.9 |
| Scion: North and South | 60 | 85:80 | 939 | 3 | 1.6 |
| Scion: West | 74 | 90:80 | 410 | 3.5 | 2.0 |
| ULS | Altitude (m) | Line Spacing (m) | Point Density (pt/m2) | Speed (m/s) | |
| Rangipo | 45 | 16 | 638 | 5 | |
| Kaingaroa 861 | 45 | 16 | 649 | 5 | |
| Kaingaroa 127 | 45 | 16 | 631 | 5 | |
| Scion: North and South | 45 | 21 | 325 | 5 | |
| Scion: West | 45 | 10 | 487 | 5 | |
| Site | ULS | SfM Dataset | SfM with ULS DTM | ||||||
|---|---|---|---|---|---|---|---|---|---|
| R2 | RMSE | MBE | R2 | RMSE | MBE | R2 | RMSE | MBE | |
| m | m | m | m | m | m | ||||
| Rangipo | 0.97 | 0.15 | 0.06 | 0.87 | 0.56 | 0.48 | 0.88 | 0.47 | 0.38 |
| Kaingaroa 861 | 0.94 | 0.19 | 0.03 | 0.86 | 0.42 | 0.30 | 0.86 | 0.29 | 0.07 |
| Kaingaroa 127 | 0.94 | 0.17 | 0.06 | 0.79 | 0.53 | 0.44 | 0.81 | 0.53 | 0.45 |
| Scion: South | 0.97 | 0.17 | 0.03 | 0.80 | 0.61 | 0.40 | 0.81 | 0.60 | 0.45 |
| Scion: North | 0.95 | 0.11 | 0.00 | 0.76 | 0.37 | 0.31 | 0.75 | 0.27 | 0.18 |
| Scion: West | 0.27 | 0.13 | 0.10 | 0.05 | 0.31 | 0.29 | 0.02 | 0.37 | 0.35 |
| Mean | 0.99 | 0.15 | 0.05 | 0.94 | 0.48 | 0.38 | 0.95 | 0.43 | 0.32 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hartley, R.J.L.; Leonardo, E.M.; Massam, P.; Watt, M.S.; Estarija, H.J.; Wright, L.; Melia, N.; Pearse, G.D. An Assessment of High-Density UAV Point Clouds for the Measurement of Young Forestry Trials. Remote Sens. 2020, 12, 4039. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12244039
Hartley RJL, Leonardo EM, Massam P, Watt MS, Estarija HJ, Wright L, Melia N, Pearse GD. An Assessment of High-Density UAV Point Clouds for the Measurement of Young Forestry Trials. Remote Sensing. 2020; 12(24):4039. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12244039
Chicago/Turabian StyleHartley, Robin J. L., Ellen Mae Leonardo, Peter Massam, Michael S. Watt, Honey Jane Estarija, Liam Wright, Nathanael Melia, and Grant D. Pearse. 2020. "An Assessment of High-Density UAV Point Clouds for the Measurement of Young Forestry Trials" Remote Sensing 12, no. 24: 4039. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12244039