Design and Evaluation of a Permanently Installed Plane-Based Calibration Field for Mobile Laser Scanning Systems



Abstract
:
1. Introduction
- (a)
- Observation errors of the georeferencing sensors as well as model errors in the fusion of the georeferencing sensors in order to estimate the position and orientation of the system,
- (b)
- Observation errors of the mapping sensors due to the instrument, environmental conditions, measuring configuration, and object properties,
- (c)
- Errors w.r.t. the intrinsic sensor calibration (i.e., instrumental errors) as well as the extrinsic calibration between different sensors (i.e., lever arms and boresight angles),
- (d)
- Errors w.r.t. the time synchronization between different sensors.
2. Calibration and Evaluation of Mobile Laser Scanning Systems
2.1. Calibration of Mobile Laser Scanning Systems
2.2. Evaluation of Mobile Laser Scanning Systems
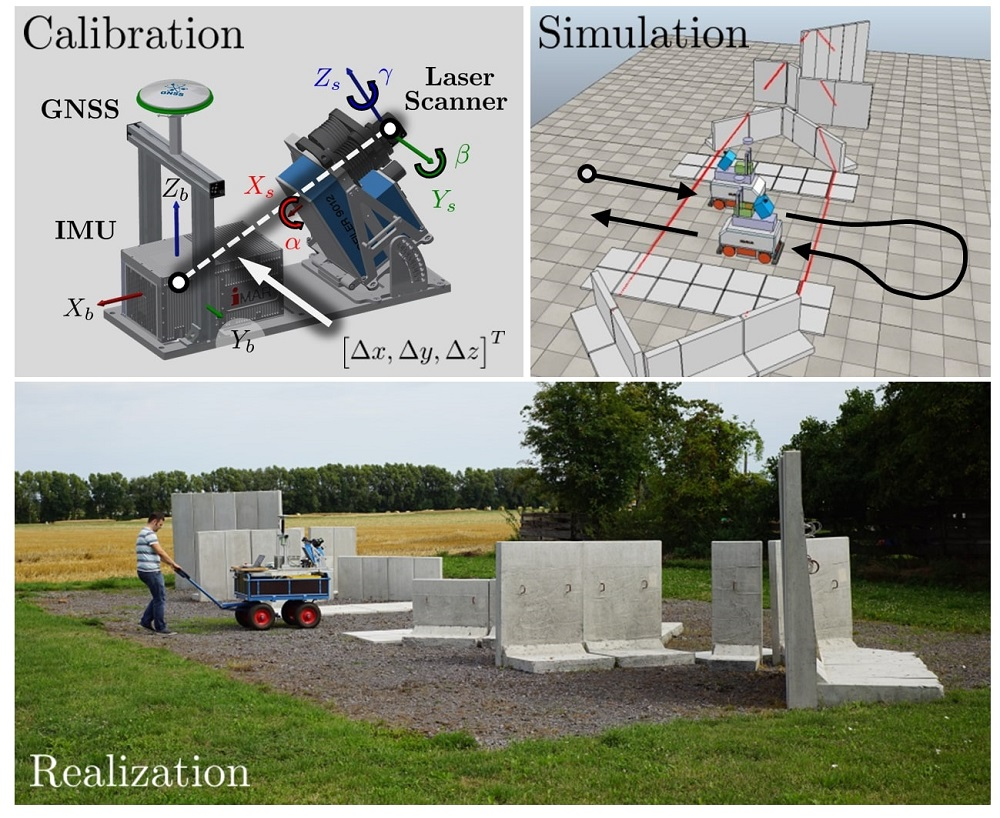
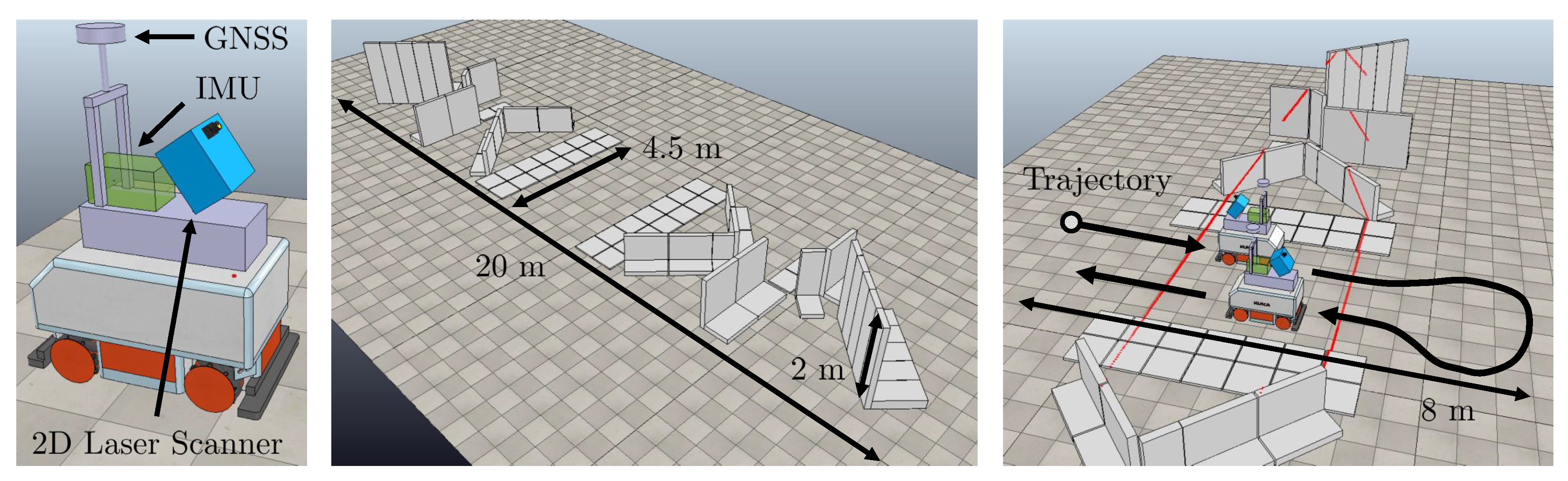
3. Mobile Laser Scanning System
4. Calibration Approach
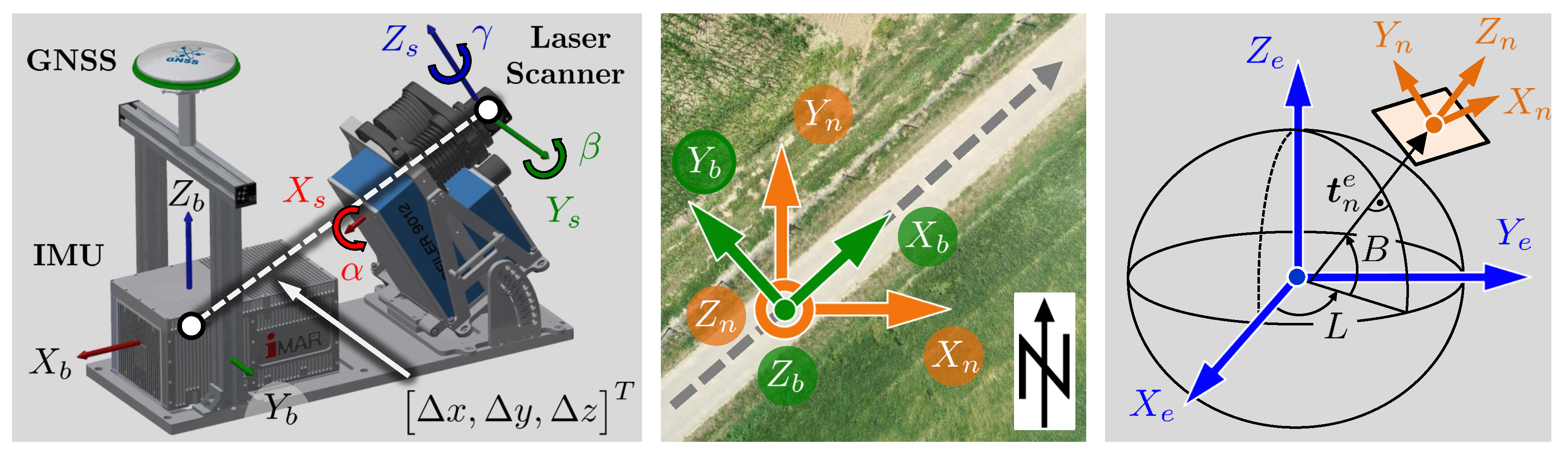
4.1. Calibration Parameters and Georeferencing Equation
4.2. Calibration Procedure
- (i)
- Significant reduction of the normal equation system enhancing the computational efficiency,
- (ii)
- Position and orientation of adjacent scan points are highly correlated and, thus, do not provide a new and independent information,
- (iii)
- Errors that might be induced by this simplification are negligible due to the high profile rate of the 2D laser scanner, the low speed of the platform, and the accuracy of the trajectory (e.g., at a speed of 0.75 and a profile rate of 200 Hz, the maximum position error is < 1 mm).
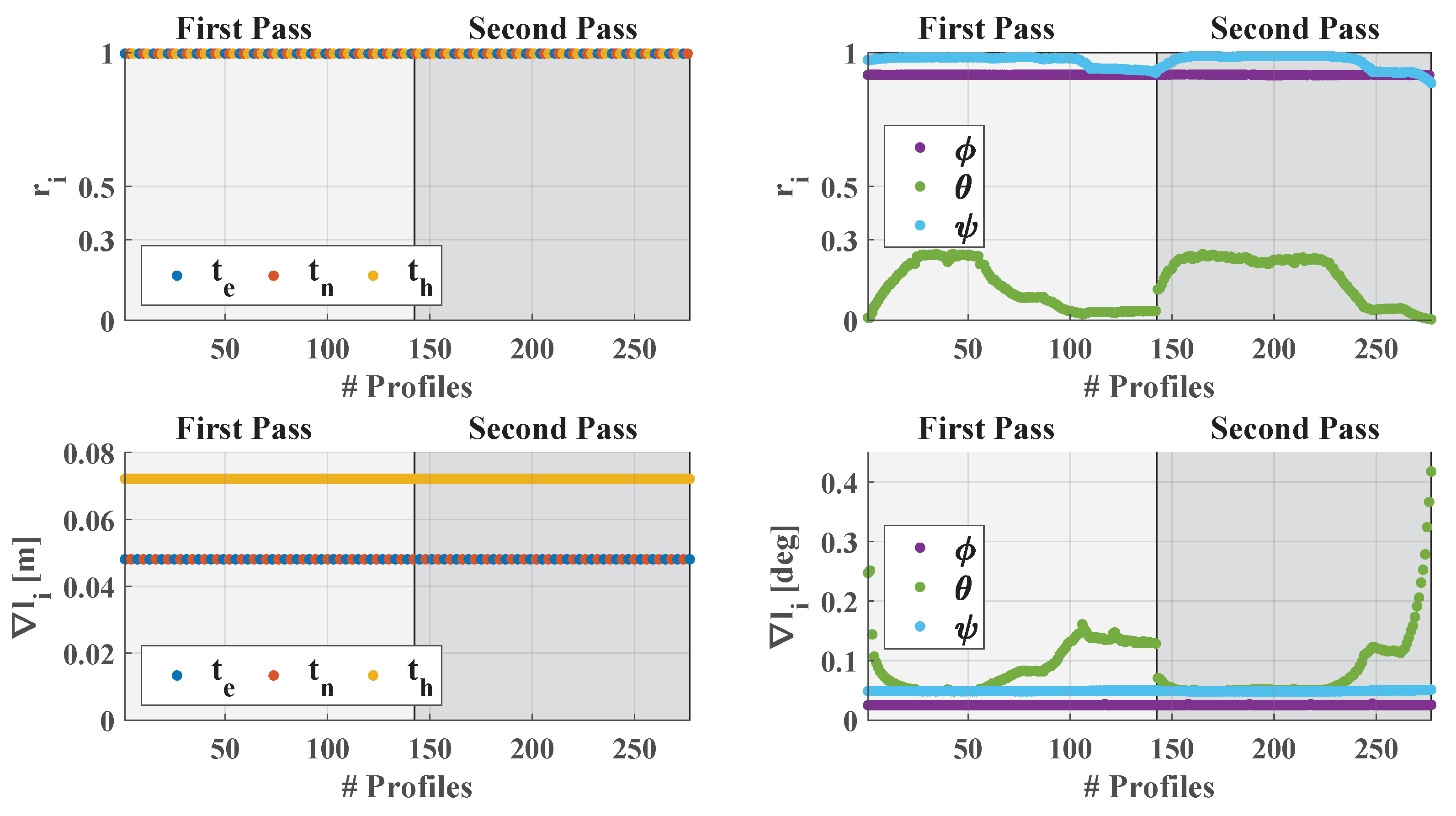
4.3. Quality Criteria for the Estimation of the Calibration Parameters
5. Simulation of the Calibration
5.1. Simulation Environment
- available area for the calibration field is 10 m × 20 m (cf. Figure 5, middle and right),
- fast and simple calibration procedure for mobile laser scanning systems (cf. Figure 5, right),
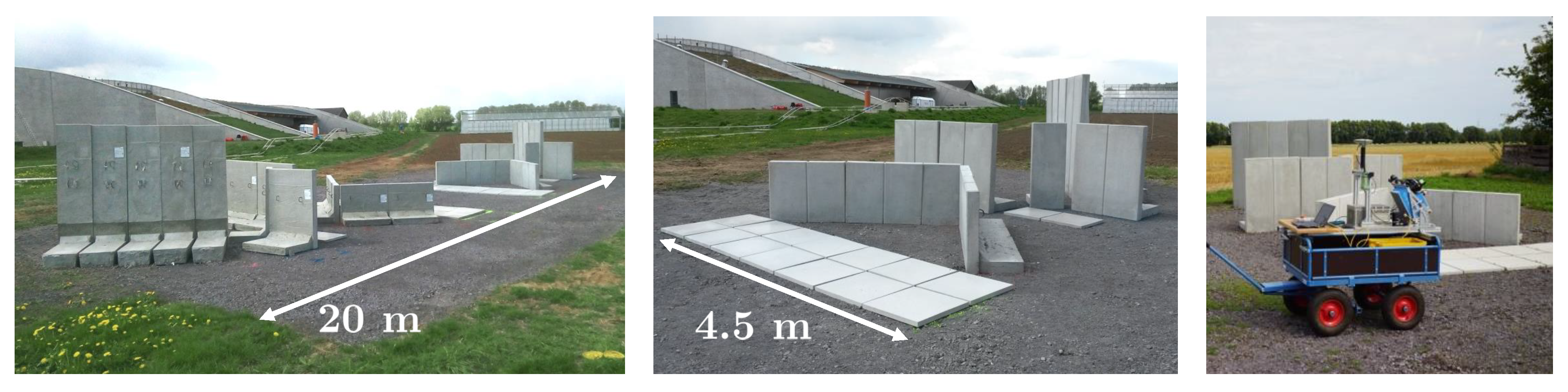
- for the reference planes we want to use standard face concrete elements as used for retaining walls in civil engineering (cf. Figure 5 and Section 6.1); such face concrete elements are highly planar, cost-effective, stable, and sufficiently robust for a permanent outdoor installation.
5.2. Simulation Results
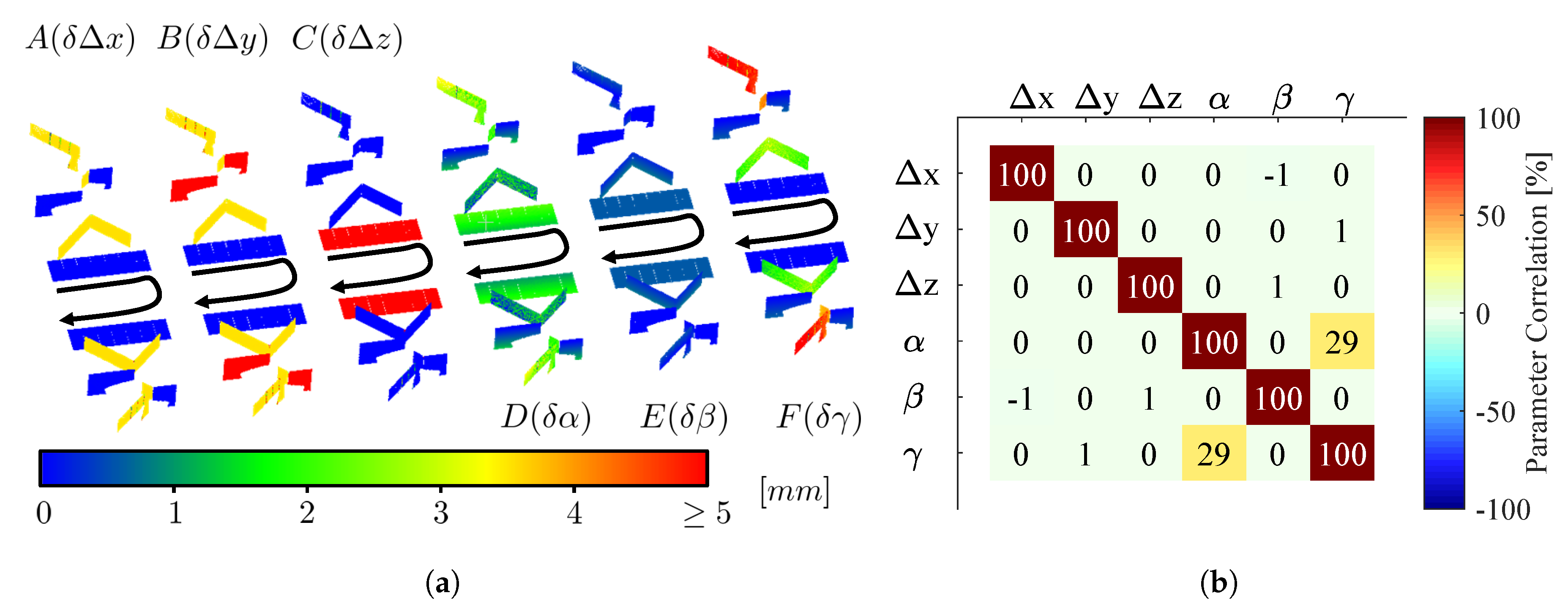
5.2.1. Sensitivity of the Plane Setup and Separability of the Calibration Parameters
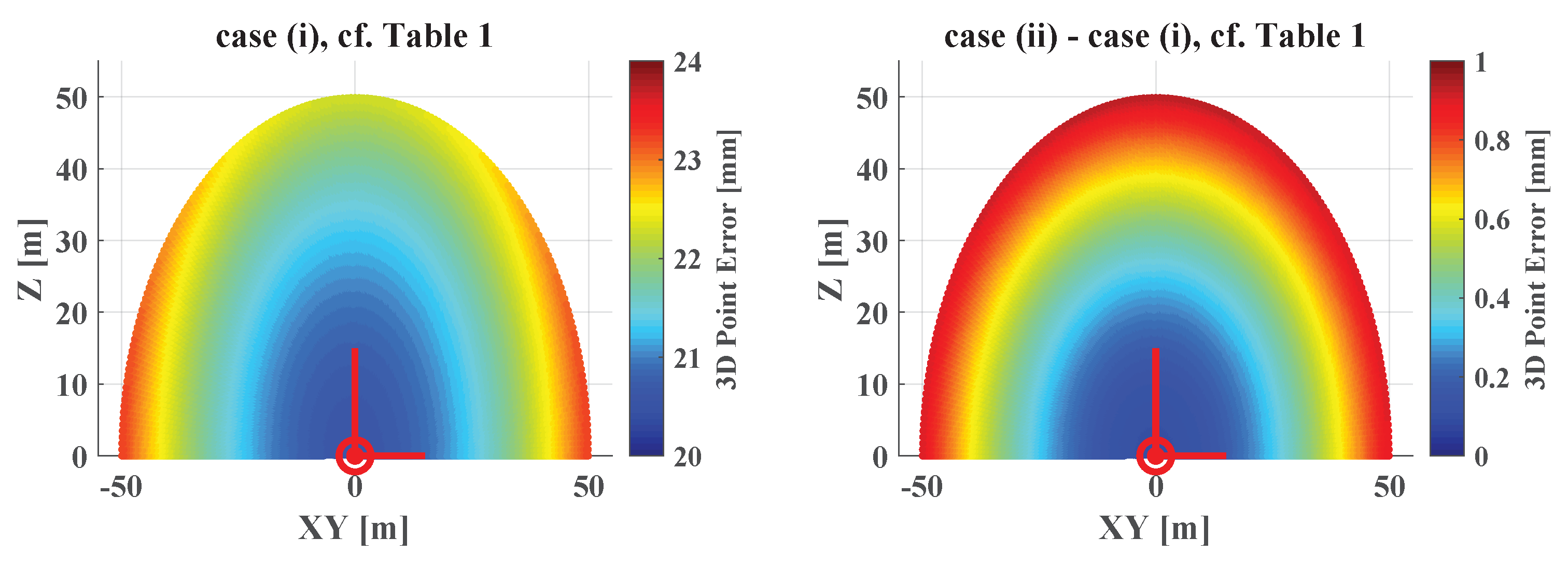
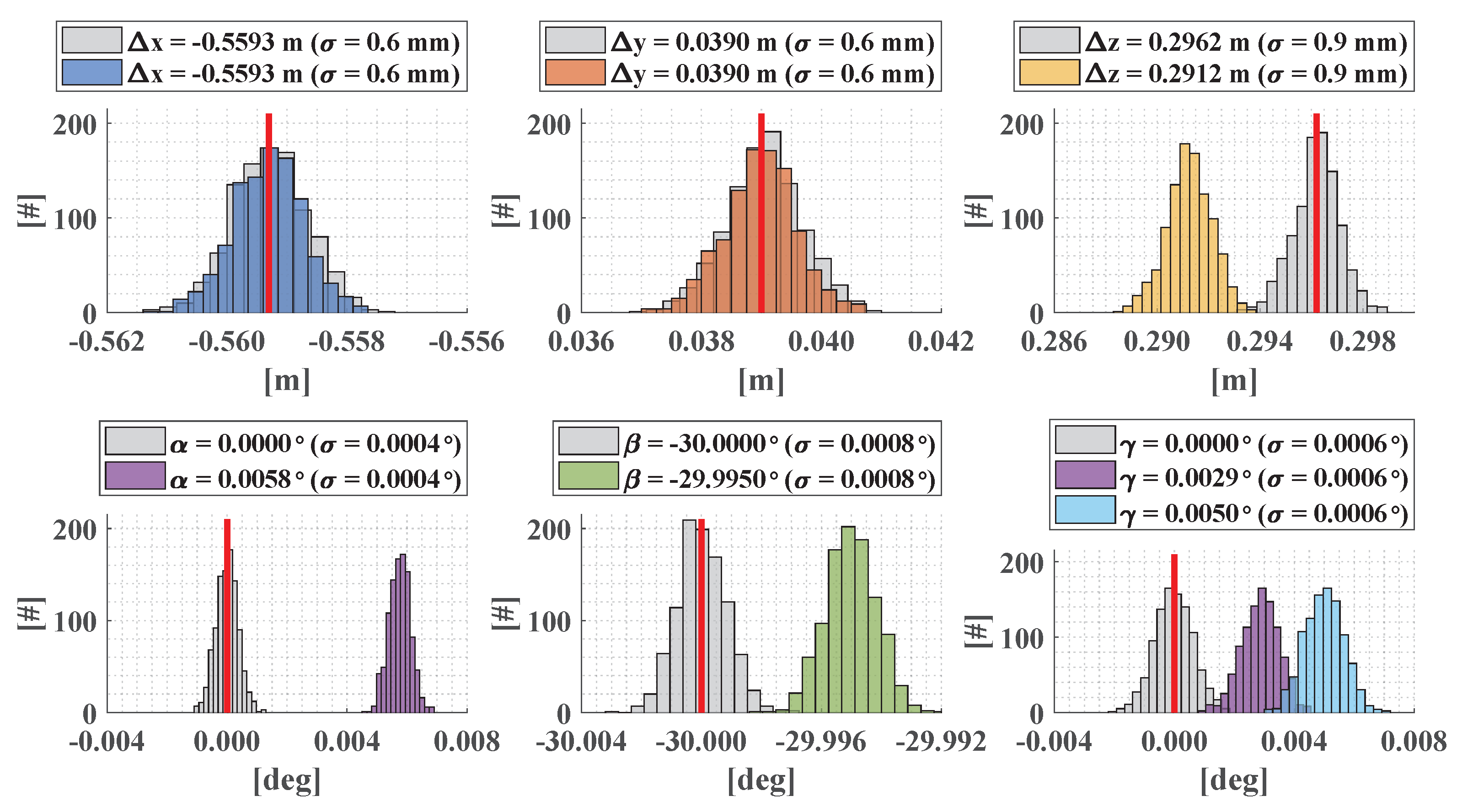
5.2.2. Impact of Random and Systematic Observation Errors
5.2.3. Impact of Gross Observation Errors
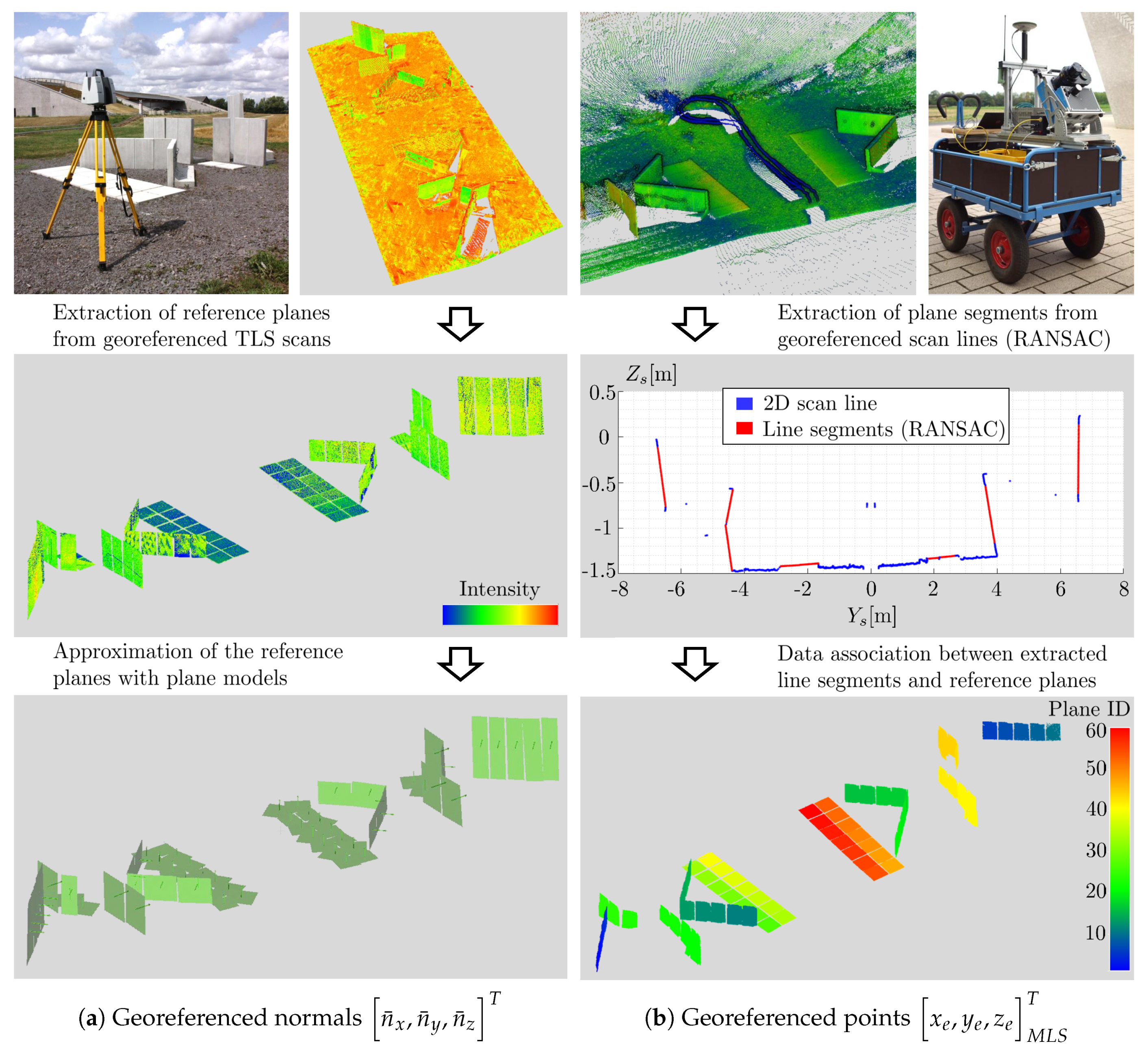
6. Calibration of the Mobile Laser Scanning System
6.1. Calibration Measurements
6.2. Calibration of Lever Arm and Boresight Angles
6.3. Calibration of Range Finder Offset
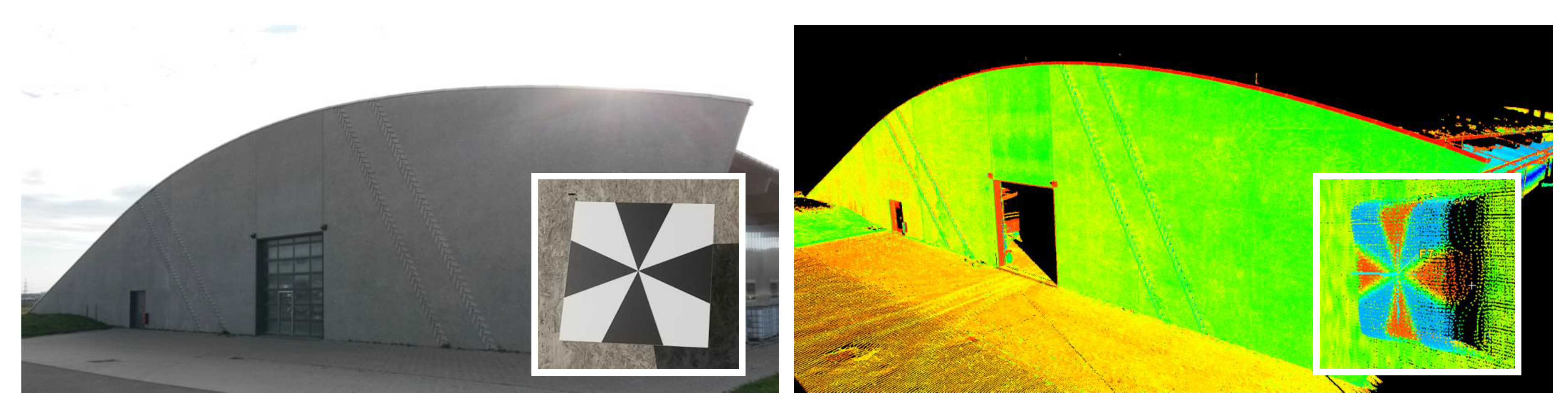
7. Evaluation of the Mobile Laser Scanning System
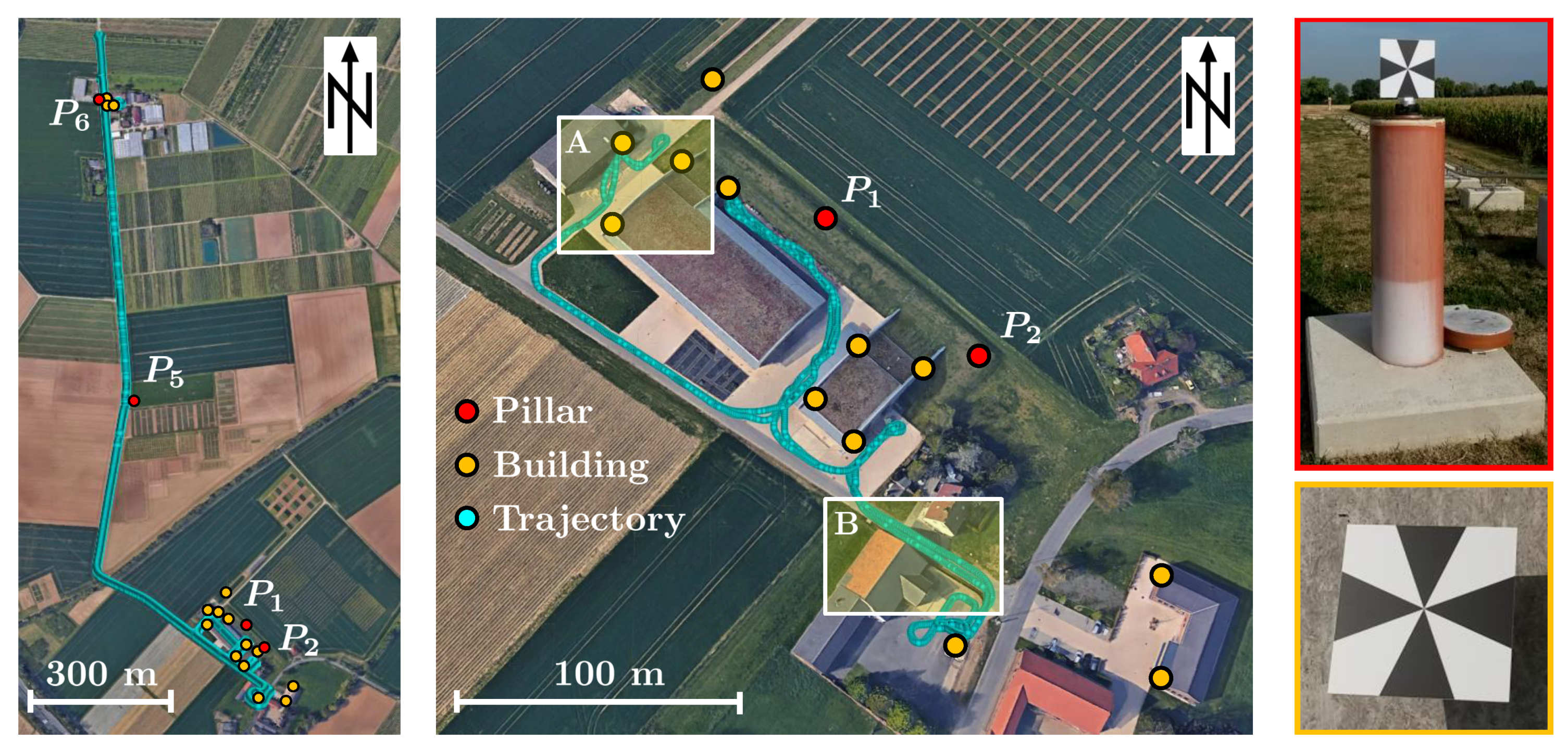
7.1. Evaluation Environment
7.2. Evaluation Measurements
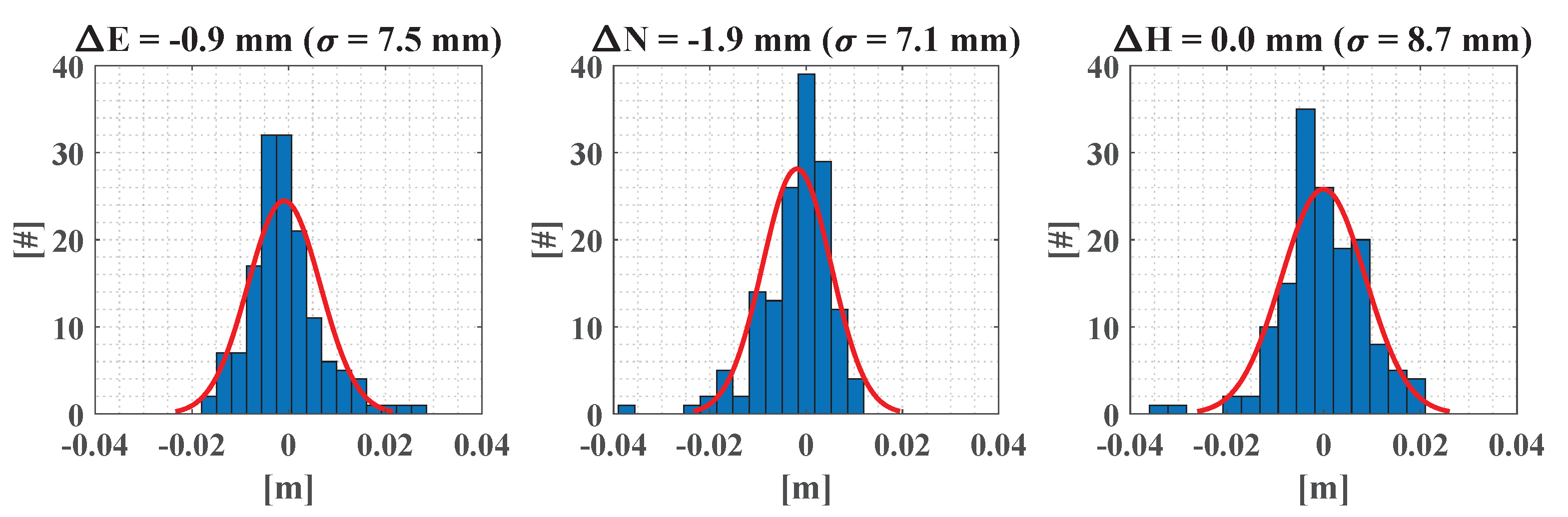
7.3. Point-Based Evaluation Using Control Points
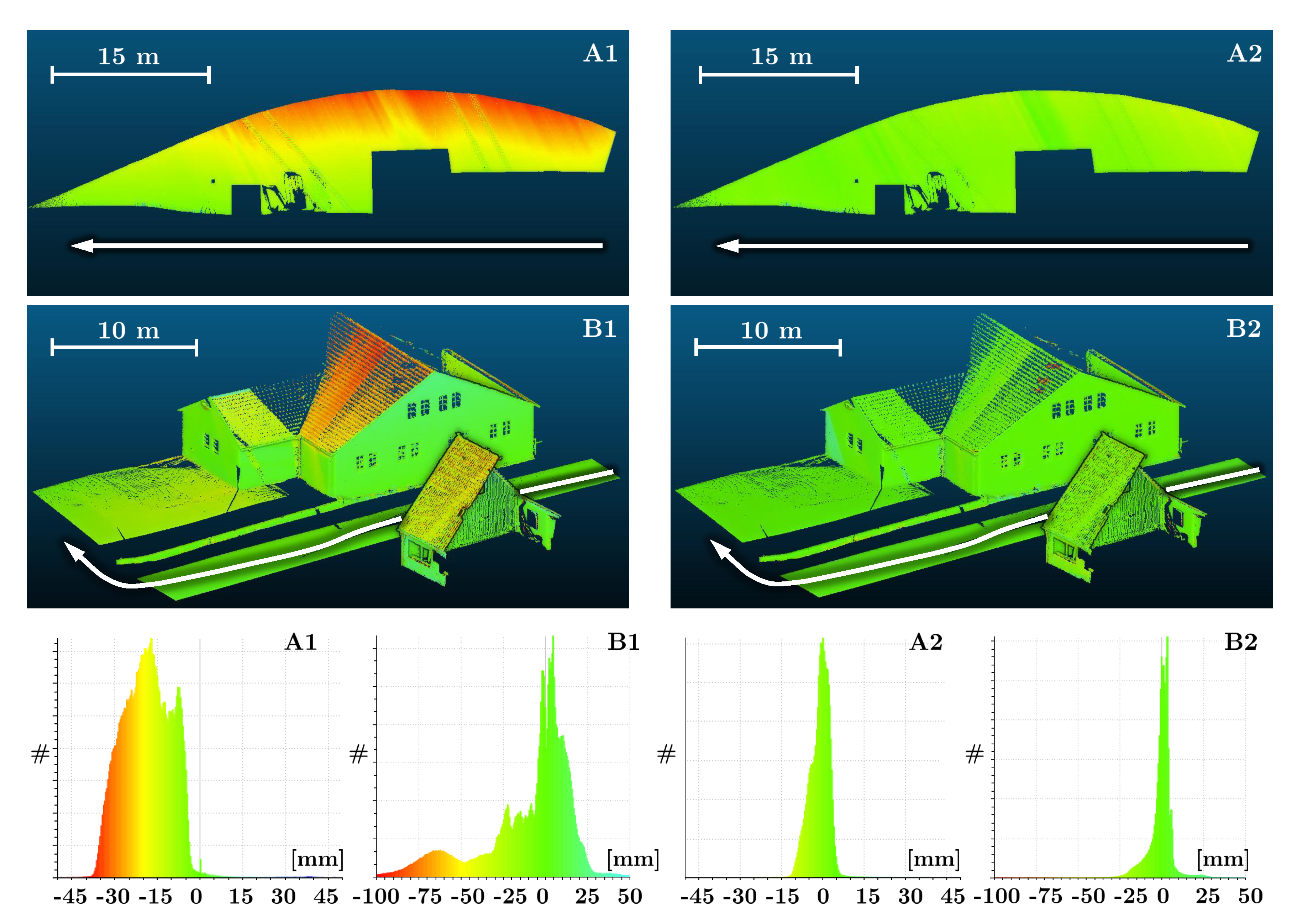
7.4. Area-Based Evaluation Using TLS Reference Point Clouds
8. Conclusions and Outlook
Author Contributions
Funding
Conflicts of Interest
References
- Williams, K.; Olsen, M.J.; Gene, V.R.; Glennie, C. Synthesis of Transportation Applications of Mobile LIDAR. Remote Sens. 2013, 5, 4652–4692. [Google Scholar] [CrossRef] [Green Version]
- Guan, H.; Li, J.; Cao, S.; Yu, Y. Use of mobile LiDAR in road information inventory: A review. Int. J. Image Data Fusion 2016, 7, 219–242. [Google Scholar] [CrossRef]
- Gargoum, S.A.; El Basyouny, K. A literature synthesis of LiDAR applications in transportation: Feature extraction and geometric assessments of highways. GISci. Remote Sens. 2019, 56, 864–893. [Google Scholar] [CrossRef]
- Soilán, M.; Sánchez-Rodríguez, A.; del Río-Barral, P.; Perez-Collazo, C.; Arias, P.; Riveiro, B. Review of Laser Scanning Technologies and Their Applications for Road and Railway Infrastructure Monitoring. Infrastructures 2019, 4, 58. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Chen, Q.; Zhu, Q.; Liu, L.; Li, C.; Zheng, D. A Survey of Mobile Laser Scanning Applications and Key Techniques over Urban Areas. Remote Sens. 2019, 11, 1540. [Google Scholar] [CrossRef] [Green Version]
- Puente, I.; González-Jorge, H.; Martínez-Sánchez, J.; Arias, P. Review of mobile mapping and surveying technologies. Measurement 2013, 46, 2127–2145. [Google Scholar] [CrossRef]
- Strübing, T.; Neumann, I. Positions- und Orientierungsschätzung von LIDAR-Sensoren auf Multisensorplattformen. Z. Für Geodäsie Geoinf. Und Landmanag. (ZfV) 2013, 138, 210–221. [Google Scholar]
- Filin, S. Recovery of Systematic Biases in Laser Altimetry Data Using Natural Surfaces. Photogramm. Eng. Remote Sens. 2003, 69, 1235–1242. [Google Scholar] [CrossRef]
- Lu, X.; Feng, C.; Ma, Y.; Yang, F.; Shi, B.; Su, D. Calibration method of rotation and displacement systematic error for ship-borne mobile surveying systems. Surv. Rev. 2017, 51, 78–86. [Google Scholar] [CrossRef]
- Heinz, E.; Eling, C.; Wieland, M.; Klingbeil, L.; Kuhlmann, H. Development, Calibration and Evaluation of a Portable and Direct Georeferenced Laser Scanning System for Kinematic 3D Mapping. J. Appl. Geod. 2015, 9, 227–243. [Google Scholar] [CrossRef]
- Heinz, E.; Eling, C.; Wieland, M.; Klingbeil, L.; Kuhlmann, H. Analysis of different reference plane setups for the calibration of a mobile laser scanning system. In Ingenieurvermessung 17, Beiträge zum 18. Internationalen Ingenieurvermessungskurs, Graz, Österreich; Lienhart, W., Ed.; Wichmann Verlag: Berlin, Germany, 2017; pp. 131–145. [Google Scholar]
- Hong, S.; Park, I.; Lee, J.; Lim, K.; Choi, Y.; Sohn, H.G. Utilization of a Terrestrial Laser Scanner for the Calibration of Mobile Mapping Systems. Sensors 2017, 17, 474. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hartmann, J.; Paffenholz, J.A.; Strübing, T.; Neumann, I. Determination of Position and Orientation of LiDAR Sensors on Multisensor Platforms. J. Surv. Eng. 2017, 143. [Google Scholar] [CrossRef]
- Niemeier, W. Ausgleichungsrechnung—Statistische Auswertemethoden (2., überarbeitete und erweiterte Auflage); de Gruyter: Berlin, Germany; New York, NY, USA, 2008. [Google Scholar]
- Förstner, W.; Wrobel, B. Photogrammetric Computer Vision—Statistics, Geometry, Orientation and Reconstruction; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar]
- Glennie, C. Rigorous 3D error analysis of kinematic scanning LIDAR systems. J. Appl. Geod. 2007, 1, 147–157. [Google Scholar] [CrossRef]
- Mezian, M.; Vallet, B.; Soheilian, B.; Paparoditis, N. Uncertainty Propagation For Terrestrial Mobile Laser Scanner. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 331–335. [Google Scholar] [CrossRef]
- Hauser, D.; Glennie, C.; Brooks, B. Calibration and Accuracy Analysis of a Low-Cost Mapping-Grade Mobile Laser Scanning System. J. Surv. Eng. 2016, 142, 04016011. [Google Scholar] [CrossRef]
- Barber, D.; Mills, J.; Smith-Voysey, S. Geometric validation of a ground-based mobile laser scanning system. ISPRS J. Photogramm. Remote Sens. 2008, 63, 128–141. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Kukko, A.; Jaakkola, A.; Hyyppä, H. Benchmarking the Performance of Mobile Laser Scanning Systems Using a Permanent Test Field. Sensors 2012, 12, 12814–12835. [Google Scholar] [CrossRef] [Green Version]
- Hofmann, S.; Brenner, C. Accuracy assessment of Mobile Mapping Point Clouds Using the Existing Environment as Terrestrial Reference. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci.-ISPRS Arch. 2016, 41, 601–608. [Google Scholar] [CrossRef] [Green Version]
- Teunissen, P.J.G.; Montenbruck, O. (Eds.) Springer Handbook of Global Navigation Satellite Systems; Springer International Publishing: Cham, Switzerland, 2017. [Google Scholar]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, 2nd ed.; Artech House: Boston, MA, USA; London, UK, 2013. [Google Scholar]
- Vosselman, G.; Maas, H.G. Airborne and Terrestrial Laser Scanning; CRC Press, Whittles Publishing: Dunbeath, Scotland, 2010; ISBN 9781439827987. [Google Scholar]
- Holst, C.; Neuner, H.; Wieser, A.; Wunderlich, T.; Kuhlmann, H. Calibration of Terrestrial Laser Scanners. Allg. Vermess.-Nachrichten (AVN) 2016, 123, 147–157. [Google Scholar]
- Gräfe, G. Kinematische Anwendungen von Laserscannern im Straßenraum. Ph.D. Thesis, Gottfried Wilhelm Leibniz Universität Hannover, Fakultät für Bauingenieurwesen und Geodäsie, Hanover, Germany, 2007. [Google Scholar]
- Brüggemann, T.; Artz, T.; Weiß, R. Kalibrierung von Multisensorsystemen. In Schriftenreihe des DVW, Band 91, Hydrographie 2018 – Trend zu Unbemannten Messsystemen; Wißner Verlag: Augsburg, Germany, 2018; pp. 29–46. [Google Scholar]
- Hesse, C. Hochauflösende kinematische Objekterfassung mit terrestrischen Laserscannern. Ph.D. Thesis, Gottfried Wilhelm Leibniz Universität Hannover, Fakultät für Bauingenieurwesen und Geodäsie, Hanover, Germany, 2007. [Google Scholar]
- Vennegeerts, H. Objektraumgestützte kinematische Georeferenzierung für Mobile-Mapping-Systeme. Ph.D. Thesis, ottfried Wilhelm Leibniz Universität Hannover, Fakultät für Bauingenieurwesen und Geodäsie, Hanover, Germany, 2011. [Google Scholar]
- Eling, C.; Klingbeil, L.; Wieland, M.; Kuhlmann, H. Direct Georeferencing of Micro Aerial Vehicles - System Design, System Calibration and First Evaluation Tests. Photogramm. Fernerkund. Geoinf. (PFG) 2014, 2014, 227–237. [Google Scholar] [CrossRef]
- Talaya, J.; Alamus, B.; Bosch, E.; Serra, A.; Kornus, W.; Baron, A. Integration of a terrestrial laser scanner with GPS/IMU orientation sensors. In Proceedings of the XXth ISPRS Congress, Istanbul, Turkey, 12–23 July 2004. [Google Scholar]
- Sheehan, M.; Harrison, A.; Newman, P. Self-calibration for a 3D laser. Int. J. Robot. Res. 2011, 31, 675–687. [Google Scholar] [CrossRef] [Green Version]
- Elseberg, J.; Borrmann, D.; Nüchter, A. Algorithmic Solutions for Computing Precise Maximum Likelihood 3D Point Clouds from Mobile Laser Scanning Platforms. Remote Sens. 2013, 5, 5871–5906. [Google Scholar] [CrossRef] [Green Version]
- Keller, F. Entwicklung eines forschungsorientierten Multi-Sensor-Systems zum kinematischen Laserscanning innerhalb von Gebäuden. Ph.D. Thesis, HafenCity Universität Hamburg, Arbeitsgebiet Ingenieurgeodäsie und geodätische Messtechnik, Hamburg, Germany, 2015. [Google Scholar]
- Nüchter, A.; Borrmann, D.; Elseberg, J.; Redondo, D. A Backpack-mounted 3D Mobile Scanning System. Allg. Vermess.-Nachrichten (AVN) 2015, 122, 301–307. [Google Scholar]
- Nüchter, A.; Borrmann, D.; Koch, P.; Kühn, M.; May, S. A Man-Portable, IMU-Free Mobile Mapping System. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences (ISPRS Geospatial Week 2015), La Grande Motte, France, 28 September–3 October 2015; Volume II-3/W5. [Google Scholar]
- Hillemann, M.; Weinmann, M.; Mueller, M.S.; Jutzi, B. Automatic Extrinsic Self-Calibration of Mobile Mapping Systems Based on Geometric 3D Features. Remote Sens. 2019, 11, 1955. [Google Scholar] [CrossRef] [Green Version]
- Maddern, W.; Harrison, A.; Newman, P. Lost in Translation (and Rotation): Rapid Extrinsic Calibration for 2D and 3D LIDARs. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–19 May 2012. [Google Scholar]
- Maddern, W.; Pascoe, G.; Linegar, C.; Newman, P. 1 year, 1000 km: The Oxford RobotCar dataset. Int. J. Robot. Res. 2017, 36, 3–15. [Google Scholar] [CrossRef]
- Hillemann, M.; Meidow, J.; Jutzi, B. Impact of different trajectories on extrinsic self-calibration for vehicle-based mobile laser scanning systems. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, PIA19+MRSS19 - Photogrammetric Image Analysis & Munich Remote Sensing Symposium, Munich, Germany, 18–20 September 2019; Volume XLII-2/W16. [Google Scholar]
- Levinson, J.; Thrun, S. Unsupervised Calibration for Multi-beam Lasers. In Experimental Robotics. Springer Tracts in Advanced Robotics; Khatib, O., Kumar, V., Sukhatme, G., Eds.; Springer: Berlin/Heidelberg, Germany, 2014; Volume 79, pp. 179–193. [Google Scholar]
- Keller, F.; Sternberg, H. Multi-Sensor Platform for Indoor Mobile Mapping: System Calibration and Using a Total Station for Indoor Applications. Remote Sens. 2013, 5, 5805–5824. [Google Scholar] [CrossRef] [Green Version]
- Sternberg, H.; Keller, F.; Willemsen, T. Precise indoor mapping as a basis for coarse indoor navigation. J. Appl. Geod. 2013, 7, 231–246. [Google Scholar] [CrossRef]
- Li, Z.; Tan, J.; Liu, H. Rigorous Boresight Self-Calibration of Mobile and UAV LiDAR Scanning Systems by Strip Adjustment. Remote Sens. 2019, 11, 442. [Google Scholar] [CrossRef] [Green Version]
- Friess, P. Toward a rigorous methodology for airborne laser mapping. In Proceedings of the International Calibration and Validation Workshop EuroCOW, Castelldefels, Spain, 25–27 January 2006. [Google Scholar]
- Skaloud, J.; Lichti, D. Rigorous approach to bore-sight self-calibration in airborne laser scanning. ISPRS J. Photogramm. Remote Sens. 2006, 61, 47–59. [Google Scholar] [CrossRef]
- Lindenthal, S.M.; Ussyshkin, V.R.; Wang, J.G.; Pokorny, M. Airborne LIDAR: A fully-automated self-calibration procedure. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences (ISPRS Calgary 2011 Workshop), Calgary, AB, Canada, 29–31 August 2011; Volume XXXVIII-5/W12. [Google Scholar]
- Ravi, R.; Shamseldin, T.; Elbahnasawy, M.; Lin, Y.J.; Habib, A. Bias Impact Analysis and Calibration of UAV-Based Mobile LiDAR System With Spinning Multi-Beam Laser Scanner. Appl. Sci. 2018, 8, 297. [Google Scholar] [CrossRef] [Green Version]
- Keyetieu, R.; Seube, N. Automatic Data Selection and Boresight Adjustment of LiDAR Systems. Remote Sens. 2019, 11, 1087. [Google Scholar] [CrossRef] [Green Version]
- Rieger, P.; Studnicka, N.; Pfennigbauer, M.; Zach, G. Boresight alignment method for mobile laser scanning systems. J. Appl. Geod. 2010, 4, 13–21. [Google Scholar] [CrossRef]
- Glennie, C. Calibration and Kinematic Analysis of the Velodyne HDL-64E S2 Lidar Sensor. Photogramm. Eng. Remote Sens. 2012, 78, 339–347. [Google Scholar] [CrossRef]
- Chan, T.O.; Licht, D.D.; Glennie, C.L. Multi-feature based boresight self-calibration of a terrestrial mobile mapping system. ISPRS J. Photogramm. Remote Sens. 2013, 82, 112–124. [Google Scholar] [CrossRef]
- Hartmann, J.; von Gösseln, I.; Schild, N.; Dorndorf, A.; Paffenholz, J.A.; Neumann, I. Optimisation of the calibration process of a k-tls based multi-sensor-system by genetic algorithms. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences (2019 ISPRS Geospatial Week 2019), Enschede, The Netherlands, 10–14 June 2019; Volume XLII-2/W13, pp. 1655–1662. [Google Scholar]
- Chen, S.; Liu, J.; Wu, T.; Huang, W.; Liu, K.; Yin, D.; Liang, X.; Hyyppä, J.; Chen, R. Extrinsic Calibration of 2D Laser Rangefinders Based on a Mobile Sphere. Remote Sens. 2018, 10, 1176. [Google Scholar] [CrossRef] [Green Version]
- Vennegeerts, H.; Martin, J.; Becker, M.; Kutterer, H. Validation of a kinematic laserscanning system. J. Appl. Geod. 2008, 2, 79–84. [Google Scholar] [CrossRef] [Green Version]
- Kukko, A.; Kaartinen, H.; Hyyppä, J.; Chen, Y. Multiplatform Mobile Laser Scanning: Usability and Performance. Sensors 2012, 12, 11712–11733. [Google Scholar] [CrossRef] [Green Version]
- Schlichting, A.; Brenner, C.; Schön, S. Bewertung von Inertial/GNSS-Modulen mittels Laserscannern und bekannter Landmarken. Photogramm. Fernerkundung Geoinf. (PFG) 2014, 2014, 5–15. [Google Scholar] [CrossRef]
- Mao, Q.; Zhang, L.; Li, Q.; Hu, Q.; Yu, J.; Feng, S.; Ochieng, W.; Gong, H. A Least Squares Collocation Method for Accuracy Improvement of Mobile LiDAR Systems. Remote Sens. 2015, 7, 7402–7424. [Google Scholar] [CrossRef] [Green Version]
- Heinz, E.; Eling, C.; Klingbeil, L.; Kuhlmann, H. On the applicability of a scan-based mobile mapping system for monitoring the planarity and subsidence of road surfaces—Pilot study on the A44n motorway in Germany. J. Appl. Geod. 2020, 14, 39–54. [Google Scholar] [CrossRef]
- Haala, N.; Peter, M.; Kremer, J.; Hunter, G. Mobile LIDAR mapping for 3D point cloud collection in urban areas—A performance test. In Proceedings of the ISPRS Archives—Volume XXXVII Part B5, XXIst ISPRS Congress, Beijing, China, 3–11 July 2008; pp. 1119–1124. [Google Scholar]
- Bureick, J.; Vogel, S.; Neumann, I.; Unger, J.; Alkhatib, H. Georeferencing of an Unmanned Aerial System by Means of an Iterated Extended Kalman Filter Using a 3D City Model. PFG - J. Photogramm. Remote Sens. Geoinf. Sci. 2019. [Google Scholar] [CrossRef] [Green Version]
- Dehbi, Y.; Lucks, L.; Behmann, J.; L., K.; Plümer, L. Improving GPS Trajectories Using 3D City Models and Kinematic Point Clouds. In Proceedings of the 4th International Conference on Smart Data and Smart Cities, ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Science, Kuala Lumpur, Malaysia, 1–3 October 2019; Volume IV-4/W9, pp. 35–42. [Google Scholar]
- Toschi, I.; Rodríguez-Gonzálvez, P.; Remondino, F.; Minto, S.; Orlandini, S.; Fuller, A. Accuracy Evaluation of a Mobile Mapping System with Advanced Statistical Methods. In Proceedings of the 3D Virtual Reconstruction and Visualization of Complex Architectures, Avila, Spain, 25–27 February 2015; Volume XL-5/W4, pp. 245–253. [Google Scholar]
- Hartmann, J.; Trusheim, P.; Alkhatib, H.; Paffenholz, J.A.; Diener, D.; Neumann, I. High Accurate Pointwise (Geo-)Referencing of a k-TLS Based Multi-Sensor-System. In Proceedings of the 2018 ISPRS TC IV Mid-Term Symposium 3D Spatial Information Science—The Engine of Change, Delft, The Netherlands, 1–5 October 2018. [Google Scholar]
- Tucci, G.; Visintini, D.; Bonora, V.; Parisi, E.I. Examination of Indoor Mobile Mapping Systems in a Diversified Internal/External Test Field. Appl. Sci. 2018, 8, 401. [Google Scholar] [CrossRef] [Green Version]
- Kalenjuk, S.; Rebhan, M.J.; Lienhart, W.; Marte, R. Large-scale monitoring of retaining structures: New approaches on the safety assessment of retaining structures using mobile mapping. In Proceedings SPIE, Sensors and Smart Structures Technologies for Civil, Mechanical and Aerospace Systems 2019; International Society for Optics and Photonics: Bellingham, WA, USA, 2019; Volume 10970. [Google Scholar]
- IMAR Navigation GmbH. Inertial Navigation System iNAV-FJI-LSURV. Technical Report. Available online: http://www.imar.de/index.php/en/products/by-product-names (accessed on 6 February 2020).
- NovAtel Inc. Waypoint Inertial Explorer 8.80 Post Processing Software. 2019. Available online: http://www2.novatel.com/waypointrelease (accessed on 19 October 2019).
- Zoller & Fröhlich GmbH. Z+F Profiler 9012A, 2D Laser Scanner. Technical report. Available online: http://www.zf-laser.com (accessed on 6 February 2020).
- Heinz, E.; Mettenleiter, M.; Kuhlmann, H.; Holst, C. Strategy for Determining the Stochastic Distance Characteristics of the 2D Laser Scanner Z+F Profiler 9012A with Special Focus on the Close Range. Sensors 2018, 18, 2253. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Holst, C.; Artz, T.; Kuhlmann, H. Biased and unbiased estimates based on laser scans of surfaces with unknown deformations. J. Appl. Geod. 2014, 8, 169–184. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Förstner, W. Ein Verfahren zur Schätzung von Varianz- und Kovarianzkomponenten. Allg. Vermess.-Nachrichten (AVN) 1979, 86, 446–453. [Google Scholar]
- Förstner, W. Reliability Analysis of Parameter Estimation in Linear Models with Applications to Mensuration Problems in Computer Vision. Comput. Vis. Graph. Image Process. 1987, 40, 273–310. [Google Scholar] [CrossRef]
- Baarda, W. Statistical Concepts in Geodesy; Netherlands Geodetic Commission, Publications on Geodesy, New Series; Netherlands Geodetic Commission: Delft, The Netherlands, 1967; Volume 2, Number 4. [Google Scholar]
- Baarda, W. A Testing Procedure for Use in Geodetic Networks; Netherlands Geodetic Commission, Publications on Geodesy, New Series; Netherlands Geodetic Commission: Delft, The Netherlands, 1968; Volume 2, Number 5. [Google Scholar]
- Medić, T.; Kuhlmann, H.; Holst, C. Designing and Evaluating a User-Oriented Calibration Field for the Target-Based Self-Calibration of Panoramic Terrestrial Laser Scanners. Remote Sens. 2020, 12, 15. [Google Scholar] [CrossRef] [Green Version]
- Dupuis, J.; Holst, C.; Kuhlmann, H. Improving the Kinematic Calibration of a Coordinate Measuring Arm using Configuration Analysis. Precis. Eng. 2017, 50, 171–182. [Google Scholar] [CrossRef]
- Leek, J.; Artz, T.; Nothnagel, A. Optimized scheduling of VLBI UT1 intensive sessions for twin telescopes employing impact factor analysis. J. Geod. 2015, 89, 911–924. [Google Scholar] [CrossRef]
- Robotics, C. V-REP—Virtual Robot Experimentation Platform. Technical Report. Available online: http://www.coppeliarobotics.com/ (accessed on 2 October 2019).
- Holst, C.; Medic, T.; Kuhlmann, H. Dealing with systematic laser scanner errors due to misalignment at area-based deformation analyses. J. Appl. Geod. 2018, 12, 169–185. [Google Scholar] [CrossRef]
- Janßen, J.; Medic, T.; Kuhlmann, H.; Holst, C. Decreasing the Uncertainty of the Target Center Estimation at Terrestrial Laser Scanning by Choosing the Best Algorithm and by Improving the Target Design. Remote Sens. 2019, 11, 845. [Google Scholar] [CrossRef] [Green Version]
- Bundesamt für Kartographie und Geodäsie (BKG). Quasigeoid der Bundesrepublik Deutschland—GCG2016 (German Combined QuasiGeoid 2016); Technical report. Available online: https://sg.geodatenzentrum.de/web_public/gdz/dokumentation/deu/quasigeoid.pdf (accessed on 6 February 2020).
- Heunecke, O.; Kuhlmann, H.; Welsch, W.; Eichhorn, A.; Neuner, H. Handbuch Ingenieurgeodäsie: Auswertung geodätischer Überwachungsmessungen (2., neu bearbeitete und erweiterte Auflage); Wichmann Verlag: Berlin/Offenbach am Main, Germany, 2013. [Google Scholar]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (N-Z). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef] [Green Version]
- Cloud Compare. 3D Point Cloud and Mesh Processing Software—Open Source Project. Technical report. Available online: https://www.danielgm.net/cc/ (accessed on 6 February 2020).
- Zhang, Q.; Pless, R. Extrinsic Calibration of a Camera and Laser Range Finder (improves camera calibration). In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan, 28 September–2 October 2004; pp. 2301–2306. [Google Scholar]
- Unnikrishnan, R.; Hebert, M. Fast Extrinsic Calibration of a Laser Rangefinder to a Camera; Technical report; Robotics Institute, Carnegie Mellon University: Pittsburgh, PA, USA, 2005. [Google Scholar]
- Geiger, A.; Moosmann, F.; Car, O.; Schuster, B. Automatic Camera and Range Sensor Calibration using a single Shot. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–18 May 2012; pp. 3936–3943. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position | Orientation | 2D Laser Scanner | Calibration Parameters | ||||||
|---|---|---|---|---|---|---|---|---|---|
| , | , | , | , , | ||||||
| (i) Obs | 0.01 m | 0.015 m | 0.005 | 0.010 | 0.001 m | 0.005 | – | – | – |
| (ii) Obs + Cal | 0.01 m | 0.015 m | 0.005 | 0.010 | 0.001 m | 0.005 | 0.001 m | 0.0015 m | 0.005 |
| Block | Date | GPS Time | Runs | Block | Date | GPS Time | Runs |
|---|---|---|---|---|---|---|---|
| 1 | 31/07/19 | 01:40 p.m.–01:55 p.m. | 14 | 3 | 05/08/19 | 10:30 a.m.–10:50 a.m. | 31 |
| 2 | 05/08/19 | 09:05 a.m.–09:25 a.m. | 21 | 4 | 05/08/19 | 11:45 a.m.–12:10 p.m. | 32 |
| Parameter | ||||||
|---|---|---|---|---|---|---|
| Target Accuracy | 1.0 mm | 1.0 mm | 1.5 mm | 0.0050 | 0.0050 | 0.0050 |
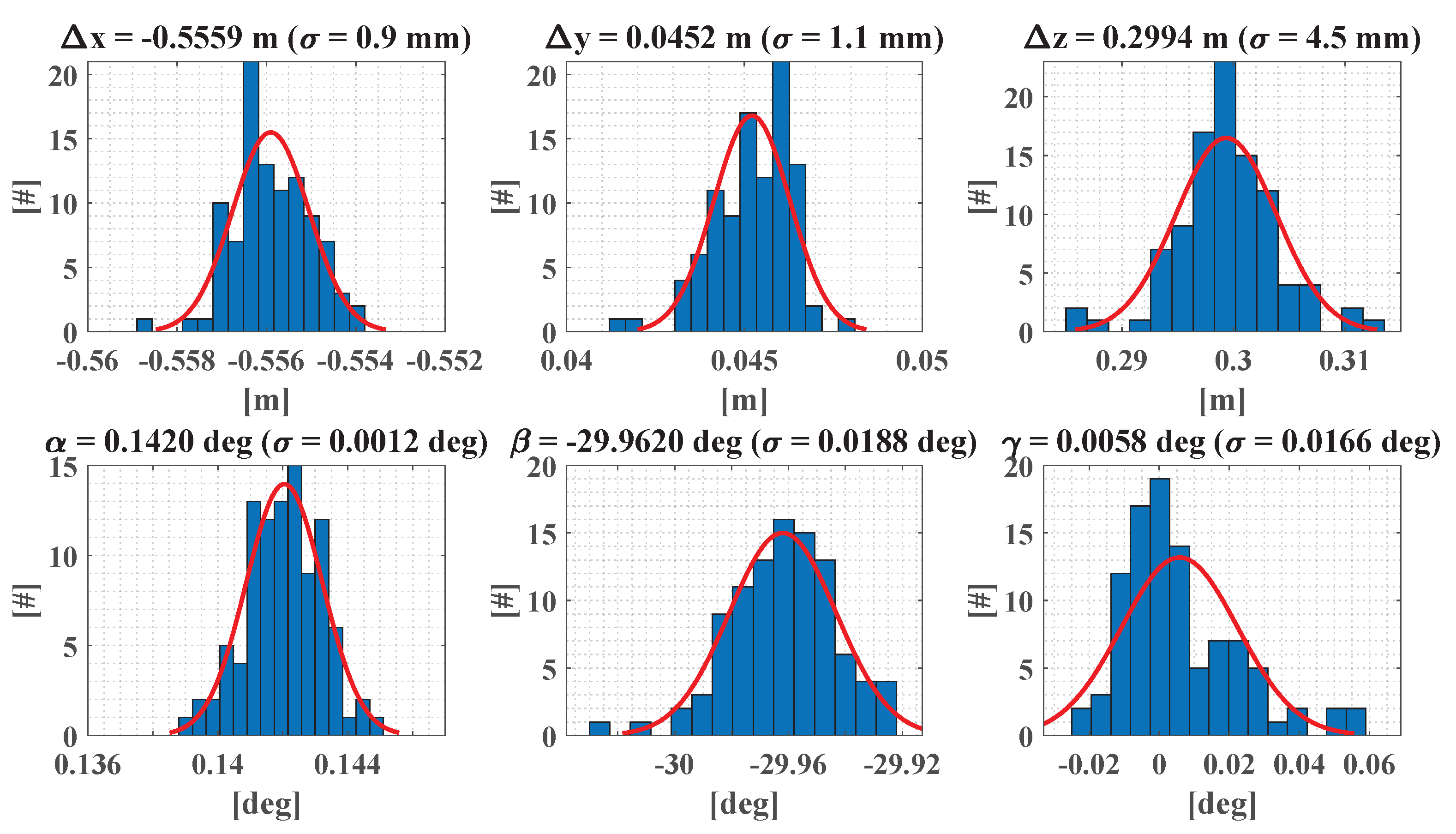
| 1 Realization | 0.9 mm | 1.1 mm | 4.5 mm | 0.0012 | 0.0188 | 0.0166 |
| 15 Realizations | 0.2 mm | 0.3 mm | 1.2 mm | 0.0003 | 0.0049 | 0.0043 |
| 98 Realizations | 0.1 mm | 0.1 mm | 0.5 mm | 0.0001 | 0.0019 | 0.0017 |
| Run | Date | GPS Time | Duration | Platform | Covered Distance | Targets |
|---|---|---|---|---|---|---|
| 1 | 13/11/18 | 09:26 a.m.–09:45 a.m. | 18:37 min | Trolley | 1250 m | 24 |
| 2 | 05/08/19 | 09:25 a.m.–09:52 a.m. | 26:24 min | Trolley | 1570 m | 31 |
| 3 | 05/08/19 | 10:50 a.m.–11:15 a.m. | 24:28 min | Trolley | 1370 m | 29 |
| 4 | 05/08/19 | 12:10 p.m.–12:35 p.m. | 24:22 min | Trolley | 1330 m | 27 |
| 5 | 05/08/19 | 01:10 p.m.–01:54 p.m. | 43:17 min | Van | 7990 m | 37 |
| Construction Plan | Plane-Based Calibration Field | |||||||
|---|---|---|---|---|---|---|---|---|
| Calibration | x = −0.5594 m | x = −0.5559 m | ||||||
| Parameters | = −30.0000 | = −29.9620 | ||||||
| Test Site | Mean | Median | STD | RMS | Mean | Median | STD | RMS |
| A | 8.7 mm | 8.7 mm | 8.5 mm | 12.2 mm | −6.3 mm | −6.3 mm | 4.1 mm | 7.6 mm |
| A * | −18.4 mm | −18.5 mm | 8.8 mm | 20.4 mm | −1.1 mm | −0.6 mm | 4.4 mm | 4.5 mm |
| A | −16.3 mm | −16.2 mm | 10.0 mm | 19.1 mm | −3.2 mm | −3.5 mm | 5.2 mm | 6.1 mm |
| A | −17.5 mm | −17.4 mm | 10.1 mm | 20.2 mm | −4.4 mm | −5.2 mm | 6.3 mm | 7.7 mm |
| A | 7.4 mm | 7.6 mm | 9.1 mm | 11.7 mm | 3.6 mm | 3.5 mm | 4.4 mm | 5.7 mm |
| B | 1.5 mm | 0.3 mm | 21.1 mm | 21.1 mm | 2.5 mm | 4.0 mm | 8.7 mm | 9.0 mm |
| B * | −9.7 mm | −1.2 mm | 27.0 mm | 28.7 mm | −0.3 mm | 0.6 mm | 7.6 mm | 7.6 mm |
| B | −7.9 mm | −2.2 mm | 26.2 mm | 27.4 mm | 0.6 mm | 0.7 mm | 6.5 mm | 6.5 mm |
| B | −6.9 mm | −2.2 mm | 24.9 mm | 25.9 mm | −0.7 mm | −0.8 mm | 8.3 mm | 8.3 mm |
| B | −14.6 mm | −8.0 mm | 30.0 mm | 33.4 mm | −4.3 mm | −3.7 mm | 8.9 mm | 9.9 mm |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Heinz, E.; Holst, C.; Kuhlmann, H.; Klingbeil, L. Design and Evaluation of a Permanently Installed Plane-Based Calibration Field for Mobile Laser Scanning Systems. Remote Sens. 2020, 12, 555. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12030555
Heinz E, Holst C, Kuhlmann H, Klingbeil L. Design and Evaluation of a Permanently Installed Plane-Based Calibration Field for Mobile Laser Scanning Systems. Remote Sensing. 2020; 12(3):555. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12030555
Chicago/Turabian StyleHeinz, Erik, Christoph Holst, Heiner Kuhlmann, and Lasse Klingbeil. 2020. "Design and Evaluation of a Permanently Installed Plane-Based Calibration Field for Mobile Laser Scanning Systems" Remote Sensing 12, no. 3: 555. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12030555