1. Introduction
The leaf area index (LAI) was introduced by the British ecologist D. J. Watson in the 1940s and is defined as the total one-sided area of green leaves per unit land area [
1,
2,
3,
4,
5]. This means that the LAI is a dimensionless quantity, characterized by a unit of (meter squared per meter squared), and it ranges from 0 (for a bare ground) to 5 (for dense orchards), but it might increase occasionally to over 10 (for highly dense forests such as the equatorial ones). The leaf area index of fruit trees plays a key role in controlling the amount of pesticide applied per unit volume of these trees. In fact, LAI-based pesticide management is important for improving spraying efficiency, achieving rational pesticide delivery, and reducing pest control costs [
6,
7,
8,
9].
The traditional LAI estimation methods, such as the square grid and leaf collection methods, mainly rely on manual field measurements, a practice which is not only wasteful of manpower but can also be extremely destructive to crops. With continuous developments in remote-sensing technologies, LAI estimation methods have been proposed based on remote sensing [
2,
3,
10,
11,
12,
13]. At present, satellites and unmanned aerial vehicles (UAVs) are two of the most popular systems for acquiring remote-sensing data. However, satellite remote-sensing data suffer from long re-entry times and poor real-time performance, and hence, timely and fast acquisition of data within specific ranges cannot be achieved. Additionally, while satellite remote sensing is suitable for large-scale areas, its resolution is somewhat limited in small-scale regional studies [
12,
13,
14,
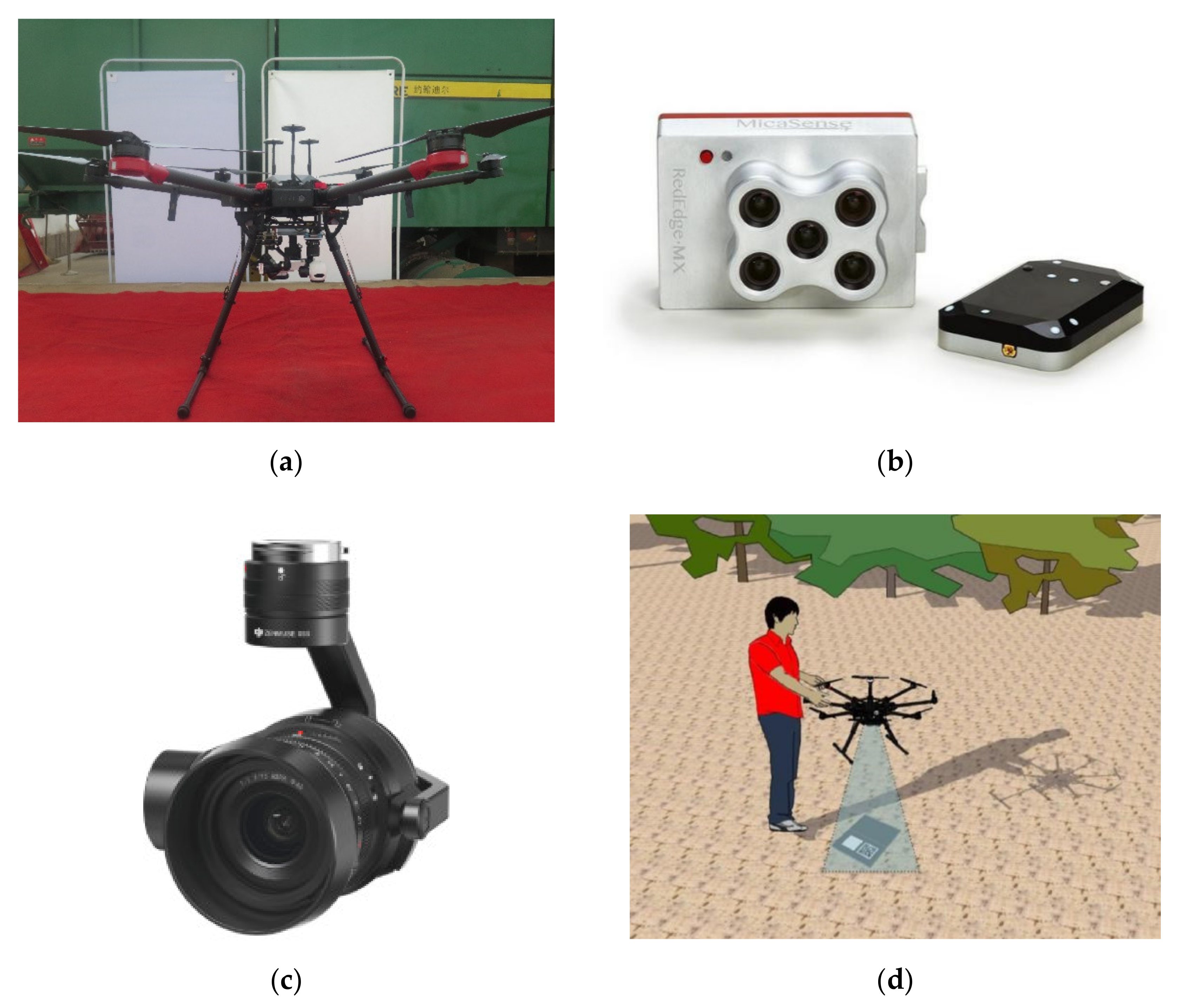
15]. With the development and popularization of agricultural information systems, UAV-based remote-sensing technology has been widely employed in agriculture. Platforms of this technology can carry different vision sensors of the visible, multispectral, hyperspectral, thermal, or infrared types. In comparison to satellite remote-sensing systems, these UAV platforms have relatively better advantages in terms of operational flexibility, time and effort savings, improved ground image resolution, fast and accurate LAI estimation, and finally, effective agricultural monitoring [
16,
17,
18,
19]. While earlier remote-sensing methods for LAI estimation have focused mainly on crops such as wheat and maize [
17,
20,
21], relatively few studies have been conducted on LAI estimation for apple trees. This observation attests to the novelty and importance of our present work, which is devoted to the study of apple trees.
China is the world’s largest producer of apples [
22]. In fact, China’s apple production is about 35 percent of the total world production, almost five times the apple production of the second-largest apple producer worldwide. At present, pest control in apple orchards is mainly based on chemical pesticides, whose traditional spraying methods often result in uneven distributions, large residues, and serious environmental impacts of these pesticides. To overcome these limitations, a precision spraying technology has been recently developed [
6]. Furthermore, the leaf area index (LAI) is a significant parameter for assessing the growth conditions of apple trees, and it is also an important basis for accurate pesticide application to these trees [
7,
8,
9]. Traditional remote-sensing methods for LAI estimation were based on a single vegetation index or a single waveband, which had different degrees of saturation that degraded the estimation performance [
23,
24,
25,
26,
27]. More recent LAI estimation methods based on using multiple bands or multiple vegetation indices demonstrated superior performance compared to methods based on a single vegetation index or a single waveband [
28,
29]. Further, machine-learning approaches have been proposed in order to fuse multiple vegetation indices and other relevant data that are strongly correlated with LAI. In fact, the machine-learning models typically outperform single-factor models, can nonlinearly fit many related factors, show higher accuracy, minimize the overall prediction error, and demonstrate good generalization performance [
30,
31]. Hongming et al. [
32] used the gradient-boosting decision tree (GBDT) algorithm to build a model for predicting the maize leaf area index from vegetation index maps. The constructed model achieved a relatively high estimation accuracy with a coefficient of determination (
R2) of 0.7558 and a root-mean-square error (RMSE) of 0.0015. Xiong et al. [
33] introduced a method for LAI estimation in forest lands using a random forest (RF) model, which resulted in a RMSE and a mean absolute error (MAE) of 0.509 and 0.414, respectively. The RF model accuracy was better than those obtained by a support vector regression (SVR) model and a back propagation (BP) model for the same period [
33]. Srinet et al. [
34] used an RF algorithm for tree canopy LAI prediction using several predictors, namely, the short-wave infrared bands (SWIR-1 and SWIR-2), the tasseled cap wetness, the moisture stress index (MSI), the normalized difference moisture index (NDMI), and the normalized difference vegetation index (NDVI). The RF model had RMSE and
R2 values of 0.14 and 0.79, respectively, and the results showed that this model can be effectively applied to predict the LAI spatial distribution [
34]. Qi et al. [
35] used BP neural networks to build peanut LAI estimation models based on single and multiple vegetation indices, respectively. Among the compared vegetation indices, the following indices had higher pairwise correlation and higher correlation with the peanut LAI: the modified red-edge simple ratio (MSR) index, the ratio vegetation index (RVI), and the normalized difference vegetation index (NDVI). As well, peanut LAI estimation based on multiple vegetation indices was found to be better than that based on a single vegetation index [
35]. The above research results show that the ensemble learning algorithm based on decision trees has strong noise immunity, generalized performance, and high accuracy in crop and wood LAI estimation.
The abovementioned studies show that machine-learning models have been successfully employed in numerous applications of crop parameter estimation from remote-sensing data. However, such models generally have the same key limitations of regression models, namely, model overfitting with limited training data and the difficulty of identifying the most influential factors among the model inputs. The gradient-boosting decision tree (GBDT) algorithm can largely solve these problems. This algorithm builds weak classifiers by allowing each tree to learn the residuals and results of all preceding trees in order to iteratively correct the original model errors and effectively improve the prediction accuracy. The GBDT algorithm can be used as an effective method for the estimation of the LAI of apple orchards. Although the aforementioned studies have created learning-based LAI estimation models with reasonable results, few of these studies addressed the problem of LAI estimation for apple trees.
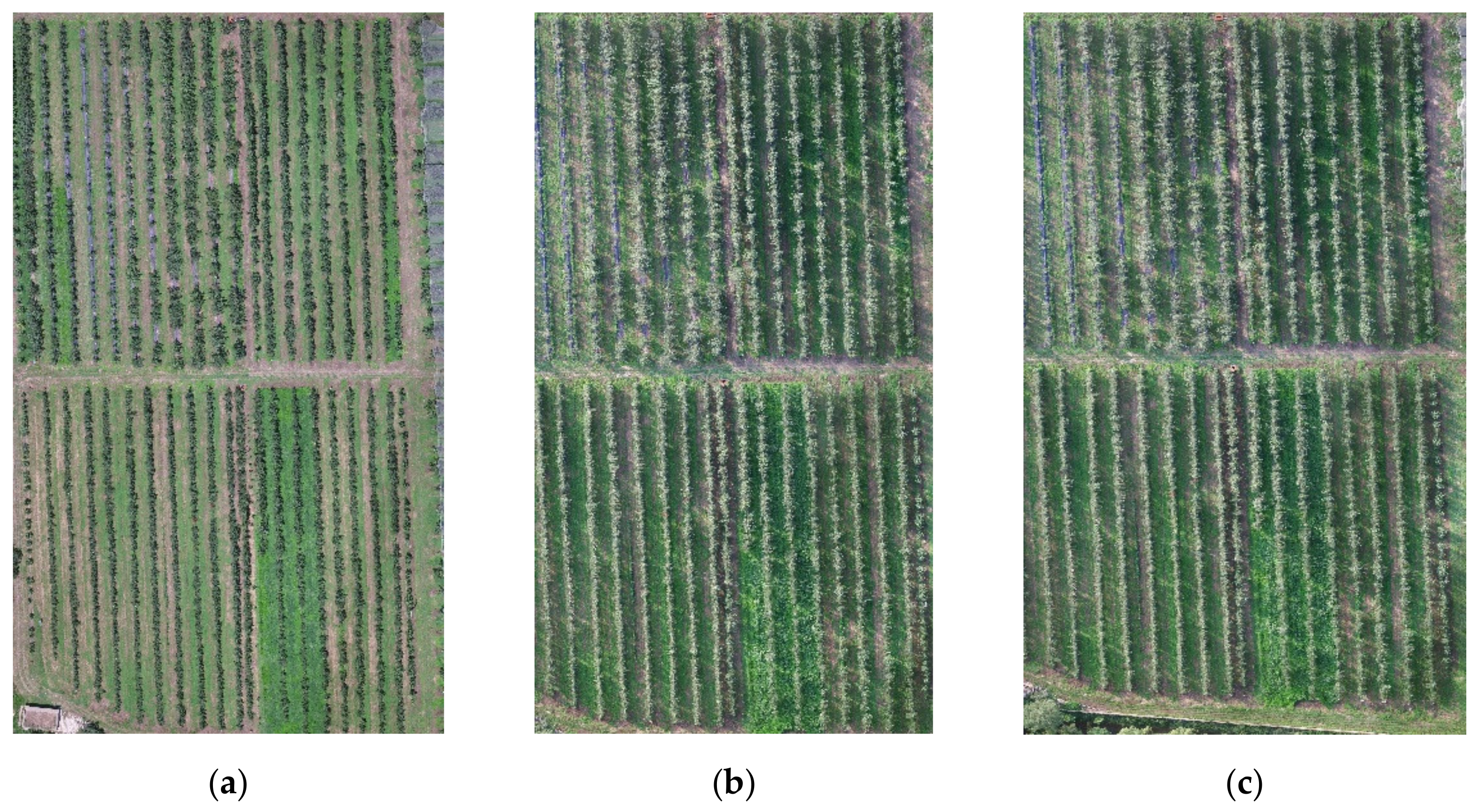
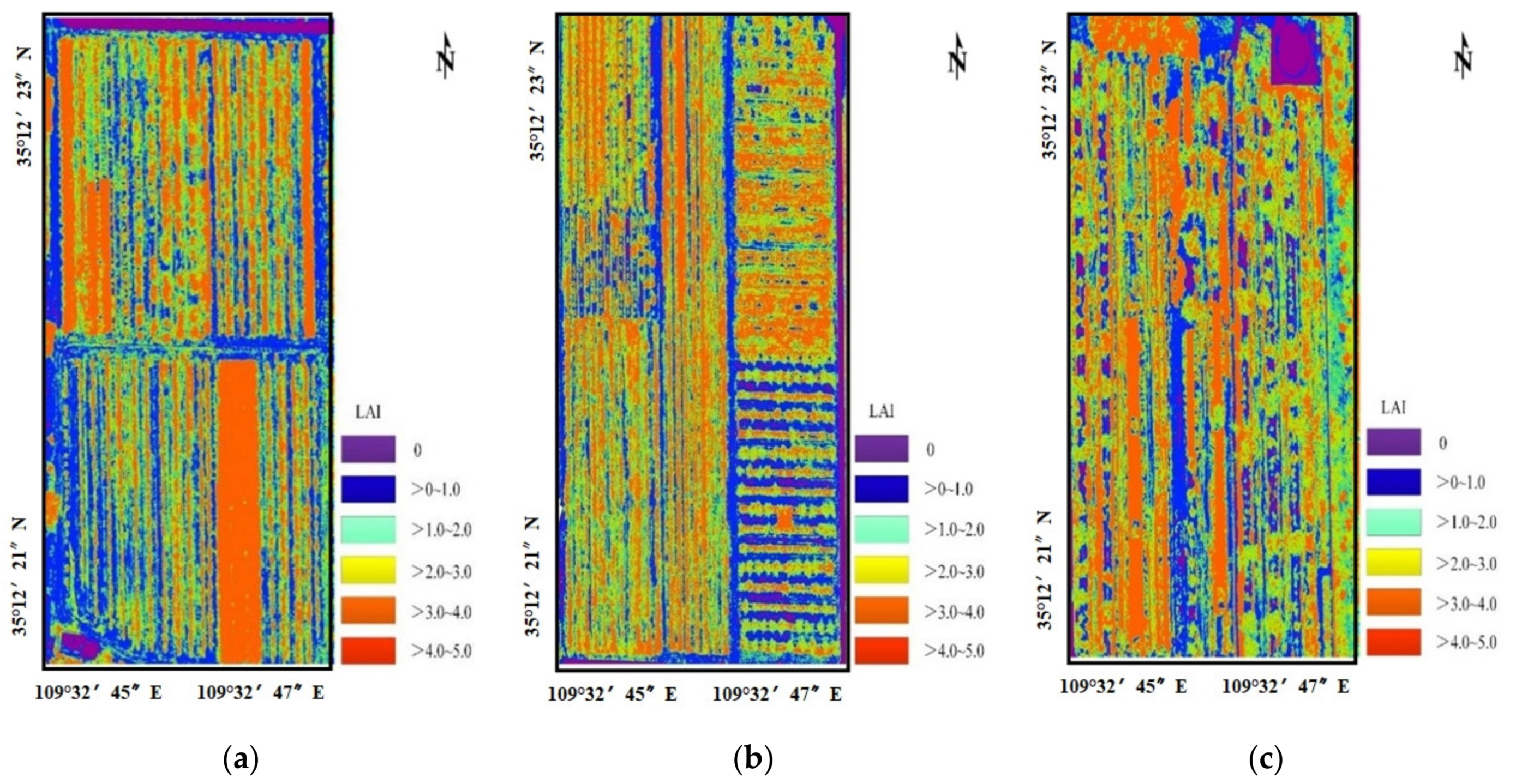
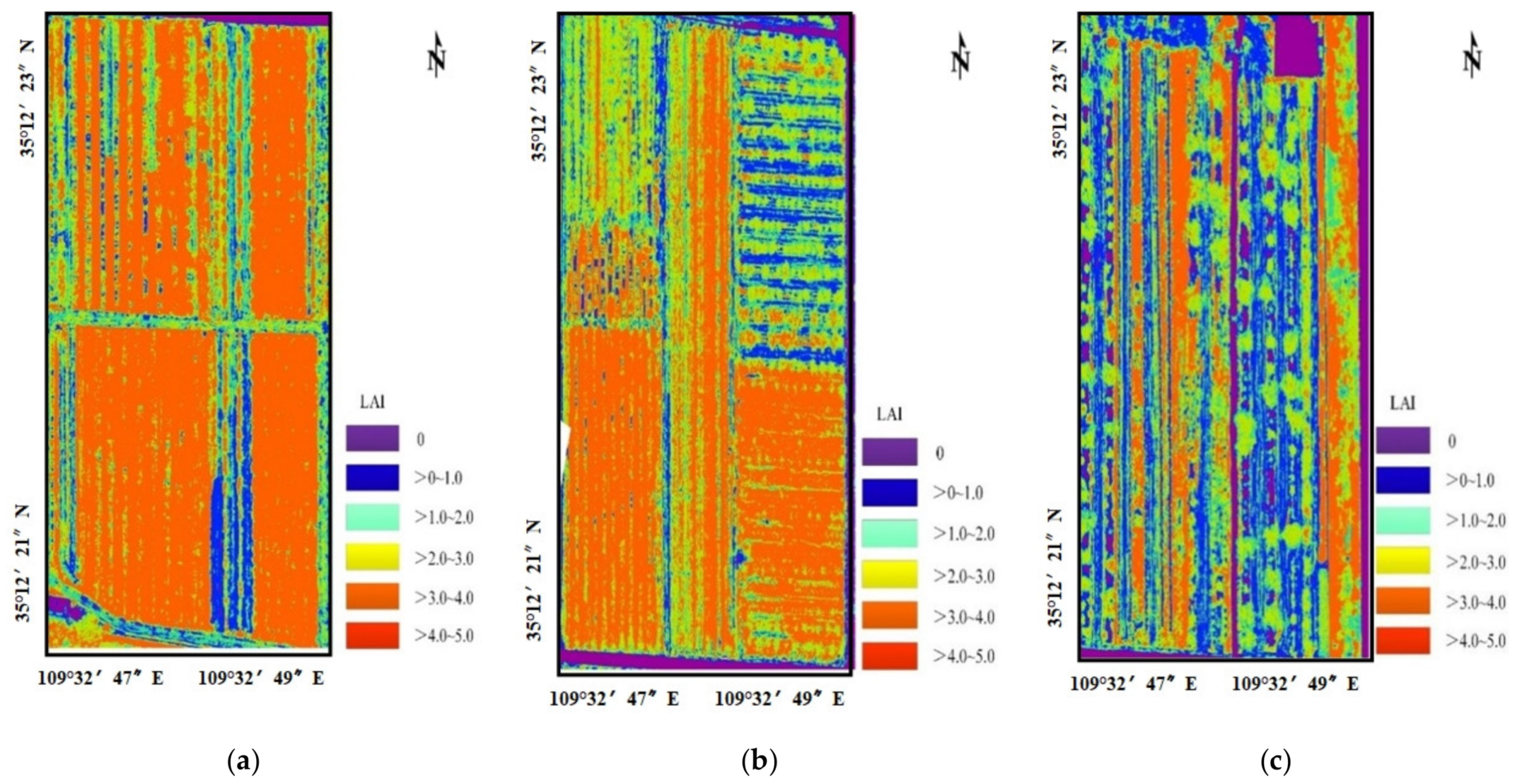
In the present study, five typical vegetation indices were employed for three growth periods of apple trees, namely, the fruit expansion period, the leaf differentiation period, and the new shoot-stopping period. The aim was to establish machine-learning models and select vegetation indices suitable for the remote-sensing estimation of the leaf area indices of apple trees, provide information to support decision making for large-scale apple orchards crops, and also provide a basis for high-precision apple orchard management.
4. Discussion
The UAV-based remote sensing is an important tool for quickly obtaining information on vegetation in large-scale areas of apple orchards. As well, the apple tree LAI is highly correlated with general vegetation indices of fruit trees. Most of the previous studies used a single vegetation index for remote-sensing estimation, and the number of investigated vegetation indices was relatively small. A single vegetation index contains information on only a single band and may have different degrees of saturation. Thus, poor generalization performance is typical in remote-sensing models for LAI estimation where a single vegetation index is used. In this study, the LAI of apple trees was estimated using multiple growth periods and multiple vegetation indices. This approach allowed relatively comprehensive LAI estimation for apple trees in different growth periods.
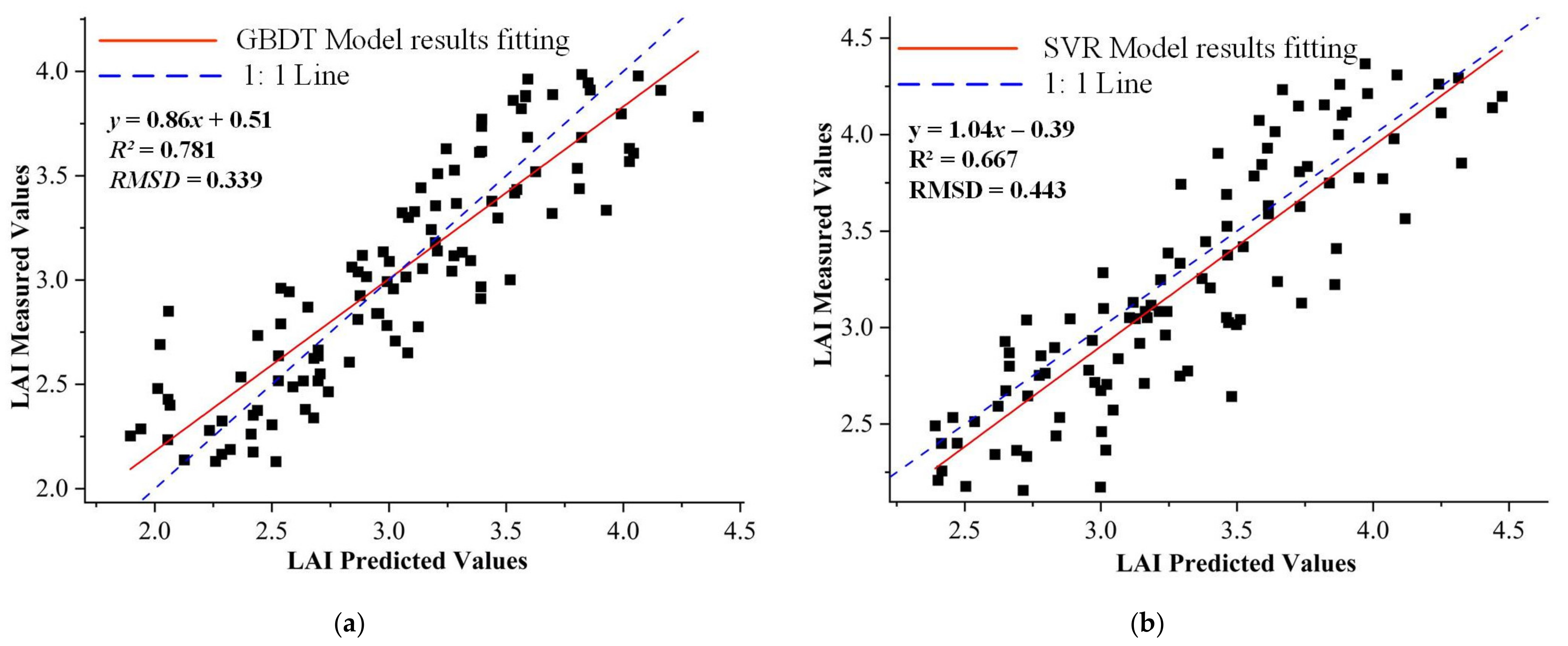
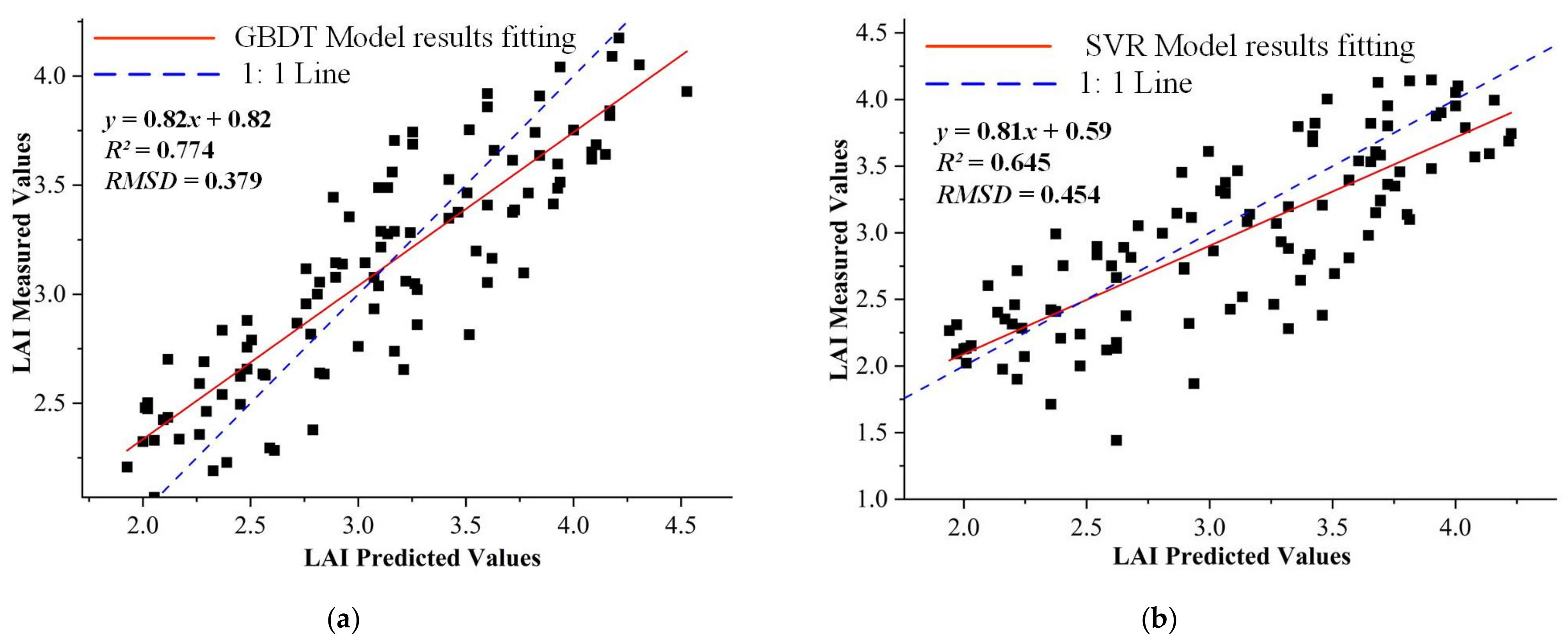
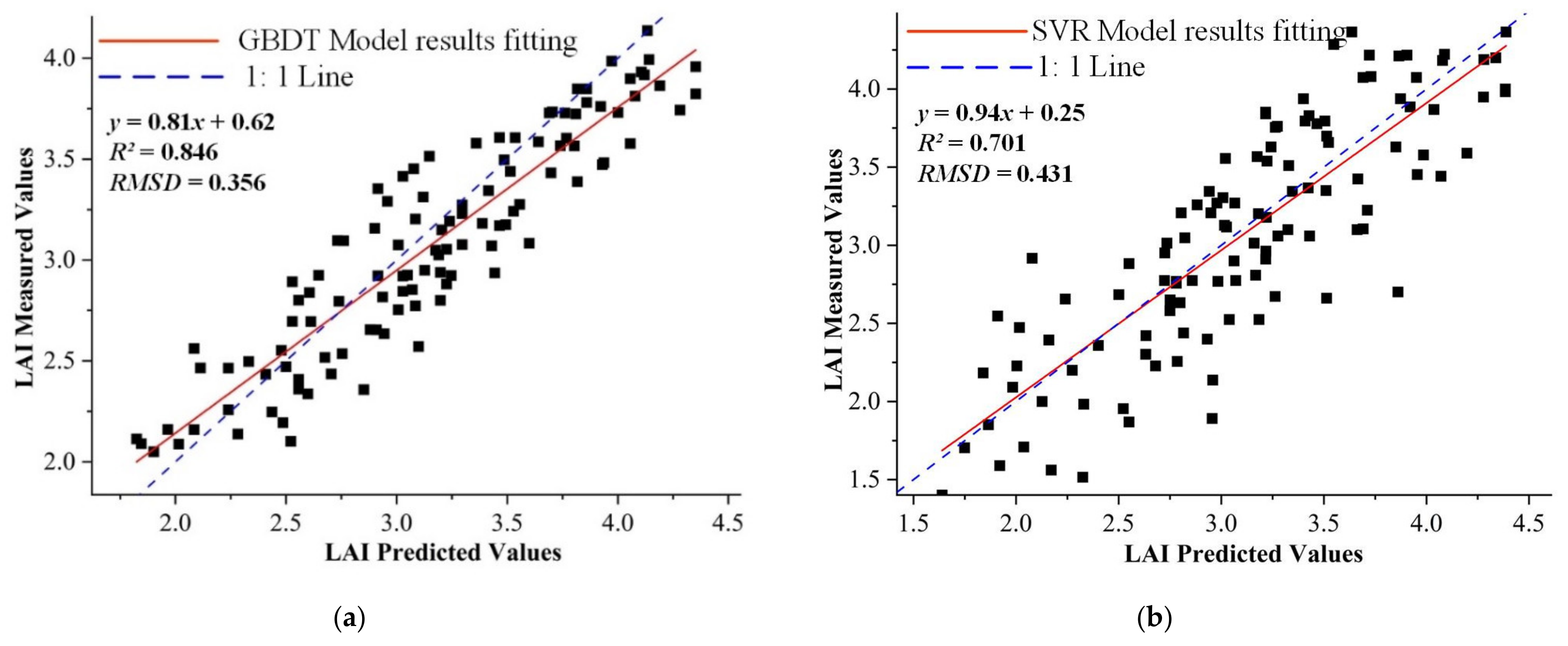
In addition to the selection of the independent variables (i.e., the vegetation indices), appropriate model selection is an important factor affecting the remote-sensing LAI monitoring in apple trees. Moreover, the selection of a suitable model can help improve the accuracy of remote-sensing prediction of the vegetation’s physical and chemical parameters. In this study, the gradient-boosting decision tree (GBDT) algorithm was introduced, for the first time, into the study of the apple-tree LAI estimation models. In addition, the LAI estimation was carried out for the three most important growth periods of the apple trees, namely, the fruit expansion period, the leaf differentiation period, and the shoot-stopping period. The obtained GBDT model was found to be significantly better than the SVR model, which is in line with previous studies [
32]. The key advantage of the GBDT algorithm is its ability to combine several weak learners into a strong learner, whose outcome is the sum of multiple regression trees. The model constructed by this algorithm can flexibly process various types of continuous data (e.g., LAI) or discrete data (e.g., crop canopy temperature). For regression analysis with small samples, the GBDT algorithm can set different loss functions with a relatively small tuning time and, hence, can improve the estimation accuracy. The GBDT algorithm avoids the time complexity incurred by the SVR model for selecting suitable kernel functions and other parameters. Additionally, while the SVR algorithm assigns equal weights to all input factors and cannot judge the contribution of each factor, the GBDT algorithm solves these problems. Therefore, the GBDT algorithm is highly applicable in regression problems. However, two GBDT aspects need to be noted:
- (1)
The GBDT algorithm is used to judge the influence of several similar vegetation indices in the red and near-infrared bands, a fact that highlights the advantages of the algorithm. Still, there is room for accuracy improvement via further studies.
- (2)
There are dependencies between the base learners in the GBDT algorithm, and hence, parallel calculations can be generally difficult to perform. This paper has not considered the parallelism among the base learners. In future research, we should focus on how to realize parallel operations (at least partially) to further improve the estimation efficiency.
In the study, nine vegetation indices with a high correlation with the leaf area index (LAI) of apple trees were used, all of which were in the visible and near-infrared bands of the spectra, which are consistent with previous studies.
Previously, the acquisition of leaf area index in orchards was mainly based on ground measurements, and the main manual ground measurement methods are the instrumental measurement method (LAI-2200C) and hemispheric photography method. However, they can only respond to a small area of the leaf area index situation, and the measurement efficiency is low. This study is the first to apply UAV remote sensing to the measurement of a leaf area index of apple trees. Compared with manual ground measurement of apple tree LAI, it has the advantages of being high efficiency, time saving, and having wide application. Therefore, it is suitable for the acquisition of LAI in large apple orchards [
58].


 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}