
Efficient SAR Azimuth Ambiguity Reduction in Coastal Waters Using a Simple Rotation Matrix: The Case Study of the Northern Coast of Jeju Island


Abstract
:1. Introduction
2. Background Theory and Data
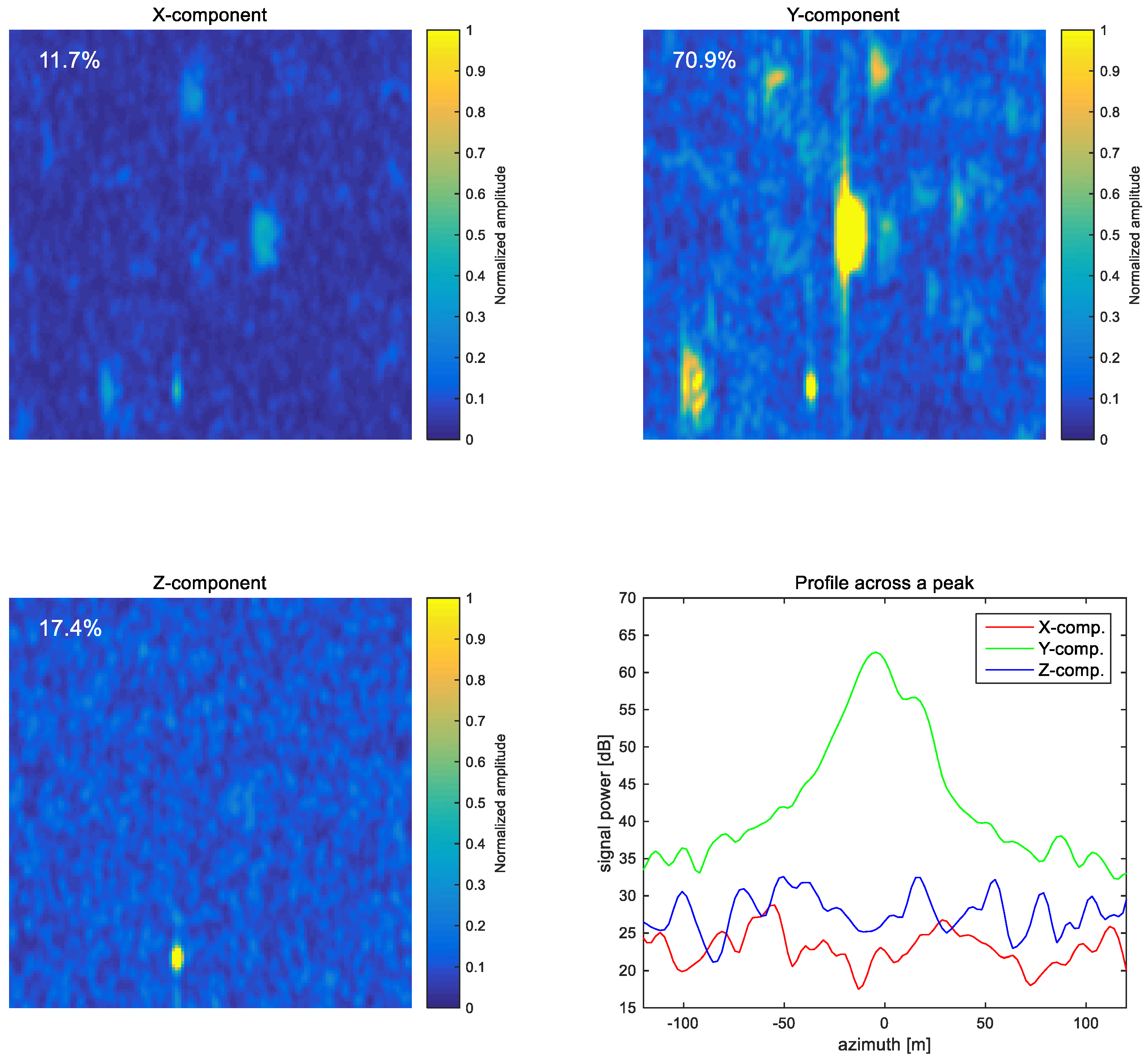
2.1. Characteristics of Azimuth Ambiguity and Multi-Look Processing
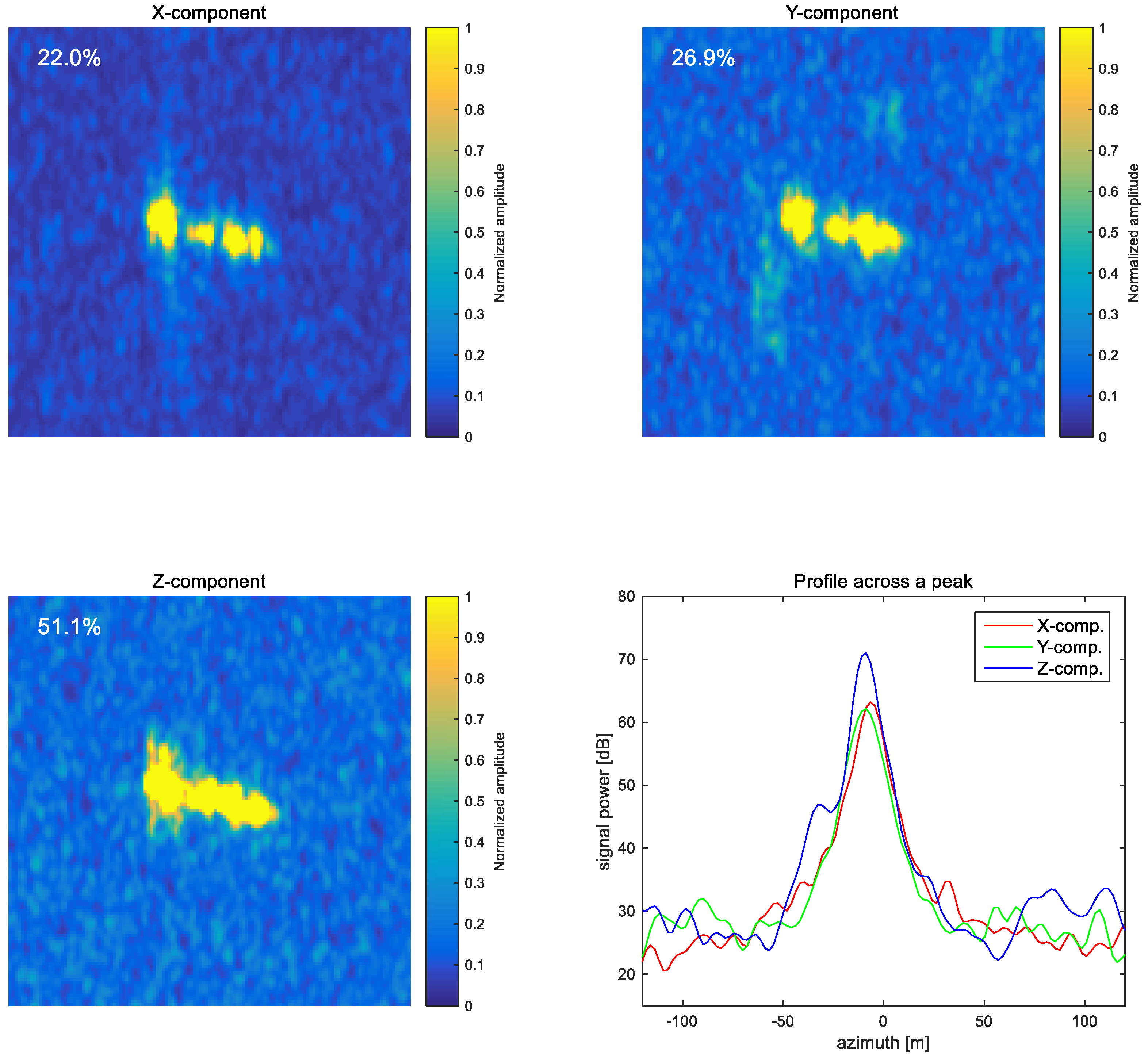
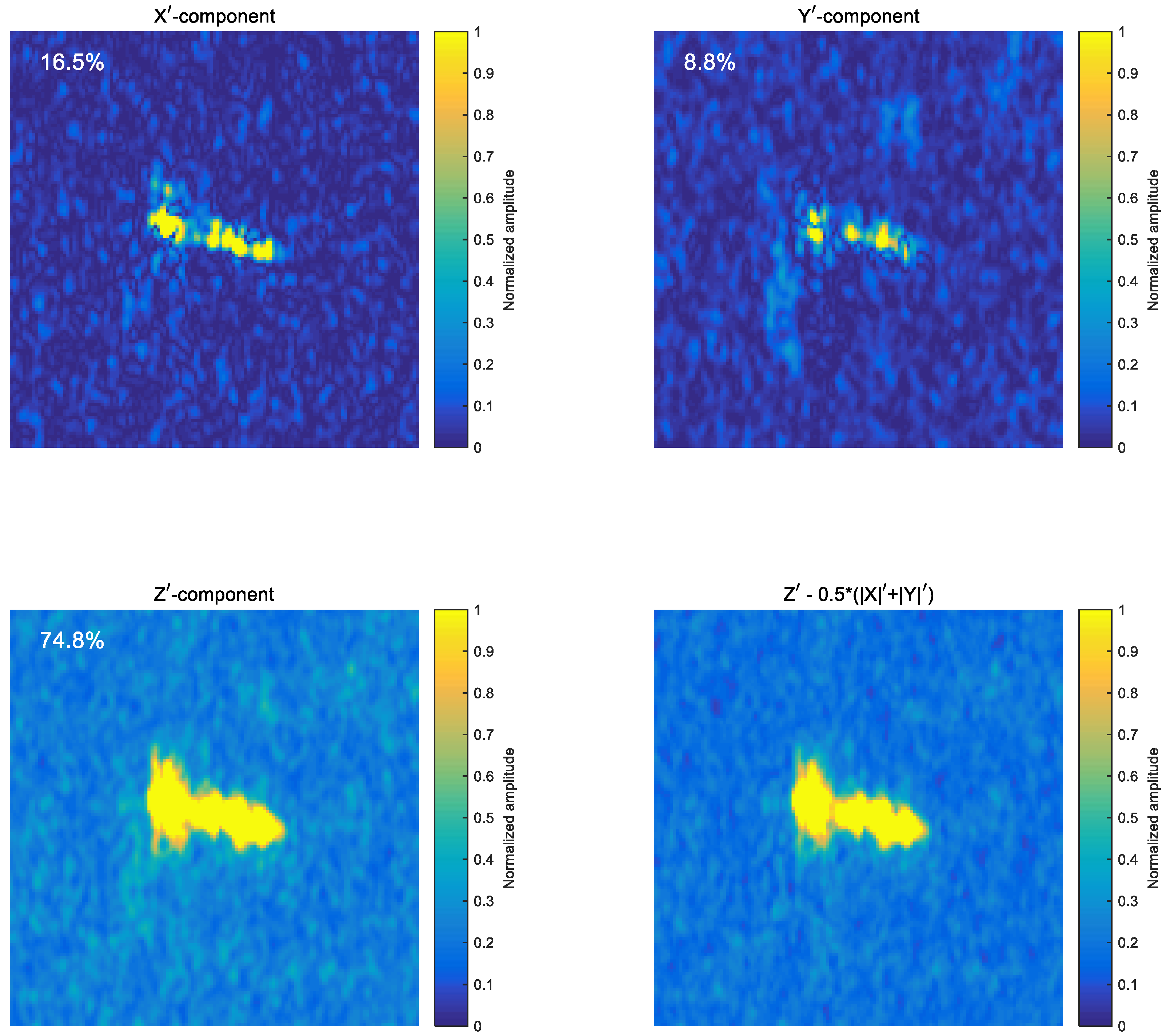
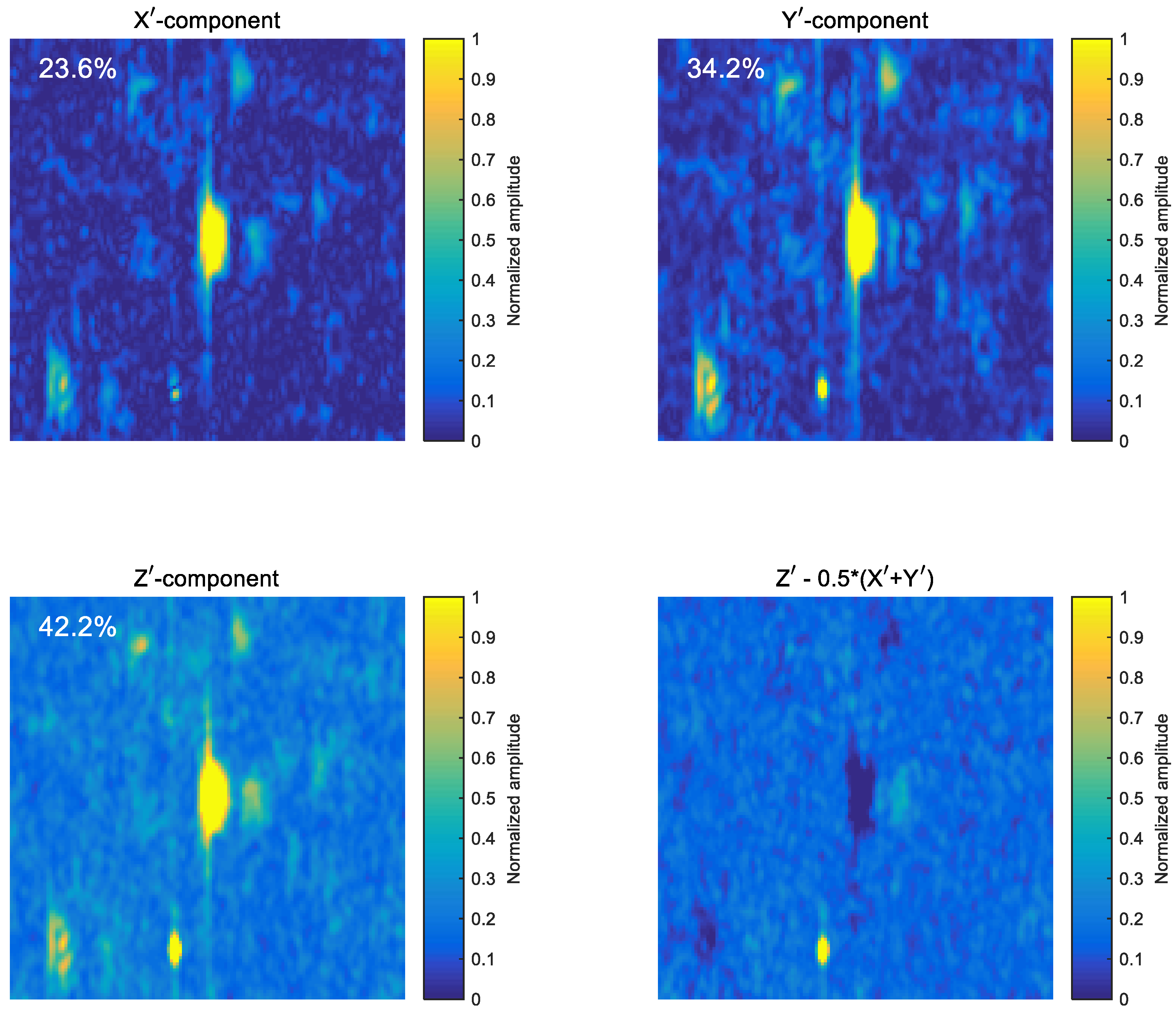
2.2. Core Idea and Method
3. Application Results and Discussion
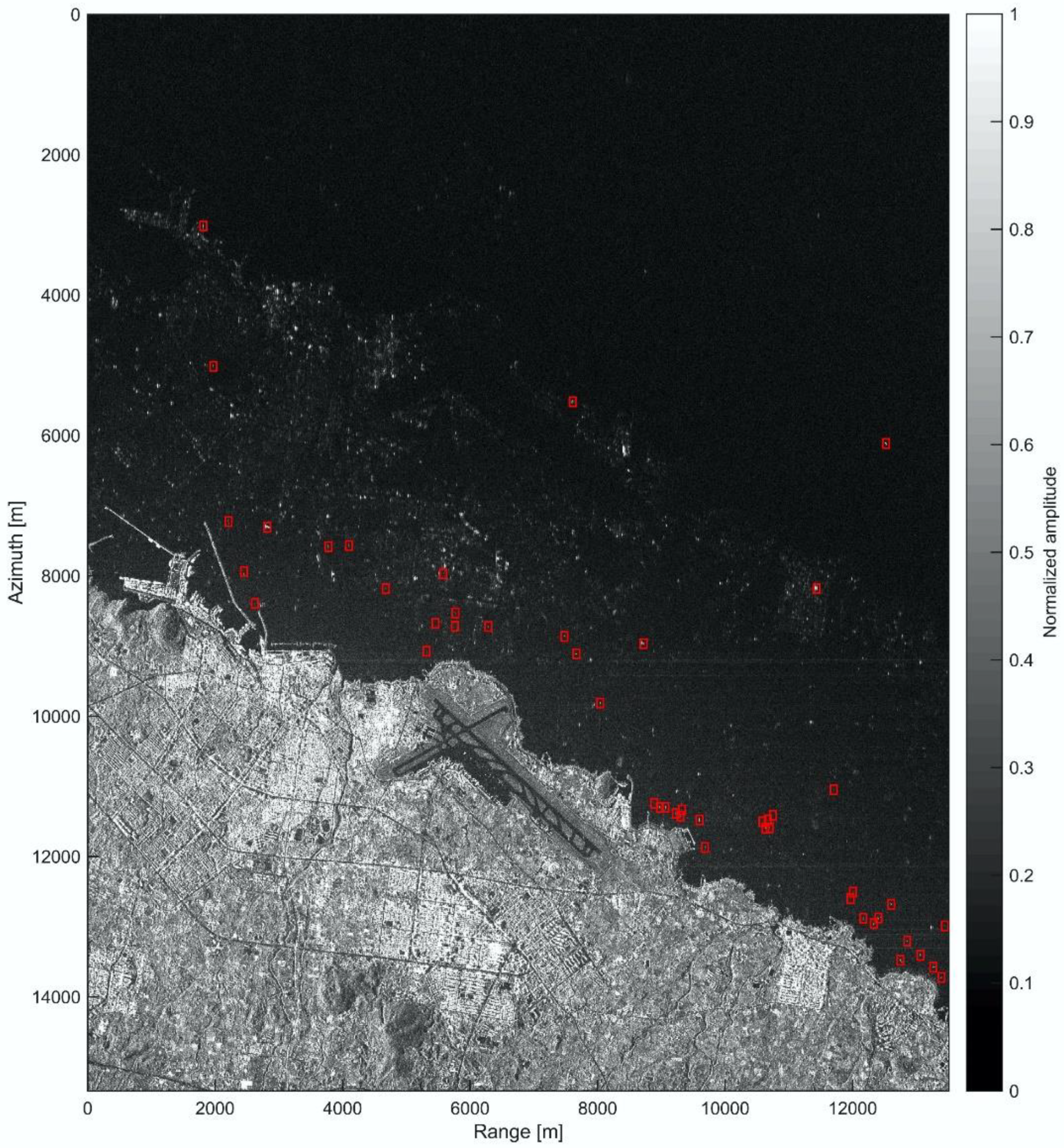
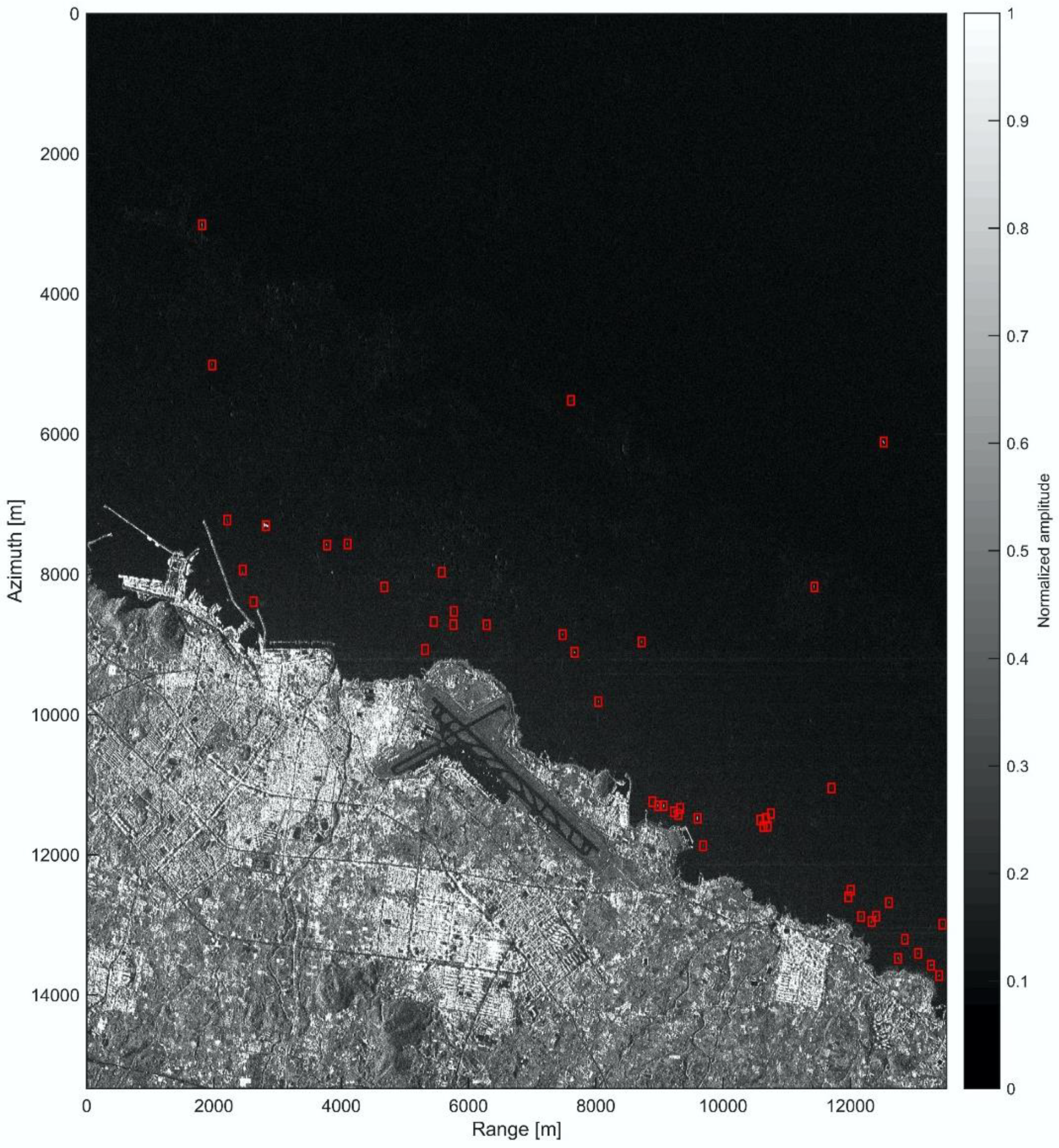
3.1. SAR Data in Coastal Regions
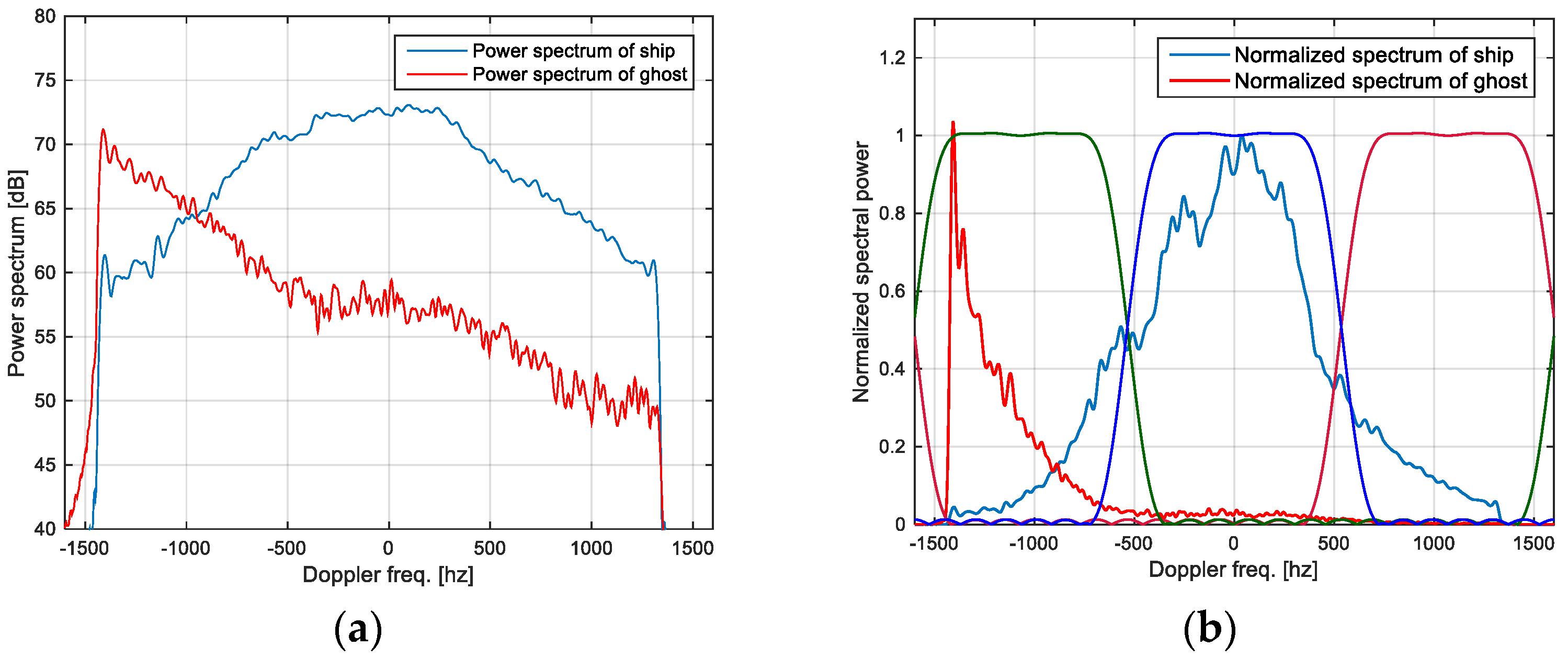
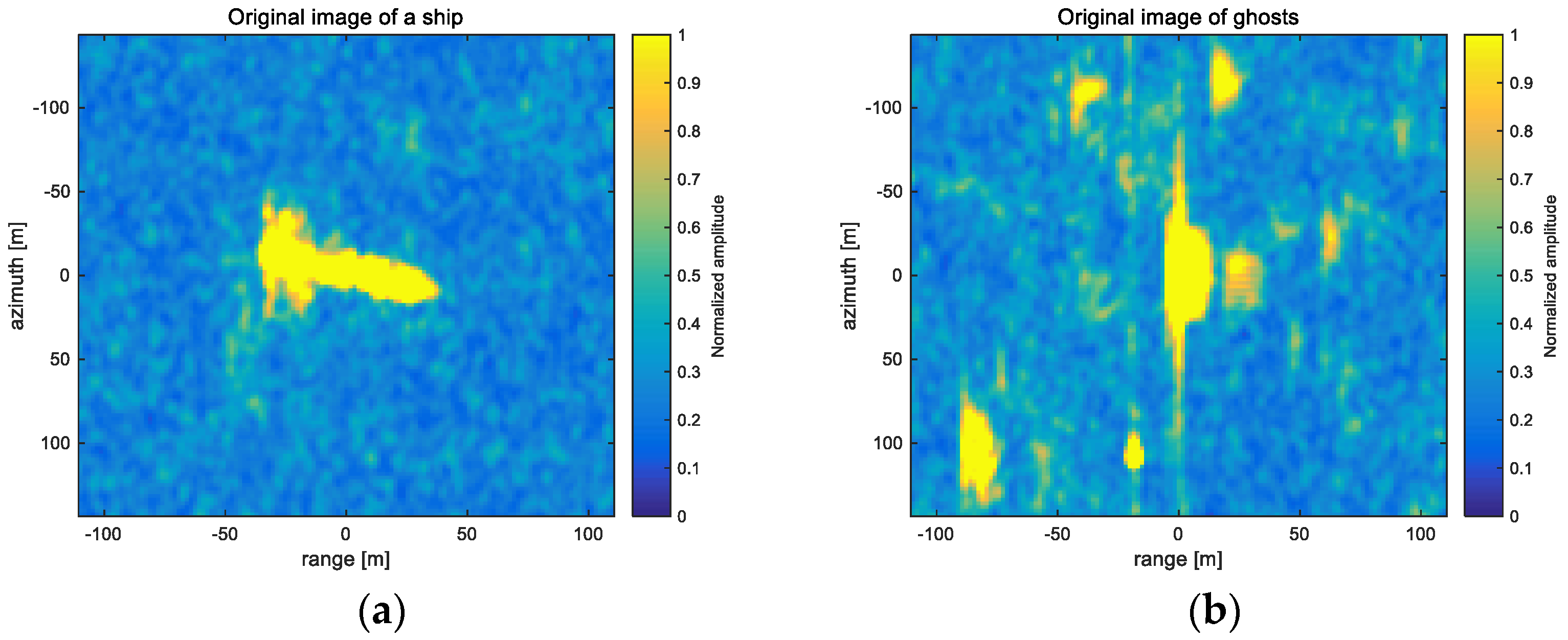
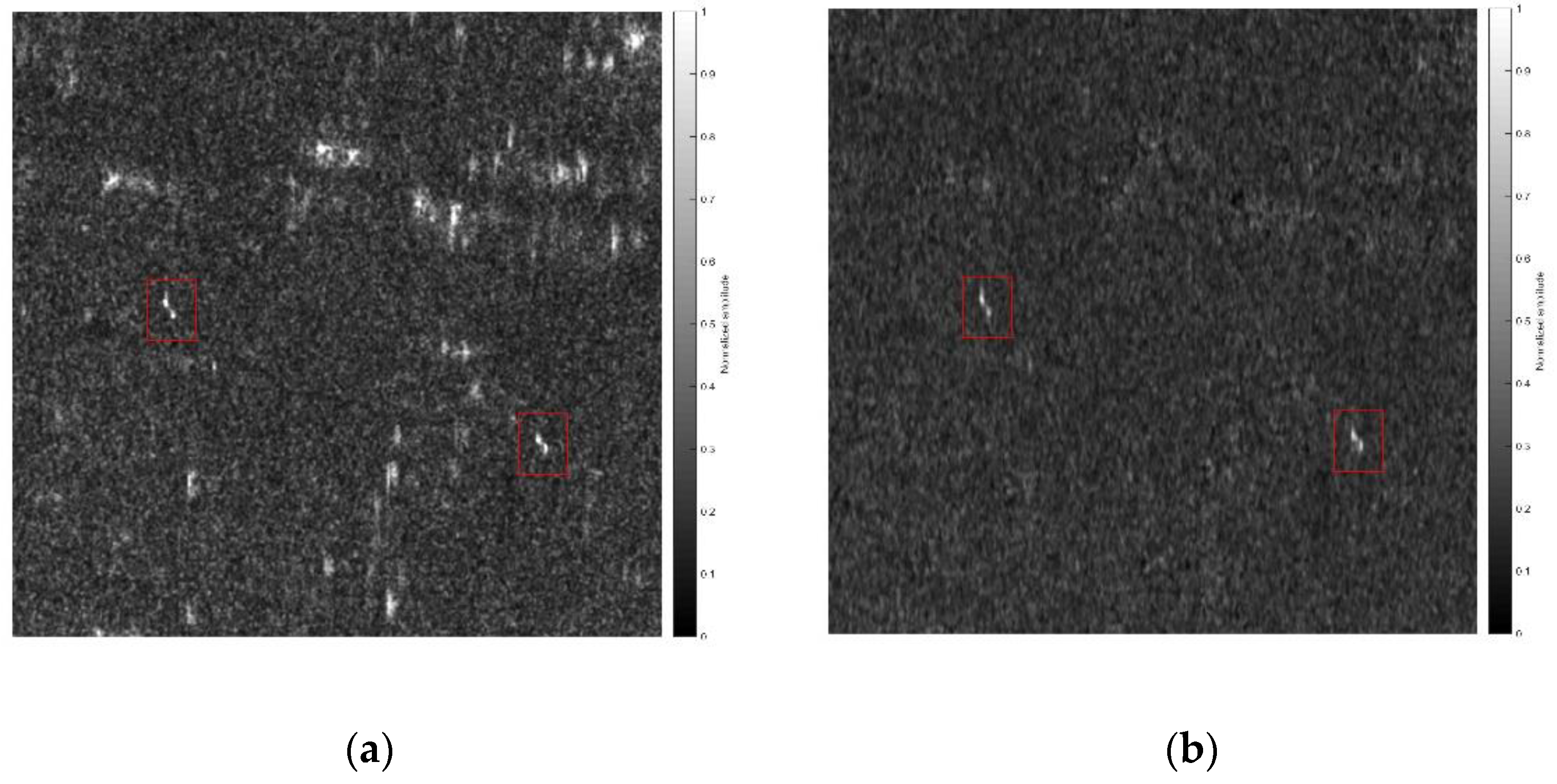
3.2. Comparison between Vessels and Ghosts
3.3. Results of the Application for the Whole Area
3.4. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Brusch, S.; Lehner, S.; Fritz, T.; Soccorsi, M.; Soloviev, A.; van Schie, B. Ship Surveillance With TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1092–1103. [Google Scholar] [CrossRef]
- Iervolino, P.; Guida, R.; Whittaker, P. A novel ship-detection technique for Sentinel-1 SAR data. In Proceedings of the 2015 IEEE 5th Asia-Pacific Conference on Synthetic Aperture Radar, APSAR 2015, Singapore, 1–4 September 2015; pp. 797–801. [Google Scholar]
- Lee, J.S.; Jurkevich, I. Coastline Detection and Tracing in SAR Images. IEEE Trans. Geosci. Remote Sens. 1990, 28, 662–668. [Google Scholar] [CrossRef] [Green Version]
- Back, M.; Kim, D.; Kim, S.W.; Won, J.S. Two-Dimensional Ship Velocity Estimation Based on KOMPSAT-5 Synthetic Aperture Radar Data. Remote Sens. 2019, 11, 1474. [Google Scholar] [CrossRef] [Green Version]
- Yi, N.; He, Y.J.; Liu, B.C. Improved Method to Suppress Azimuth Ambiguity for Current Velocity Measurement in Coastal Waters Based on ATI-SAR Systems. Remote Sens. 2020, 12, 3288. [Google Scholar] [CrossRef]
- Santamaria, C.; Greidanus, H. Ambiguity discrimination for ship detection using Sentinel-1 repeat acquisition operations. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 2477–2480. [Google Scholar]
- Li, F.K.; Johnson, W.T.K. Ambiguities in Spaceborne Synthetic Aperture Radar Systems. IEEE Trans. Aerosp. Electron. Syst. 1983, 19, 389–397. [Google Scholar] [CrossRef]
- Raney, R.K. Doppler Properties of Radars in Circular Orbits. Int. J. Remote Sens. 1986, 7, 1153–1162. [Google Scholar] [CrossRef]
- Rolt, K.D.; Schmidt, H. Azimuthal Ambiguities in Synthetic Aperture Sonar and Synthetic Aperture Radar Imagery. IEEE J. Ocean. Eng. 1992, 17, 73–79. [Google Scholar] [CrossRef]
- Freeman, A.; Johnson, W.T.K.; Huneycutt, B.; Jordan, R.; Hensley, S.; Siqueira, P.; Curlander, J. The “myth” of the minimum SAR antenna area constraint. IEEE Trans. Geosci. Remote Sens. 2000, 38, 320–324. [Google Scholar] [CrossRef] [Green Version]
- Gebert, N.; Krieger, G.; Moreira, A. Digital Beamforming on Receive: Techniques and Optimization Strategies for High-Resolution Wide-Swath SAR Imaging. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 564–592. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.H.; Younis, M.; Prats-Iraola, P.; Gabele, M.; Krieger, G. First Spaceborne Demonstration of Digital Beamforming for Azimuth Ambiguity Suppression. IEEE Trans. Geosci. Remote Sens. 2013, 51, 579–590. [Google Scholar] [CrossRef] [Green Version]
- Villano, M.; Krieger, G.; Jäger, M.; Moreira, A. Staggered SAR: Performance Analysis and Experiments with Real Data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6617–6638. [Google Scholar] [CrossRef]
- Villano, M.; Krieger, G.; Moreira, A. New Insights Into Ambiguities in Quad-Pol SAR. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3287–3308. [Google Scholar] [CrossRef]
- Younis, M.; Fischer, C.; Wiesbeck, W. Digital beamforming in SAR systems. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1735–1739. [Google Scholar] [CrossRef]
- Moreira, A. Suppressing the Azimuth Ambiguities in Synthetic Aperture Radar Images. IEEE Trans. Geosci. Remote Sens. 1993, 31, 885–895. [Google Scholar] [CrossRef]
- Guarnieri, A.M. Adaptive removal of azimuth ambiguities in SAR images. IEEE Trans. Geosci. Remote Sens. 2005, 43, 625–633. [Google Scholar] [CrossRef]
- Villano, M.; Krieger, G. Spectral-Based Estimation of the Local Azimuth Ambiguity-to-Signal Ratio in SAR Images. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2304–2313. [Google Scholar] [CrossRef]
- Martino, G.D.; Iodice, A.; Riccio, D.; Ruello, G. Filtering of Azimuth Ambiguity in Stripmap Synthetic Aperture Radar Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3967–3978. [Google Scholar] [CrossRef] [Green Version]
- Long, Y.J.; Zhao, F.J.; Zheng, M.J.; Jin, G.D.; Zhang, H. An Azimuth Ambiguity Suppression Method Based on Local Azimuth Ambiguity-to-Signal Ratio Estimation. IEEE Geosci. Remote Sens. Lett. 2020, 17, 2075–2079. [Google Scholar] [CrossRef]
- Meng, H.; Chong, J.S.; Wang, Y.H.; Li, Y.; Yan, Z.F. Local Azimuth Ambiguity-to-Signal Ratio Estimation Method Based on the Doppler Power Spectrum in SAR Images. Remote Sens. 2019, 11, 857. [Google Scholar] [CrossRef] [Green Version]
- Zeng, T.; Lu, Z.; Ding, Z.; Bian, M. SAR Doppler Ambiguity Resolver Based on Entropy Minimization. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4405–4416. [Google Scholar] [CrossRef]
- Scheiber, R.; Jäger, M. Detection and mitigation of strong azimuth ambiguities in high resolution SAR images. In Proceedings of the European Conference on Synthetic Aperture Radar, EUSAR, Hamburg, Germany, 6–9 June 2016. [Google Scholar]
- Liu, B.C.; He, Y.J.; Li, Y.K.; Duan, H.Y.; Song, X. A New Azimuth Ambiguity Suppression Algorithm for Surface Current Measurement in Coastal Waters and Rivers With Along-track InSAR. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3148–3165. [Google Scholar] [CrossRef]
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Artech House: Boston, MA, USA, 2005; p. 625. [Google Scholar]
- Begueria, S. Validation and evaluation of predictive models in hazard assessment and risk management. Nat. Hazards 2006, 37, 315–329. [Google Scholar] [CrossRef] [Green Version]
- Zou, K.H.; O’Malley, A.J.; Mauri, L. Receiver-operating characteristic analysis for evaluating diagnostic tests and predictive models. Circulation 2007, 115, 654–657. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fawcett, T. An introduction to ROC analysis. Pattern Recogn. Lett. 2006, 27, 861–874. [Google Scholar] [CrossRef]
- Pappas, O.; Achim, A.; Bull, D. Superpixel-Level CFAR Detectors for Ship Detection in SAR Imagery. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1397–1401. [Google Scholar] [CrossRef] [Green Version]
- Fiedler, H.; Boerner, E.; Mittermayer, J.; Krieger, G. Total zero Doppler steering—A new method for minimizing the Doppler centroid. IEEE Geosci. Remote Sens. Lett. 2005, 2, 141–145. [Google Scholar] [CrossRef]
- Cozzolino, E.; Lasta, C.A. Use of VIIRS DNB satellite images to detect jigger ships involved in the Illex argentinus fishery. Remote Sens. Appl. Soc. Environ. 2016, 4, 167–178. [Google Scholar] [CrossRef]
- Kim, E.; Kim, S.W.; Jung, H.C.; Ryu, J.H. Moon Phase based Threshold Determination for VIIRS Boat Detection. Korean J. Remote Sens. 2021, 37, 69–84. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Range/azimuth ground resolution | 1.42/2.30 (m) | Doppler rate at scene center | 4275.7 (Hz/s) |
| Projected azimuth sample spacing | 2.19 (m) | Doppler centroid at scene center | −491 (Hz) |
| PRF | 3212.3 (Hz) | Total processed azimuth bandwidth | 2790.5 (Hz) |
| Antenna effective velocity | 7355.1 (m/s) | Incidence angle at scene center | 53.8 (deg.) |
| Beam ground velocity | 7036.6 (m/s) | PRF Time | 0.7513 (s) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, J.H.; Won, J.-S. Efficient SAR Azimuth Ambiguity Reduction in Coastal Waters Using a Simple Rotation Matrix: The Case Study of the Northern Coast of Jeju Island. Remote Sens. 2021, 13, 4865. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13234865
Choi JH, Won J-S. Efficient SAR Azimuth Ambiguity Reduction in Coastal Waters Using a Simple Rotation Matrix: The Case Study of the Northern Coast of Jeju Island. Remote Sensing. 2021; 13(23):4865. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13234865
Chicago/Turabian StyleChoi, Joon Hyuk, and Joong-Sun Won. 2021. "Efficient SAR Azimuth Ambiguity Reduction in Coastal Waters Using a Simple Rotation Matrix: The Case Study of the Northern Coast of Jeju Island" Remote Sensing 13, no. 23: 4865. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13234865