
Experimental Analysis of Atmospheric Ducts and Navigation Radar Over-the-Horizon Detection

 , , ,
, , ,
Abstract
:1. Introduction
2. Theoretical Models and Methods
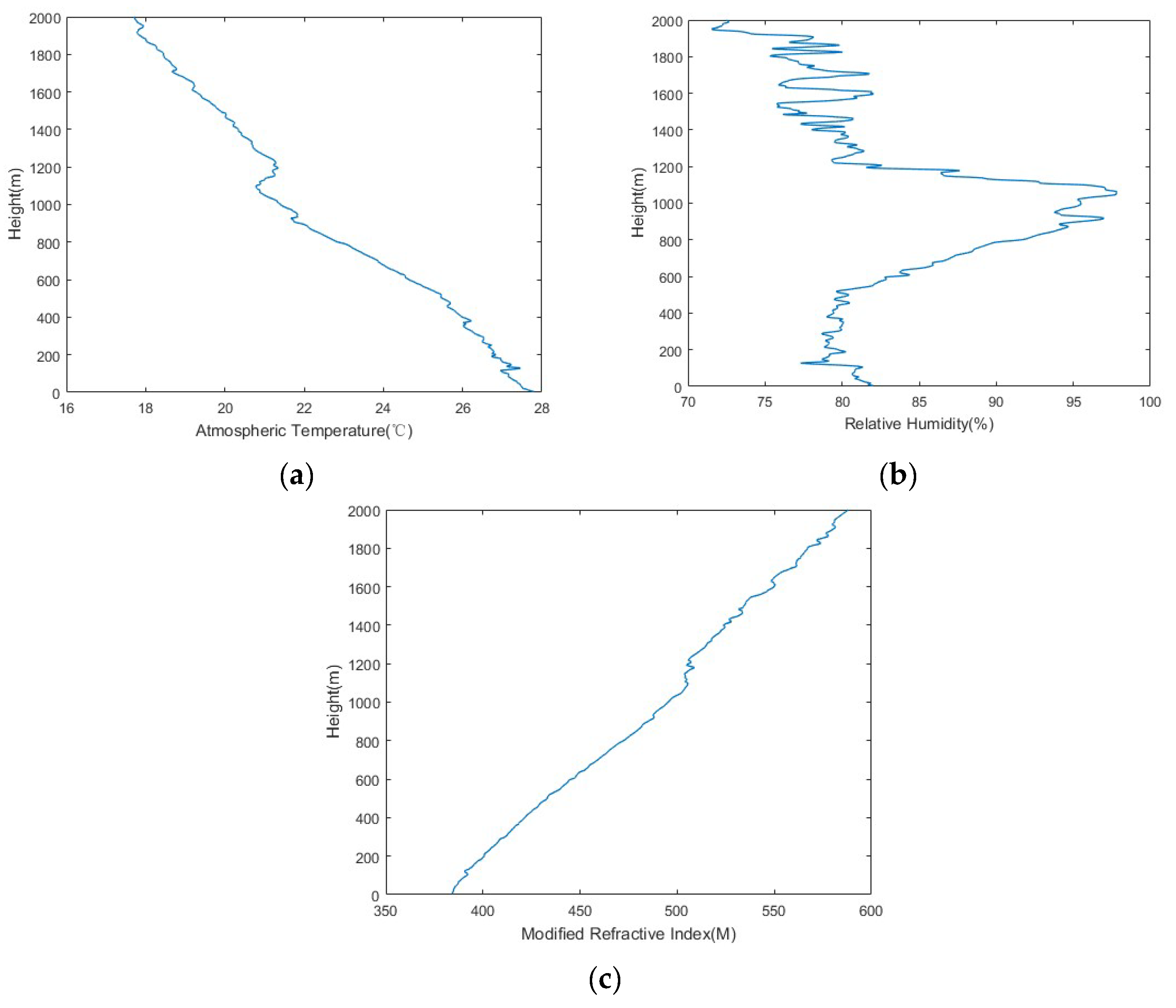
2.1. Atmospheric Duct Diagnostic Method
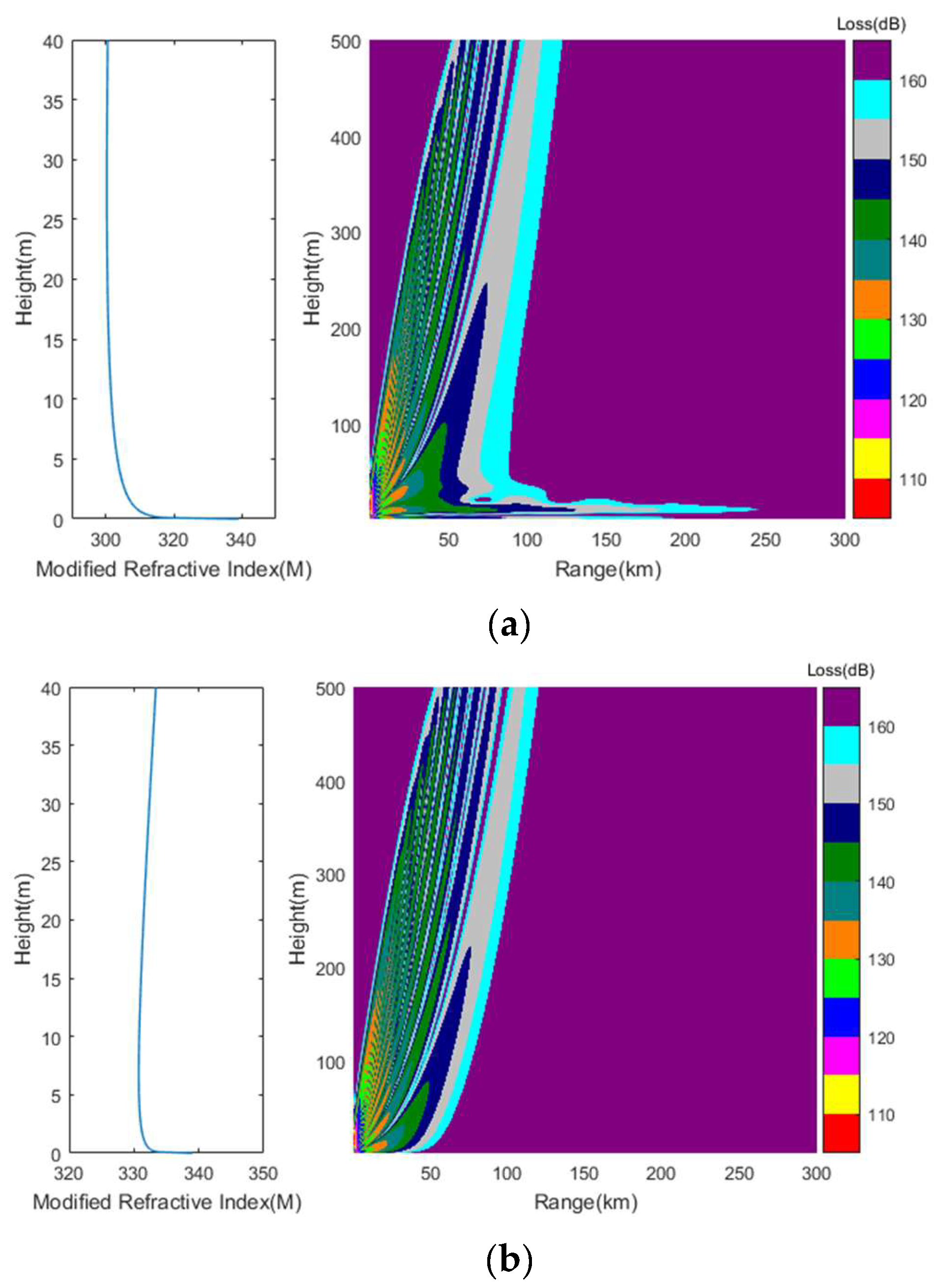
2.2. Electromagnetic Wave Propagation Loss Model
2.3. Navigation Radar Over-the-Horizon
3. Experimental Design
4. Analysis of Experimental Results
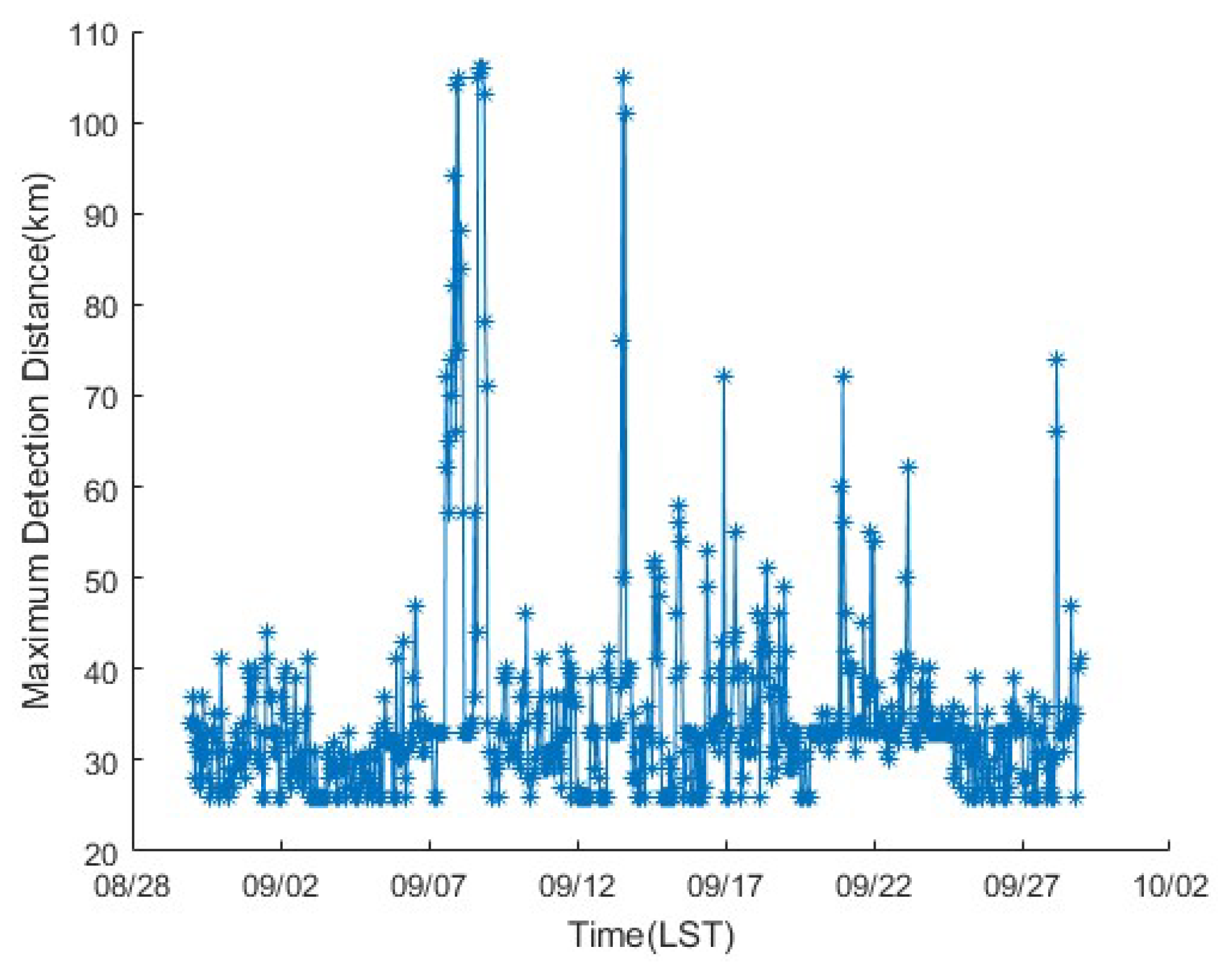
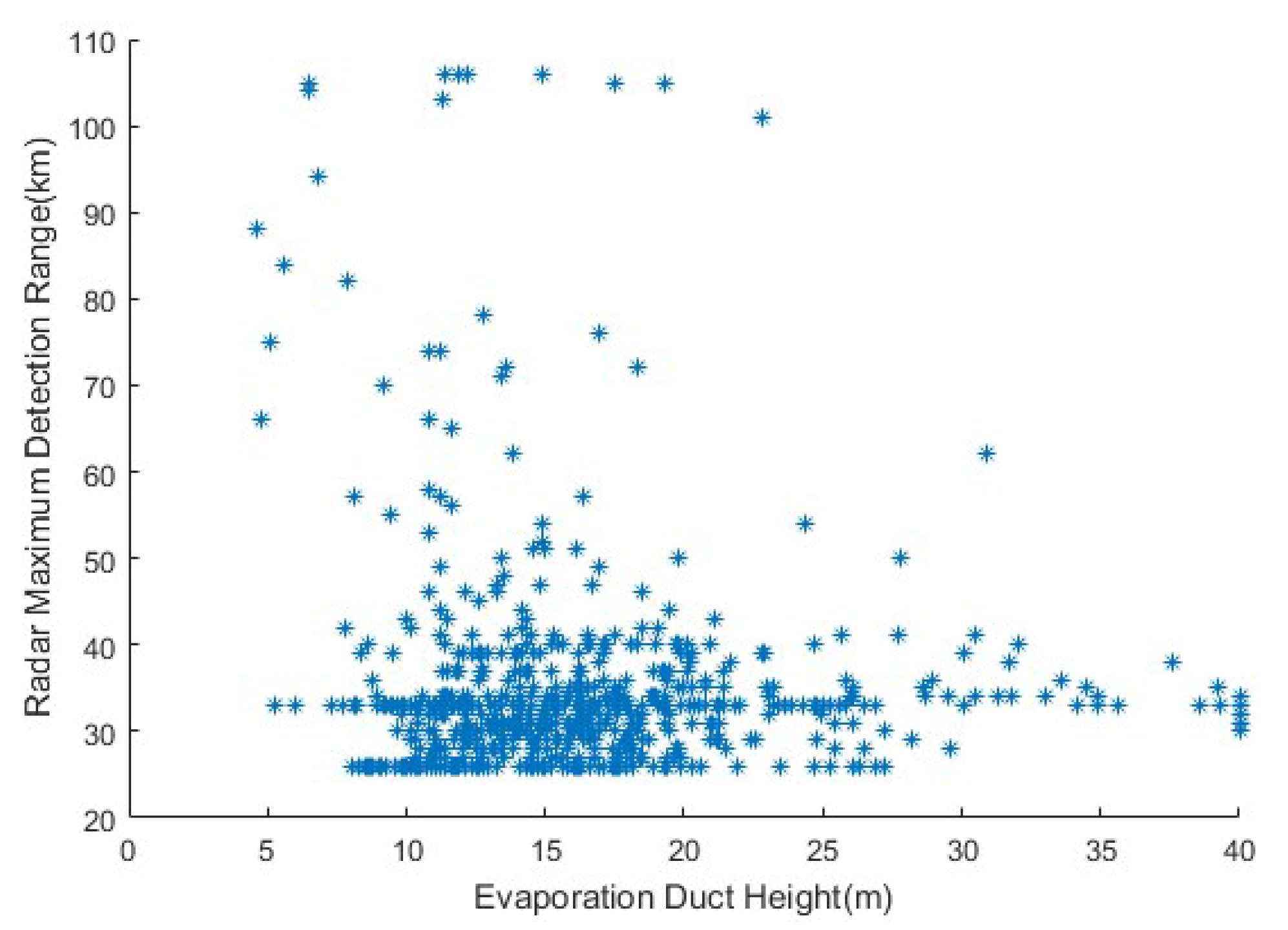
4.1. Over-the-Horizon Detection and Evaporation Duct Data Analysis
4.2. Case Study of Typical Over-the-Horizon Detection
4.3. Comprehensive Comparative Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sirkova, I.; Mikhalev, M. Parabolic Wave Equation Method Applied to the Tropospheric Ducting Propagation Problem: A Survey. Electromagnetics 2006, 26, 155–173. [Google Scholar] [CrossRef]
- Liu, X.Z.; Wu, Z.S.; Wang, H.G. Inversion Method of Regional Range-Dependent Surface Ducts with a Base Layer by Doppler Weather Radar Echoes Based on WRF Model. Atmosphere 2020, 11, 754. [Google Scholar] [CrossRef]
- Bech, J.; Codina, B.; Lorente, J. Forecasting Weather Radar Propagation Conditions. Meteorol. Atmos. Phys. 2007, 96, 229–243. [Google Scholar] [CrossRef]
- Compaleo, J.; Yardim, C.; Xu, L. Refractivity-from-Clutter Capable, Software-Defined, Coherenton-Receive Marine Radar. Radio. Sci. 2021, 56, e2020RS007173. [Google Scholar] [CrossRef]
- Wang, H.; Su, S.P.; Tang, H.C.; Jiao, L.; Li, Y. Atmospheric Duct Detection Using Wind Profiler Radar and RASS. J. Atmos. Ocean. Technol. 2019, 36, 557–565. [Google Scholar] [CrossRef]
- Sirkova, I. Duct Occurrence and Characteristics for Bulgarian Black Sea Shore Derived from ECMWF Data. J. Atmos. Sol. Terr. Phys. 2015, 135, 107–117. [Google Scholar] [CrossRef]
- Brooks, I.M.; Goroch, A.K.; Rogers, D.P. Observations of Strong Surface Radar Ducts over the Persian Gulf. J. Appl. Meteor. 1999, 38, 1293–1310. [Google Scholar] [CrossRef] [Green Version]
- Saeger, J.T.; Grimes, N.G.; Rickard, H.E.; Hackett, E.E. Evaluation of Simplified Evaporation Duct Refractivity Models for Inversion Problems. Radio Sci. 2015, 50, 1110–1130. [Google Scholar] [CrossRef]
- Zhang, Q.; Yang, K.D.; Shi, Y. Spatial and Temporal Variability of the Evaporation Duct in the Gulf of Aden. Tellus A 2016, 68, 29792. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.P.; Wu, Z.S.; Wang, B. An Adaptive Objective Function for Evaporation Duct Estimations from Radar Sea Echo. Chin. Phys. Lett. 2011, 28, 034301. [Google Scholar] [CrossRef]
- Han, J.; Wu, J.J.; Zhu, Q.L.; Wang, H.; Zhou, Y.; Jiang, M.; Zhang, S.; Wang, B. Evaporation Duct Height Nowcasting in China’s Yellow Sea Based on Deep Learning. Remote Sens. 2021, 13, 1577. [Google Scholar] [CrossRef]
- Wang, H.B.; Zhang, L.J.; Wang, H.G. The Climatological Analysis of the Lower Atmospheric Ducts in South China Sea. Chin. J. Radio Sci. 2019, 34, 533–642. [Google Scholar]
- Kaissassou, S.; Lenouo, A.; Tchawoua, C.; Lopez, P.; Gaye, A.T. Climatology of Radar Anomalous Propagation over West Africa. J. Atmos. Sol. Terr. Phys. 2015, 123, 1–12. [Google Scholar] [CrossRef]
- Patterson, W.L. Climatology of Marine Atmospheric Refractive Effects: A Compendium of the Integrated Refractive Effects Prediction System (IREPS) Historical Summaries. Naval Ocean Systems Center Tech. 1982, 573, 525. [Google Scholar]
- Babin, S.M. Surface Duct Height Distributions for Wallops Island, Virginia, 1985–1994. J. Appl. Meteorol. Climatol. 1996, 35, 86–93. [Google Scholar] [CrossRef] [Green Version]
- Mentes, Ş.; Kaymaz, Z. Investigation of Surface Duct Conditions over Istanbul, Turkey. J. Appl. Meteorol. Climatol. 2007, 46, 318–337. [Google Scholar] [CrossRef]
- Anderson, K.D. Radar Measurements at 16.5 GHz in the Oceanic Evaporation Duct. IEEE Trans. Antennas Propagat. 1989, 37, 100–106. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Wu, S.H. Experimental Study of Consistency About Evaporation Duct’s Appearance and the Radar’s Over-the-Horizon Detection. Ship Sci. Technol. 2009, 31, 77–79. [Google Scholar]
- Wang, Q.; Denny, P.; Alappattu, S.; Billingsley, S.; Burkholder, R.J.; Christman, A.J.; Creegan, E.D.; de Paolo, T.; Eleuterio, D.P.; Fernando, H.J.S.; et al. Casper: Coupled Air-Sea Processes and Electronmagnetic(EM) Wave Ducting Research. Amer. Meteor. Società. 2018, 99, 1449–1471. [Google Scholar] [CrossRef]
- Wang, Q.; Burkholder, R.J.; Yardim, C.; Xu, L.; Pozderac, J.; Christman, A.; Fernando, H.J.S.; Alappattu, D.P.; Wang, Q. Range and Height Measurement of X-Band EM Propagation in the Marine Atmospheric Boundary Layer. IEEE Trans. Antennas. Propagat. 2019, 67, 2063–2073. [Google Scholar] [CrossRef]
- Han, J.; Jiao, L. Assessment on the Shadow Zone Caused by the Atmospheric Duct for the Shipboard Radar and the Shadow Zone Filling Measures. J. Ocean. Technol. 2017, 36, 91–95. [Google Scholar]
- Atkinson, B.W.; Zhu, M. Coastal Effects on Radar Propagation in Atmospheric Ducting Conditions. Meteorol. App. 2005, 13, 53–62. [Google Scholar] [CrossRef]
- Yang, S.; Li, X.; Wu, C.; He, X.; Zhong, Y. Application of the PJ and NPS Evaporation Duct Models over the South China Sea (SCS) in Winter. PLoS ONE 2017, 12, e0172284. [Google Scholar] [CrossRef] [PubMed]
- Pastore, D.M.; Greenway, D.P.; Stanek, M.J.; Wessinger, S.E.; Haack, T.; Wang, Q.; Hackett, E.E. Comparison of Atmospheric Refractivity Estimation Methods and Their Influence on Radar Propagation Predictions. Radio. Sci. 2021, 56, e2020RS007244. [Google Scholar] [CrossRef]
- Skolnik, M.I. RADAR Systems; McGraw-Hill: New York, NY, USA, 2001. [Google Scholar]
- Sirkova, I. Brief Review on PE Method Application to Propagation Channel Modeling in Sea Environment. Open. Eng. 2012, 2, 19–38. [Google Scholar] [CrossRef]
- Wagner, M.; Gerstoft, P.; Rogers, T. Estimating Refractivity from Propagation Loss in Turbulent Media. Radio. Sci. 2016, 51, 1876–1894. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.G. Method and Experiment of Troposheric Ducts Inversion Using Ground-Based GNSS Occultation; Xidian University: Xi’an, China, 2013. [Google Scholar]
- The Concept of Transmission Loss for Radio Links. ITU-R P.341-7-2019. 2019. Available online: https://www.itu.int/dms_pubrec/itu-r/rec/p/R-REC-P.341-7-201908-I!!PDF-E.pdf (accessed on 26 April 2022).
- Calculation of Free-Space Attenuation. ITU-R P.525-4-2019. 2019. Available online: https://www.itu.int/dms_pubrec/itu-r/rec/p/R-REC-P.525-4-201908-I!!PDF-E.pdf (accessed on 26 April 2022).
- Palmer, A.J.; Baker, D.J. A Novel Simple Semi-Empirical Model for the Effective Earth Radius Factor. IEEE Trans. Broadcast. 2006, 52, 557–565. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Parameter Value |
|---|---|
| Frequency | 9400 MHz |
| Peak Power | 12 kw |
| Antenna Height | 17 m |
| Antenna Elevation Angle | 0° |
| Antenna Gain | 29 dB |
| Vertical Beam Width | 22° |
| Polarization Mode | Horizontal |
| Atmospheric Duct | No Atmospheric Duct | |
|---|---|---|
| Over-the-horizon | 14 | 1 |
| No over-the-horizon | 28 | 19 |
| No. | Time | Duct Top Height/m | Duct Bottom Height/m | Duct Thickness/m | Duct Strength/M | Duct Type | Radar Detection Distance/km |
|---|---|---|---|---|---|---|---|
| 1 | 2019090716 | 198.2 | 0 | 198.2 | 7.0 | Surface duct | 65 |
| 2 | 2019090718 | 170.6 | 0 | 170.6 | 8.7 | Surface duct | 74 |
| 3 | 2019090721 | 258.3 | 0 | 258.3 | 24.9 | Surface duct | 94 |
| 4 | 2019090813 | 685.7 | 558.4 | 127.3 | 3.2 | Elevated duct | 57 |
| 5 | 2019090819 | 235.7 | 0 | 235.7 | 24.9 | Surface duct | 106 |
| 6 | 2019090821 | 487.6 | 3.6 | 484.0 | 7.4 | Elevated duct | 103 |
| 7 | 2019091008 | 570.4 | 384.8 | 185.6 | 2.5 | Elevated duct | 46 |
| 8 | 2019091020 | 546.5 | 332.2 | 214.3 | 4.5 | Elevated duct | 41 |
| 9 | 2019091320 | 431.5 | 296.8 | 134.8 | 4.0 | Elevated duct | 40 |
| 10 | 2019091420 | 204.3 | 0 | 204.3 | 14.6 | Surface duct | 48 |
| 11 | 2019091508 | 10.6 | 0 | 10.6 | 1.6 | Surface duct | 39 |
| 12 | 2019091608 | 47.8 | 0 | 47.8 | 8.3 | Surface duct | 53 |
| 13 | 2019091708 | 21.7 | 0 | 21.7 | 1.1 | Surface duct | 55 |
| 14 | 2019091808 | 24.4 | 0 | 24.4 | 2.4 | Surface duct | 43 |
| 15 | 2019092317 | - | - | - | - | No duct | 40 |
| No. | Time | Evaporation Duct Height/m | Radar Detection Distance/km |
|---|---|---|---|
| 1 | 2019090716 | 11.6 | 65 |
| 2 | 2019090718 | 10.8 | 74 |
| 3 | 2019090721 | 6.8 | 94 |
| 4 | 2019090819 | 12.2 | 106 |
| 5 | 2019090821 | 11.3 | 103 |
| No. | Time | Evaporation Duct Height/m | Radar Detection Distance/km |
|---|---|---|---|
| 1 | 2019090813 | 16.4 | 57 |
| 2 | 2019091008 | 12.9 | 46 |
| 3 | 2019091020 | 14.3 | 41 |
| 4 | 2019091320 | 16.6 | 40 |
| 5 | 2019092317 | 33.6 | 40 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, L.-F.; Liu, C.-G.; Wang, H.-G.; Zhu, Q.-L.; Zhang, L.-J.; Han, J.; Zhang, Y.-S.; Wang, Q.-N. Experimental Analysis of Atmospheric Ducts and Navigation Radar Over-the-Horizon Detection. Remote Sens. 2022, 14, 2588. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14112588
Huang L-F, Liu C-G, Wang H-G, Zhu Q-L, Zhang L-J, Han J, Zhang Y-S, Wang Q-N. Experimental Analysis of Atmospheric Ducts and Navigation Radar Over-the-Horizon Detection. Remote Sensing. 2022; 14(11):2588. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14112588
Chicago/Turabian StyleHuang, Li-Feng, Cheng-Guo Liu, Hong-Guang Wang, Qing-Lin Zhu, Li-Jun Zhang, Jie Han, Yu-Sheng Zhang, and Qian-Nan Wang. 2022. "Experimental Analysis of Atmospheric Ducts and Navigation Radar Over-the-Horizon Detection" Remote Sensing 14, no. 11: 2588. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14112588