
Measurement of Aspect Angle of Field-Aligned Plasma Irregularities in Mid-Latitude E Region Using VHF Atmospheric Radar Imaging and Interferometry Techniques


Abstract
:1. Introduction
2. Measurement Techniques
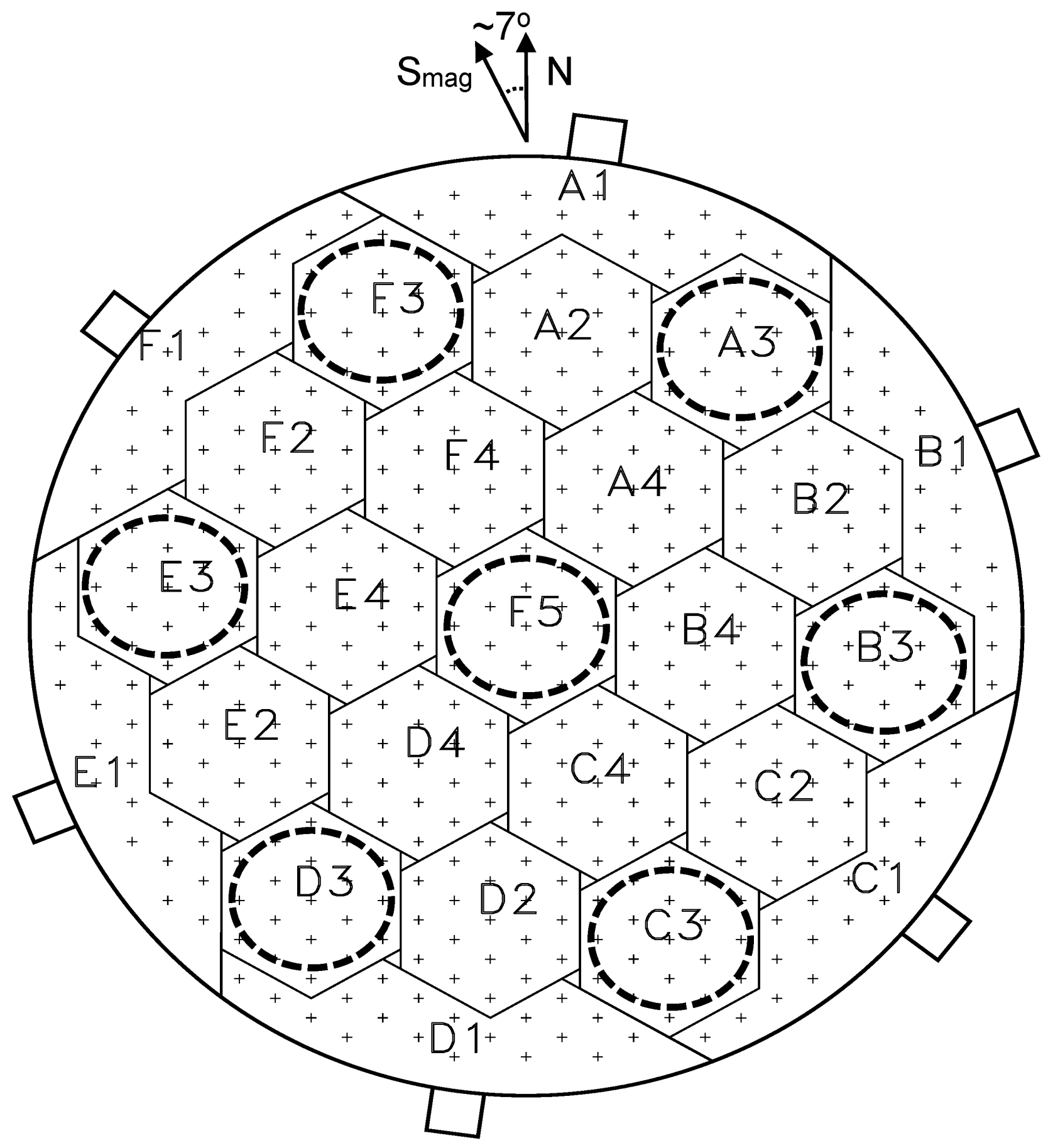
2.1. Radar Experimental Setup
2.2. Radar Imaging
2.3. Radar Interferometry
3. Results
3.1. Radar Imaging in 1D, 2D, and 3D
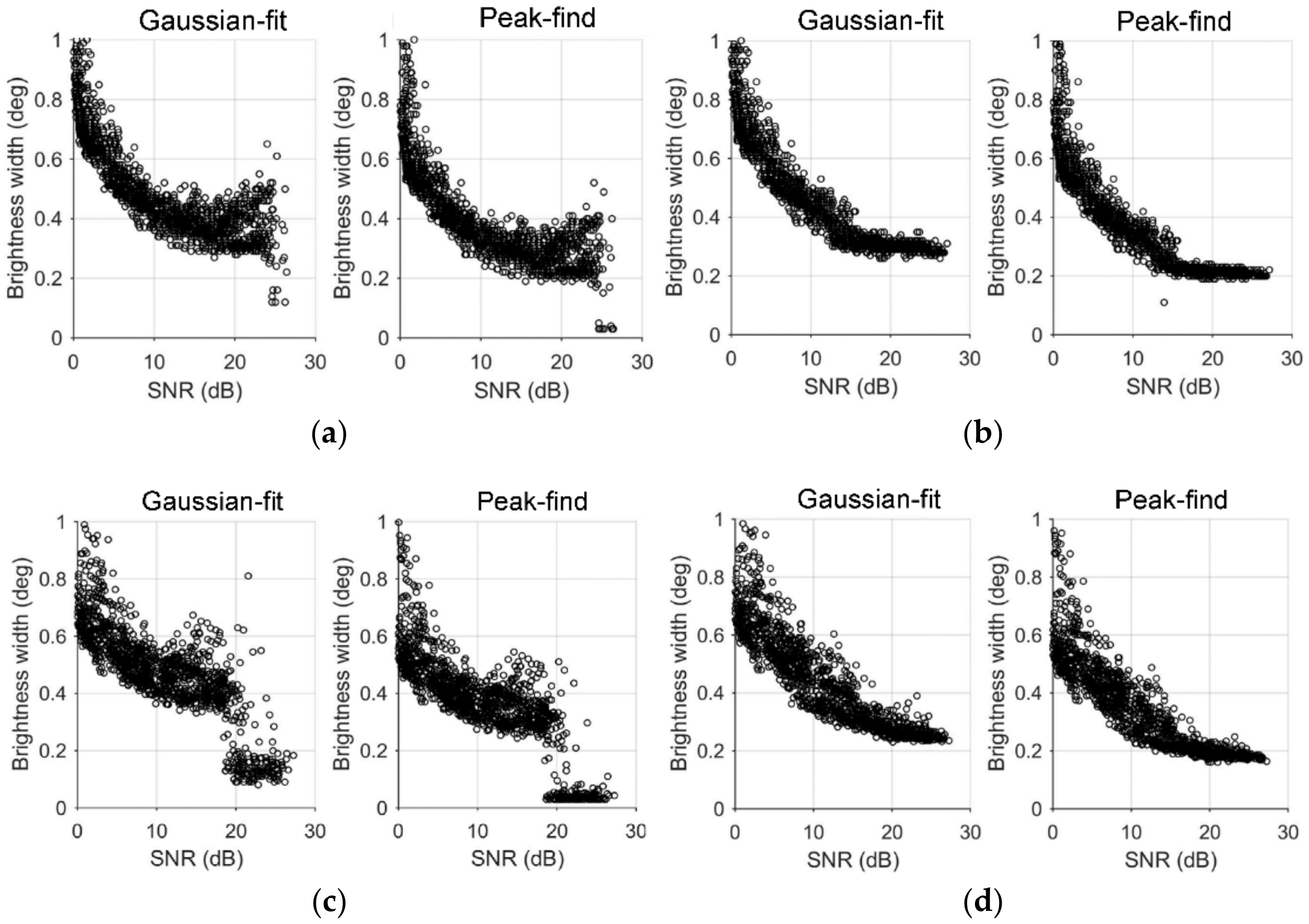
- Brightness width was SNR-dependent; generally, a larger SNR produced a smaller brightness width.
- The brightness widths retrieved from the Capon method (Figure 3a,c) were more divergent at higher SNR as compared with the result of NC-Capon (Figure 3b,d), regardless of 2D or 3D imaging, and in Gaussian fitting or peak-find processes. Moreover, a sudden drop of brightness width at large SNR can be seen in the Capon result. This drop, together with divergence of brightness widths at larger SNR, implied a failure in using the Capon method for these cases.
- As revealed from the outcomes at higher SNR, Figure 3b,d shows that Gaussian-fitted brightness widths were about 0.1° larger than those of the peak-find method.


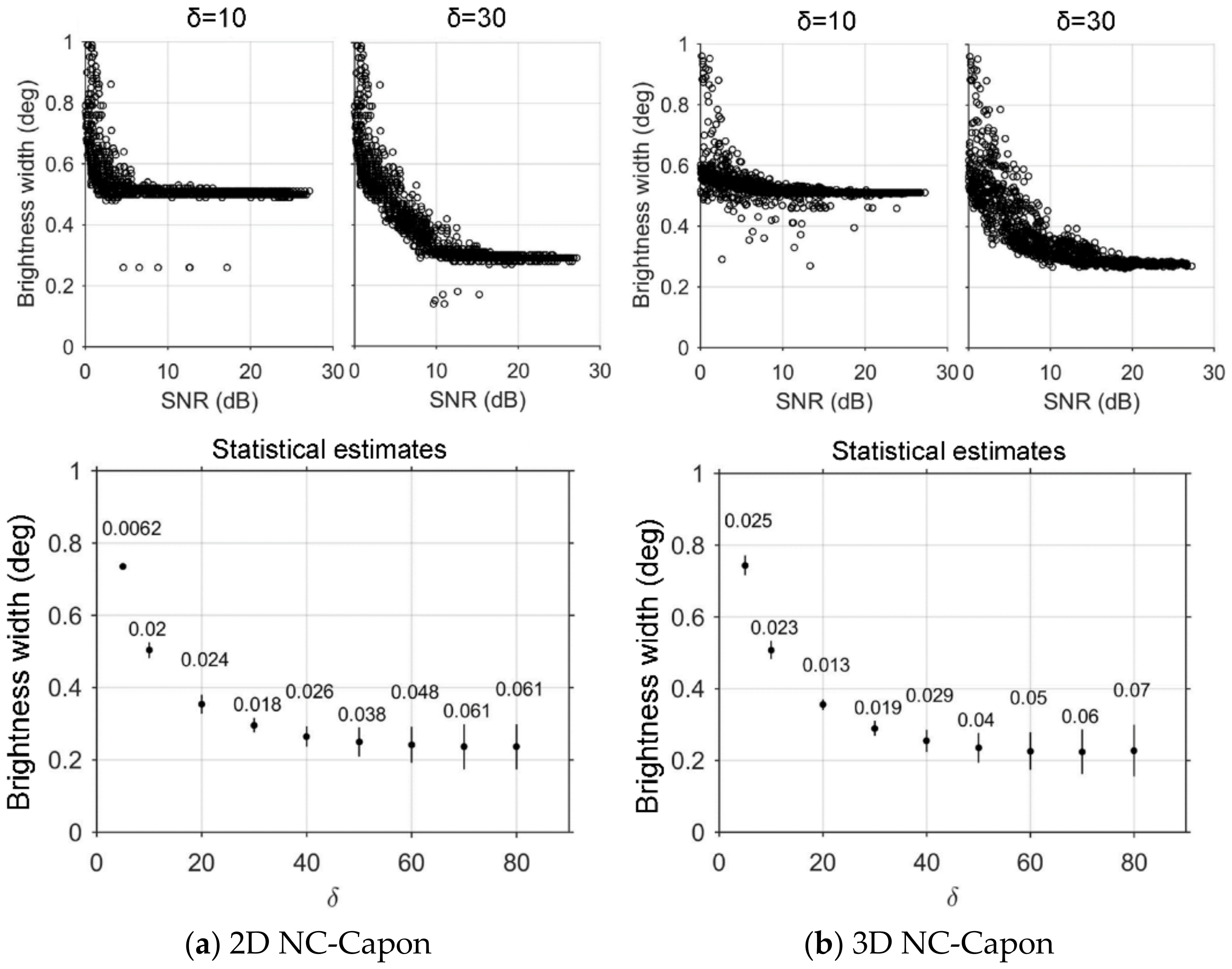
3.2. SNR Effect
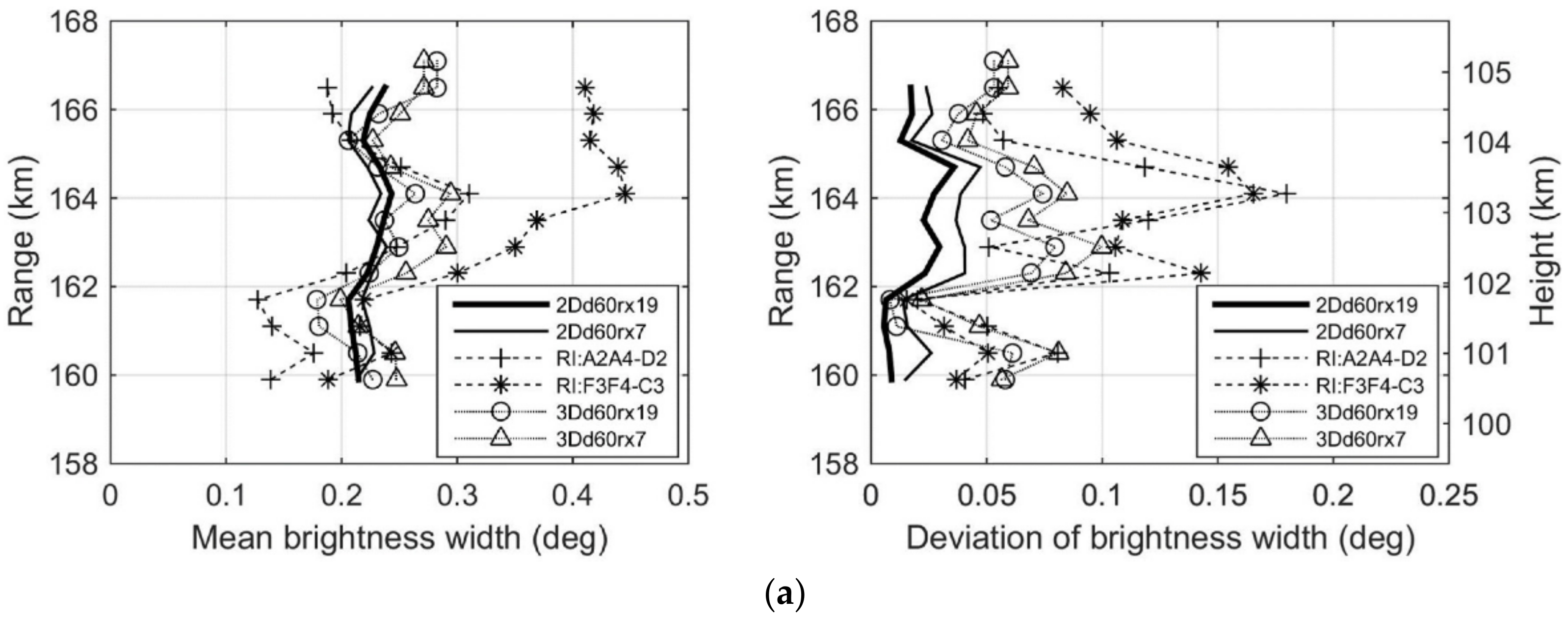
3.3. Radar Interferometry
- The scatter plots from the original coherence values show that brightness widths were SNR dependent, as seen in the left subpanels of panels (a)–(d). The scenario was similar to that of 2D and 3D imaging shown in Figure 7. Nevertheless, there were more outliers than in 2D and 3D imaging, i.e., more divergent in the distribution.
- Correction of the SNR effect indeed reduced the brightness width significantly, as shown in the right subpanels of panels (a)–(d). Many brightness widths at lower SNR were now closer to the events at higher SNRs. However, brightness widths still spread over a wider interval of angle than in 2D and 3D imaging.
- The outcomes of the two sets of subarrays shown in (b) and (c) were more concentrated than in (a) and (d), although the baselines of the subarrays of (b) and (c) were not exactly linear.

3.4. Statistical Comparison of Aspect Angles
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Radar Imaging
References
- Hocking, W.K.; Fukao, S.; Tsuda, T.; Yamamoto, M.; Sato, T.; Kato, S. Aspect sensitivity of stratospheric VHF radar wave scatterers, particularly above 15-km altitude. Radio Sci. 1990, 25, 613–627. [Google Scholar] [CrossRef]
- Chen, J.-S.; Furumoto, J. Measurement of atmospheric aspect sensitivity using coherent radar imaging after mitigation of radar beam weighting effect. J. Atmos. Ocean. Technol. 2013, 30, 245–259. [Google Scholar] [CrossRef]
- Kudeki, E.; Farley, D. Aspect sensitivity of equatorial electrojet irregularities and theoretical implications. J. Geophys. Res. 1989, 94, 426–434. [Google Scholar] [CrossRef]
- Farley, D.T.; Hysell, D.L. Radar measurement of very small aspect angles in the equatorial ionosphere. J. Geophys. Res. 1996, 101, 5177–5184. [Google Scholar] [CrossRef]
- Huang, C.-M.; Kudeki, E.S.; Frank, J.; Liu, C.-H.; Röttger, J. Brightness distribution of mid-latitude E region echoes detected at Chung-LI VHF radar. J. Geophys. Res. 1995, 100, 14703–14715. [Google Scholar] [CrossRef]
- Lu, F.; Farley, D.T.; Swartz, W.E. Spread in aspect angles of equatorial E region irregularities. J. Geophys. Res. 2008, 113, A11309. [Google Scholar]
- Briggs, B.H. Radar measurements of aspect sensitivity of atmospheric scatterers using spaced-antenna correlation techniques. J. Atmos. Terr. Phys. 1992, 54, 153–165. [Google Scholar] [CrossRef]
- Hooper, D.; Thomas, L. Aspect sensitivity of VHF scatterers in the troposphere and stratosphere from comparison of powers in off-vertical beams. J. Atmos. Terr. Phys. 1995, 57, 655–663. [Google Scholar] [CrossRef]
- Worthington, R.M.; Palmer, R.D.; Fukao, S. Complete maps of the aspect sensitivity of VHF atmospheric radar echoes. Ann. Geophys. 1999, 17, 1116–1119. [Google Scholar] [CrossRef]
- Palmer, R.D.; Larsen, M.F.; Fukao, S.; Yamamoto, M. On the relationship between aspect sensitivity and spatial interferometric in-beam incident angles. J. Atmos. Sol. Terr. Phys. 1998, 60, 37–48. [Google Scholar] [CrossRef]
- Tsuda, T.; VanZandt, T.E.; Saito, H. Zenith-angle dependence of VHF specular reflection echoes in the lower atmosphere. J. Atmos. Sol. Terr. Phys. 1997, 59, 761–775. [Google Scholar] [CrossRef]
- Chu, Y.-H.; Chao, J.-K.; Liu, C.-H.; Röttger, J. Aspect sensitivity at tropospheric heights measured with vertically pointed beam of the Chung-Li VHF radar. Radio Sci. 1990, 25, 539–550. [Google Scholar] [CrossRef]
- Zecha, M.; Bremer, J.; Latteck, R.; Singer, W.; Hoffmann, P. Properties of midlatitude mesosphere summer echoes after three seasons of VHF radar observations at 54°N. J. Geophys. Res. 2003, 108, 8439. [Google Scholar] [CrossRef]
- Wang, C.-Y.; Chu, Y.-H.; Su, C.-L.; Kuong, R.-M.; Chen, H.-C.; Yang, K.-F. Statistical investigations of layer-type and clump-type plasma structures of 3-m field-aligned irregularities in nighttime sporadic E region made with Chung-Li VHF radar. J. Geophys. Res. 2011, 116, A12311. [Google Scholar] [CrossRef] [Green Version]
- Palmer, R.D.; Gopalam, S.; Yu, T.-Y.; Fukao, S. Coherent radar imaging using Capon’s method. Radio Sci. 1998, 33, 1585–1598. [Google Scholar] [CrossRef]
- Chilson, P.B.; Yu, T.-Y.; Palmer, R.D.; Kirkwood, S. Aspect sensitivity measurements of polar mesosphere summer echoes using coherent radar imaging. Ann. Geophys. 2002, 20, 213–223. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.-S.; Wang, C.-Y.; Su, C.-L.; Chu, Y.-H. Meteor observations using radar imaging techniques and norm-constrained Capon method. Planet. Space Sci. 2020, 184, 104884. [Google Scholar] [CrossRef]
- Hashiguchi, H.; Manjo, T.; Yamamoto, M. Development of Middle and Upper atmosphere radar real-time processing system with adaptive clutter rejection. Radio Sci. 2018, 53, 83–92. [Google Scholar] [CrossRef]
- Nishimura, K.; Nakamura, T.; Sato, T.; Sato, K. Adaptive Beamforming Technique for Accurate Vertical Wind Measurements with Multichannel MST Radar. J. Atmos. Ocean. Technol. 2012, 29, 1769–1775. [Google Scholar] [CrossRef]
- Kamio, K.; Nishimura, K.; Sato, T. Adaptive sidelobe control for clutter rejection of atmospheric radars. Ann. Geophys. 2004, 22, 4005–4012. [Google Scholar] [CrossRef]
- Yu, T.-Y.; Palmer, R.D. Atmospheric radar imaging using multiple-receiver and multiple-frequency techniques. Radio Sci. 2001, 36, 1493–1503. [Google Scholar] [CrossRef]
- Hassenpflug, G.; Yamamoto, M.; Luce, H.; Fukao, S. Description and demonstration of the new Middle and Upper atmosphere radar imaging system: 1-D, 2-D, and 3-D imaging of troposphere and stratosphere. Radio Sci. 2008, 43, RS2013. [Google Scholar] [CrossRef]
- Yu, T.-Y.; Furumoto, J.; Yamamoto, M. Clutter suppression for high-resolution atmospheric observations using multiple receivers and multiple frequencies. Radio Sci. 2010, 45, 1–15. [Google Scholar] [CrossRef]
- Chen, J.-S.; Furumoto, J.; Yamamoto, M. Three-dimensional radar imaging of atmospheric layer and turbulence structures using multiple receivers and multiple frequencies. Ann. Geophys. 2014, 32, 899–909. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.-S.; Wang, C.-Y.; Chu, Y.-H.; Su, C.-L.; Hashiguchi, H. 3-D radar imaging of E-region field-aligned plasma irregularities by using multireceiver and multifrequency techniques. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5591–5599. [Google Scholar] [CrossRef]
- Lin, F.-F.; Wang, C.-Y.; Su, C.-L.; Shiokawa, K.; Saito, S.; Chu, Y.-H. Coordinated observations of F region 3 m field-aligned plasma irregularities associated with medium-scale traveling ionospheric disturbances. J. Geophys. Res. Space Phys. 2016, 121, 3750–3766. [Google Scholar] [CrossRef]
- Yin, W.; Jin, W.; Zhou, C.; Liu, Y.; Tang, Q.; Liu, M.; Chen, G.; Zhao, Z. Lightning detection and imaging based on VHF radar interferometry. Remote Sens. 2021, 13, 2065. [Google Scholar] [CrossRef]
- Su, C.-L.; Chen, H.-C.; Chu, Y.-H.; Chung, M.-Z.; Kuong, R.-M.; Lin, T.-H.; Tzeng, K.-J.; Wang, C.-Y.; Wu, K.-H.; Yang, K.-F. Meteor radar wind over Chung-Li (24.9°N, 121°E), Taiwan, for the period 10–25 November 2012 which includes Leonid meteor shower: Comparison with empirical model and satellite measurements. Radio Sci. 2014, 49, 597–615. [Google Scholar] [CrossRef] [Green Version]
- Supplementary Brightness Maps of Radar Imaging. Available online: https://drive.google.com/drive/folders/1u-2wSzr5jdeMzXG7F_ZC0I-8SziWtoJC?usp=sharing (accessed on 27 August 2021).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Beam direction | Geographic north, 51° zenith |
| Interpulse period (IPP) | 0.0015 s |
| Pulse length | 4 μs |
| Sampling time step | 4 μs |
| Number of sampling gates | 128 |
| Integration times | 1 |
| Pulse codes | no |
| Carrier frequencies | 46.25, 46.375, 46.5, 46.625, and 46.75 MHz |
| Receiver channels | Full array and 19 subarrays A2–F5, exclusive of A1, B1, C1, D1, E1, F1 |
| Sampling range (height) | 120.0–196.8 km (~75.518–123.850 km) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.-S.; Wang, C.-Y.; Chu, Y.-H. Measurement of Aspect Angle of Field-Aligned Plasma Irregularities in Mid-Latitude E Region Using VHF Atmospheric Radar Imaging and Interferometry Techniques. Remote Sens. 2022, 14, 611. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14030611
Chen J-S, Wang C-Y, Chu Y-H. Measurement of Aspect Angle of Field-Aligned Plasma Irregularities in Mid-Latitude E Region Using VHF Atmospheric Radar Imaging and Interferometry Techniques. Remote Sensing. 2022; 14(3):611. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14030611
Chicago/Turabian StyleChen, Jenn-Shyong, Chien-Ya Wang, and Yen-Hsyang Chu. 2022. "Measurement of Aspect Angle of Field-Aligned Plasma Irregularities in Mid-Latitude E Region Using VHF Atmospheric Radar Imaging and Interferometry Techniques" Remote Sensing 14, no. 3: 611. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14030611