
High-Precision Registration of Lunar Global Mapping Products Based on Spherical Triangular Mesh

 , ,
, ,
Abstract
:1. Introduction
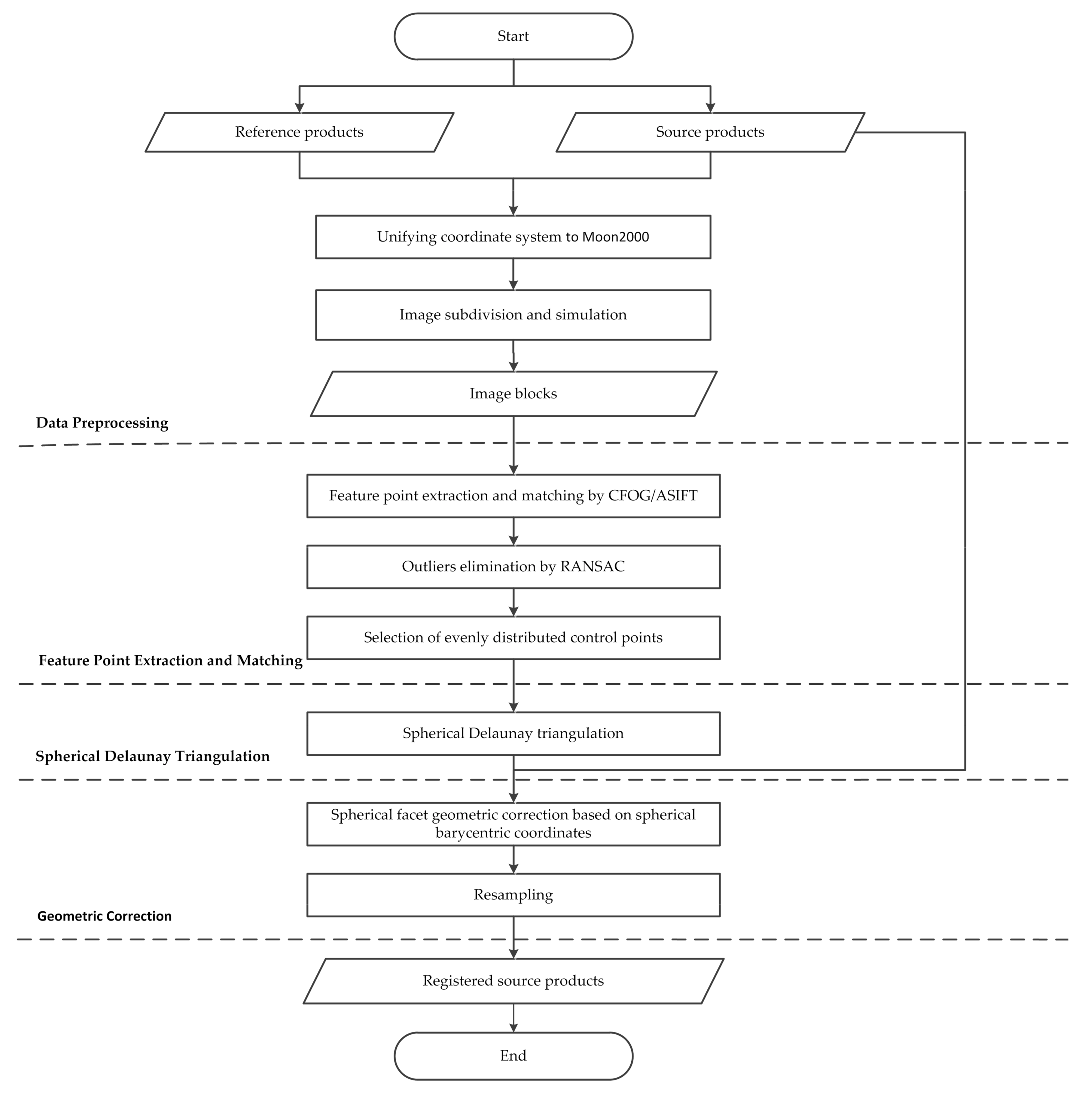
2. Methodology
2.1. Data Preprocessing
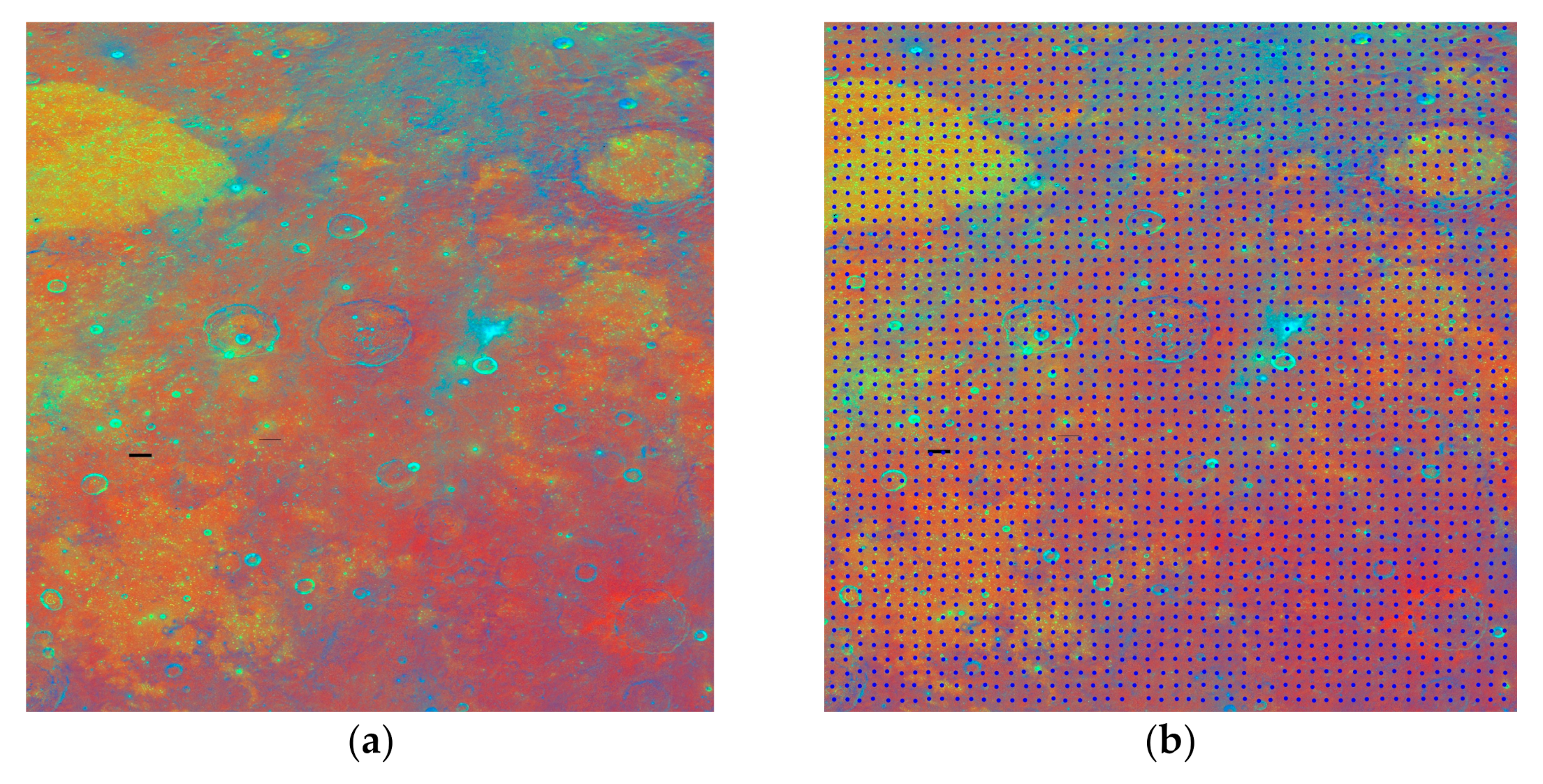
2.2. Feature Point Extraction and Matching
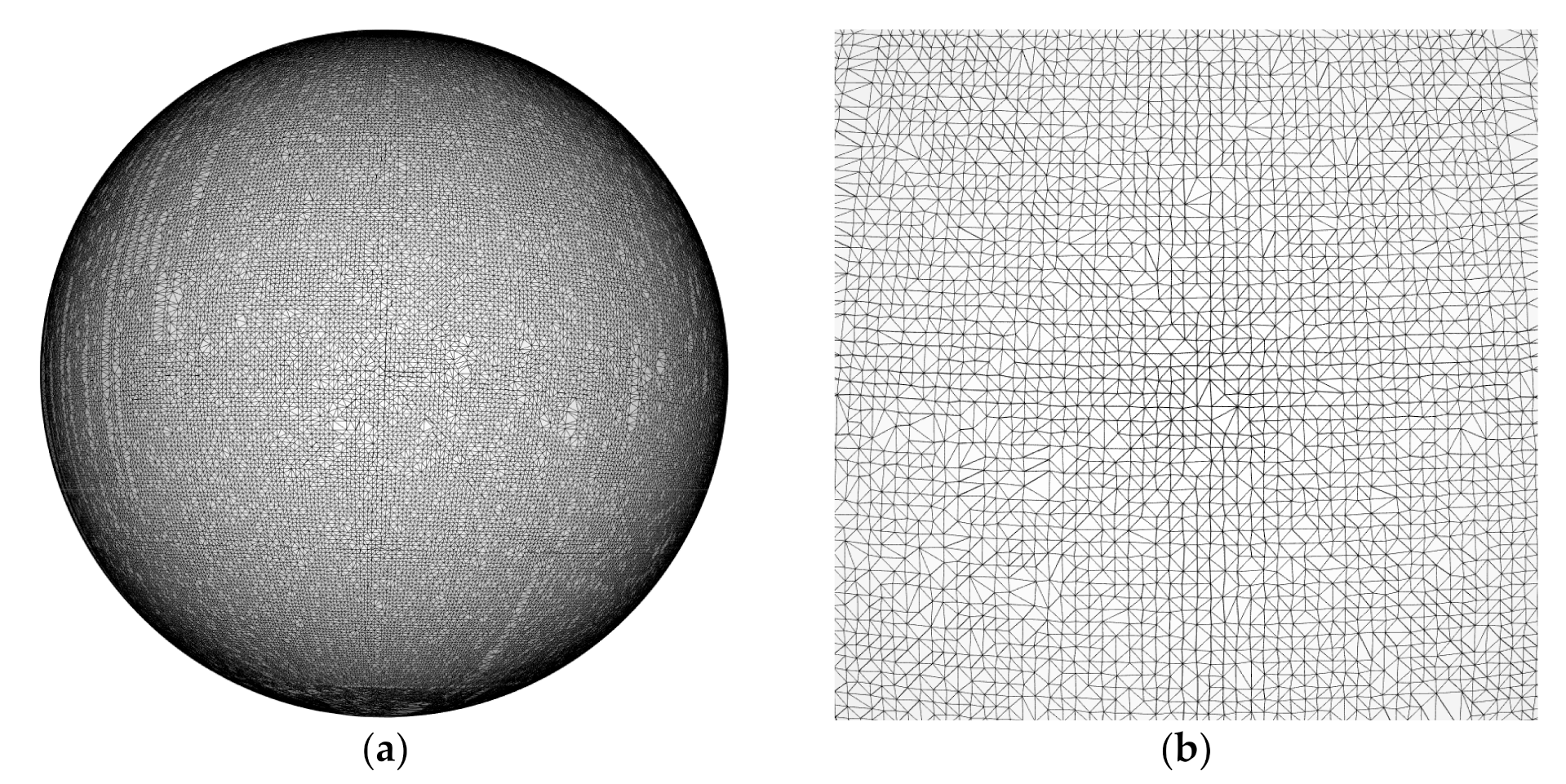
2.3. Spherical Delaunay Triangulation
- (1)
- The convex hull H of the spherical scatter point set V is established to enclose all the data points. A convex hull is a minimum convex polyhedron containing a series of known vertices in spatial geometry. In this algorithm, the convex hull consists of eight triangular faces determined by six vertices.
- (2)
- Find the spherical triangle T that contains the insertion point P in the constructed convex hull H or triangulation network. T is then triangulated by connecting the insertion point P to the three vertices of T to form three new spherical triangles.
- (3)
- A local optimization process (LOP) is used to optimize the triangle triangulation; that is, by exchanging diagonals to ensure that the triangle formed is a Delaunay triangle.
- (4)
- Repeat (2) and (3) until the last point has been inserted.
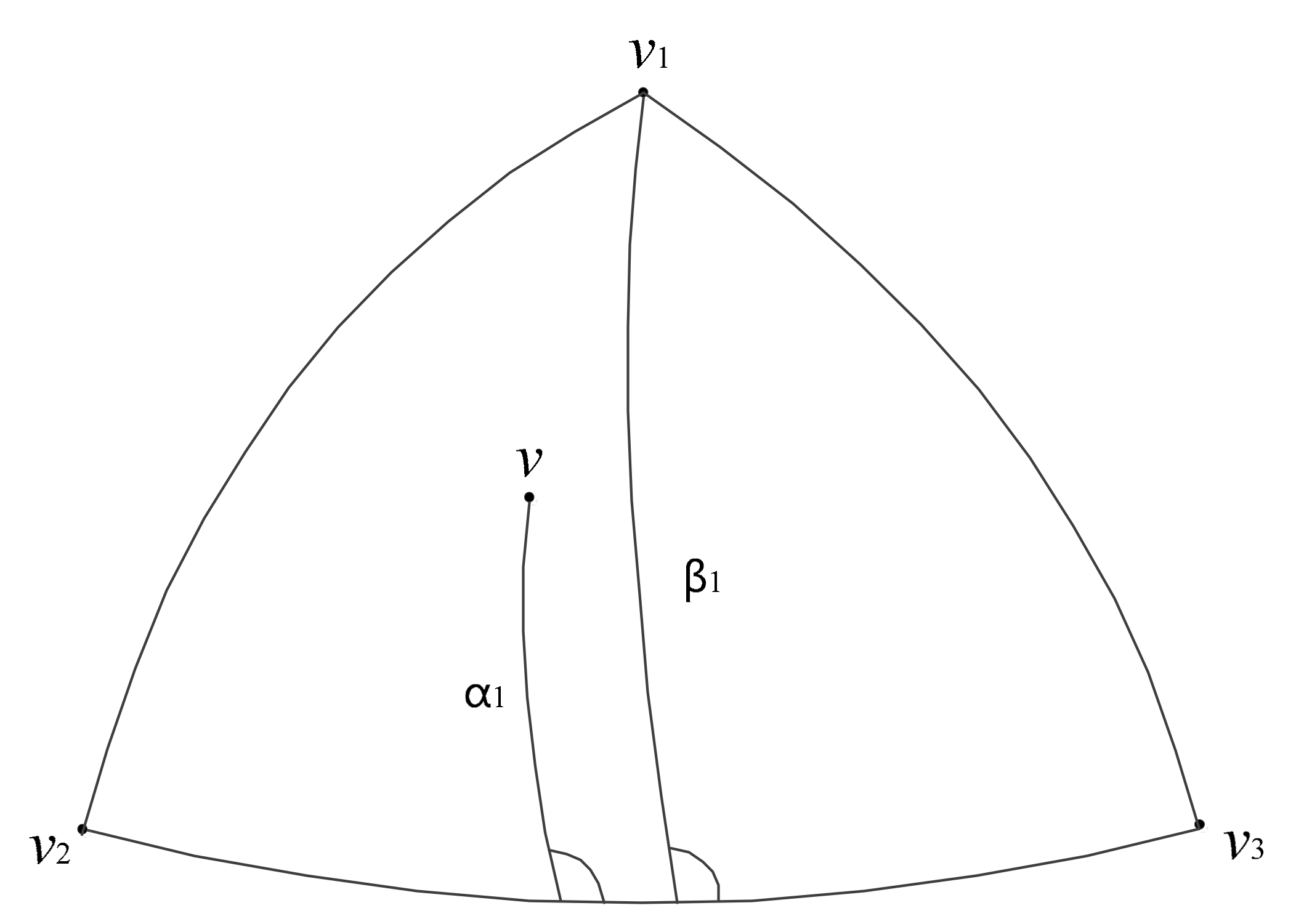
2.4. Spherical Geometric Correction Based on Spherical Barycentric Coordinates
3. Experimental Results
3.1. Experimental Data
3.2. Data Preprocessing, Matching, and Spherical Delaunay Triangulation Results
3.3. Registration Results and Analysis
3.3.1. Quantitative Analysis
3.3.2. Qualitative Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Smith, D.E.; Zuber, M.T.; Neumann, G.A.; Lemoine, F.G. Topography of the Moon from the Clementine lidar. J. Geophys. Res. 1997, 102, 1591–1611. [Google Scholar] [CrossRef]
- Robinson, M.S.; McEwen, A.S.; Eliason, E.; Lee, E.M.; Malaret, E.; Lucey, P.G. Clementine UVVIS global mosaic: A new tool for understanding the lunar crust. In Proceedings of the Lunar and Planetary Science Conference, Houston, TX, USA, 15–29 March 1999. [Google Scholar]
- Eliason, E.; Isbell, C.; Lee, E.; Becker, T.; Gaddis, L.; McEwen, A.; Robinson, M. The Clementine UVVIS Global Lunar Mosaic; Lunar and Planetary Institute: Houston, TX, USA, 1999. [Google Scholar]
- Hare, T.M.; Archinal, B.A.; Becker, T.L.; Gaddis, L.R.; Lee, E.M.; Redding, B.L.; Rosiek, M.R. Clementine mosaics warped to ULCN2005 network. In Proceedings of the 39th Annual Lunar and Planetary Science Conference, League City, TX, USA, 10–14 March 2008; p. 2337. [Google Scholar]
- Lee, E.M.; Gaddis, L.R.; Weller, L.; Richie, J.O.; Becker, T.; Shinaman, J.; Rosiek, M.R.; Archinal, B.A. A new Clementine basemap of the Moon. In Proceedings of the 40th Annual Lunar and Planetary Science Conference, The Woodlands, TX, USA, 23–27 March 2009; p. 2445. [Google Scholar]
- WAC Global Morphologic Map. Available online: http://wms.lroc.asu.edu/lroc/view_rdr/WAC_GLOBAL (accessed on 10 April 2018).
- LRO CameraTeam Release High Resolution Global Topographic Map of Moon. Available online: http://www.nasa.gov/mission_pages/LRO/news/lro-topo.html (accessed on 10 April 2018).
- Wagner, R.V.; Speyerer, E.J.; Robinson, M.S.; LROC Team. New mosaicked data products from the LROC team. In Proceedings of the 46th Annual Lunar and Planetary Science Conference, The Woodlands, TX, USA, 16–20 March 2015; p. 1473. [Google Scholar]
- Haruyama, J.; Ohtake, M.; Matsunaga, T.; Otake, H.; Yamamoto, S. Data Products of SELENE (Kaguya) Terrain Camera for Future Lunar Missions. In Proceedings of the 45th Annual Lunar and Planetary Science Conference, The Woodlands, TX, USA, 17–21 March 2014. [Google Scholar]
- Taylor, L.A.; Pieters, C.; Patchen, A.; Taylor, D.S.; Morris, R.V.; Keller, L.P.; McKay, D.S. Mineralogical and chemical characterization of lunar highland soils: Insights into the space weathering of soils on airless bodies. J. Geophys. Res. 2010, 115, E02002. [Google Scholar] [CrossRef]
- Ohtake, M.; Pieters, C.M.; Isaacson, P.; Besse, S.; Green, R.O. One Moon, many measurements 3: Spectral reflectance. Icarus 2013, 226, 364–374. [Google Scholar] [CrossRef]
- Li, C.; Su, Y.; Wen, W.; Bian, W.; Zhao, B.; Yang, J.; Zou, X.; Wang, M.; Xu, C.; Kong, D. The global image of the Moon obtained by the chang’e-1: Data processing and lunar cartography. Sci. China 2010, 53, 1091–1102. [Google Scholar] [CrossRef]
- Li, C.; Ren, X.; Liu, J.; Zou, X.; Mu, L.; Wang, J.; Shu, R.; Zou, Y.; Zhang, H.; Chang, L. Laser altimetry data of chang’e-1 and the global lunar dem model. Sci. China Ser. D Earth Sci. 2010, 40, 281–293. [Google Scholar] [CrossRef]
- Li, C.; Liu, J.; Ren, X.; Yan, W.; Zuo, W.; Mou, L.; Zhang, H.; Su, Y.; Wen, W.; Tan, X.; et al. Lunar Global High-precision Terrain Reconstruction Based on Chang’e-2 Stereo Images. Geomat. Inf. Sci. Wuhan Univ. 2018, 43, 485–495. [Google Scholar]
- Barker, M.K.; Mazarico, E.; Neumann, G.A.; Zuber, M.T.; Haruyama, J.; Smith, D.E. A new lunar digital elevation model from the Lunar Orbiter Laser Altimeter and SELENE Terrain Camera. Icarus 2016, 273, 346–355. [Google Scholar] [CrossRef] [Green Version]
- Xin, X.; Liu, B.; Di, K.; Yue, Z.; Gou, S. Geometric quality assessment of chang’e-2 global DEM product. Remote Sens. 2020, 12, 526. [Google Scholar] [CrossRef] [Green Version]
- Di, K.; Liu, B.; Xin, X.; Yue, Z.; Ye, L. Advances and applications of lunar photogrammetric mapping using orbital images. Acta Geod. Et Cartogr. Sin. 2019, 48, 1562. [Google Scholar]
- Kirk, R.L.; Archinal, B.A.; Gaddis, L.R.; Rosiek, M.R. Lunar Cartography: Progress in the 2000s and prospects for the2010s. In Proceedings of the 2012 ISPRS-International Archives of the Photogrammetry Remote Sensing and Spatial Information Sciences, Melbourne, Australia, 25 August–1 September 2012; Volume XXXIX-B4, pp. 489–494. [Google Scholar]
- Wu, B.; Guo, J.; Hu, H.; Li, Z.; Chen, Y. Co-registration of lunar topographic models derived from Chang’E-1, SELENE, and LRO laser altimeter data based on a Novel surface matching method. Earth Planet Sci. Lett. 2013, 364, 68–84. [Google Scholar] [CrossRef]
- Xin, X.; Liu, B.; Di, K.; Jia, M.; Oberst, J. High-precision co-registration of orbiter imagery and digital elevation model constrained by both geometric and photometric information. ISPRS J. Photogramm. Remote Sens. 2018, 144, 28–37. [Google Scholar] [CrossRef]
- Zitova, B.; Flusser, J. Image registration methods: A survey. Image Vis. Comput. 2003, 21, 977–1000. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Wei, W.; Hao, Y. Automatic registration of multisensor images with affine deformation based on triangle area representation. J. Electron. Imaging 2013, 22, 3002. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Morel, J.M.; Yu, G. ASIFT: A New Framework for Fully Affine Invariant Image Comparison. SIAM J. Imaging Sci. 2009, 2, 438–469. [Google Scholar] [CrossRef]
- Bay, H.; Tuytelaars, T.; Van Gool, L. Surf: Speeded up robust features. In Proceedings of the European Conference on Computer Vision, Graz, Austria, 7–13 May 2006; pp. 404–417. [Google Scholar]
- Yi, Z.; Zhiguo, C.; Yang, X. Multi-spectral remote image registration based on SIFT. Electron. Lett. 2008, 44, 107–108. [Google Scholar] [CrossRef]
- Sedaghat, A.; Mokhtarzade, M.; Ebadi, H. Uniform robust scale-invariant feature matching for optical remote sensing images. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4516–4527. [Google Scholar] [CrossRef]
- Fan, J.; Yan, W.; Ming, L.; Liang, W.; Cao, Y. Sar and optical image registration using nonlinear diffusion and phase congruency structural descriptor. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5368–5379. [Google Scholar] [CrossRef]
- Sun, H.; Lei, L.; Zou, H.; Wang, C. Multimodal remote sensing image registration using multiscale self-similarities. In Proceedings of the IEEE International Conference on Computer Vision in Remote Sensing, Xiamen, China, 16–18 December 2012; pp. 199–202. [Google Scholar]
- Sedaghat, A.; Ebadi, H. Distinctive order based self-similarity descriptor for multi-sensor remote sensing image matching. ISPRS J. Photogramm. Remote Sens. 2015, 108, 62–71. [Google Scholar] [CrossRef]
- Xiong, X.; Xu, Q.; Jin, G.; Zhang, H.; Gao, X. Rank-based local self-similarity descriptor for optical-to-sar image matching. IEEE Geosci. Remote Sens. Lett. 2019, 17, 1742–1746. [Google Scholar] [CrossRef]
- Ye, Y.; Shan, J.; Bruzzone, L.; Shen, L. Robust registration of multimodal remote sensing images based on structural similarity. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2941–2958. [Google Scholar] [CrossRef]
- Ye, Y.; Bruzzone, L.; Shan, J.; Bovolo, F.; Zhu, Q. Fast and Robust Matching for Multimodal Remote Sensing Image Registration. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9059–9070. [Google Scholar] [CrossRef] [Green Version]
- Wang, G.; Chen, Y. Robust feature matching using guided local outlier factor. Pattern Recognit. 2021, 117, 107986. [Google Scholar] [CrossRef]
- Liu, Y.; Li, Y.; Dai, L.; Yang, C.; Wei, L.; Lai, T.; Chen, R. Robust feature matching via advanced neighborhood topology consensus. Neurocomputing 2021, 421, 273–284. [Google Scholar] [CrossRef]
- Li, G.; Yu, L.; Fei, S. A deep-learning real-time visual slam system based on multi-task feature extraction network and self-supervised feature points. Measurement 2021, 168, 108403. [Google Scholar] [CrossRef]
- Song, Z.; Zhou, S.; Guan, J. A novel image registration algorithm for remote sensing under affine transformation. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4895–4912. [Google Scholar] [CrossRef]
- Dai, X.; Khorram, S. A feature-based image registration algorithm using improved chain-code representation combined with invariant moments. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2351–2362. [Google Scholar]
- Moigne, J.L. Introduction to remote sensing image registration. In Proceedings of the International Geoscience and Remote Sensing Symposium. Software Engineering Division, NASA Goddard Space Flight Center, Greenbelt, MD, USA, 23–28 July 2017; pp. 2565–2568. [Google Scholar]
- Wong, A.; Clausi, D.A. Arrsi: Automatic registration of remote-sensing images. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1483–1493. [Google Scholar] [CrossRef]
- Gong, M.; Zhao, S.; Jiao, L.; Tian, D.; Wang, S. A novel coarse-to-fine scheme for automatic image registration based on SIFT and mutual information. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4328–4338. [Google Scholar] [CrossRef]
- Liang, J.; Liu, X.; Huang, K.; Li, X.; Wang, D.; Wang, X. Automatic registration of multisensor images using an integrated Spatial and Mutual Information (SMI) metric. IEEE Trans. Geosci. Remote Sens. 2014, 52, 603–615. [Google Scholar] [CrossRef]
- Goshtasby, A. Piecewise linear mapping functions for image registration. Pattern Recognit. 1986, 19, 459–466. [Google Scholar] [CrossRef]
- Goshtasby, A. Piecewise cubic mapping functions for image registration. Pattern Recognit. 1987, 20, 525–533. [Google Scholar] [CrossRef]
- Goshtasby, A. Image registration by local approximation methods. Image Vis. Comput. 1988, 6, 255–261. [Google Scholar] [CrossRef]
- Flusser, J. An adaptive method for image registration. Pattern Recognit. 1992, 25, 45–54. [Google Scholar] [CrossRef]
- Goshtasby, A. Registration of images with geometric distortions. IEEE Trans. Geosci. Remote Sens. 1988, 26, 60–64. [Google Scholar] [CrossRef]
- Bookstein, F.L. Principal warps: Thin-plate splines and the decomposition of deformations. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 567–585. [Google Scholar] [CrossRef] [Green Version]
- Bentoutou, Y.; Taleb, N.; Kpalma, K.; Ronsin, J. An automatic image registration for applications in remote sensing. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2127–2137. [Google Scholar] [CrossRef]
- Di, K.; Jia, M.; Xin, X.; Wang, J.; Liu, B.; Li, J.; Xie, J.; Liu, Z.; Peng, M.; Yue, Z.; et al. High-resolution large-area digital orthophoto map generation using lroc nac images. Photogramm. Eng. Remote Sens. 2019, 85, 481–491. [Google Scholar] [CrossRef]
- Ehlers, M.; Fogel, D.N. High-precision geometric correction of airborne remote sensing revisited: The multiquadric interpolation. Proc. SPIE Int. Soc. Opt. Eng. 1994, 2315, 814–824. [Google Scholar]
- Zagorchev, L.; Goshtasby, A. A comparative study of transformation functions for nonrigid image registration. IEEE Trans. Image Process. 2006, 15, 529–538. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, J. Facet based differential registration of remote sensing images. In Proceedings of the International Geoscience and Remote Sensing Symposium, Sydney, NSW, Australia, 9–13 July 2001; pp. 712–714. [Google Scholar]
- Yu, L.; Zhang, D.; Holden, E. A fast and fully automatic registration approach based on point features for multi-source remote-sensing images. Comput. Geosci. 2008, 34, 838–848. [Google Scholar] [CrossRef]
- Arevalo, V.; Gonzalez, J. Improving piecewise linear registration of high-resolution satellite images through mesh optimization. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3792–3803. [Google Scholar] [CrossRef]
- Lin, X.; Zhang, Y.; Yang, Y. Application of Triangulation-Based Image Registration Method in the Remote Sensing Image Fusion. In Proceedings of the International Conference on Environmental Science and Information Application Technology, Wuhan, China, 4–5 July 2009; pp. 501–504. [Google Scholar]
- Xie, J.; Li, B.; Han, W.; Bao, J.; Gu, F.; Guo, F. A tiny facet primitive remote sensing image registration method based on SIFT key points. In Proceedings of the 2012 International Symposium on Instrumentation & Measurement, Sensor Network and Automation (IMSNA), Sanya, China, 25–28 August 2012; pp. 138–141. [Google Scholar]
- Han, Y.; Byun, Y.; Choi, J.; Han, D.; Kim, Y. Automatic registration of high-resolution images using local properties of features. Photogramm. Eng. Remote Sens. 2012, 78, 211–221. [Google Scholar] [CrossRef]
- Han, Y.; Choi, J.; Byun, Y.; Kim, Y. Parameter optimization for the extraction of matching points between high-resolution multisensor images in urban areas. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5612–5621. [Google Scholar] [CrossRef]
- Lee, D.T.; Schachter, B.J. Two algorithms for constructing a Delaunay triangulation. Internat. J. Comput. Inform. Sci. 1980, 9, 219–242. [Google Scholar] [CrossRef]
- Wu, J.; Cui, Z.; Sheng, V.S.; Zhao, P.; Su, D.; Gong, S. A comparative study of sift and its variants. Meas. Sci. Rev. 2013, 13, 123–131. [Google Scholar] [CrossRef] [Green Version]
- ASIFT: An Algorithm for Fully Affine Invariant Comparison. Available online: http://demo.ipol.im/demo/my_affine_sift/ (accessed on 13 March 2022).
- Yu, G.; Morel, J.M. ASIFT: An Algorithm for Fully Affine Invariant Comparison. Image Process. Line 2011, 1, 11–38. [Google Scholar] [CrossRef] [Green Version]
- CFOG. Available online: https://github.com/yeyuanxin110/CFOG (accessed on 13 March 2022).
- Fischler, M.A.; Bolles, R.C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Read. Comput. Vis. 1987, 24, 726–740. [Google Scholar] [CrossRef]
- Zhou, L.; Huang, D.; Li, C.; Zhou, D. Algorithm for gps network construction based on spherical delaunay triangulated irregular network. Xinan Jiaotong Daxue Xuebao J. Southwest Jiaotong Univ. 2007, 42, 380–383. [Google Scholar]
- Lawson, C.L. Software for C1 Surface Interpolation. In Proceedings of the Symposium Conducted by the Mathematics Research Center, the University of Wisconsin–Madison, Madison, WI, USA, 28–30 March 1977; pp. 161–194. [Google Scholar]
- Bowyer, A. Computing Dirichlet tessellations. Comput. J. 1981, 24, 162–166. [Google Scholar] [CrossRef] [Green Version]
- Robert, J.R. Algorithm 772: STRIPACK: Delaunay triangulation and Voronoi diagram on the surface of a sphere. ACM Trans. Math. Softw. 1997, 23, 416–434. [Google Scholar]
- DelaunayTriangulation. Available online: https://github.com/xialinbo/DelaunayTriangulation (accessed on 13 March 2022).
- Möbius, A.F. Der Barycentrische Calcul; Johann Ambrosius Barth: Leipzig, Germany, 1827. [Google Scholar]
- Möbius, A.F. Über Eine Neue Behandlungsweise der Analytischen Sphärik; Weidmann: Leipzig, Germany, 1846. [Google Scholar]
- Bronw, J.; Worsey, A. Problems with defining barycentric coordinates for the sphere. RAIRO Modélisation Mathématique Et Anal. Numérique 1992, 26, 37–49. [Google Scholar]
- Langer, T.; Belyaev, A.; Seidel, H.P. Spherical barycentric coordinates. In Proceedings of the 4th Eurographics Symposium on Geometry Processing (SGP ’06), Cagliari, Italy, 26–28 June 2006; pp. 81–88. [Google Scholar]
- Alfeld, P.; Neamtu, M.; Schumaker, L.L. Bernstein-Bézier polynomials on spheres and sphere-like surfaces. Comput. Aided Geom. Des. 1996, 13, 333–349. [Google Scholar] [CrossRef]
- Lei, K.; Qi, D.; Tian, X. A new coordinate system for constructing spherical grid systems. Appl. Sci. 2020, 10, 655. [Google Scholar] [CrossRef] [Green Version]
- Nozette, S.; Rustan, P.; Pleasance, L.P.; Kordas, J.F.; Lewis, I.T.; Park, H.S.; Priest, R.E. The Clementine Mission to the Moon: Scientific Overview. Science 1994, 266, 1835–1839. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- McEwen, A.S.; Robinson, M.S. Mapping of the Moon by Clementine. Adv. Space Res. 1997, 19, 1523–1533. [Google Scholar] [CrossRef]
- Lucey, P.G.; Blewett, D.T.; Taylor, G.J.; Hawke, B.R. Imaging of lunar surface maturity. J. Geophys. Res. 2000, 105, 20377–20386. [Google Scholar] [CrossRef]
- Moon Clementine UVVIS Warped Color Ratio Mosaic 200m v1. Available online: https://astrogeology.usgs.gov/search/map/Moon/Clementine/UVVIS/Lunar_Clementine_UVVIS_Warp_ClrRatio_Global_200m (accessed on 13 March 2022).
- Zhao, B.; Yang, J.; Wen, D.; Gao, W.; Ruan, P.; He, Y. Design and On-orbit Measurement of Chang’ E-1 Satellite CCD Stereo Camera. Spacecr. Eng. 2009, 18, 30–36. [Google Scholar]
- CE1_TMap_GDOM_120m. Available online: https://clpds.bao.ac.cn/ce5web/searchOrder_hyperSearchData.search?pid=CE1/CCD/level/DOM-120m (accessed on 13 March 2022).
- SLDEM2015. Available online: https://astrogeology.usgs.gov/search/map/Moon/LRO/LOLA/Lunar_LRO_LrocKaguya_DEMmerge_60N60S_512ppd (accessed on 13 March 2022).
- Ren, X.; Liu, J.; Li, C.; Li, H.; Yan, W.; Wang, F.; Wang, W.; Zhang, X.; Gao, X.; Chen, W. A global adjustment method for photogrammetric processing of Chang’E-2 stereo images. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6832–6843. [Google Scholar] [CrossRef]
- CE2TMap2015_DEM_20m. Available online: https://clpds.bao.ac.cn/ce5web/searchOrder_hyperSearchData.search?pid=CE2/CCD/level/DEM-20m (accessed on 13 March 2022).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment Group | Registration Status | MAE (m, pixel) | RMSE (m, pixel) |
|---|---|---|---|
| experiment 1 | before | 2225.0, 11.13 | 2442.2, 12.21 |
| after | 135.7, 0.68 | 198.3, 0.99 | |
| experiment 2 | before | 184.5, 3.08 | 106.5, 1.78 |
| after | 38.5, 0.64 | 43.0, 0.71 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bo, Z.; Di, K.; Liu, B.; Wang, J.; Liu, Z.; Xin, X.; Cheng, Z.; Yin, J. High-Precision Registration of Lunar Global Mapping Products Based on Spherical Triangular Mesh. Remote Sens. 2022, 14, 1442. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14061442
Bo Z, Di K, Liu B, Wang J, Liu Z, Xin X, Cheng Z, Yin J. High-Precision Registration of Lunar Global Mapping Products Based on Spherical Triangular Mesh. Remote Sensing. 2022; 14(6):1442. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14061442
Chicago/Turabian StyleBo, Zheng, Kaichang Di, Bin Liu, Jia Wang, Zhaoqin Liu, Xin Xin, Ziqing Cheng, and Jinkuan Yin. 2022. "High-Precision Registration of Lunar Global Mapping Products Based on Spherical Triangular Mesh" Remote Sensing 14, no. 6: 1442. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14061442