
Modeling Forest Canopy Cover: A Synergistic Use of Sentinel-2, Aerial Photogrammetry Data, and Machine Learning


 , , ,
, , ,  and
and
Abstract
:1. Introduction
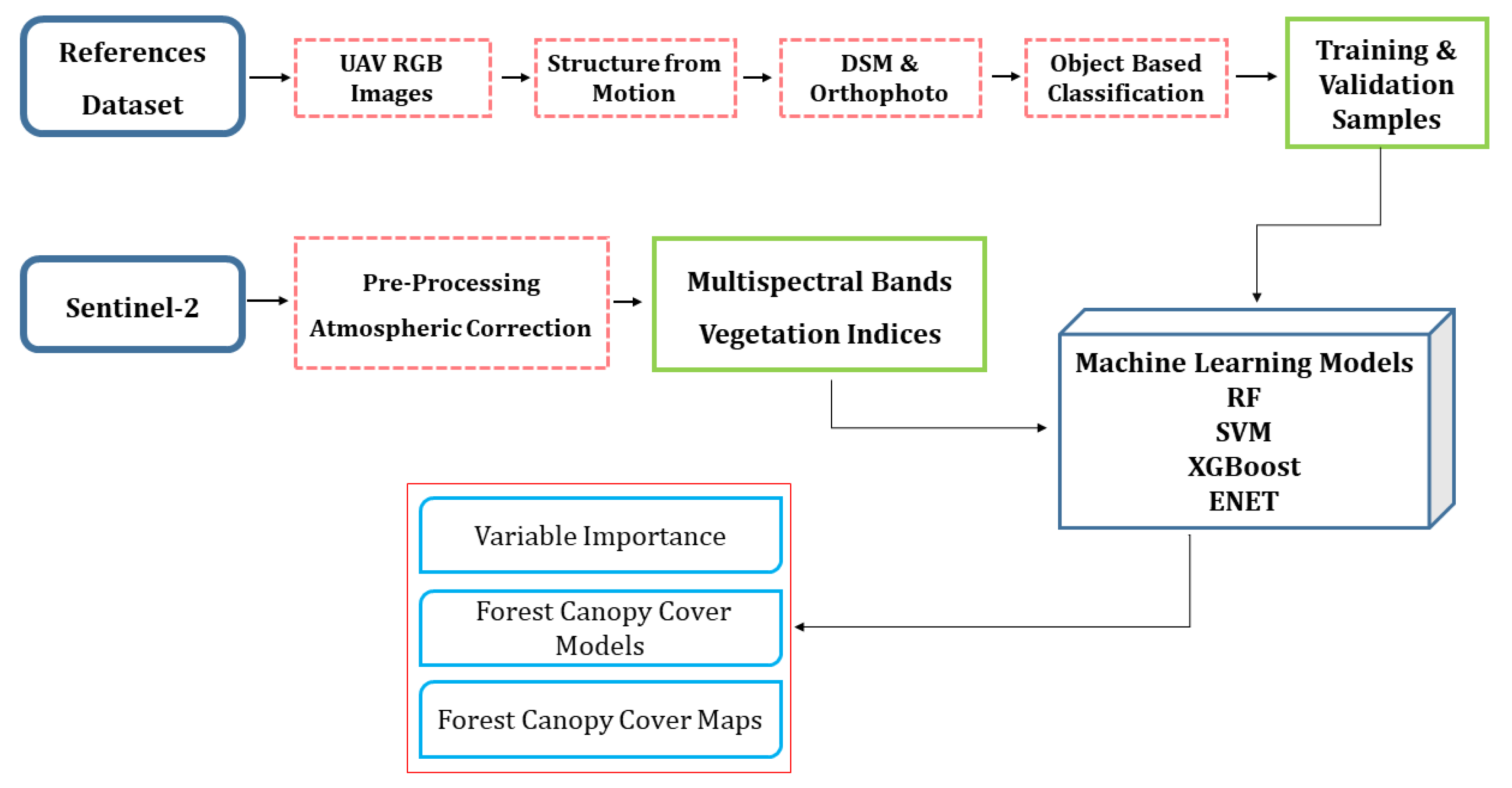
2. Materials and Methods
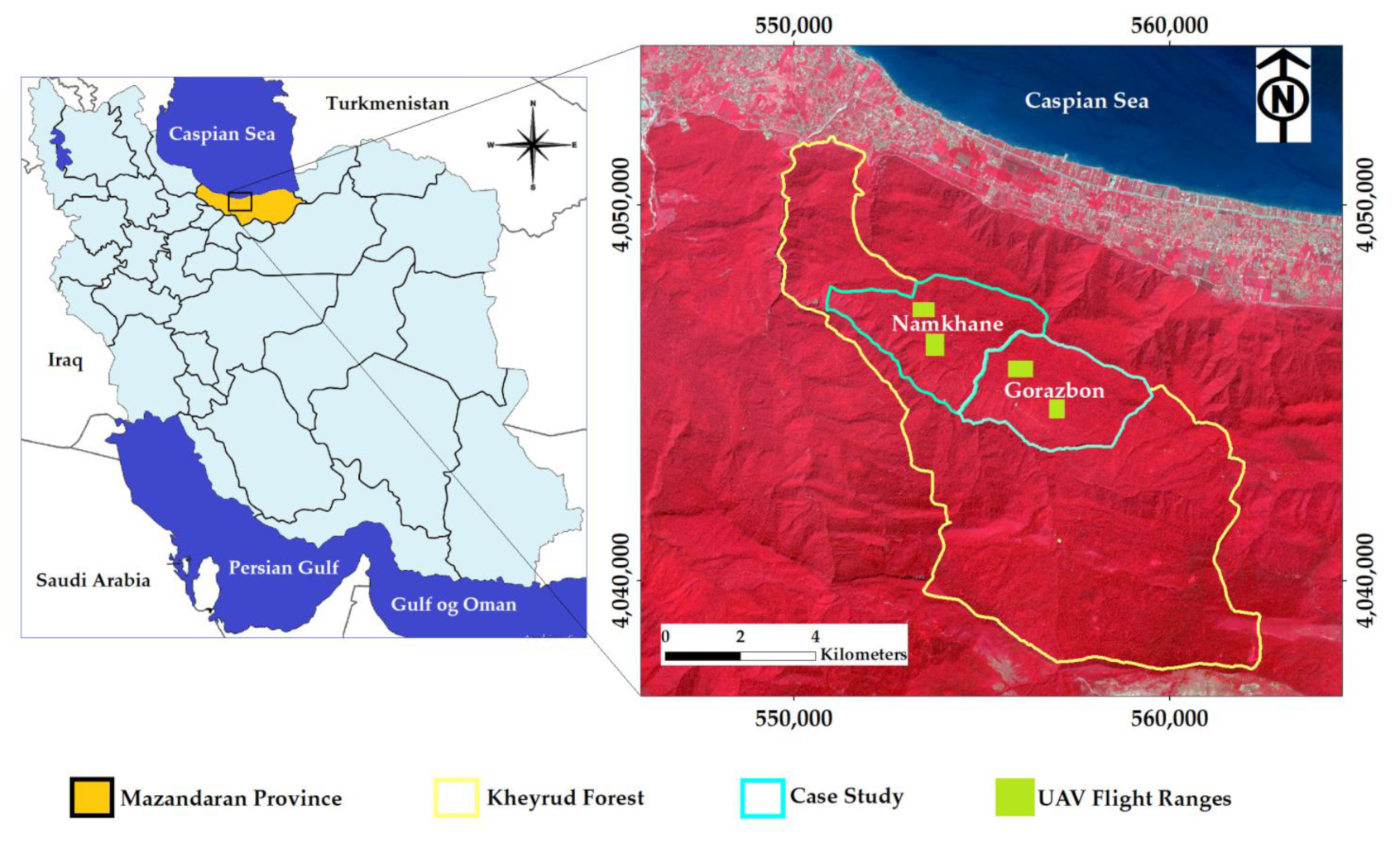
2.1. Study Area
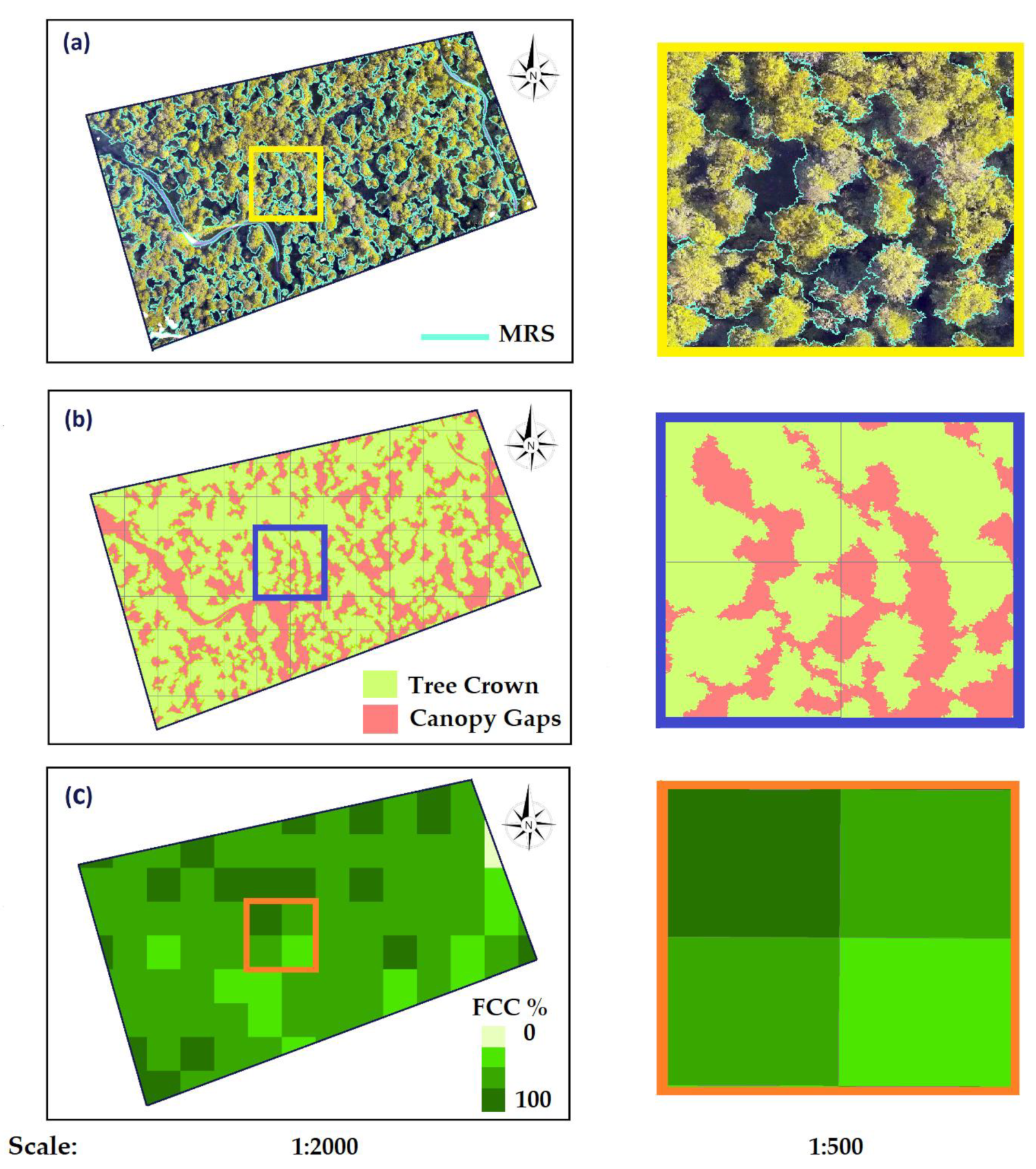
2.2. RGB Imagery Obtained via UAV Multispectral Camera
2.3. Reference Dataset
2.4. Processing of Sentinel-2 Imagery and Feature Extraction
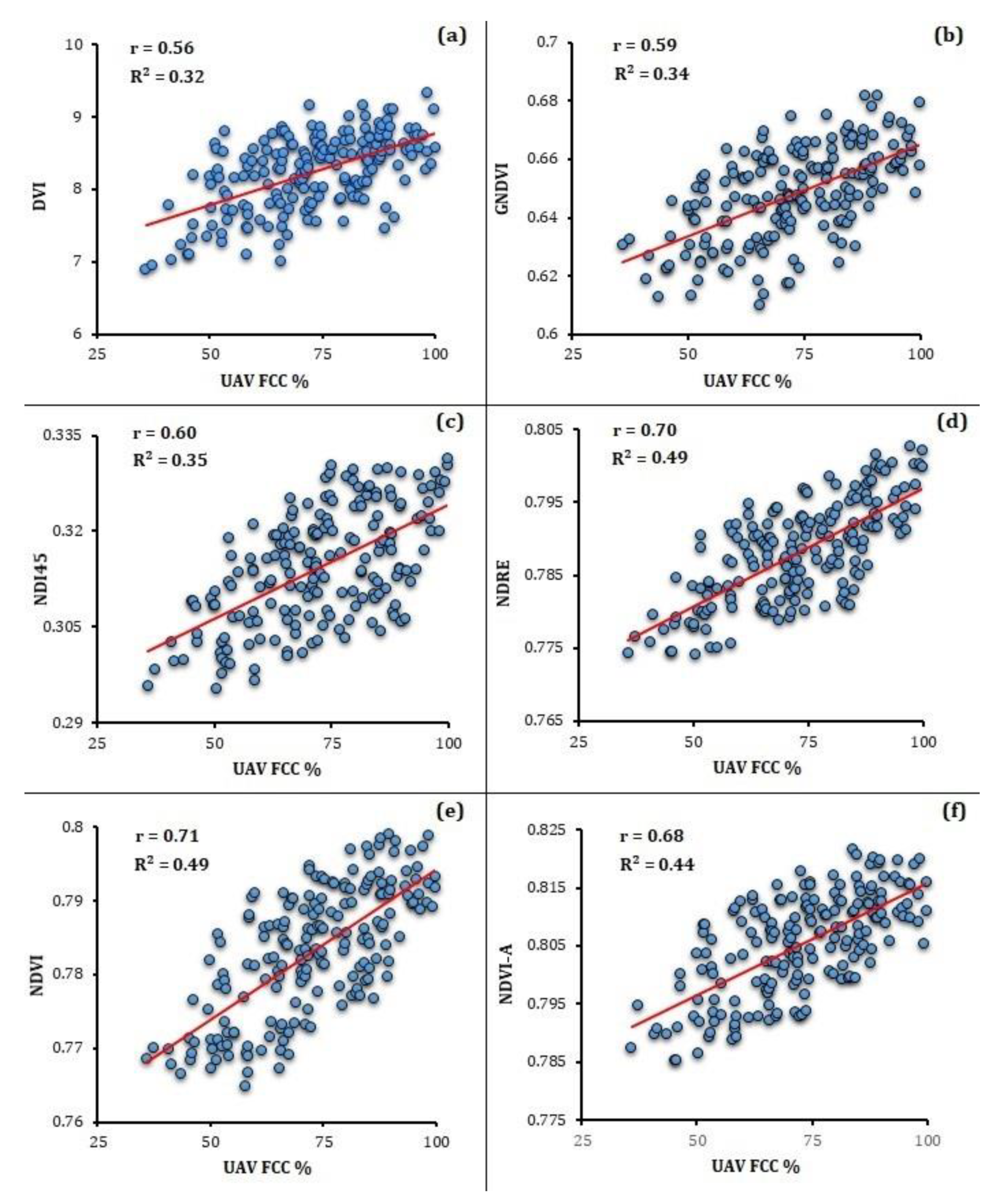
2.5. Relationship between FCC and Vegetation Indices
2.6. Model Building
2.6.1. Tuning Parameters
2.6.2. Random Forest
2.6.3. Support Vector Machine
2.6.4. Extreme Gradient Boosting
2.6.5. Elastic Net
3. Results
3.1. Relationships between FCC and Vegetation Indices
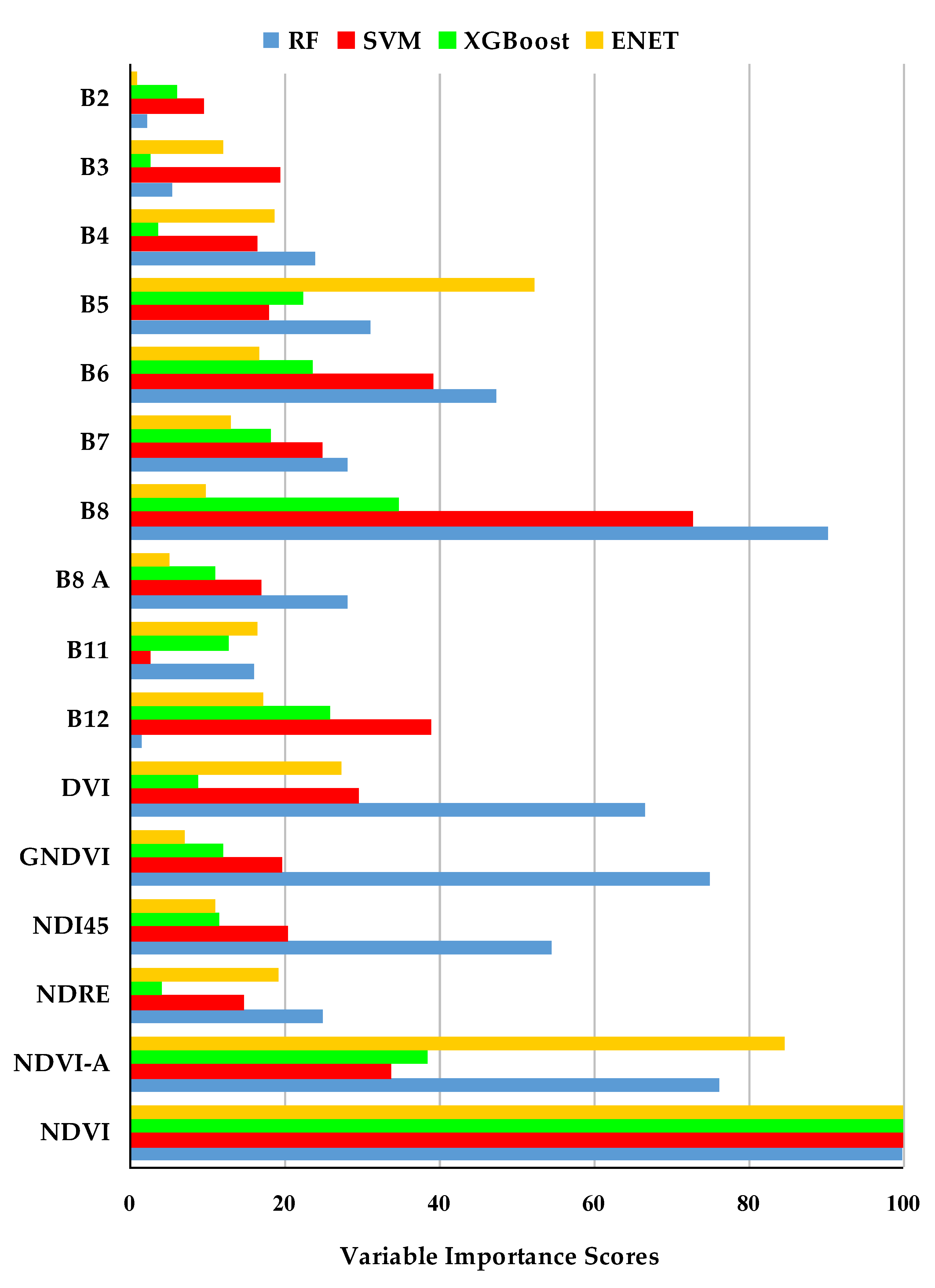
3.2. Variable Importance
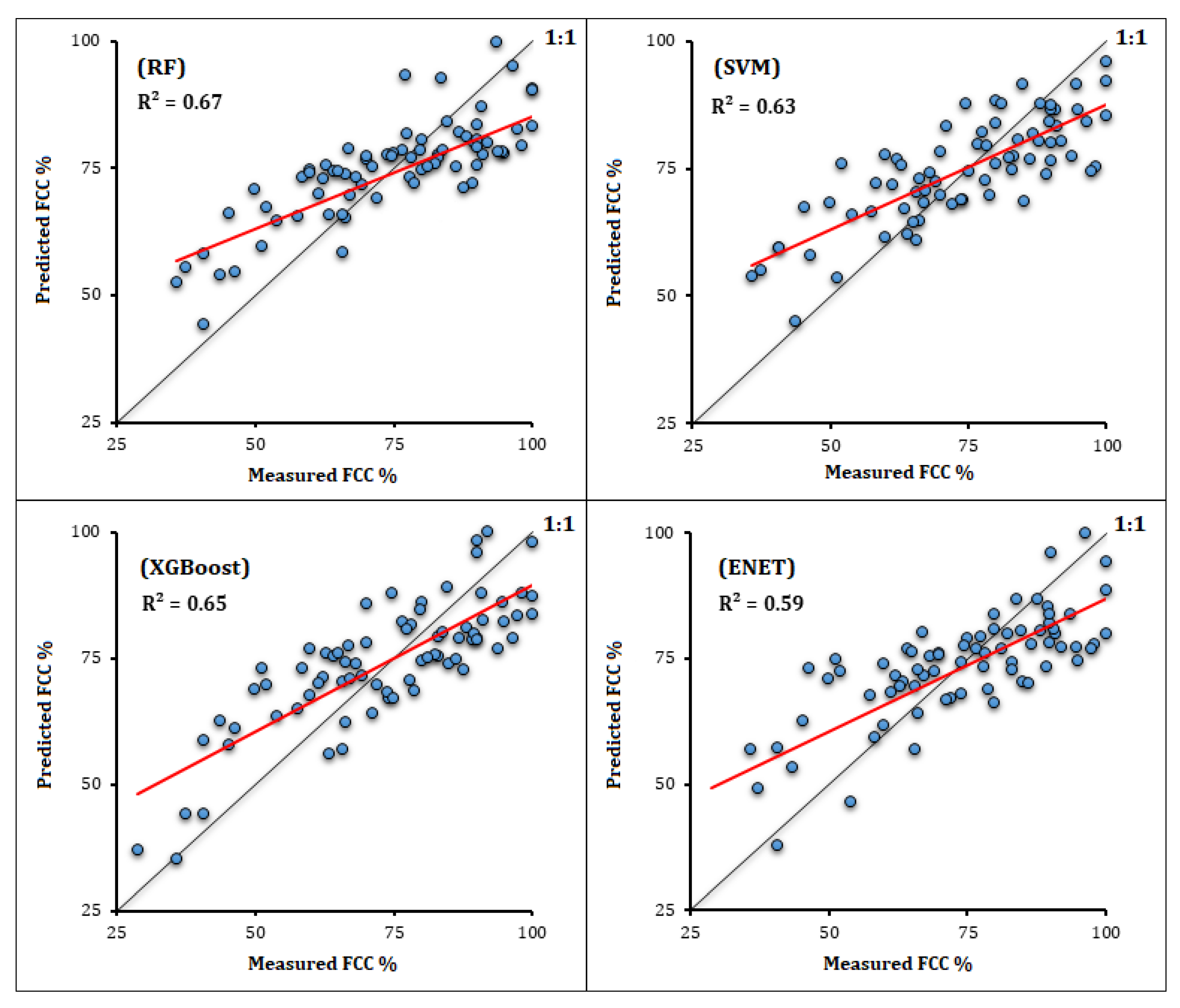
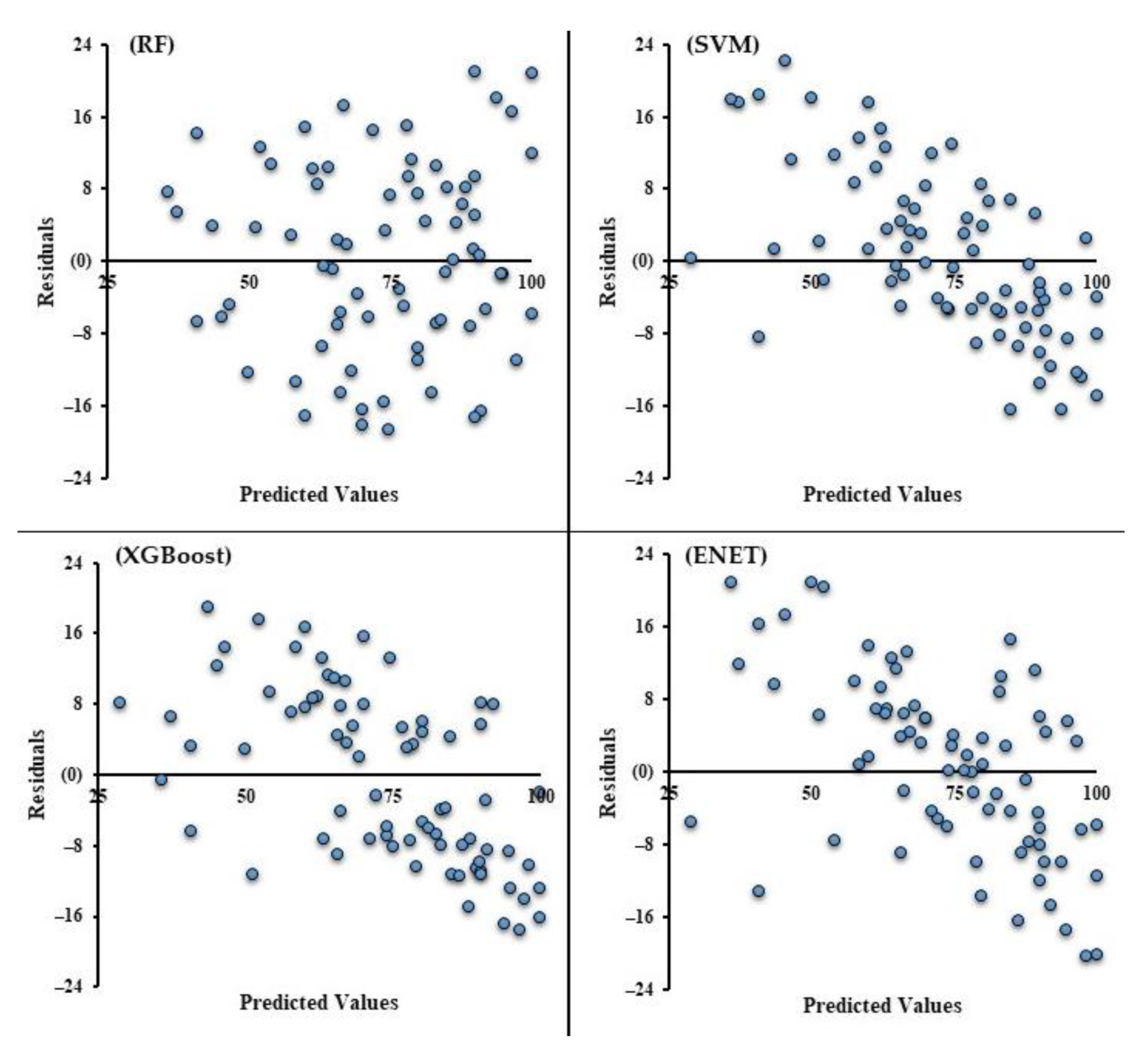
3.3. Comparison of ML Models
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Deljouei, A.; Sadeghi, S.M.M.; Abdi, E.; Bernhardt-Römermann, M.; Pascoe, E.L.; Marcantonio, M. The Impact of Road Disturbance on Vegetation and Soil Properties in a Beech Stand, Hyrcanian Forest. Eur. J. For. Res. 2018, 137, 759–770. [Google Scholar] [CrossRef]
- Pyngrope, O.R.; Kumar, M.; Pebam, R.; Singh, S.K.; Kundu, A.; Lal, D. Investigating Forest Fragmentation Through Earth Observation Datasets and Metric Analysis in the Tropical Rainforest Area. SN Appl. Sci. 2021, 3, 705. [Google Scholar] [CrossRef]
- Sadeghi, S.M.M.; Van Stan, J.T.; Pypker, T.G.; Tamjidi, J.; Friesen, J.; Farahnaklangroudi, M. Importance of Transitional Leaf States in Canopy Rainfall Partitioning Dynamics. Eur. J. For. Res. 2018, 137, 121–130. [Google Scholar] [CrossRef]
- Sadeghi, S.M.M.; Van Stan, J.T., II; Pypker, T.G.; Friesen, J. Canopy Hydrometeorological Dynamics Across a Chronosequence of A Globally Invasive Species, Ailanthus altissima (Mill., Tree of Heaven). Agric. For. Meteorol. 2017, 240, 10–17. [Google Scholar] [CrossRef]
- Korhonen, L.; Korhonen, K.T.; Rautiainen, M.; Stenberg, P.T. Estimation of Forest Canopy Cover: A Comparison of Field Measurement Techniques. Silva Fenn. 2006, 40, 577–588. [Google Scholar] [CrossRef] [Green Version]
- Gray, A.N.; McIntosh, A.C.; Garman, S.L.; Shettles, M.A. Predicting Canopy Cover of Diverse Forest Types from Individual Tree Measurements. For. Ecol. Manag. 2021, 501, 119682. [Google Scholar] [CrossRef]
- Imaizumi, F.; Nishii, R.; Ueno, K.; Kurobe, K. Forest Harvesting Impacts on Microclimate Conditions and Sediment Transport Activities in a Humid Periglacial Environment. Hydrol. Earth Syst. Sci. 2019, 23, 155–170. [Google Scholar] [CrossRef] [Green Version]
- Sadeghi, S.M.M.; Gordon, D.A.; Van Stan, J.T., II. A Global Synthesis of Throughfall and Stemflow Hydrometeorology. In Precipitation Partitioning by Vegetation; Springer: Cham, Switzerland, 2020; pp. 49–70. [Google Scholar]
- Chopping, M.; North, M.; Chen, J.Q.; Schaaf, C.B.; Blair, J.B.; Martonchik, J.V.; Bull, M.A. Forest Canopy Cover and Height from MISR in Topographically Complex Southwestern US Landscapes Assessed with High Quality Reference Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 44–58. [Google Scholar] [CrossRef]
- Senf, C.; Sebald, J.; Seidl, R. Increasing Canopy Mortality Affects the Future Demographic Structure of Europe’s Forests. One Earth 2021, 4, 749–755. [Google Scholar] [CrossRef]
- Feldmann, E.; Drobler, L.; Hauck, M.; Kucbel, S.; Pichler, V.; Leuschner, C. Canopy Gap Dynamics and Tree Understory Release in a Virgin Beech Forest, Slovakian Carpathians. For. Ecol. Manag. 2018, 415, 38–46. [Google Scholar] [CrossRef]
- Rose, K.M.; Friday, J.B.; Oliet, J.A.; Jacobs, D.F. Canopy Openness Affects Microclimate and Performance of Underplanted Trees in Restoration of High-Elevation Tropical Pasturelands. Agric. For. Meteorol. 2020, 292, 108105. [Google Scholar] [CrossRef]
- Seidel, D.; Leuschner, C.; Scherber, C.; Beyer, F.; Wommelsdorf, T.; Cashman, M.J.; Fehrmann, L. The Relationship between Tree Species Richness, Canopy Space Exploration and Productivity in a Temperate Broad-Leaf Mixed Forest. For. Ecol. Manag. 2013, 310, 366–374. [Google Scholar] [CrossRef]
- Dormann, C.F.; Bagnara, M.; Boch, S.; Hinderling, J.; Janeiro-Otero, A.; Schäfer, D.; Schall, P.; Hartig, F. Plant Species Richness Increases with Light Availability, but not Variability, in Temperate Forests Understory. BMC Ecol. 2020, 43, 7411. [Google Scholar]
- Nakamura, A.; Kitching, R.L.; Cao, M.; Creedy, T.J.; Fayle, T.M.; Freiberg, M.; Hewitt, C.N.; Itioka, T.; Pin, K.L.; Ma, K.; et al. Forests and Their Canopies: Achievements and Horizons in Canopy Science. Trends Ecol. Evol. 2017, 32, 438–451. [Google Scholar] [CrossRef] [Green Version]
- Gastón, A.; Blázquez-Cabrera, S.; Mateo-Sánchez, M.C.; Simón, M.A.; Saura, S. The Role of Forest Canopy Cover in Habitat Selection: Insights from the Iberian lynx. Eur. J. Wildl. Res. 2019, 65, 30. [Google Scholar] [CrossRef]
- Erdody, T.L.; Moskal, L.M. Fusion of LiDAR and Imagery for Estimating Forest Canopy Fuels. Remote Sens. Environ. 2010, 114, 725–737. [Google Scholar] [CrossRef]
- Palaiologou, P.; Kalabokidis, K.; Ager, A.A.; Day, M.A. Development of Comprehensive Fuel Management Strategies for Reducing Wildfire Risk in Greece. Forests 2020, 11, 789. [Google Scholar] [CrossRef]
- Gill, S.J.; Biging, G.S.; Murphy, E.C. Modeling Conifer Tree Crown Radius and Estimating Canopy Cover. For. Ecol. Manag. 2000, 126, 405–416. [Google Scholar] [CrossRef] [Green Version]
- Mcintosh, A.C.; Gray, A.; German, S.L. Estimating Canopy Cover from Standard Forest Inventory Measurements in Western Oregon. For. Sci. 2012, 58, 154–167. [Google Scholar] [CrossRef] [Green Version]
- Bianchi, S.; Cahalan, C.; Hale, S.; Gibbons, J.M. Rapid Assessment of Forest Canopy and Light Regime Using Smartphone Hemispherical Photography. Ecol. Evol. 2017, 24, 10556–10566. [Google Scholar] [CrossRef] [Green Version]
- Brumelis, G.; Dauskane, I.; Elferts, D.; Strode, L.; Krama, T.; Kramas, I. Estimates of Tree Canopy Closure and Basal Area as Proxies for Tree Crown Volume at a Stand Scale. Forests 2020, 11, 1180. [Google Scholar] [CrossRef]
- Khokthong, W.; Zemp, D.C.; Irawan, B.; Sundawati, L.; Kreft, H.; Holscher, D. Drone-Based Assessment of Canopy Cover for Analyzing Tree Mortality in an Oil Palm Agroforest. Front. Glob. Chang. 2019, 2, 12. [Google Scholar] [CrossRef] [Green Version]
- Eskandari, S.; Jaafari, M.R.; Oliva, P.; Ghorbanzadeh, O.; Blaschke, T. Mapping Land Cover and Tree Canopy Cover in Zagros Forests of Iran: Application of Sentinel-2, Google Earth, and Field Data. Remote Sens. 2020, 12, 1912. [Google Scholar] [CrossRef]
- Huang, X.; Wu, W.; Shen, T.; Xie, L.; Qin, Y.; Peng, S.; Zhou, X.; Fu, X.; Li, J.; Zhang, Z.; et al. Estimating Forest Canopy Cover by Multiscale Remote Sensing in Northeast Jiangxi, China. Land 2021, 10, 433. [Google Scholar] [CrossRef]
- Miranda, A.; Catalán, G.; Altamirano, A.; Zamorano-Elgueta, C.; Cavieres, M.; Guerra, J.; Mola-Yudego, B. How Much Can We See from a UAV-Mounted Regular Camera? Remote Sensing-Based Estimation of Forest Attributes in South American Native Forests. Remote Sens. 2021, 13, 2151. [Google Scholar] [CrossRef]
- Devaney, J.; Barret, B.; Barrett, F.; Redmond, J. Forest Cover Estimation in Ireland Using Radar Remote Sensing: A Comparative Analysis of Forest Cover Assessment Methodologies. PLoS ONE 2015, 10, e0133583. [Google Scholar] [CrossRef] [Green Version]
- Anchang, J.; Prihodko, L.; Ji, W.; Kumar, S.S.; Ross, C.W.; Yu, Q.; Lind, B.; Sarr, M.A.; Diouf, A.A.; Hanan, N.P. Toward Operational Mapping of Woody Canopy Cover in Tropical Savannas Using Google Earth Engine. Front. Environ. Sci. 2020, 30, 4. [Google Scholar] [CrossRef] [Green Version]
- Ma, Q.; Su, Y.; Guo, Q. Comparison of Canopy Cover Estimations from Airborne LiDAR, Aerial Imagery, and Satellite Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 99, 4225–4236. [Google Scholar] [CrossRef]
- Lima, T.A.; Beuchle, R.; Langner, A.; Grecchi, R.C.; Griess, V.C.; Achard, F. Comparing Sentinel-2 MSI and Landsat 8 OLI Imagery for Monitoring Selective Logging in the Brazilian Amazon. Remote Sens. 2019, 11, 961. [Google Scholar] [CrossRef] [Green Version]
- Cortés-Molino, A.; Maestro, I.A.; Fernandez-Luque, I.; Flores-Moya, A.; Carreira, J.A.; Tierra, A.E.S. Using ForeStereo and LIDAR Data to Assess Fire and Canopy Structure-Related Risks in Relict Abies pinsapo Boiss. PeerJ 2020, 8, e10158. [Google Scholar] [CrossRef]
- Bagaram, M.B.; Giuliarelli, D.; Chirici, G.; Giannetti, F.; Barbati, A. UAV Remote Sensing for Biodiversity Monitoring: Are Forest Canopy Gaps Good Covariates? Remote Sens. 2018, 10, 1397. [Google Scholar]
- Karlson, M.; Ostwald, M.; Reese, H.; Sanou, J.; Boalidioa, T.; Mattsson, E. Mapping Tree Canopy Cover and Aboveground Biomass in Sudano-Sahelian Woodlands Using Landsat 8 and Random Forest. Remote Sens. 2015, 7, 10017–10041. [Google Scholar] [CrossRef] [Green Version]
- Jin, D.; Qi, J.; Huang, H.; Li, L. Combining 3D Radiative Transfer Model and Convolutional Neural Network to Accurately Estimate Forest Canopy Cover from Very High-Resolution Satellite Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 10953–10963. [Google Scholar] [CrossRef]
- Ganz, S.; Adler, P.; Kandler, G. Forest Cover Mapping Based on a Combination of Aerial Images and Sentinel-2 Satellite Data Compared to National Forest Inventory Data. Forests 2020, 11, 1322. [Google Scholar] [CrossRef]
- Hua, Y.; Zhao, X. Multi-Model Estimation of Forest Canopy Closure by Using Red Edge Bands Based on Sentinel-2 Images. Forests 2021, 12, 1768. [Google Scholar] [CrossRef]
- Thanh Noi, P.; Kappas, M. Comparison of Random Forest, k-Nearest Neighbor, and Support Vector Machine Classifiers for Land Cover Classification Using Sentinel-2 Imagery. Sensors 2018, 18, 18. [Google Scholar] [CrossRef] [Green Version]
- Moradi, F.; Darvishsefat, A.A.; Pourrahmati, M.R.; Deljouei, A.; Borz, S.A. Estimating Aboveground Biomass in Dense Hyrcanian Forests by the Use of Sentinel-2 Data. Forests 2022, 13, 104. [Google Scholar] [CrossRef]
- Ali, A.M.; Darvishzadeh, R.; Skidmore, A.; Gara, T.W.; O’Connor, B.; Roeoesli, C.; Heurich, M.; Paganini, M. Comparing Methods for Mapping Canopy Chlorophyll Content in a Mixed Mountain Forest using Sentinel-2 Data. Int. J. Appl. Earth Obs. 2020, 87, 102037. [Google Scholar] [CrossRef]
- Su, M.; Guo, R.; Chen, B.; Hong, W.; Wang, J.; Feng, Y.; Xu, B. Sampling Strategy for Detailed Urban Land Use Classification: A Systematic Analysis in Shenzhen. Remote Sens. 2020, 12, 1497. [Google Scholar] [CrossRef]
- Bhandari, S.; Raheja, A.; Chaichi, M.R.; Green, R.L.; Do, D.; Ansari, M.; Pham, F.; Wolf, J.; Sherman, T.; Espinas, A. Ground-Truthing of UAV-Based Remote Sensing Data of Citrus Plants. In Proceedings of the Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping III, Orlando, FL, USA, 21 May 2018. [Google Scholar]
- Mazzia, V.; Comba, L.; Khaliq, A.; Chiaberge, M.; Gay, P. UAV and Machine Learning-Based Refinement of a Satellite-Driven Vegetation Index for Precision Agriculture. Sensors 2020, 20, 2530. [Google Scholar] [CrossRef]
- Nasiri, V.; Darvishsefat, A.A.; Arefi, H.; Pierrot-Deseilligny, M.; Namiranian, M.; Le-Bris, A. Unmanned Aerial Vehicles (UAV) Based Canopy Height Modeling Under Leaf-On and Leaf-Off Conditions for Determining Tree Height and Crown Diameter (Case Study: Hyrcanian Mixed Forest). Can. J. For. Res. 2021, 51, 962–971. [Google Scholar] [CrossRef]
- Torresan, C.; Carotenuto, F.; Chiavetta, U.; Miglietta, F.; Zaldei, A.; Gioli, B. Individual Tree Crown Segmentation in Two-Layered Dense Mixed Forests from UAV LiDAR Data. Drones 2020, 4, 10. [Google Scholar] [CrossRef] [Green Version]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef] [Green Version]
- Deljouei, A.; Abdi, E.; Schwarz, M.; Majnounian, B.; Sohrabi, H.; Dumroese, R.K. Mechanical Characteristics of the Fine Roots of Two Broadleaved Tree Species from the Temperate Caspian Hyrcanian Ecoregion. Forests 2020, 11, 345. [Google Scholar] [CrossRef] [Green Version]
- WHC. UNESCO World Heritage Centre. 2021. Available online: https://whc.unesco.org/en/list/1584 (accessed on 17 December 2021).
- Marvi Mohadjer, M.R. Silviculture; University of Tehran Press: Tehran, Iran, 2012; p. 387. [Google Scholar]
- Mészarós, J. Aerial Surveying UAV Based on Open-Source Hardware and Software. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 37, 555. [Google Scholar] [CrossRef] [Green Version]
- eCognition. Trimble Geospatial. Available online: https://geospatial.trimble.com/products-and-solutions/ecognition (accessed on 17 December 2020).
- Main-Knorn, M.; Pflug, B.; Louis, J.; Debaecker, V.; Muller-Wilm, U.; Gascon, F. Sen2Cor for Sentinel-2. Proc. SPIE 2017, 10427, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Raiyani, K.; Gonçalves, T.; Rato, L.; Salgueiro, P.; Marques da Silva, J.R. Sentinel-2 Image Scene Classification: A Comparison Between Sen2Cor and a Machine Learning Approach. Remote Sens. 2021, 13, 300. [Google Scholar] [CrossRef]
- STEP Science Toolbox Exploitation Platform (SNAP). Available online: http://step.esa.int/main/toolboxes/snap (accessed on 17 December 2020).
- Zhao, L.; Dai, A.; Dong, B. Changes in Global Vegetation Activity and its Driving Factors during 1982–2013. Agric. For. Meteorol. 2018, 249, 198–209. [Google Scholar] [CrossRef]
- Qi, H.; Chehbouni, A.; Huete, A.R.; Kerr, Y.H.; Sorooshian, S. A Modified Soil Adjusted Vegetation Index. Remote Sens. Environ. 1994, 48, 119–126. [Google Scholar] [CrossRef]
- Guyot, G.; Baret, F. Spectral Signatures of Objects in Remote Sensing. In Proceedings of the International Colloquium Spectral Signatures of Objects in Remote Sensing, Aussois Modane, France, 18–22 January 1988. [Google Scholar]
- Berrar, D. Cross Validation. J. Bioinform. Comput. Biol. 2018, 1, 542–545. [Google Scholar]
- Karadal, C.H.; Kaya, M.C.; Tuncer, T.; Dogan, S.; Acharya, U.R. Automated Classification of Remote Sensing Images Using Multileveled MobileNetV2 and DWT Techniques. Expert Syst. Appl. 2021, 185, 115659. [Google Scholar] [CrossRef]
- Ramezan, C.A.; Warner, T.A.; Maxwell, A.E. Evaluation of Sampling and Cross-Validation Tuning Strategies for Regional-Scale Machine Learning Classification. Remote Sens. 2019, 11, 185. [Google Scholar] [CrossRef] [Green Version]
- Kuhn, M. Building Predictive Models in R Using the Caret Package. J. Stat. Softw. 2008, 28, 1–26. [Google Scholar] [CrossRef] [Green Version]
- Pilaš, I.; Gašparović, M.; Novkinić, A.; Klobučar, D. Mapping of the Canopy Openings in Mixed Beech–Fir Forest at Sentinel-2 Subpixel Level Using UAV and Machine Learning Approach. Remote Sens. 2020, 12, 3925. [Google Scholar] [CrossRef]
- He, M.; Xu, Y.; Li, N. Population Spatialization in Beijing City Based on Machine Learning and Multisource Remote Sensing Data. Remote Sens. 2020, 12, 1910. [Google Scholar] [CrossRef]
- Ghatkar, J.G.; Singh, R.K.; Shanmugam, P. Classification of Algal Bloom Species from Remote Sensing Data Using an Extreme Gradient Boosted Decision Tree Model. Int. J. Remote Sens. 2019, 40, 9412–9438. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Misra, S.; Li, H.; He, J. Machine Learning for Subsurface Characterization; Gulf Professional Publishing: Cambridge, MA, USA, 2019. [Google Scholar]
- Gomroki, M.; Jafari, M.; Sadeghian, S.; Azizi, Z. Application of Intelligent Interpolation Methods for DTM Generation of Forest Areas based on Lidar Data. J. Photogramm. Remote Sensi. Geoinform. Sci. 2017, 85, 227–241. [Google Scholar] [CrossRef]
- Ballanti, L.; Blesius, L.; Hines, E.; Kruse, B. Tree Species Classification Using Hyperspectral Imagery: A Comparison of Two Classifiers. Remote Sens. 2016, 8, 445. [Google Scholar] [CrossRef] [Green Version]
- Wang, M.; Wan, Y.; Ye, Z.; Lai, X. Remote Sensing Image Classification Based on the Optimal Support Vector Machine and Modified Binary Coded ant Colony Optimization Algorithm. Inf. Sci. 2017, 402, 50–68. [Google Scholar] [CrossRef]
- Evgeniou, T.; Pontil, M. Support Vector Machines: Theory and Applications. In Advanced Course on Artificial Intelligence (ACAI); Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Chen, T.; Guestrin, C. XGBoost: A Scalable Tree Boosting System. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data, San Francisco, CA, USA, 13–17 August 2016. [Google Scholar]
- Bentejac, C.; Csorgo, A.; Martinez-Munoz, G. A Comparative Analysis of Gradient Boosting Algorithms. Artif. Intell. Rev. 2021, 54, 1937–1967. [Google Scholar] [CrossRef]
- Su, H.; Yang, X.; Lu, W.; Yan, X.H. Estimating Subsurface Thermohaline Structure of the Global Ocean Using Surface Remote Sensing Observations. Remote Sens. 2019, 11, 1598. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Yang, R.; Ye, Y.; Yuan, Z.; Wang, D.; Hua, K. Winter wheat SPAD Estimation from UAV Hyperspectral Data Using Cluster-Regression Methods. Int. J. Appl. Earth Obs. Geoinf. 2021, 105, 102618. [Google Scholar] [CrossRef]
- Zou, H.; Hastie, T. Regularization and Variable Selection via the Elastic Net. J. R. Stat. Soc. 2005, 67, 301–320. [Google Scholar] [CrossRef] [Green Version]
- Hong, Y.; Chen, Y.; Yu, L.; Liu, Y.; Liu, Y.; Zhang, Y.; Liu, Y.; Cheng, H. Combining Fractional Order Derivative and Spectral Variable Selection for Organic Matter Estimation of Homogeneous Soil Samples by VIS–NIR Spectroscopy. Remote Sens. 2018, 10, 479. [Google Scholar] [CrossRef] [Green Version]
- El Anbari, E.M.; Mkhadri, A. Penalized Regression with a Combination of the L1 Norm and the Correlation-Based Penalty. Ph.D. Thesis, The National Institute for Research in Digital Science and Technology (INRIA), Le Chesnay-Rocquencourt, France, 2009. [Google Scholar]
- Zhao, Y.L.; Feng, Y.L. Learning Performance of Elastic-Net Regularization. Math. Comput. Model. 2013, 57, 1395–1407. [Google Scholar] [CrossRef]
- Kim, K.; Koo, J.; Sun, H. An Empirical Threshold of Selection Probability for Analysis of High-Dimensional Correlated Data. J. Stat. Comput. Simul. 2020, 90, 1606–1617. [Google Scholar] [CrossRef]
- Zhi-Hui, M.; Lei, D.; Fu-Zhou, D.; Xiao-Juan, L.; Dan-Yu, Q. Angle Effects of Vegetation Indices and the Influence on Prediction of SPAD Values in Soybean and Maize. Int. J. Appl. Earth. Obs. 2020, 94, 102198. [Google Scholar]
- Tsalyuk, M.; Kelly, M.; Getz, W.M. Improving the Prediction of African Savanna Vegetation Variables Using Time Series of MODIS Products. ISPRS J. Photogramm. Remote Sens. 2017, 131, 77–91. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Wang, T.; Darvishzadeh, R.; Skidmore, A.; Jones, S.; Suarez, L.; Woodgate, W.; Heiden, U.; Heurich, M.; Hearne, J. Vegetation Indices for Mapping Canopy Foliar Nitrogen in a Mixed Temperate Forest. Remote Sens. 2016, 8, 491. [Google Scholar] [CrossRef] [Green Version]
- Zimmermann, S.; Hoffmann, K. Evaluating the Capabilities of Sentinel-2 Data for Large-Area Detection of Bark Beetle Infestation in the Central German Uplands. J. Appl. Remote. Sens. 2020, 14, 24515. [Google Scholar] [CrossRef]
- Halperin, J.; Lemay, V.; Chidumayo, E.; Verchot, L.; Marshall, P. Model-Based Estimation of Above-Ground Biomass in the Miombo Ecoregion of Zambia. For. Ecosyst. 2016, 3, 14. [Google Scholar] [CrossRef] [Green Version]
- Hegarty-Craver, M.; Polly, J.; O’Neil, M.; Ujeneza, N.; Rineer, J.; Beach, R.H.; Lapidus, D.; Temple, D. Remote Crop Mapping at Scale: Using Satellite Imagery and UAV-Acquired Data as Ground Truth. Remote Sens. 2020, 12, 1984. [Google Scholar] [CrossRef]
- Wang, J.; Xiao, X.; Bajgain, R.; Starks, P.; Steiner, J.; Doughty, R.B.; Chang, Q. Estimating Leaf Area Index and Aboveground Biomass of Grazing Pastures Using Sentinel-1, Sentinel-2 and Landsat Images. ISPRS J. Photogramm. Remote Sens. 2019, 154, 189–201. [Google Scholar] [CrossRef] [Green Version]
- Davies, S.J.; Abiem, I.; Salim, K.A.; Aguilar, S.; Allen, D.; Alonso, A.; Anderson-Teixeira, K.; Andrade, A.; Arellano, G.; Ashton, P.S.; et al. ForestGEO: Understanding Forest Diversity and Dynamics Through a Global Observatory Network. Biol. Conserv. 2021, 253, 108907. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Information | UAV Mission | |||
|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |
| Area (ha) | 20 | 15 | 17 | 19 |
| Flight Altitude (m) | 100 | 100 | 100 | 100 |
| Number of Images | 276 | 170 | 193 | 260 |
| Aligned Images | 260 | 158 | 170 | 257 |
| Side and Forward Overlap (%) | 80 | 80 | 80 | 80 |
| Number of GCPs | 4 | 4 | 4 | 4 |
| Georeferencing Errors | ||||
| X Error (cm) | 2.2 | 3.6 | 1.9 | 1.3 |
| Y Error (cm) | 0.8 | 2.1 | 1.8 | 0.7 |
| Z Error (cm) | 0.4 | 2.6 | 1.2 | 1.3 |
| Total Error (cm) | 1.4 | 2.1 | 2.2 | 1.8 |
| GNSS Measurement Errors | ||||
| Number of GCPs | 4 | 4 | 4 | 4 |
| Minimum of XY Error (cm) | 11.1 | 8.4 | 5.5 | 9.7 |
| Maximum of XY Error (cm) | 13.1 | 11.5 | 8.4 | 12.2 |
| Minimum of Z Error (cm) | 10.6 | 9.9 | 9.1 | 10.6 |
| Maximum of Z Error (cm) | 17.2 | 12.5 | 9.7 | 14.5 |
| Processing Step | Parameter Name | Parameter Value |
|---|---|---|
| Aligning Images | Accuracy | Highest |
| Optimization of Image Alignment | Default | f, b1, b2, cx, cy, k1, k2, p1, and p2 |
| The Ground Control Point Placement | Manual | |
| Building Dense Points | Quality | High |
| Mesh Building | Surface type | Height field |
| Source data | Dense points | |
| Face count | High | |
| Orthomosaic | Blending mode | Mosaic |
| Coordinate system | WGS 84/UTM |
| Characteristics | Technical Specifications |
|---|---|
| Diagonal Wheelbase | 105 cm |
| Size of Propeller | 38 cm |
| Length of One Arm | 42 cm |
| Net Weight | 2.25 kg |
| Battery | (2×) 6S, 16,000 mHA |
| Navigation | Manual/automatic |
| Communication | Antenna tracking systems |
| Resolution of RGB Camera | 12 megapixel |
| Resolution of IR Camera | 12 megapixel |
| Practical Range | 4 km |
| Operational Altitude | 50 to 300 m |
| Takeoff Weight | 10 kg |
| Total Weight | 9 kg |
| Flight Duration | 30 min |
| Vegetation Index | Spectral Bands | Sentinel-2 Formula | References |
|---|---|---|---|
| DVI | Red, NIR | B8/B4 | [54,55,56] |
| NDVI | Red, NIR | B8-B4/B8 + B4 | |
| NDVI2 | Red, NIR | B8a-B4/B8 A + B4 | |
| GNDVI | Green, NIR | B8-B3/B8 + B3 | |
| NDI45 | Red, red edge | B5-B4/B5 + B4 | |
| NDRE | Red edge, NIR | B8-B5/B8 + B5 |
| Vegetation Indices | DVI | GNDVI | NDI45 | NDRE | NDVI | NDVI-A |
|---|---|---|---|---|---|---|
| Pearson Correlation (r) | 0.56 | 0.59 | 0.60 | 0.70 | 0.71 | 0.68 |
| Coefficient of Determination (R2) | 0.32 | 0.34 | 0.35 | 0.49 | 0.49 | 0.44 |
| Algorithm | R2 | RMSE (%) | MAE (%) | Tuning Parameters |
|---|---|---|---|---|
| RF | 0.67 | 18.87 | 15.35 | mtry = 9; ntree = 1000 |
| SVM | 0.63 | 19.24 | 15.55 | C = 1; Sigma = 0.0950 |
| XGBoost | 0.65 | 19.05 | 15.45 | nrounds = 50; max_depth = 3; eta = 0.3; Gamma = 0; colsample_bytree = 0.8 |
| ENET | 0.59 | 20.04 | 16.44 | Alpha = 0.4; Lambda = 0.04 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nasiri, V.; Darvishsefat, A.A.; Arefi, H.; Griess, V.C.; Sadeghi, S.M.M.; Borz, S.A. Modeling Forest Canopy Cover: A Synergistic Use of Sentinel-2, Aerial Photogrammetry Data, and Machine Learning. Remote Sens. 2022, 14, 1453. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14061453
Nasiri V, Darvishsefat AA, Arefi H, Griess VC, Sadeghi SMM, Borz SA. Modeling Forest Canopy Cover: A Synergistic Use of Sentinel-2, Aerial Photogrammetry Data, and Machine Learning. Remote Sensing. 2022; 14(6):1453. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14061453
Chicago/Turabian StyleNasiri, Vahid, Ali Asghar Darvishsefat, Hossein Arefi, Verena C. Griess, Seyed Mohammad Moein Sadeghi, and Stelian Alexandru Borz. 2022. "Modeling Forest Canopy Cover: A Synergistic Use of Sentinel-2, Aerial Photogrammetry Data, and Machine Learning" Remote Sensing 14, no. 6: 1453. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14061453