
A Machine Learning Approach to Waterbody Segmentation in Thermal Infrared Imagery in Support of Tactical Wildfire Mapping

 , , and
, , and
Abstract
:1. Introduction
- (i)
- Evaluate various methods for waterbody segmentation in thermal IR imagery collected over areas of varying terrain with and without the presence of flaming and smouldering combustion;
- (ii)
- Compare segmentation method outputs and existing publicly available static GIS waterbody boundary layers against reference data created from the aerial images and discuss the implications.
2. Materials and Methods
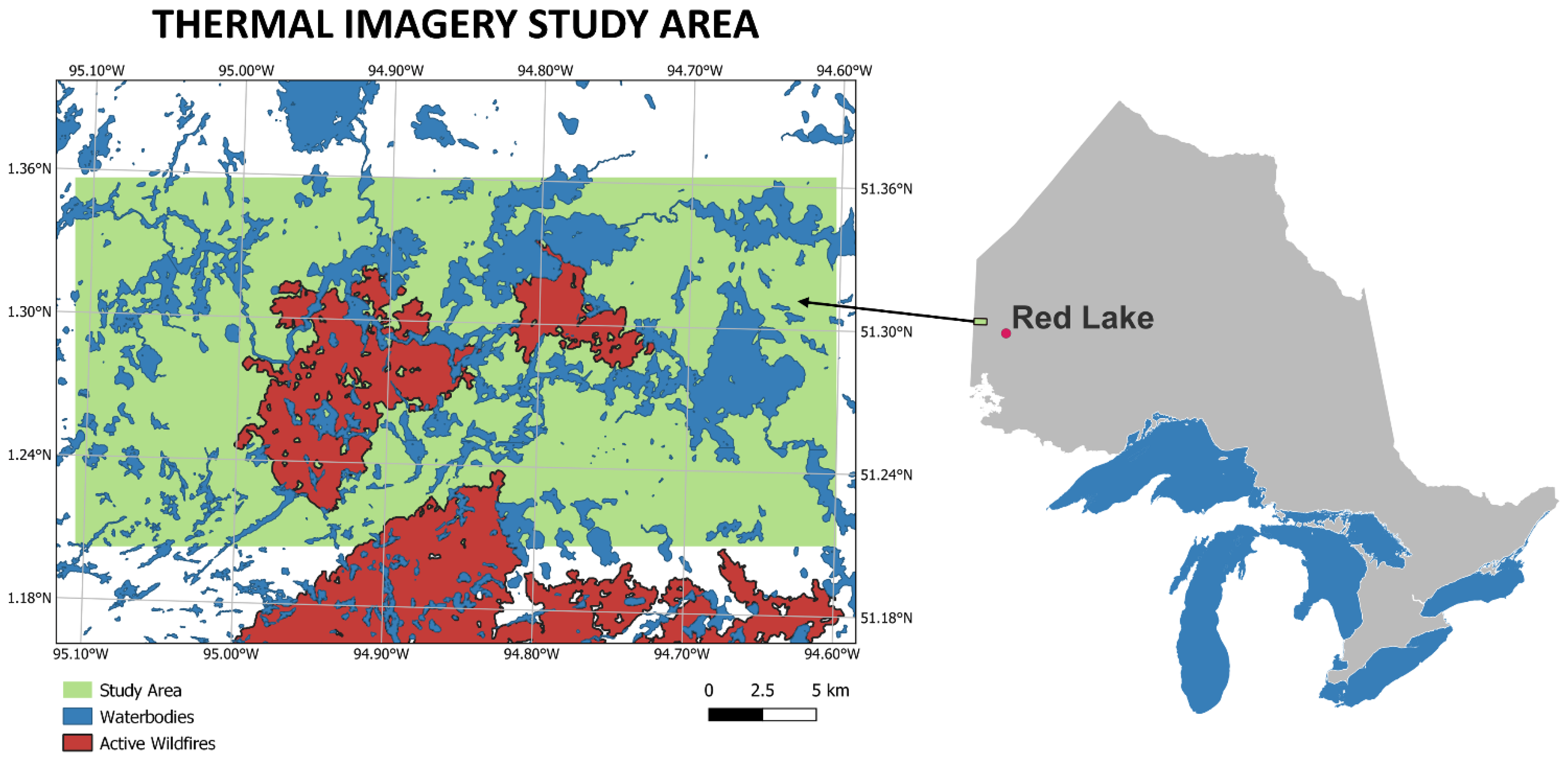
2.1. Study Area
2.2. Methodology
2.2.1. Airborne Imagery
2.2.2. Ancillary Data
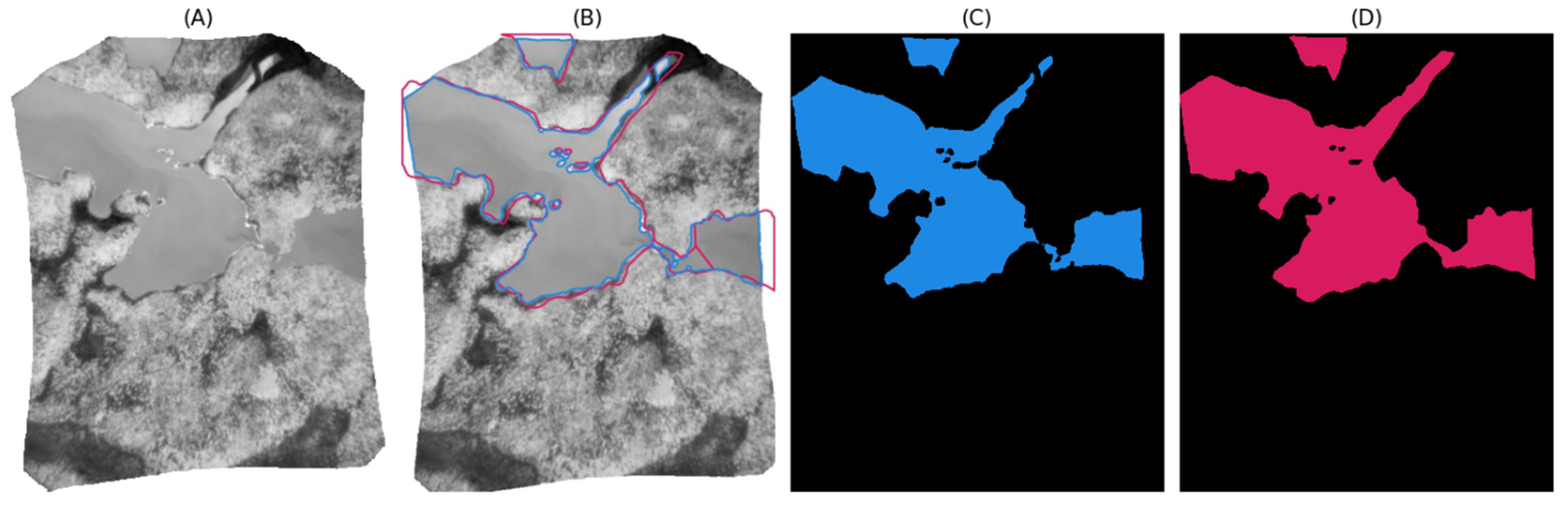
2.2.3. Training and Validation Reference Data
2.3. Classifier Feature Identification
2.4. Waterbody Segmentation Methods
2.4.1. Static GIS Data Segmentation
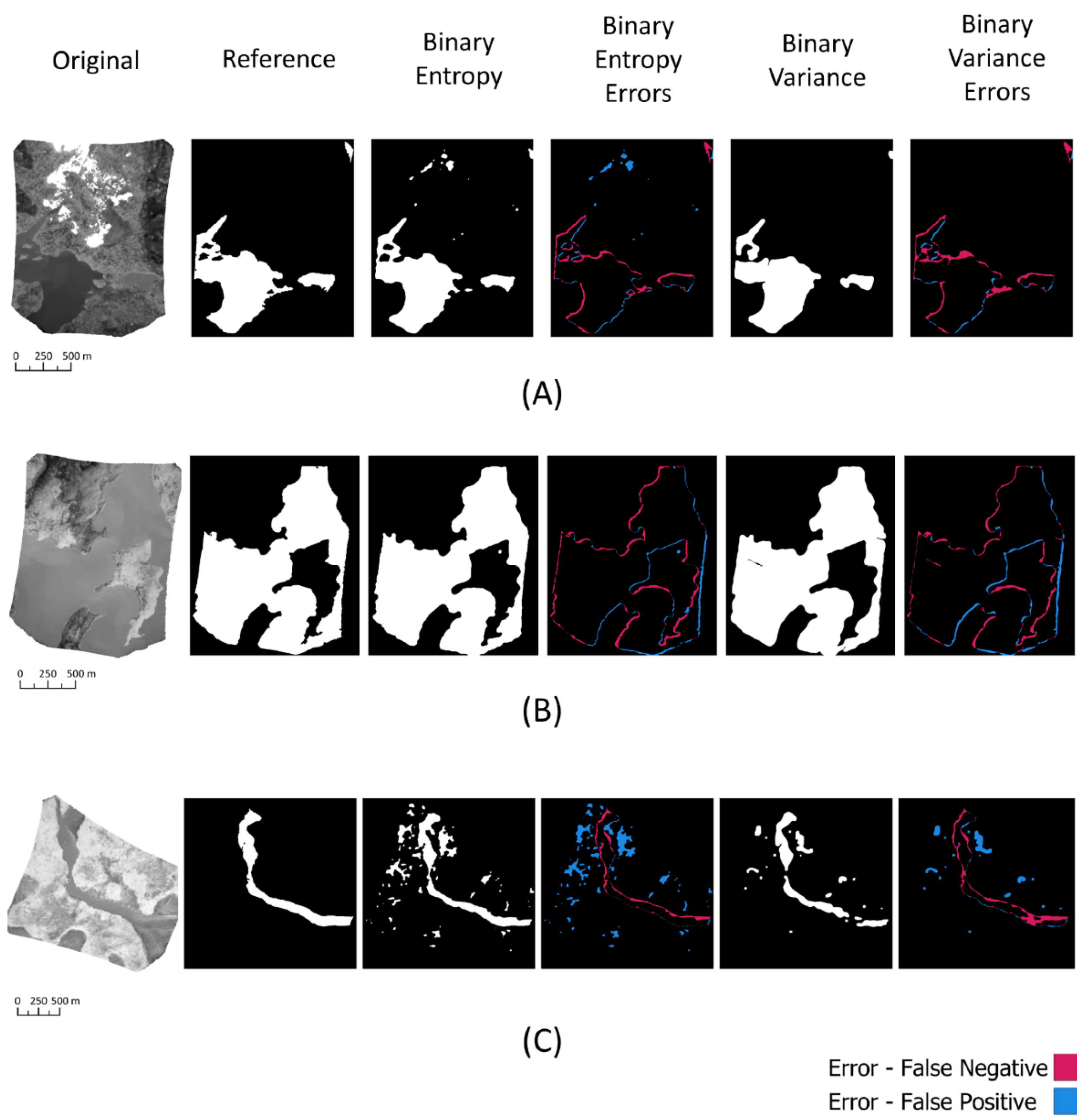
2.4.2. Unsupervised Techniques: Binary Entropy and Binary Variance Filter Combinations
2.4.3. Baseline Random Forest Classifier
2.4.4. Random Forest Classifier with Feature Selection
2.5. Waterbody Segmentation Method Evaluation
3. Results
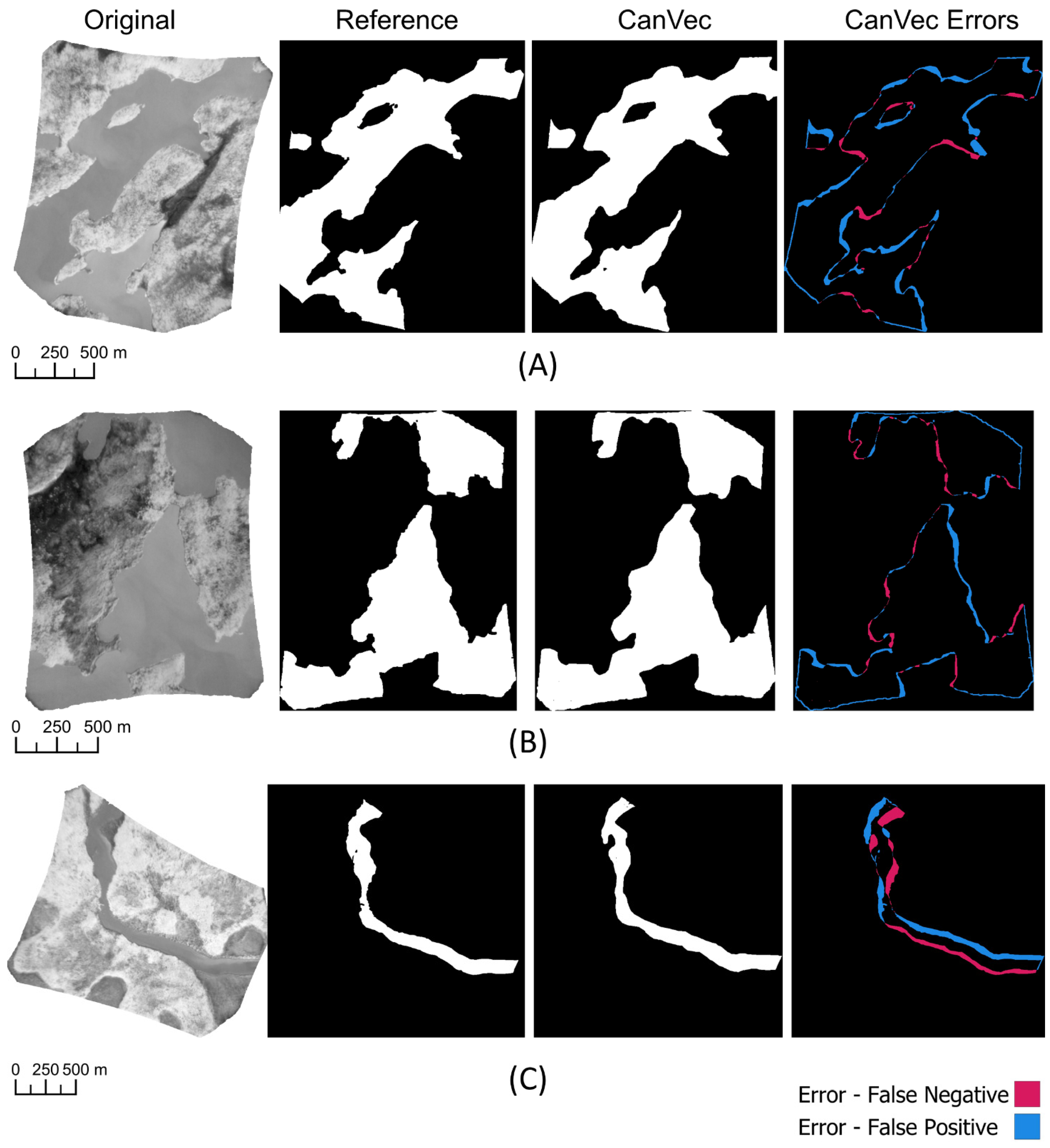
3.1. Baseline Static GIS Metrics Results
3.2. Unsupervised Technique Results
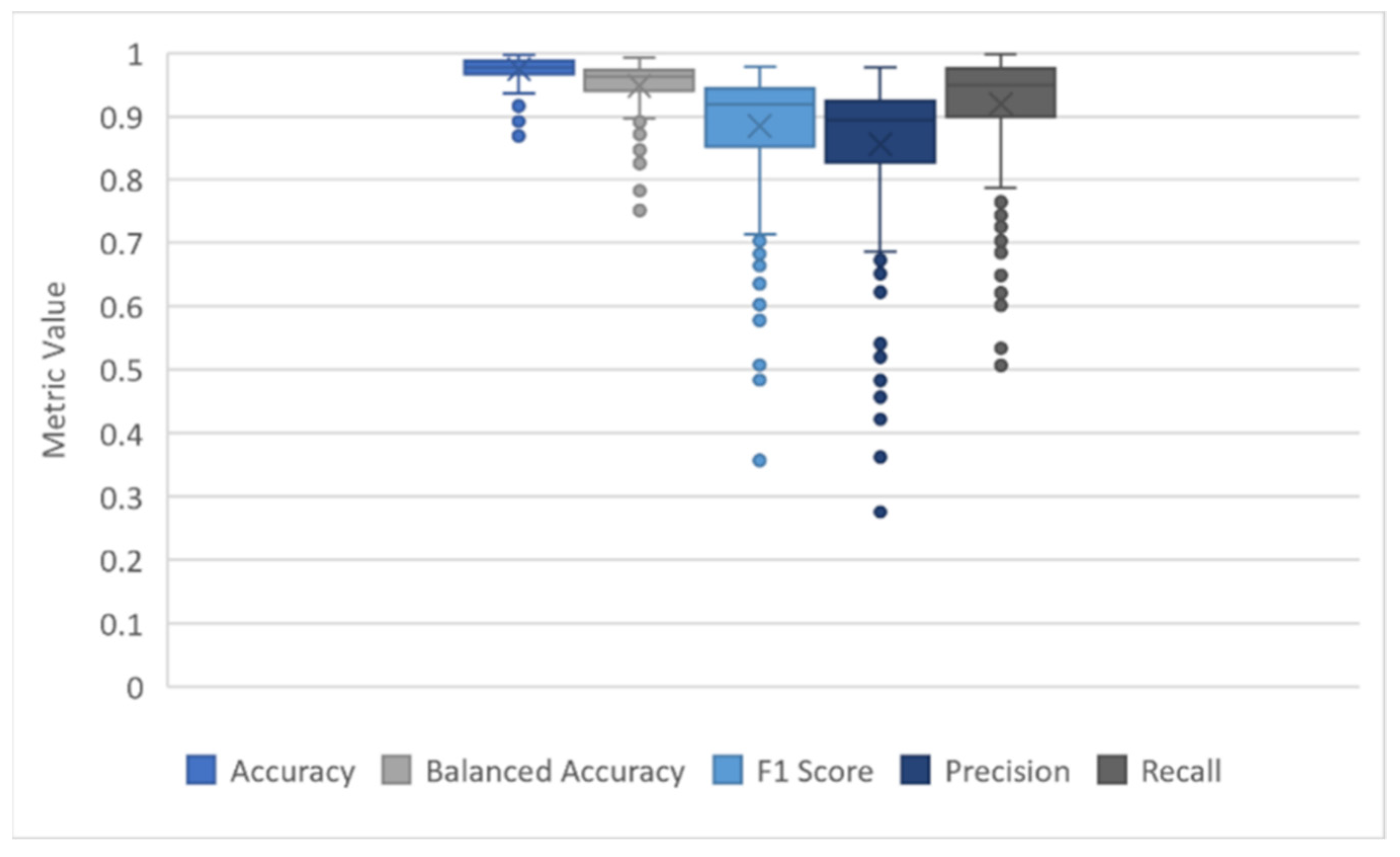
3.3. Spectral Random Forest Classifier Results
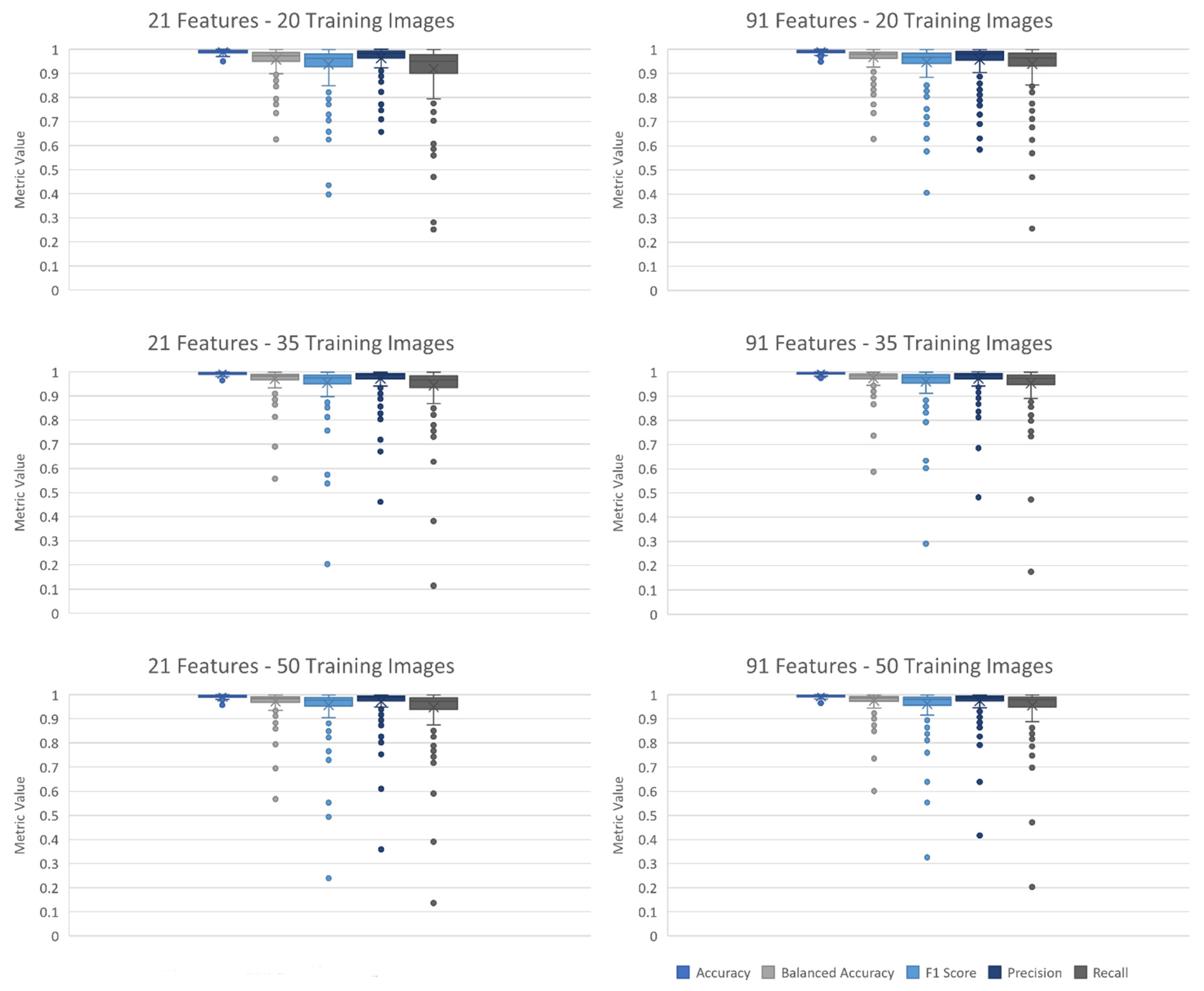
3.4. Textural Random Forest Classifier Results
3.4.1. Feature Selection and Importance
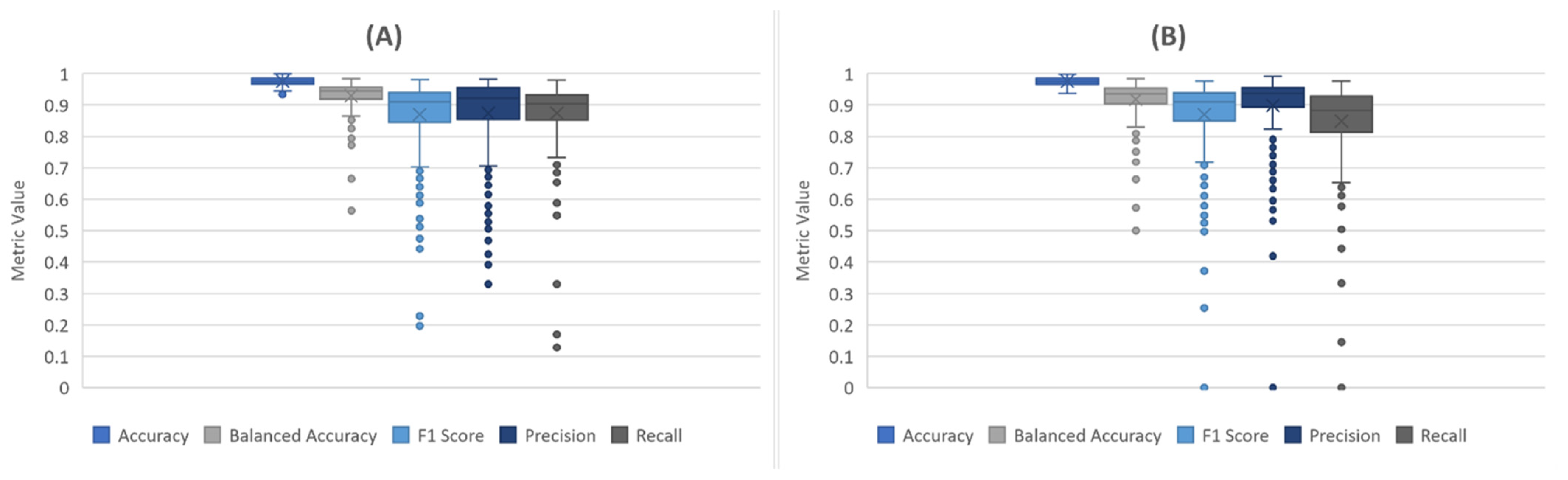
3.4.2. Classifier Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Feature Selection and Importance
Appendix A.1.1. Normalization and Maximum Values
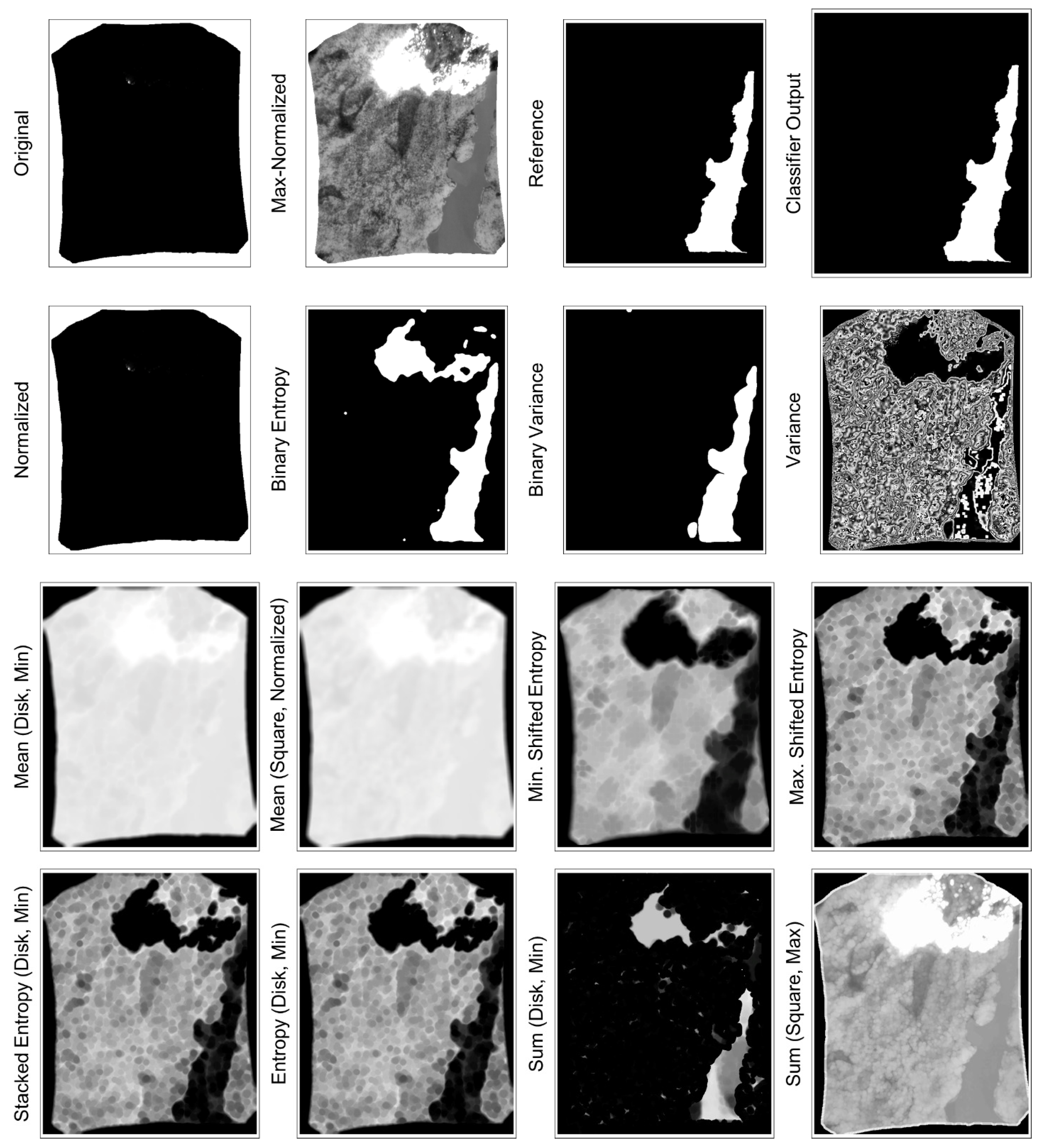
Appendix A.1.2. Texture and Context Measures
Appendix A.1.3. Filter Combination Features
References
- Giglio, L.; Boschetti, L.; Roy, D.P.; Humber, M.L.; Justice, C.O. The Collection 6 MODIS Burned Area Mapping Algorithm and Product. Remote Sens. Environ. 2018, 217, 72–85. [Google Scholar] [CrossRef] [PubMed]
- Stocks, B.J.; Mason, J.A.; Todd, J.B.; Bosch, E.M.; Wotton, B.M.; Amiro, B.D.; Flannigan, M.D.; Hirsch, K.G.; Logan, K.A.; Martell, D.L.; et al. Large Forest Fires in Canada, 1959–1997. J. Geophys. Res. Atmos. 2002, 107, FFR 5-1–FFR 5-12. [Google Scholar] [CrossRef]
- Hanes, C.C.; Wang, X.; Jain, P.; Parisien, M.-A.; Little, J.M.; Flannigan, M.D. Fire-Regime Changes in Canada over the Last Half Century. Can. J. For. Res. 2018, 49, 256–269. [Google Scholar] [CrossRef]
- Flannigan, M.; Cantin, A.S.; de Groot, W.J.; Wotton, M.; Newbery, A.; Gowman, L.M. Global Wildland Fire Season Severity in the 21st Century. For. Ecol. Manag. 2013, 294, 54–61. [Google Scholar] [CrossRef]
- Wang, X.; Parisien, M.-A.; Taylor, S.W.; Candau, J.-N.; Stralberg, D.; Marshall, G.A.; Little, J.M.; Flannigan, M.D. Projected Changes in Daily Fire Spread across Canada over the next Century. Environ. Res. Lett. 2017, 12, 025005. [Google Scholar] [CrossRef]
- Wotton, B.M.; Flannigan, M.D.; Marshall, G.A. Potential Climate Change Impacts on Fire Intensity and Key Wildfire Suppression Thresholds in Canada. Environ. Res. Lett. 2017, 12, 095003. [Google Scholar] [CrossRef]
- Wang, X.; Studens, K.; Parisien, M.-A.; Taylor, S.W.; Candau, J.-N.; Boulanger, Y.; Flannigan, M.D. Projected Changes in Fire Size from Daily Spread Potential in Canada over the 21st Century. Environ. Res. Lett. 2020, 15, 104048. [Google Scholar] [CrossRef]
- Tymstra, C.; Stocks, B.J.; Cai, X.; Flannigan, M.D. Wildfire Management in Canada: Review, Challenges and Opportunities. Prog. Disaster Sci. 2020, 5, 100045. [Google Scholar] [CrossRef]
- Johnston, L.M.; Flannigan, M.D. Mapping Canadian Wildland Fire Interface Areas. Int. J. Wildland Fire 2018, 27, 1–14. [Google Scholar] [CrossRef]
- Wooster, M.J.; Roberts, G.; Smith, A.M.S.; Johnston, J.; Freeborn, P.; Amici, S.; Hudak, A.T. Thermal Remote Sensing of Active Vegetation Fires and Biomass Burning Events. In Thermal Infrared Remote Sensing: Sensors, Methods, Applications; Kuenzer, C., Dech, S., Eds.; Remote Sensing and Digital Image Processing; Springer: Dordrecht, The Netherlands, 2013; pp. 347–390. ISBN 978-94-007-6639-6. [Google Scholar]
- George, C.W.; Ewart, G.F.; Friauf, W.C. FLIR: A Promising Tool for Air-Attack Supervisors. Fire Manag. Notes 1989, 50, 26–29. [Google Scholar]
- Allison, R.S.; Johnston, J.M.; Craig, G.; Jennings, S. Airborne Optical and Thermal Remote Sensing for Wildfire Detection and Monitoring. Sensors 2016, 16, 1310. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dickinson, M.B.; Hudak, A.T.; Zajkowski, T.; Loudermilk, E.L.; Schroeder, W.; Ellison, L.; Kremens, R.L.; Holley, W.; Martinez, O.; Paxton, A.; et al. Measuring Radiant Emissions from Entire Prescribed Fires with Ground, Airborne and Satellite Sensors—RxCADRE 2012. Int. J. Wildland Fire 2016, 25, 48–61. [Google Scholar] [CrossRef] [Green Version]
- Valero, M.M.; Rios, O.; Pastor, E.; Planas, E. Automated Location of Active Fire Perimeters in Aerial Infrared Imaging Using Unsupervised Edge Detectors. Int. J. Wildland Fire 2018, 27, 241–256. [Google Scholar] [CrossRef] [Green Version]
- Valero, M.M.; Verstockt, S.; Rios, O.; Pastor, E.; Vandecasteele, F.; Planas, E. Flame Filtering and Perimeter Localization of Wildfires Using Aerial Thermal Imagery. In Proceedings of the Thermosense: Thermal Infrared Applications XXXIX, Anaheim, CA, USA, 5 May 2017; Volume 10214, p. 1021404. [Google Scholar]
- Martinez-de Dios, J.R.; Arrue, B.C.; Ollero, A.; Merino, L.; Gómez-Rodríguez, F. Computer Vision Techniques for Forest Fire Perception. Image Vis. Comput. 2008, 26, 550–562. [Google Scholar] [CrossRef]
- Shimazaki, R.; Green, R. Perimeter Detection of Burnt Rural Fire Regions. In Proceedings of the 29th International Conference on Image and Vision Computing New Zealand, New York, NY, USA, 19 November 2014; pp. 184–189. [Google Scholar]
- Toulouse, T.; Rossi, L.; Celik, T.; Akhloufi, M. Automatic Fire Pixel Detection Using Image Processing: A Comparative Analysis of Rule-Based and Machine Learning-Based Methods. SIViP 2016, 10, 647–654. [Google Scholar] [CrossRef] [Green Version]
- Johnston, J.M.; Cantin, A.S.; Lachance, M. Torchlight: Automating the Art of Tactical Wildfire Mapping. In Proceedings of the CFS-CIF e-Lecture Fall 2018 & Winter 2019 Series, virtual, 31 October 2018. [Google Scholar]
- Johnston, J.M.; Cantin, A.S.; Lachance, M. Torchlight 2018: Advancements and Lessons Learned. In Proceedings of the Tactical Fire Remote Sensing Advisory Committee (TFRSAC), NIFC, Boise, ID, USA, 24 October 2018. [Google Scholar]
- Zhukov, B.; Lorenz, E.; Oertel, D.; Wooster, M.; Roberts, G. Spaceborne Detection and Characterization of Fires during the Bi-Spectral Infrared Detection (BIRD) Experimental Small Satellite Mission (2001–2004). Remote Sens. Environ. 2006, 100, 29–51. [Google Scholar] [CrossRef]
- Hafizi, H.; Kalkan, K. Evaluation of Object-Based Water Body Extraction Approaches Using Landsat-8 Imagery. Havacılık Ve Uzay Teknol. Derg. 2020, 13, 87–89. [Google Scholar]
- Muhadi, N.A.; Abdullah, A.F.; Bejo, S.K.; Mahadi, M.R.; Mijic, A. Image Segmentation Methods for Flood Monitoring System. Water 2020, 12, 1825. [Google Scholar] [CrossRef]
- Nath, R.K.; Deb, S.K. Water-Body Area Extraction from High Resolution Satellite Images—An Introduction, Review, and Comparison. IJIP 2010, 3, 353–372. [Google Scholar]
- Sun, F.; Sun, W.; Chen, J.; Gong, P. Comparison and Improvement of Methods for Identifying Waterbodies in Remotely Sensed Imagery. Int. J. Remote Sens. 2012, 33, 6854–6875. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, P.; Chen, C.; Jiang, T.; Yu, Z.; Guo, B. Waterbody Information Extraction from Remote-Sensing Images after Disasters Based on Spectral Information and Characteristic Knowledge. Int. J. Remote Sens. 2017, 38, 1404–1422. [Google Scholar] [CrossRef]
- Du, Y.; Zhang, Y.; Ling, F.; Wang, Q.; Li, W.; Li, X. Water Bodies’ Mapping from Sentinel-2 Imagery with Modified Normalized Difference Water Index at 10-m Spatial Resolution Produced by Sharpening the SWIR Band. Remote Sens. 2016, 8, 354. [Google Scholar] [CrossRef] [Green Version]
- Rankin, A.; Matthies, L. Daytime Water Detection Based on Color Variation. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 215–221. [Google Scholar] [CrossRef]
- Hamilton, D.; Myers, B.; Branham, J. Evaluation of Texture as an Input of Spatial Context for Machine Learning Mapping of Wildland Fire Effects. Signal Image Process. Int. J. 2017, 8, 1–11. [Google Scholar] [CrossRef]
- Haralick, R.; Shanmugam, K.; Dinstein, I. Textural Features for Image Classification. IEEE Trans. Syst. Man Cybern. 1973, SMC-3, 610–621. [Google Scholar] [CrossRef] [Green Version]
- Smith, A.M.S.; Wooster, M.J.; Powell, A.K.; Usher, D. Texture Based Feature Extraction: Application to Burn Scar Detection in Earth Observation Satellite Sensor Imagery. Int. J. Remote Sens. 2002, 23, 1733–1739. [Google Scholar] [CrossRef]
- Herry, C.L.; Goubran, R.A.; Frize, M. Segmentation of Infrared Images Using Cued Morphological Processing of Edge Maps. In Proceedings of the 2007 IEEE Instrumentation Measurement Technology Conference IMTC 2007, Warsaw, Poland, 1–3 May 2007; pp. 1–6. [Google Scholar]
- Li, C.; Xia, W.; Yan, Y.; Luo, B.; Tang, J. Segmenting Objects in Day and Night:Edge-Conditioned CNN for Thermal Image Semantic Segmentation. arXiv 2019, arXiv:1907.10303. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Canadian Forest Service. National Burned Area Composite (NBAC); Natural Resources Canada, Canadian Forest Service, Northern Forestry Centre: Edmonton, AB, Canada, 2021. [Google Scholar]
- CanVec Series—Hydrographic Features—Lakes, Rivers and Glaciers in Canada; Natural Resources Canada: Ottawa, ON, Canada, 2019.
- QGIS Geographic Information System; QGIS Association: 2020. Available online: http://www.qgis.org/ (accessed on 7 December 2020).
- GDAL Development Team. GDAL—Geospatial Data Abstraction Library; Open Source Geospatial Foundation: Beaverton, OR, USA, 2020. [Google Scholar]
- Van der Walt, S.; Schönberger, J.L.; Nunez-Iglesias, J.; Boulogne, F.; Warner, J.D.; Yager, N.; Gouillart, E.; Yu, T. Scikit-Image: Image Processing in Python. PeerJ 2014, 2, e453. [Google Scholar] [CrossRef]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef] [Green Version]
- Wilson, P.A. Rule-Based Classification of Water in Landsat MSS Images Using the Variance Filter. Photogramm. Eng. Remote Sens. 1997, 7, 5. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Kuhn, M. Building Predictive Models in R Using the Caret Package. J. Stat. Softw. 2008, 28, 1–26. [Google Scholar] [CrossRef] [Green Version]
- Collins, L.; Griffioen, P.; Newell, G.; Mellor, A. The Utility of Random Forests for Wildfire Severity Mapping. Remote Sens. Environ. 2018, 216, 374–384. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filter Name | Description/Equation | Filter Input | Kernel Shape | Kernel Sizes a | Secondary Filter Applied b | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Orig. | Norm | Max-Norm | Disk | Square | Min | Max | Var | Ent | |||
| Standard Image Filters | |||||||||||
| Entropy (Ent) | Local entropy using base 2 log. | ✓ | ✓ | ✓ | ✓ | 2–5, 7, 15, 25, 55 | ✓ | ✓ | ✓ | ✓ | |
| Mean | Local mean value. | ✓ | ✓ | ✓ | ✓ | 2–5, 7, 15, 25, 55 | ✓ | ✓ | ✓ | ✓ | |
| Subtracted Mean | Difference between centre value and local mean value. | ✓ | ✓ | ✓ | ✓ | 2–5, 7, 15, 25, 55 | ✓ | ✓ | ✓ | ✓ | |
| Sum | Sum of local values. | ✓ | ✓ | ✓ | ✓ | 2–5, 7, 15, 25, 55 | ✓ | ✓ | ✓ | ✓ | |
| Threshold | Local threshold value. | ✓ | ✓ | ✓ | ✓ | 2–5, 7, 15, 25, 55 | ✓ | ✓ | ✓ | ✓ | |
| Variance (Var) | Average of squared differences from mean. | ✓ c | ✓ c | ✓ | 2–10 | ✓ | ✓ | ✓ | ✓ | ||
| Grey-Level Co-Occurrence Matrix (GLCM) Filters d | |||||||||||
| Angular Second Moment (ASM) | ✓ | ✓ | ✓ | 7 | |||||||
| Contrast | ✓ | ✓ | ✓ | 7 | |||||||
| Correlation | ✓ | ✓ | ✓ | 7 | |||||||
| Dissimilarity | ✓ | ✓ | ✓ | 7 | |||||||
| Energy | ✓ | ✓ | ✓ | 7 | |||||||
| Homogeneity | ✓ | ✓ | ✓ | 7 | |||||||
| Combination Image Filters | |||||||||||
| Scaled Entropy Stack (SES) | Local entropy calculated with increasing capped max pixel values. Matrices merged, storing max entropy calculated at each pixel. | ✓ | ✓ | ✓ | ✓ | ✓ | 2–5, 7, 15, 25, 55 | ✓ | ✓ | ✓ | ✓ |
| Minimum Shifted Entropy (SEmin) | Local entropy for pixel at centre, top, bottom, far left, and far right of kernel. Minimum value stored. | ✓ | ✓ | ✓ | 2–5, 7, 15, 25,55 | ✓ | ✓ | ✓ | ✓ | ||
| Maximum Shifted Entropy (SEmax) | Local entropy for pixel at centre, top, bottom, far left, and far right of kernel. Maximum value stored. | ✓ | ✓ | ✓ | 2–5, 7, 15, 25,55 | ✓ | ✓ | ✓ | ✓ | ||
| Binary Variance (BV) | Local zero-variance pixels with are grown into regions through morphological dilation and erosion. | ✓ c | ✓ c | ✓ | 2, 3, 4 | ||||||
| Binary Entropy (BE) | Local low entropy pixels are selected as water. Minimum filter passes reduce noise, followed by a maximum filter to regrow lost area. | ✓ c | ✓ c | ✓ | ✓ | 2–5, 7, 15, 25, 55 | |||||
| Metric | Equation |
|---|---|
| Accuracy | |
| Balanced Accuracy | |
| F1 Score | |
| Precision | |
| Recall |
| Static GIS Data (CanVec) | Binary Entropy | Binary Variance | Random Forest Classifier | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Number of Features | 1 | 1 | 1 | 21 | 21 | 21 | 91 | 91 | 91 |
| Number of Training Images | - | - | - | 20 | 35 | 50 | 20 | 35 | 50 |
| Accuracy | 0.975 (0.017) | 0.975 (0.012) | 0.976 (0.013) | 0.988 (0.009) | 0.992 (0.005) | 0.992 (0.005) | 0.989 (0.008) | 0.992 (0.004) | 0.993 (0.005) |
| Balanced Accuracy | 0.965 (0.041) | 0.953 (0.050) | 0.947 (0.062) | 0.971 (0.052) | 0.980 (0.042) | 0.981 (0.044) | 0.977 (0.042) | 0.983 (0.037) | 0.984 (0.039) |
| F1 Score | 0.923 (0.094) | 0.921 (0.115) | 0.921 (0.119) | 0.961 (0.081) | 0.973 (0.074) | 0.974 (0.078) | 0.966 (0.071) | 0.976 (0.064) | 0.976 (0.067) |
| Precision | 0.897 (0.109) | 0.923 (0.132) | 0.938 (0.115) | 0.976 (0.058) | 0.983 (0.053) | 0.982 (0.063) | 0.973 (0.067) | 0.983 (0.050) | 0.982 (0.055) |
| Recall | 0.949 (0.083) | 0.920 (0.102) | 0.905 (0.128) | 0.945 (0.104) | 0.963 (0.086) | 0.966 (0.088) | 0.960 (0.083) | 0.969 (0.075) | 0.971 (0.078) |
| Average Feature Generation Time (s) a | 19.620 b | 0.519 | 1.368 | 10.268 | 10.268 | 10.268 | 34.693 | 34.693 | 34.693 |
| Average Classification Time (s) c | - | - | - | 0.349 | 0.349 | 0.349 | 0.446 | 0.446 | 0.446 |
| Average Total Processing Time per Image (s) | 19.620 | 0.519 | 1.368 | 10.617 | 10.617 | 10.617 | 35.139 | 35.139 | 35.139 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oliver, J.A.; Pivot, F.C.; Tan, Q.; Cantin, A.S.; Wooster, M.J.; Johnston, J.M. A Machine Learning Approach to Waterbody Segmentation in Thermal Infrared Imagery in Support of Tactical Wildfire Mapping. Remote Sens. 2022, 14, 2262. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14092262
Oliver JA, Pivot FC, Tan Q, Cantin AS, Wooster MJ, Johnston JM. A Machine Learning Approach to Waterbody Segmentation in Thermal Infrared Imagery in Support of Tactical Wildfire Mapping. Remote Sensing. 2022; 14(9):2262. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14092262
Chicago/Turabian StyleOliver, Jacqueline A., Frédérique C. Pivot, Qing Tan, Alan S. Cantin, Martin J. Wooster, and Joshua M. Johnston. 2022. "A Machine Learning Approach to Waterbody Segmentation in Thermal Infrared Imagery in Support of Tactical Wildfire Mapping" Remote Sensing 14, no. 9: 2262. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14092262