1. Introduction
The measurement of ship surface wind parameters
is used for ship control, navigation, maritime military operations, and the SHOL envelope establishment of carrier-based aircraft [
1,
2]. The airflow field usually changes with space and time and changes when passing through the ship and its structure, resulting in an increasing bias in the measured value of the anemometer. In severe cases, this will directly threaten the safety of military activities and military operations [
3,
4,
5]. The traditional measurement method assumes free flow in the arrangement area of the anemometer at the mast. However, with the development of ship technology, more and more large-scale monitoring and investigation equipment is arranged on the ship’s surface, and the damage to this assumption becomes more and more serious [
6,
7]. As a result, the error in the actual measurement of wind parameters increases and can no longer meet the requirements of the measurement accuracy of wind parameters for sensitive operations such as carrier-based aircraft take-off and landing [
8]. The measurement of the ship’s surface wind field is particularly important for ships that provide the take-off and landing of carrier-based aircraft because these operations may be unsafe or impossible to implement under poor wind measurement conditions. Therefore, high-precision wind field measurement is of great significance for ships during offshore operations. The ship’s surface wind parameters
are measured directly with an anemometer mounted on the mast, and the sea surface wind parameters
are measured by marine radar. Two main aspects of the ship’s surface wind parameters
were studied by many researchers: deviation analysis and bias correction [
9].
Deviation analysis relies on various methodologies to understand the relationship between anemometer readings and true wind conditions. It encompasses wind tunnel tests [
10], computational fluid dynamics (CFD) simulations [
11,
12,
13,
14], real sea trials [
15], and other experimental techniques. Its primary aim is to identify disparities between the readings and the actual wind, examining the extent to which these variations deviate from the established baseline trend. In a study conducted by Yelland et al. [
16], a CFD model was utilized to simulate the airflow around a ship. Anemometers were strategically positioned in exposed and non-exposed areas to capture wind speed measurements. The findings revealed a discrepancy in wind speed readings of approximately 10%. Subsequently, Moat et al. [
17,
18,
19], building upon Yelland’s work, investigated various anemometer placement configurations. Their research highlighted that the correct placement of anemometers reduced distortions in the airflow field. Further investigation by O’Sullivan et al. [
20] suggested that discrepancies between measured values and actual wind conditions were potentially influenced by the selection of inappropriate CFD numerical simulation models. They proceeded to compare CFD simulation outcomes with the measured values from the RV Celtic Explorer ship, detecting an error margin of less than 12%. Following the replacement of the CFD numerical simulation model, the accuracy of the simulation results significantly improved by approximately 3% using the Large Eddy Simulation (LES) model [
21]. This type of research predominantly focuses on the influence of a ship’s surface structure on measurement discrepancies. It scrutinizes the distortion levels present in the single-point anemometer measurements, which, though informative, are unable to provide a comprehensive understanding of the effective wind parameters.
Bias correction is a vital aspect of wind parameter measurement, necessitating the rectification of biases in ship anemometer measurements [
22]. Several methods are employed for this purpose, including the table-check method [
23,
24], the anemometer bias management (ABM) strategy [
15], and the bias correction combination four-anemometer weighted fusion algorithm (FAF-BC) [
25]. These studies are designed to mitigate or eliminate deviations between the measured wind parameter values and the actual wind conditions. The table-check method, as investigated by Blanc et al. [
26,
27], aims to correct the readings of individual anemometers located near the mast and assess its effectiveness, particularly in ideal environmental conditions. Recent research by Polsky et al. [
28] revealed that the anemometer mounted on the ship’s mast is significantly affected by mast-induced shelter, as observed during a computational fluid dynamics (CFD) numerical simulation experiment. Consequently, the Anemometer Position Evaluation (APE) strategy was proposed to delineate the range of wind indications suitable for indicating carrier-based aircraft flight operations, effectively reducing anemometer measurement deviations by excluding unsuitable wind indication ranges. Following the APE strategy, Thornhill et al. [
15] introduced the ABM strategy, which involves bias correction within the anemometer’s useful angle range to enhance the accuracy of wind parameter measurements on the ship’s surface. To further reduce anemometer measurement deviations, the bias correction links in ABM strategies were used by Zhang et al. [
25] to jointly estimate the measured values of the four anemometers with the FAF-BC algorithm. This integrated approach contributes to a more precise correction of anemometer measurement biases. This type of research involves obtaining deviation information through deviation analysis and subsequently rectifying these biases through bias correction techniques. Deviation analysis research primarily concentrates on identifying and pinpointing deviations in wind parameters, whereas bias correction research is geared towards mitigating these biases in wind parameters. Although bias correction methods can yield more accurate wind parameter measurements compared to deviation analysis alone, they currently fall short of fulfilling the requirements for enhancing the precision of wind field measurements.
Marine radar offers the advantage of remotely sensing sea surface wind parameters
from a distance of approximately 1 to 2 km from the ship. This method avoids most of the obstruction caused by the ship’s upper structure, and the measured values can be considered as representing undistorted winds at an infinite distance [
29,
30,
31]. The algorithms [
32] for small-scale streak retrieval include, but are not limited to, the local gradient method (LGM), the adaptive reduction method (ARM), and the energy spectrum method (ESM). To obtain an image with only wind streaks, the LGM algorithm [
33] required the integration, smoothing, and subsampling of the radar image sequence. Then, the LGM algorithm was implemented to determine the gradient direction of the image. To resolve the 180° ambiguity, normalized radar cross-sections (NRCS) were compared to the direction of the sea surface wind
. In determining the direction of the sea surface wind
, the ARM algorithm [
34] applied an adaptive reduction operator followed by an adaptive local gradient. In the ESM algorithm [
35], the sea surface static image was first obtained, and then the small-scale wind streaks were extracted. Finally, more accurate sea surface wind direction parameter information was extracted. The ship’s surface wind field is usually measured by shipborne anemometers. However, the measurement can be significantly affected by obstructions (e.g., mast). There is a noticeable absence of research on applying remote sensing wind direction data for the calibration of ship surface wind fields. The X-band marine radar can measure sea surface wind within a range of approximately 1 to 2 km from the ship. In this study, we propose to employ marine radar-derived wind field parameters to rectify the anemometer’s wind measurements to obtain more precise wind parameters on the ship’s surface.
The CFD numerical simulation technology was used by [
25] to obtain the distortion characteristics of the airflow field around the anemometer arrangement area under different speeds. On the basis of correcting the bias of the anemometer, the multi-anemometer measurements were fused and estimated to obtain the only effective wind parameter information. The research showed that the wind measurement error was still too large. In order to meet the strong demand of users for an improvement in accuracy, in this paper, we carry out further research on the basis of [
25]. Firstly, a multivariate bias strategy is proposed to optimize the layout of multiple anemometers at the mast. Secondly, the random forest (RF) algorithm is proposed to overcome the limitations of traditional algorithms and accurately express the nonlinear characteristics of the data. Finally, the wind direction parameters of marine radar are introduced to jointly estimate the steady-state wind parameters on the ship’s surface
.
Regarding studies on wind parameters estimated with multiple anemometers, they are limited to improving the accuracy of wind parameter estimation using only anemometer data. Therefore, it is valuable to combine these data with X-band marine radar to improve the estimation accuracy of wind parameters. In this paper, numerical simulations are used to obtain the anemometer steady-state wind field simulation data on a ship’s surface (
Section 2). Then, according to the wind field simulation data, the RCRF algorithm is proposed, and the process of this algorithm is introduced (
Section 3). To verify the performance of the algorithm, the estimated wind parameters are compared and analyzed in
Section 4. In addition, both the Back Propagation (BP) algorithm and the RF algorithm have never been used for ship surface wind calibration. In this study, both algorithms are employed and compared for ship surface wind correction. Finally, this paper is summarized (
Section 5).
3. Method
The anemometer at the mast of the actual ship surface is often blocked by the surrounding structure, which makes the anemometer unable to accurately measure the undistorted wind [
31]. At the mast, each anemometer is affected by the airflow distortion phenomenon at different undistorted relative wind angles. For the anemometer with poor exposure conditions, the wind direction deviation is up to 22%, and the wind speed deviation is up to approximately 25% [
15]. Usually, there are two or more anemometers arranged at the mast of a ship. The traditional wind parameter measurement method [
8] selects the anemometer measurement value with the largest measured wind speed as the final wind parameter output. This method requires that the airflow field in the mast anemometer arrangement area is not disturbed by the hull structure. Therefore, when the airflow field in the mast anemometer layout area tends to be stable, the method is effective and can be used as a source of verification data for wind retrieved by radar images. However, when the ship mast anemometer is in a complex arrangement position, the center diameter of the ship, especially the military ship mast, is larger than that of other types of ships, and the shielding range of the anemometer is increased, resulting in a large error in the wind parameter measurement value output by the traditional method. However, the X-band marine radar can effectively compensate for the error caused by the anemometer wind measurement due to its advantage of not being occluded in the measurement area [
38,
39]. Therefore, the retrieved theory of the sea surface wind parameters
of X-band marine radar and the strong nonlinear mapping characteristics of the random forest (RF) algorithm are used, and the RCRF algorithm is proposed in this paper. The structure flow of this algorithm is shown in
Figure 1.
The focus of this study is slightly different from the FAF-BC algorithm [
25]. Firstly, a multivariate bias strategy is proposed to study the optimal layout of multiple anemometers at the mast. In practical engineering applications, when there are multiple anemometers on the ship’s surface, the arrangement position of the anemometers is often obscured by the surrounding structures, resulting in inaccurate measurement values. With the continuous updating and upgrading of the ship structure, more and more equipment is installed near the mast, which leads to the problem of a large error between the measured value of the anemometer and the free airflow at infinity. Therefore, addressing the multi-anemometer layout problem is the first step towards solving the problem of a large error between the measured value and the free airflow at infinity and provides an effective measurement value for the subsequent multi-anemometer estimation problem. Secondly, it is worth noting that the application of machine learning algorithms such as BP, support vector machine (SVM), and RF is becoming more and more extensive. The RF algorithm belongs to the ensemble learning family, combining multiple weak classifiers to achieve a better ensemble classifier. Due to the nonlinear characteristics of the data, the RF has good robustness to noise and missing data, and the training speed is relatively fast when dealing with large datasets. Another trend is to combine previous physical knowledge with machine learning models to overcome the limitations of traditional methods, which often fail to accurately obtain the complex relationships between wind parameters. Finally, people are becoming more and more interested in machine learning models. Accurate and reliable prediction is crucial for carrier-based aircraft pilots to make decisions. Thirdly, the airflow field changes with space and time in the real environment, and the anemometer at the mast produces a turbulence effect when measuring the wind parameters. The X-band marine radar can filter out the random turbulence generated by the wind field through its low-pass filtering. On the other hand, the measurement of the anemometer at the mast is easily affected by the occlusion of the structure and the steering of the ship. The airflow field around the anemometer is unstable and disturbed, such that there is a large error between the wind parameters measured by the anemometer and the free airflow wind parameters. The marine radar has the advantage of remotely sensing the sea surface wind field information at a distance of 1 km from the ship, avoiding the occlusion of the upper structure of the ship, and the measured value can be approximated as the free airflow at infinity. Therefore, the combination of the measured values of the marine radar and the anemometer can theoretically avoid the problem of a large error in the measured values when the ship mast anemometer is in a complex arrangement position and can improve the estimation accuracy of the steady-state wind parameters on the ship’s surface
.
3.1. Simulating Anemometer Wind Data
3.1.1. Optimal Layout of Multiple Anemometers Based on Multivariate Bias Strategy
Usually, anemometers are arranged on the left and right sides of the central mast of the bridge to monitor the wind field on the ship’s surface in real time, and the method of employing angle bias and speed bias [
15] is widely used to study the layout of the dual anemometers. However, wind in nature is composed of wind speed and wind direction; that is, the wind field is a vector. The wind field data measured by the anemometer at any time include two inseparable parts: wind speed and wind direction. The process of using the angle bias and speed bias to evaluate the measured wind direction and wind speed, respectively, may cause a large bias of the measured wind speed at a certain moment, but the bias of the measured wind direction is small. It may also cause a small bias of the measured wind speed at a certain moment, but the bias of the measured wind direction is very large. This will lead to an inability to understand the true biases of the wind vector measured at each moment.
At present, most researchers are focused on the optimal layout method of dual anemometers, but there are relatively few studies on the optimal layout method of multiple anemometers. In practical engineering, the layout of multiple anemometers can better monitor the wind parameters of airflow at infinity at different angles. Therefore, to obtain more comprehensive and accurate wind parameter information in a given arrangement position, an optimal layout method for multiple anemometers based on the multivariate bias strategy is constructed. The multivariate bias method is used as the index to judge the wind parameter error, and the optimal arrangement scheme of the multiple anemometers is determined by analyzing the error results. The flow chart is shown in
Figure 2.
The 24 wind monitoring points calculated in
Table 1 are used as the wind field information of the primary selection monitoring points, and the number of monitoring points ranges from 2 to 24. Because the dimension of angle bias is given in degrees, and the speed bias has no dimension, the first evaluation index of multivariate bias is proposed: the relative bias of wind parameters. It is defined as the sum of the relative error of angle bias and the relative error of speed bias.
where
is the relative bias of wind parameters;
is the relative error of angle bias;
is the relative error of speed bias;
is the angle bias, which is defined as the difference between the measured wind direction and the initial wind direction;
is the speed bias, which is defined as the ratio between the measured wind speed and the initial wind speed; and
is the initial wind direction. When the wind parameter bias is smaller, the accuracy of the measured wind field is higher; otherwise, the accuracy of the measured wind field is lower. In addition, the second evaluation index of multivariate bias is proposed: wind vector difference. This represents the vector error between the initial wind parameters and the measured wind parameters. The larger the wind vector differential mode, the larger the error between the initial wind parameters and the measured wind parameters. The wind vector difference includes not only the relationship between the initial wind speed and the measured wind speed but also the relationship with wind direction. The wind field error vector diagram is shown in
Figure 3.
is the initial wind speed vector;
is the measured wind speed vector;
is the initial wind direction;
is the measured wind direction; and
is the wind vector difference. Then, the wind vector difference is
where
and
are unit vectors of the X and Y axes. The relative errors of wind vector differential mode
and wind vector differential mode
are
Since there are 72 sets of wind field data under each speed case, the wind field data under each speed case are averaged. Finally, the relative biases of the wind parameters and wind vector difference are fused:
where
is the multivariate bias value, and
is the
relative bias of the wind parameters.
3.1.2. Random Forest (RF)-Based Wind Parameter Estimation Algorithm
In 2001, Breiman Leo and Adele Cutler [
40] proposed that random forest is an ensemble learning algorithm. The algorithm contains two key parameters: the number of decision trees and the input characteristics of a single decision tree. The voting of multiple decision trees is used to solve classification and prediction questions in the RF algorithm [
41]. In practice, the measured data volume of the anemometer is small, the data randomness is strong, the data are greatly affected by noise, and there are some missing cases. Compared with other machine learning algorithms or boosting tree methods [
42], the RF algorithm has a relatively good prediction effect when training small-scale data. This is because each decision tree is trained independently and can be calculated in parallel, and it also has certain advantages in large-scale calculation. Due to the introduction of two sources of randomness in the training process, the RF algorithm is not easy to over-fit and has good anti-noise ability. Moreover, for such data with partial loss, high accuracy can still be maintained. The learning process of the algorithm is relatively fast. The RF algorithm is insensitive to multivariate collinearity, and the results are more robust to missing data and unbalanced data. Therefore, the RF model is designed to estimate the wind parameters of the different multi-anemometer layout schemes on the ship. The principles of random forest are as follows:
Data selection: The initial wind speed and wind direction are taken as the input (wind direction is initially every 5° interval, and the wind speed is initially 3 m/s, 6 m/s, 9 m/s, 12 m/s, or 15 m/s). Additionally, the CFD wind direction and CFD wind speed measurements under the optimal layout at four different positions are taken as input samples in the training process. Using random sampling and feature selection, the samples are inputted into the RF algorithm to predict wind speed and wind direction. The resulting predictions are referred to as RF wind direction and RF wind speed . There are 365 sets of data in the CFD wind database, 80% of which are selected as training data and 20% as testing data;
Constructing the random forest: The bootstrap method [
43] is used to sample the training data 292 times randomly with return sampling. Some data may be selected multiple times due to the replacement extraction, and some data may not be selected. The samples taken out each time are not exactly the same, and these samples constitute the training data set of the decision tree
. This operation is repeated to generate the training set
, so as to generate
decision trees for the construction of the random forest model;
Feature selection: The CFD wind direction and CFD wind speed at four positions of the anemometer are used as the features of the sample data, so the sample data have eight features. In each decision tree node split, the RF randomly selects features from all the features with each feature without return. Three features are selected in this paper, and the best segmentation attributes are selected as nodes to build multiple classification and regression trees (CART). The size of during the growth of the decision tree is always the same;
Parameter initialization: The number of decision trees ranges from 1 to 292, and the number of decision trees increases by 10 per round of training. The minimum number of leaves is increased by 1 per training from 1. The training method is regression, and the expected error is set to 1 × 10−5;
Model training: The multiple decision trees established above form a forest. For each decision tree, the above-selected samples and features are used for training.
Figure 4 is the training process structure diagram;
Results prediction: Similarly, the bootstrap method is also used to generate the testing set
by performing 73 times randomly with return sampling on the testing sample data. After repeating this operation, the testing set
is generated. The information on the anemometer parameters at different positions studied in this paper is estimated as a regression problem. Therefore, based on the idea of ensemble learning, the mean value of each regression tree is taken as the prediction result. The formula is as follows:
where
is the model prediction result;
is output based on
and
;
is the independent variable;
is an independent and identically distributed random vector; and
is the number of regression decision trees.
Figure 5 shows the testing process structure diagram.
Model evaluation: Comparing the testing set error results of different decision tree numbers and leaf numbers, the optimal RF wind parameters are output when the error reaches the expected value.
Figure 6 shows the flow chart of RF model training.
In this model, the number of decision trees is set to 200, the minimum number of leaves is set to 2, and the prediction method is set to regression. The training error reaches the expected value when 20 decision trees are trained. At this time, the error of the sample is as low as 5.7264 × 10
−6, and the correlation coefficient calculated by the two samples is greater than 0.99. The error value of the training set is 0.105, and the error value of the test set is 0.138. The error value of the two datasets is small, so this training model does not produce an over-fitting phenomenon, and the fitting effect is very good, as shown in
Figure 7 and
Figure 8.
3.2. Radar Wind Direction Retrieval
In this paper, the energy spectrum method (ESM) [
35] wind direction retrieval algorithm is used to obtain high-precision direction parameters. To reduce the influence of co-frequency interference on the analysis of the sea surface wind field, a 2D nonlinear smoothing median filter with a
template is applied to the measured radar images.
where
is the image echo intensity value of the radar image pixel point at the polar coordinate position
;
is the gray value of the filtered image in the polar coordinate position
;
is the pixel point of the center point at
; and
takes eight points centered on
. The template center of the
template median filter is overlapped with the pixel position of the polar coordinate image, and the template traverses the full radar image to obtain the median filtered image sequence, as shown in
Figure 9.
The color bar represents the 13-bit pixel intensity; red means the highest pixel intensity, and blue means the lowest pixel intensity.
Figure 9 is a polar coordinate image. The range of
ρ is 0 to 2500 m, and the range of
θ is 0 to 360°. Then, a new polar coordinate image is established to obtain a normalized new polar coordinate image. Based on the characteristics of the static frequency of sea surface wind streaks, the normalized radar image sequence is integrated and averaged at the pixel points at the same position according to the specified compensation time.
where
is the wind streaks image;
is the single radar image of the radar image sequence time
; and
is the time series. The gray value of the new pixel after low-pass filtering is assigned to the newly constructed two-dimensional polar coordinate image according to the position, and the two-dimensional polar coordinate sea surface static feature image is obtained.
The two-dimensional polar coordinate image is divided into small regions, and the polar coordinates of each small region are interpolated into the established Cartesian coordinates by using the nearest point. The two-dimensional image is then transformed into a two-dimensional discrete fast Fourier transform (2D-FFT) to obtain the energy spectrum of the sea surface static feature image.
where
is the Fourier coefficient of the sea surface static feature image;
and
are the number of pixels of
and
axes in the spatial domain of sea surface static feature image in Cartesian coordinates. Wavenumber energy spectrum scale separation is applied to the energy spectrum of static feature images. The upper and lower limits of the wind streak energy spectrum beam are calculated according to the relationship between the wind streak wavelength
and the frequency domain coordinate scale
. The wind streak signal energy spectrum is extracted using the energy spectrum bandpass filter. The mathematical model is
where
represents the energy spectrum of wind streaks.
Figure 10 is the energy spectrum of the wind streak contour obtained by
in
coordinates after wavenumber scale separation. The imaginary line is the wavelength range in
coordinates.
In
Figure 10,
and
represent the horizontal and vertical coordinates of the beam domain. The energy concentration area is the red area, the yellow area is the area with higher energy, and the blue area is the area with lower energy. The direction of the line connecting the two energy concentration areas is the vertical direction of the wind streak and the north-facing sea surface wind direction
of each subregion can be obtained. The main wind direction
of the sea surface can be determined as follows:
3.3. Combining Anemometer and Radar Results
The RF wind direction is constrained by the measurement data of the wind direction retrieved from the marine radar image. Since the wind direction obtained by the ESM algorithm has a standard deviation of 8.29°, it can be assumed that the wind direction measured by the radar has an uncertainty of . Therefore, in the range of the wind direction constraint angle measured by radar, the output of the RF wind direction in this range is divided into one group every 5° for groups in total.
In the range of
, the cost function of each group of RF wind direction
and radar-measured wind direction
are calculated.
where
is the
j-th group of the RF wind direction;
. In this paper, in the range of
, the pair of estimates with the smallest cost function in the group is taken as the optimal wind parameters estimation output of the RCRF algorithm.
5. Conclusions
Based on the data obtained from CFD numerical simulations, further research was conducted to address the issue of reducing wind parameter estimation errors for multiple anemometers on ships. The method of estimating wind parameters by combining anemometer and X-band marine radar data was proposed. This algorithm was verified with 8640 sets of wind field simulation data, and the main innovations of this paper are as follows:
A multivariate bias strategy based on the simulation database of the different monitoring points is proposed to obtain the optimal layout scheme in the case of a multi-anemometer arrangement on the ship surface.
An improvement scheme for ship steady-state wind field estimation technology based on the random forest algorithm is proposed using the simulation data of a multi-anemometer optimal layout scheme.
The wind direction retrieved by radar is combined with the anemometer-estimated value obtained from the random forest algorithm to acquire more accurate steady-state wind parameters on the ship’s surface .
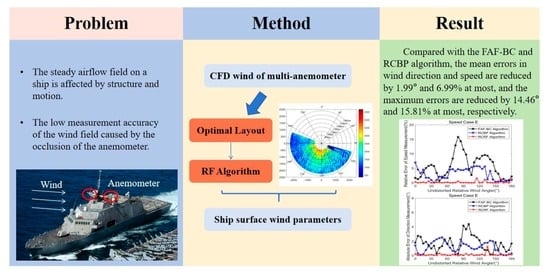
Under the ideal simulation conditions, compared with the FAF-BC algorithm, the mean of the RCRF algorithm is decreased by 5.17%, and the maximum is decreased by 15.81% at most; the mean of the RCRF algorithm is decreased by 1.18°, and the maximum is decreased by 2.96° at most. Under the noise condition, the mean of the RCRF algorithm is enhanced by 6.09%, and the maximum value can be decreased by 14.35% at most; the mean is improved by 1.59°, and the maximum is improved by 4.22° at most. Under the temporal uncertainty combined with noise condition, the mean of the RCRF algorithm is reduced by 6.99%, and the maximum can be enhanced by 14.46% at most; the mean is decreased by 1.99°, and the maximum is reduced by 15.23° at most. Compared with the FAF-BC algorithm, the RCRF algorithm greatly improves the estimation accuracy of wind parameters. This algorithm is more robust under different noise cases, and an excellent anti-noise ability is demonstrated in the RCRF algorithm.
Additionally, numerical simulation data are used in this paper, and there is a lack of actual sea trial experimental data for verifying the RCRF algorithm. In the future, actual sea data will be used to further study the wind parameter estimation of multiple anemometers.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}