
Determination of the Optimal Mounting Depth for Calculating Effective Soil Temperature at L-Band: Maqu Case


Abstract
:
1. Introduction
1.1. Motivation
1.2. Background
2. Methodology and Data
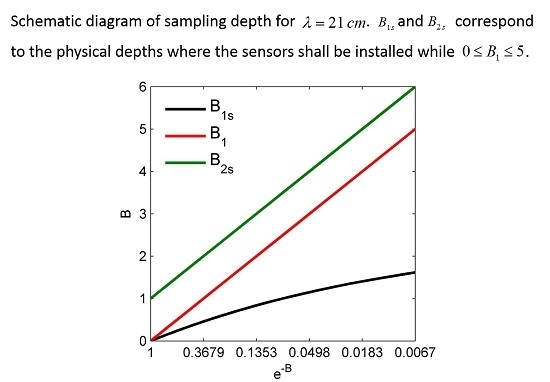
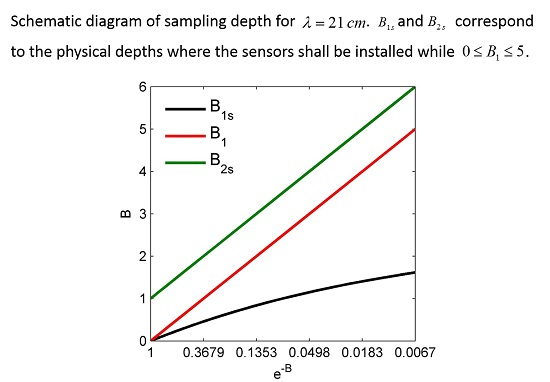
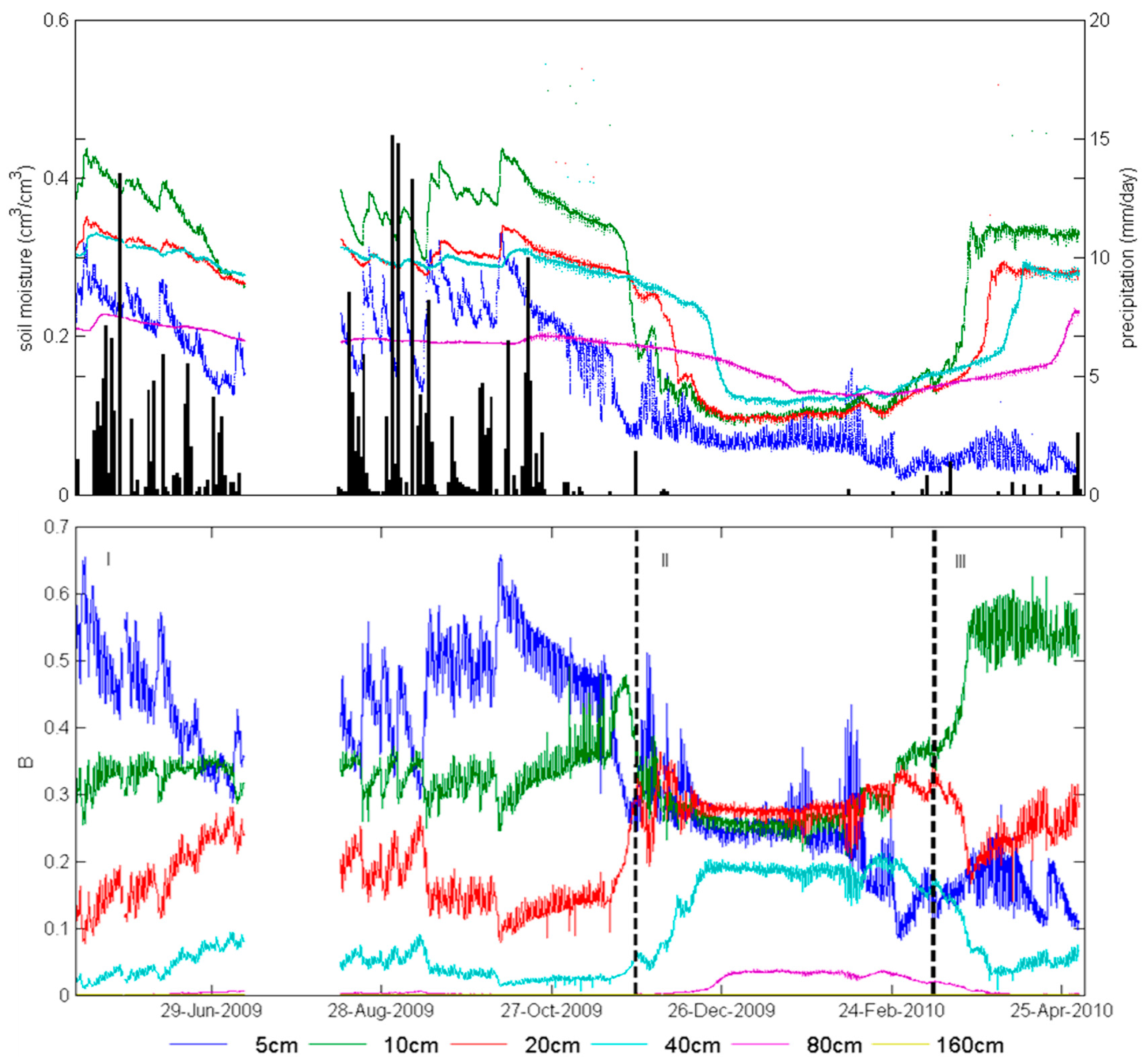
2.1. Characteristics of Parameter B
- (1)
- matches the layer-averaged soil temperature integrated from the surface to the sampling depth , which is used for calculating (see Equation (3));
- (2)
- matches the layer-averaged soil temperature integrated from the sampling depth to the infinite, as in Equation (2).
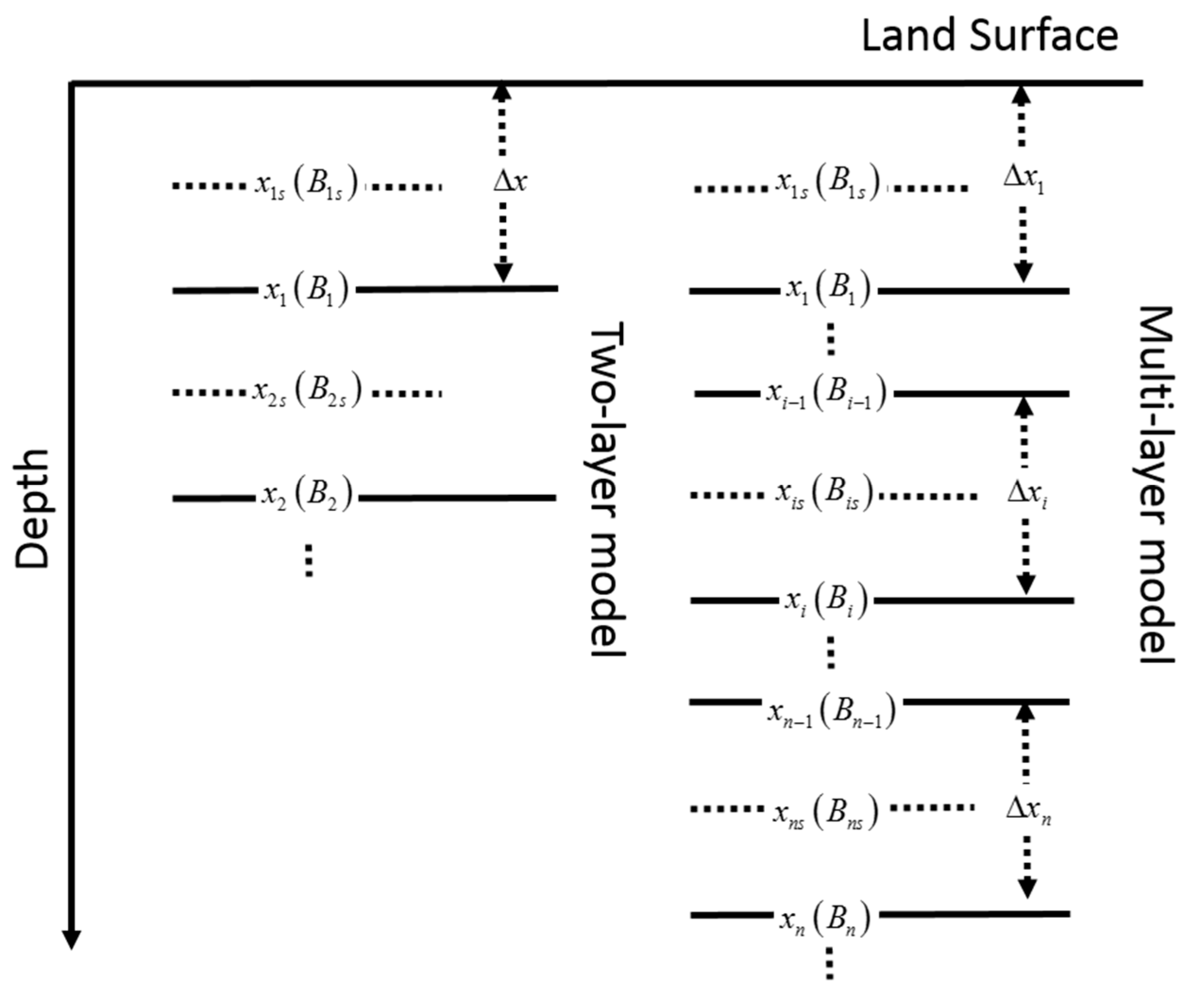
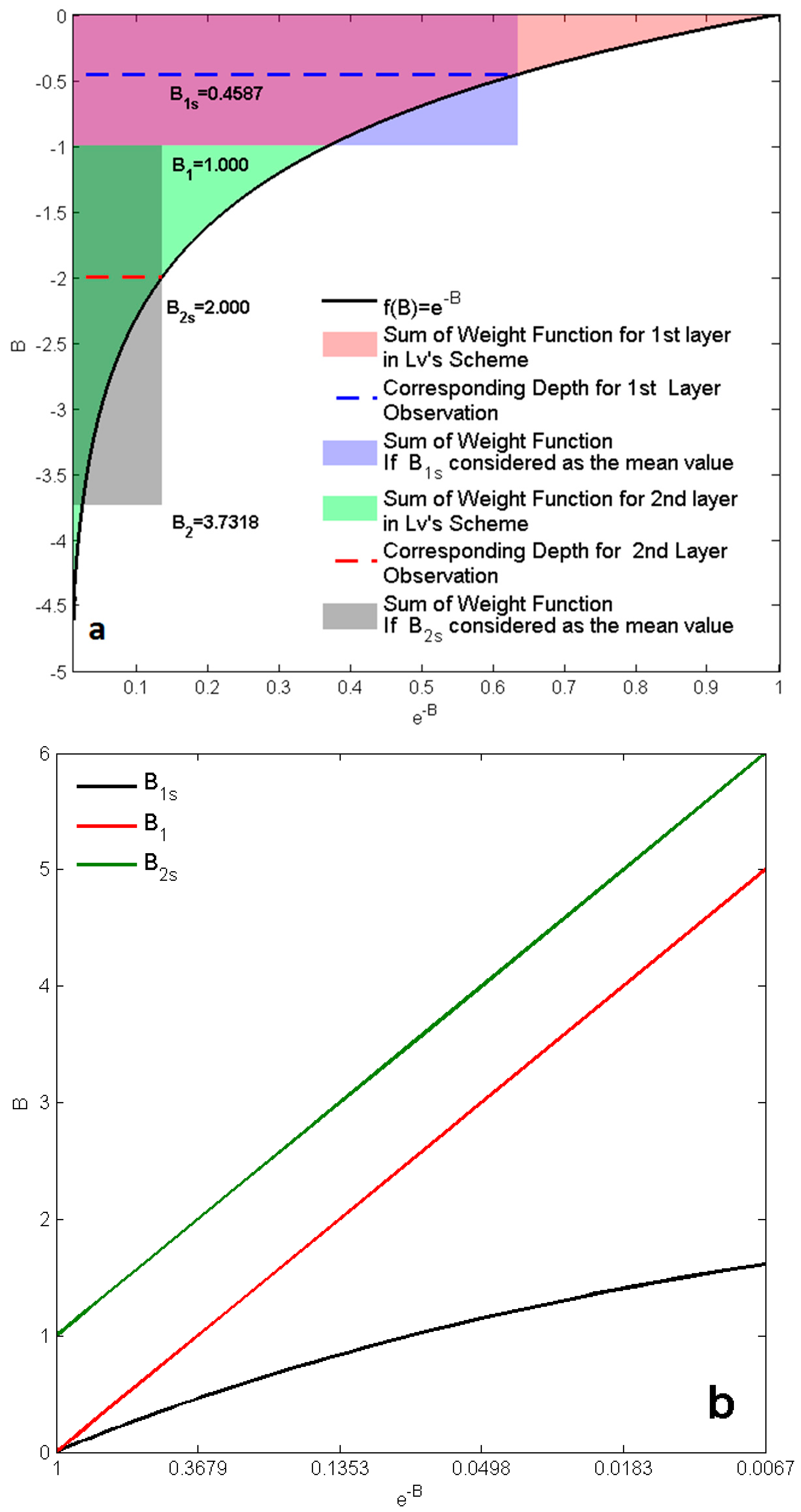
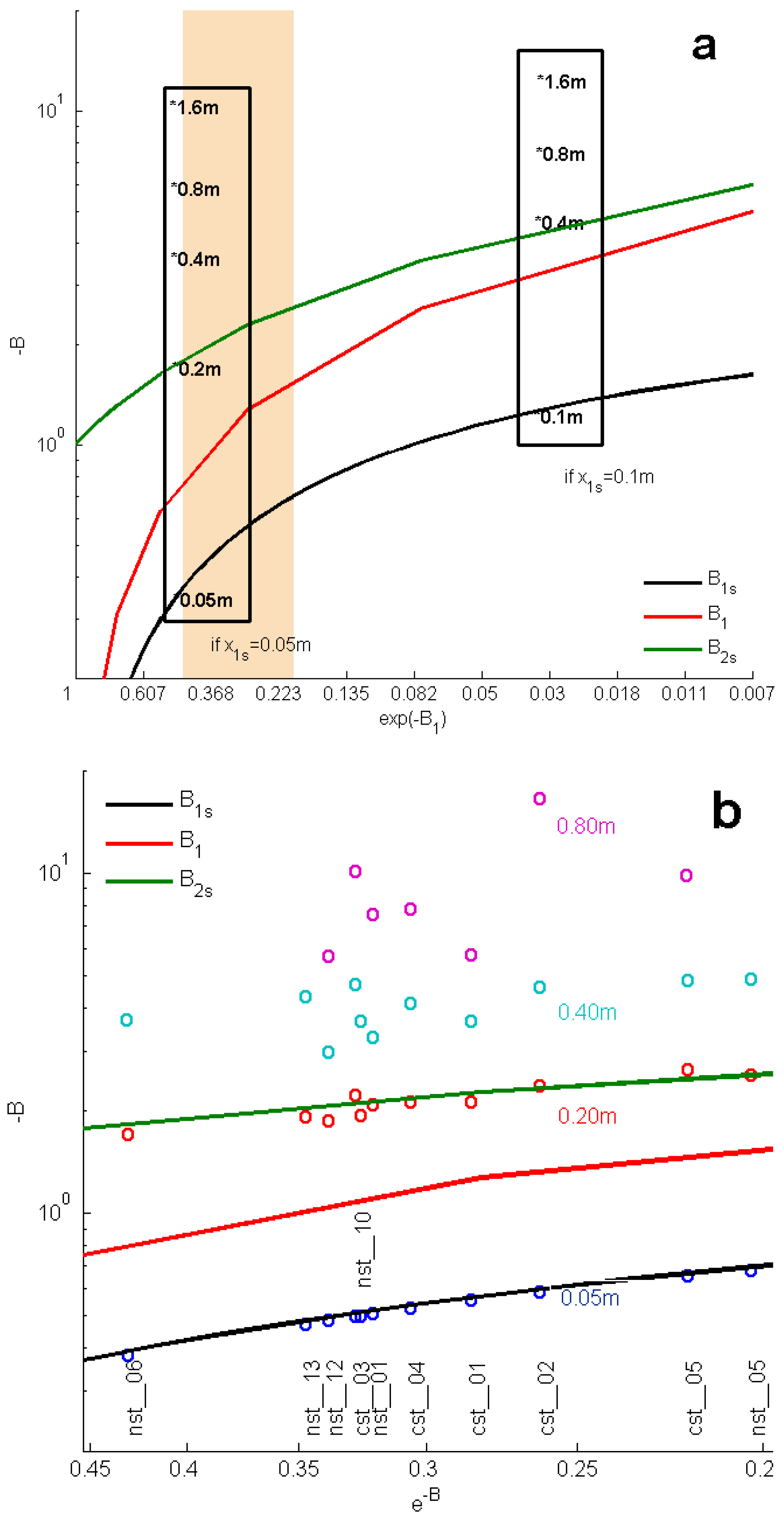
2.2. Optimal Mounting Depth
- (1)
- Using SM/ST observation at first layer () to calculate with ;
- (2)
- Using to calculate and with Equation (8);
- (2)
- Determining the optimal sampling depth for the second layer with again.
2.3. The Maqu Network
3 Results
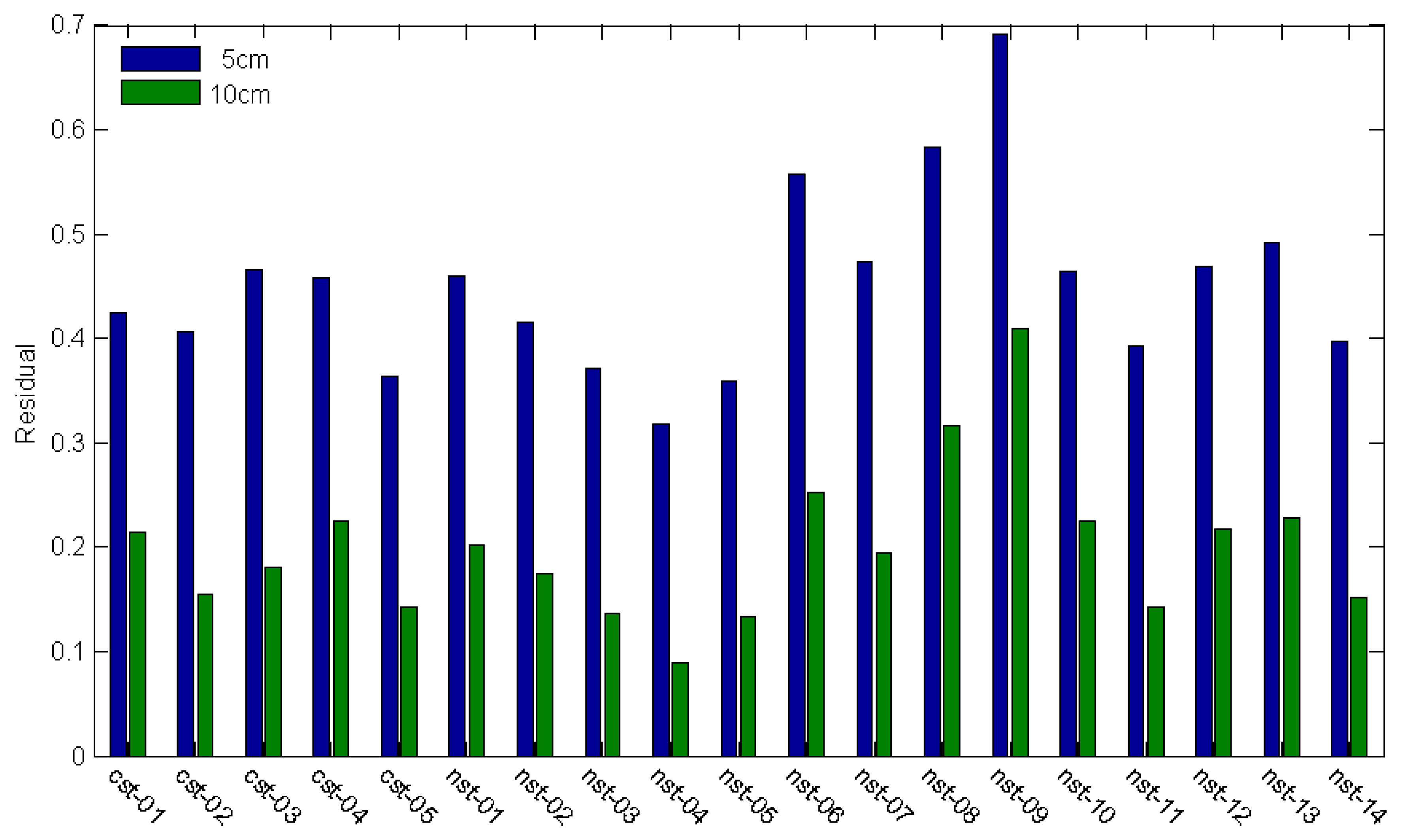
3.1. Evaluation of Installation Configuration
3.2. Test of the Optimal Mounting Depth
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Su, Z.; de Rosnay, P.; Wen, J.; Wang, L.; Zeng, Y. Evaluation of ECMWF’s soil moisture analyses using observations on the Tibetan Plateau. J. Geophys. Res. Atmos. 2013, 118, 5304–5318. [Google Scholar] [CrossRef]
- Van den Hurk, B.; Best, M.; Dirmeyer, P.; Pitman, A.; Polcher, J.; Santanello, J. Acceleration of land surface model development over a decade of glass. Bull. Am. Meteorol. Soc. 2011, 92, 1593–1600. [Google Scholar] [CrossRef]
- Seneviratne, S.I.; Corti, T.; Davin, E.L.; Hirschi, M.; Jaeger, E.B.; Lehner, I.; Orlowsky, B.; Teuling, A.J. Investigating soil moisture-climate interactions in a changing climate: A review. Earth Sci. Rev. 2010, 99, 125–161. [Google Scholar] [CrossRef]
- Koster, R.D.; Suarez, M.J.; Higgins, R.W.; Van den Dool, H.M. Observational evidence that soil moisture variations affect precipitation. Geophys. Res. Lett. 2003, 30. [Google Scholar] [CrossRef]
- Zhang, J.Y.; Wu, L.Y.; Dong, W.J. Land-atmosphere coupling and summer climate variability over East Asia. J. Geophys. Res. Atmos. 2011, 116. [Google Scholar] [CrossRef]
- Overpeck, J.T. Climate science: The challenge of hot drought. Nature 2013, 503, 350–351. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.-E.; Hong, S.-Y. Impact of soil moisture anomalies on summer rainfall over East Asia: A regional climate model study. J. Clim. 2007, 20, 5732–5743. [Google Scholar] [CrossRef]
- Santanello, J.A.; Peters-Lidard, C.D.; Kumar, S.V. Diagnosing the sensitivity of local land-atmosphere coupling via the soil moisture-boundary layer interaction. J. Hydrometeorol. 2011, 12, 766–786. [Google Scholar] [CrossRef]
- Frye, J.D.; Mote, T.L. Convection initiation along soil moisture boundaries in the southern great plains. Mon. Weather Rev. 2010, 138, 1140–1151. [Google Scholar] [CrossRef]
- Van den Hurk, B.; van Meijgaard, E. Diagnosing land-atmosphere interaction from a regional climate model simulation over West Africa. J. Hydrometeorol. 2010, 11, 467–481. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Waldteufel, P.; Richaume, P.; Wigneron, J.P.; Ferrazzoli, P.; Mahmoodi, A.; Al Bitar, A.; Cabot, F.; Gruhier, C.; Juglea, S.E.; et al. The smos soil moisture retrieval algorithm. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1384–1403. [Google Scholar] [CrossRef]
- Panciera, R.; Walker, J.P.; Kalma, J.D.; Kim, E.J.; Saleh, K.; Wigneron, J.P. Evaluation of the SMOS L-MEB passive microwave soil moisture retrieval algorithm. Remote Sens. Environ. 2009, 113, 435–444. [Google Scholar] [CrossRef]
- Wigneron, J.P.; Schwank, M.; Baeza, E.L.; Kerr, Y.; Novello, N.; Millan, C.; Moisy, C.; Richaume, P.; Mialon, A.; Al Bitar, A.; et al. First evaluation of the simultaneous SMOS and ELBARA-II observations in the Mediterranean region. Remote Sens. Environ. 2012, 124, 26–37. [Google Scholar] [CrossRef]
- Wigneron, J.P.; Chanzy, A.; Kerr, Y.H.; Lawrence, H.; Shi, J.C.; Escorihuela, M.J.; Mironov, V.; Mialon, A.; Demontoux, F.; de Rosnay, P.; et al. Evaluating an improved parameterization of the soil emission in L-MEB. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1117–1189. [Google Scholar] [CrossRef]
- England, A.W. Thermal microwave emission from a scattering layer. J. Geophys. Res. 1975, 80, 4484–4496. [Google Scholar] [CrossRef]
- Wigneron, J.P.; Kerr, Y.; Waldteufel, P.; Saleh, K.; Escorihuela, M.J.; Richaume, P.; Ferrazzoli, P.; de Rosnay, P.; Gurney, R.; Calvet, J.C.; et al. L-band microwave emission of the biosphere (L-MEB) model: Description and calibration against experimental data sets over crop fields. Remote Sens. Environ. 2007, 107, 639–655. [Google Scholar] [CrossRef]
- Holmes, T.R.H.; de Rosnay, P.; de Jeu, R.; Wigneron, R.J.P.; Kerr, Y.; Calvet, J.C.; Escorihuela, M.J.; Saleh, K.; Lemaitre, F. A new parameterization of the effective temperature for l band radiometry. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- De Rosnay, P.; Wigneron, J.; Holmes, T.; Calvet, J. Parameterizations of the effective temperature for L-band radiometry. Inter-comparison and long term validation with SMOSREX field experiment. In Thermal Microwave Radiation-Applications for Remote Sensing; Mätzler, C., Rosenkranz, P.W., Battaglia, A., Wigneron, J.P., Eds.; IET Electromagnetic Waves Series 52; The Institution of Engineering and Technology: London, UK, 2006; pp. 312–323. [Google Scholar]
- Wilheit, T.T. Radiative-transfer in a plane stratified dielectric. IEEE Trans. Geosci. Remote Sens. 1978, 16, 138–143. [Google Scholar] [CrossRef]
- Lv, S.; Wen, J.; Zeng, Y.; Tian, H.; Su, Z. An improved two-layer algorithm for estimating effective soil temperature in microwave radiometry using in situ temperature and soil moisture measurements. Remote Sens. Environ. 2014, 152, 356–363. [Google Scholar] [CrossRef]
- Mironov, V.L.; Dobson, M.C.; Kaupp, V.H.; Komarov, S.A.; Kleshchenko, V.N. Generalized refractive mixing dielectric model for moist soils. IEEE Trans. Geosci. Remote Sens. 2004, 42, 773–785. [Google Scholar] [CrossRef]
- Bancerek, G. The fundamental properties of natural numbers. Formaliz. Math. 1990, 1, 41–46. [Google Scholar]
- Zeng, Y.J.; Wan, L.; Su, Z.B.; Saito, H.; Huang, K.L.; Wang, X.S. Diurnal soil water dynamics in the shallow vadose zone (field site of China University of Geosciences, China). Environ. Geol. 2009, 58, 11–23. [Google Scholar] [CrossRef]
- Zeng, Y.; Su, Z.; Wan, L.; Yang, Z.; Zhang, T.; Tian, H.; Shi, X.; Wang, X.; Cao, W. Diurnal pattern of the drying front in desert and its application for determining the effective infiltration. Hydrol. Earth Syst. Sci. 2009, 13, 703–714. [Google Scholar] [CrossRef]
- Hillel, D. Introduction to Environmental Soil Physics; Academic Press: Cambridge, MA, USA, 2003. [Google Scholar]
- Owe, M.; Van de Griend, A.A. Comparison of soil moisture penetration depths for several bare soils at two microwave frequencies and implications for remote sensing. Water Resour. Res. 1998, 34, 2319–2327. [Google Scholar] [CrossRef] [Green Version]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing Active and Passive-Volume III: From Theory to Applications; Artech House, Inc.: Dedham, MA, USA, 1986. [Google Scholar]
- Zheng, D.; van der Velde, R.; Su, Z.; Booij, M.J.; Hoekstra, A.Y.; Wen, J. Assessment of roughness length schemes implemented within the noah land surface model for high-altitude regions. J. Hydrometeorol. 2014, 15, 921–937. [Google Scholar] [CrossRef]
- Dente, L.; Ferrazzoli, P.; Su, Z.; van der Velde, R.; Guerriero, L. Combined use of active and passive microwave satellite data to constrain a discrete scattering model. Remote Sens. Environ. 2014, 155, 222–238. [Google Scholar] [CrossRef]
- Dente, L.; Vekerdy, Z.; Wen, J.; Su, Z. Maqu network for validation of satellite-derived soil moisture products. Int. J. Appl. Earth Obs. Geoinform. 2012, 17, 55–65. [Google Scholar] [CrossRef]
- Dente, L.; Su, Z.B.; Wen, J. Validation of SMOS soil moisture products over the Maqu and Twente regions. Sensors 2012, 12, 9965–9986. [Google Scholar] [CrossRef] [PubMed]
- Dente, L.; Vekerdy, Z.; de Jeu, R.; Su, Z. Seasonality and autocorrelation of satellite-derived soil moisture products. Int. J. Remote Sens. 2013, 34, 3231–3247. [Google Scholar] [CrossRef]
- Su, Z.; Wen, J.; Dente, L.; van der Velde, R.; Wang, L.; Ma, Y.; Yang, K.; Hu, Z. The Tibetan Plateau observatory of plateau scale soil moisture and soil temperature (Tibet-Obs) for quantifying uncertainties in coarse resolution satellite and model products. Hydrol. Earth Syst. Sci. 2011, 15, 2303–2316. [Google Scholar] [CrossRef]
- Holmes, T.R.H.; Drusch, M.; Wigneron, J.P.; de Jeu, R.A.M. A global simulation of microwave emission: Error structures based on output from ecmwf’s operational integrated forecast system. IEEE Trans. Geosci. Remote Sens. 2008, 46, 846–856. [Google Scholar] [CrossRef]
- Zeng, Y.; Su, Z.; Wan, L.; Wen, J. Numerical analysis of air-water-heat flow in the unsaturated soil is it necessary to consider air flow in land surface models. J. Geophys. Res. Atmos. 2011, 116. [Google Scholar] [CrossRef]
- Zeng, Y.; Su, Z.; Wan, L.; Wen, J. A simulation analysis of advective effect on evaporation using a two-phase heat and mass flow model. Water Resour. Res. 2011, 47. [Google Scholar] [CrossRef]
- SMAP Algorithm Development Team and SMAP Science Team. Ancillary Data Report—Surface Temperature Version 2; SMAP Science Document No. 051; Jet Propulsion Laboratory: Pasadena, CA, USA, 2015. [Google Scholar]
- Zeng, Y.; Su, Z.; Schulz, J.; Calvet, J.-C.; Poli, P.; Tan, D.; Swinnen, E.; Manninen, T.; Riihelä, A.; Tanis, C.-M.; et al. Analysis of current validation practices in europe for space-based climate data records of essential climate variables. Int. J. Appl. Earth Obs. Geoinform. 2015, 42, 150–161. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | The First Layer | Middle Layers | The Deepest Layer |
|---|---|---|---|
| , is the physical depth interval. Soil moisture/temperature are from the ith layer as well. | |||
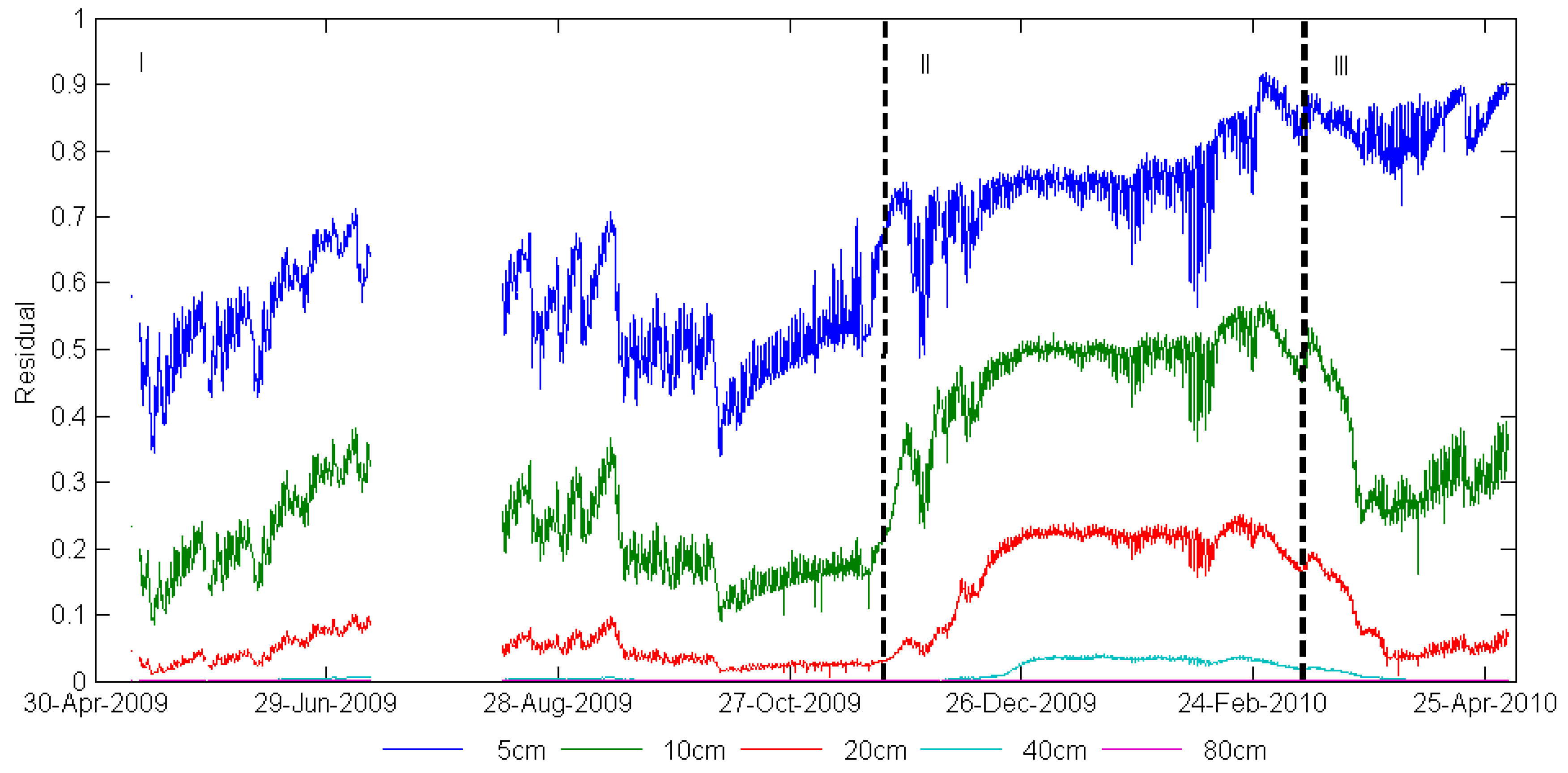
| Residual | |||
| Weight Function | |||
| B | Δx | Soil Moisture | Soil Temperature |
|---|---|---|---|
| , the mounting depths of sensors in the first layer | The first layer samples | The first layer samples | |
| , deduced from | Layer-averaged (1st layer) | Layer-averaged (1st layer) | |
| , the mounting depths of sensors in the second layer | The second layer samples | The second layer samples | |
| Not necessarily defined | Not necessarily defined | Not necessarily defined |
| Configuration | 5 cm/10 cm | 5 cm/20 cm | 5 cm/40 cm | 5 cm/80 cm | 5 cm/160 cm | 10 cm/20 cm | 10 cm/40 cm | 10 cm/80 cm |
|---|---|---|---|---|---|---|---|---|
| Residual | 0.311 | 0.074 | 0.039 | 0 | ~ | 0.034 | 0.002 | ≈0 |
| Weight function for the first layer | 0.496 | 0.496 | 0.496 | 0.496 | 0.496 | 0.950 | 0.950 | 0.950 |
| −0.067 | 0.943 | 2.907 | 5.367 | 10.442 | −0.610 | 1.374 | 4.168 | |
| Correlation Coefficient | 0.9951 | 0.9981 | 0.9900 | 0.9700 | 0.9572 | 0.9876 | 0.9884 | 0.9880 |
| RMSE(K) | 0.93 | 0.44 | 1.12 | 1.77 | 2.46 | 1.09 | 1.02 | 1.05 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, S.; Zeng, Y.; Wen, J.; Zheng, D.; Su, Z. Determination of the Optimal Mounting Depth for Calculating Effective Soil Temperature at L-Band: Maqu Case. Remote Sens. 2016, 8, 476. https://0-doi-org.brum.beds.ac.uk/10.3390/rs8060476
Lv S, Zeng Y, Wen J, Zheng D, Su Z. Determination of the Optimal Mounting Depth for Calculating Effective Soil Temperature at L-Band: Maqu Case. Remote Sensing. 2016; 8(6):476. https://0-doi-org.brum.beds.ac.uk/10.3390/rs8060476
Chicago/Turabian StyleLv, Shaoning, Yijian Zeng, Jun Wen, Donghai Zheng, and Zhongbo Su. 2016. "Determination of the Optimal Mounting Depth for Calculating Effective Soil Temperature at L-Band: Maqu Case" Remote Sensing 8, no. 6: 476. https://0-doi-org.brum.beds.ac.uk/10.3390/rs8060476