
Automated Subpixel Surface Water Mapping from Heterogeneous Urban Environments Using Landsat 8 OLI Imagery


Abstract
:
1. Introduction
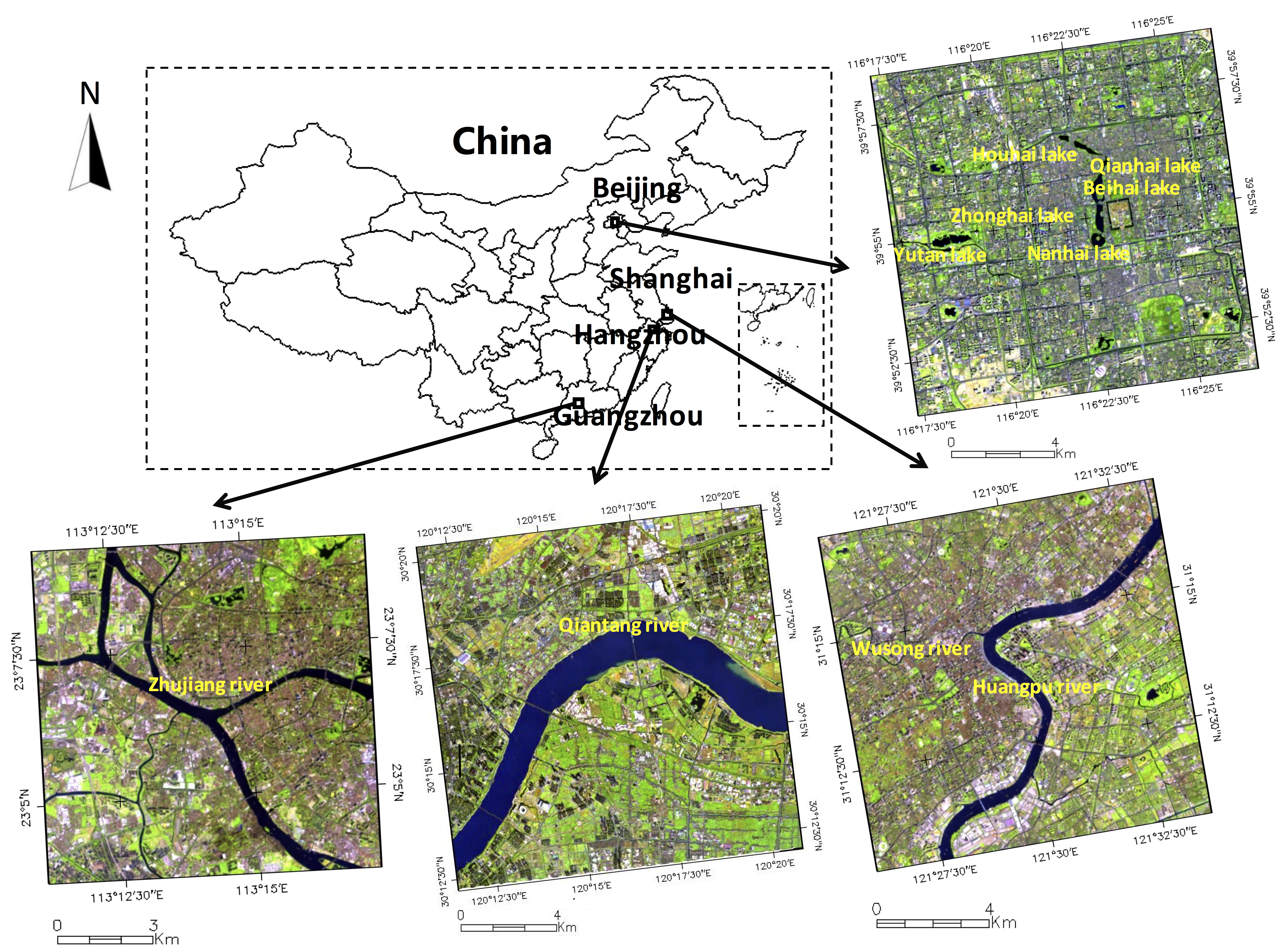
2. Study Areas and Data Sources
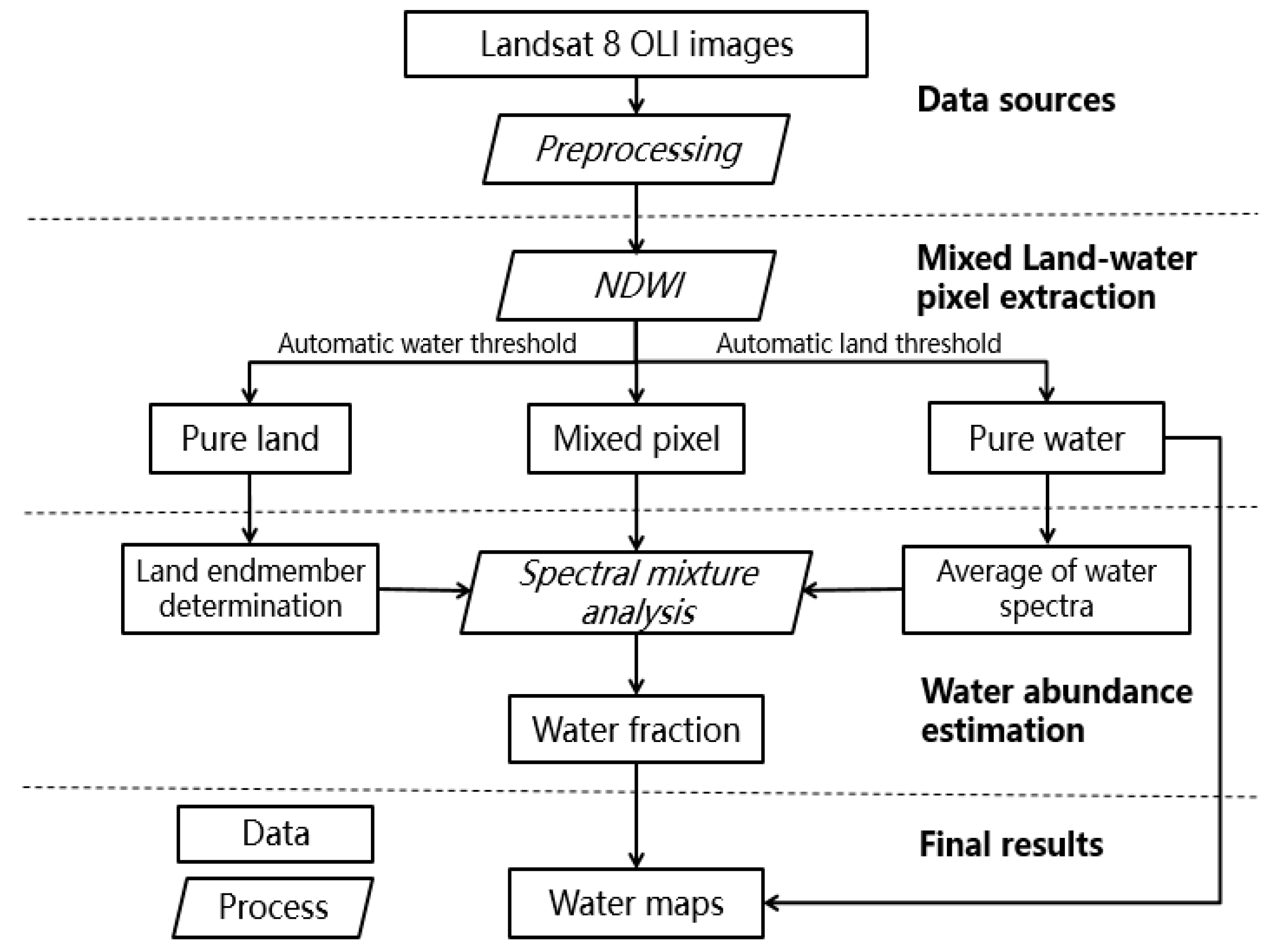
3. Methodology
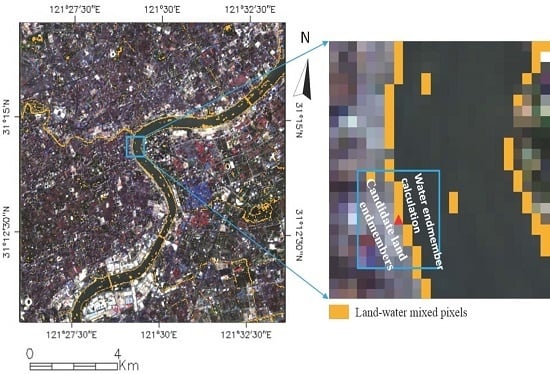
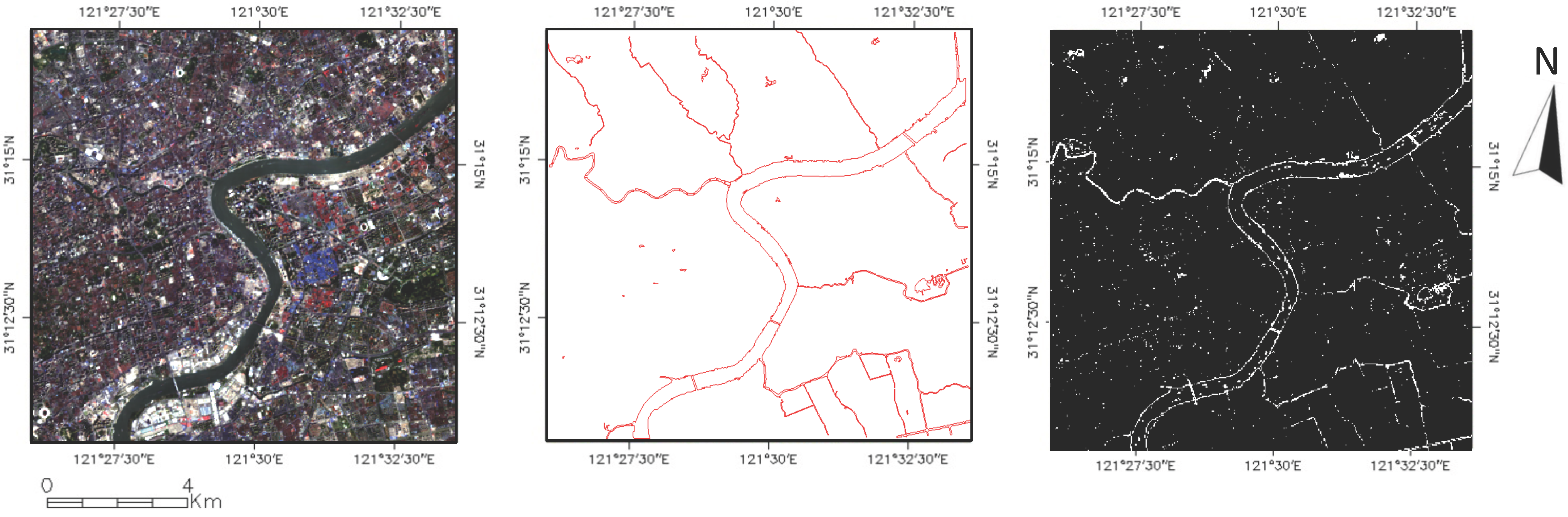
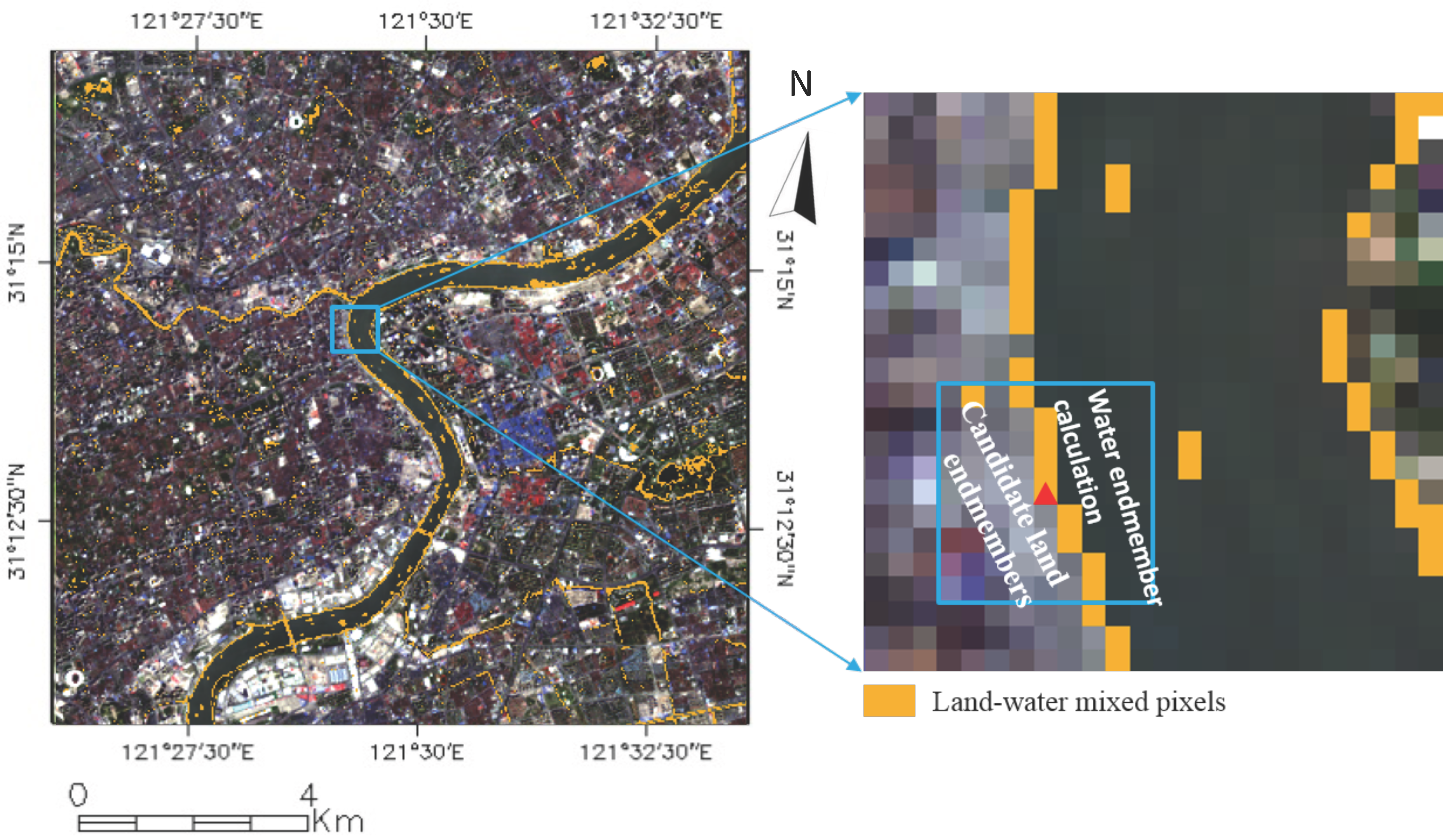
3.1. Automatic Mixed Land-Water Pixel Extraction
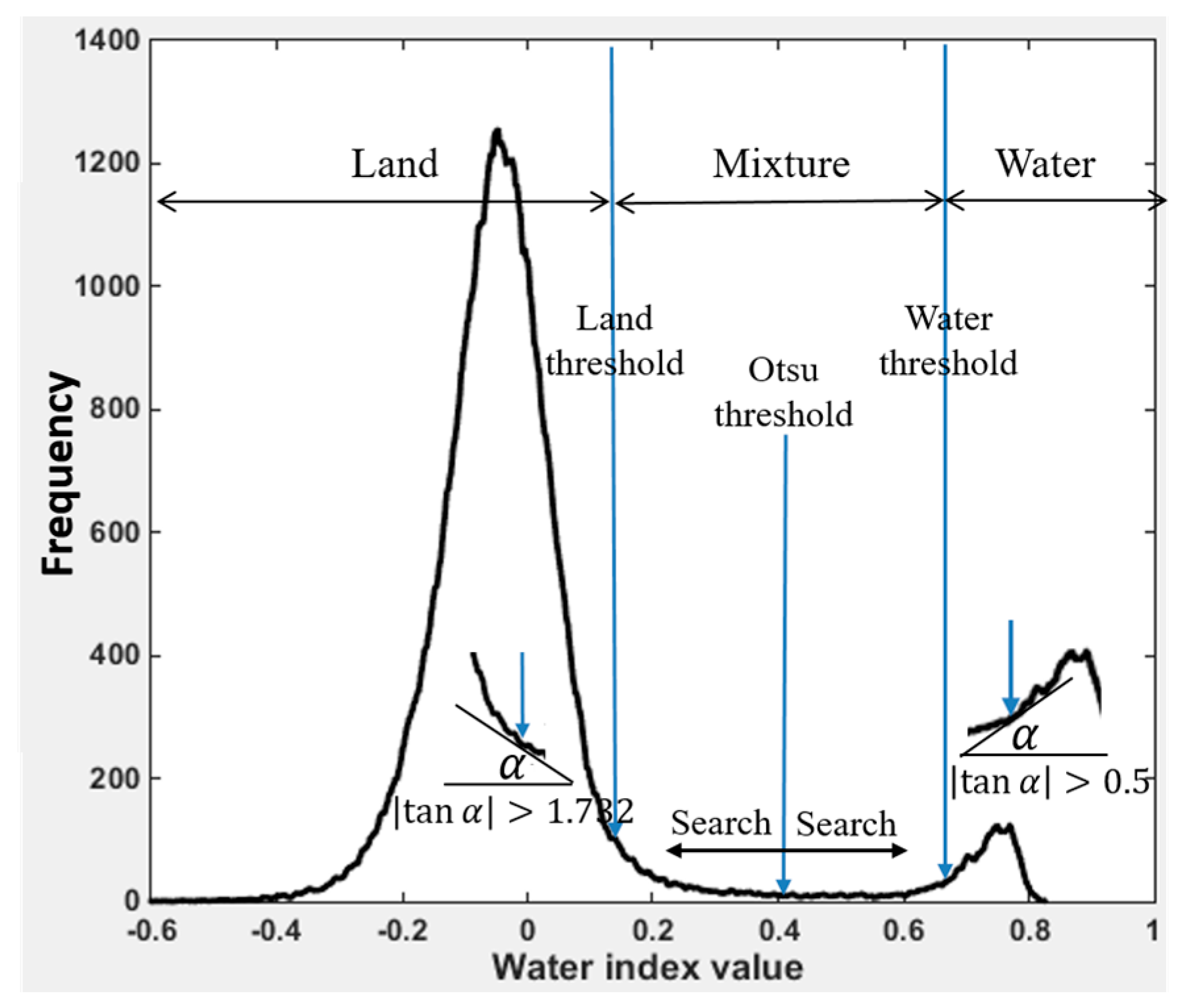
3.1.1. Normalized Difference Water Index (NDWI) Calculation
3.1.2. Initial Extraction of Water Pixels and Land Pixels
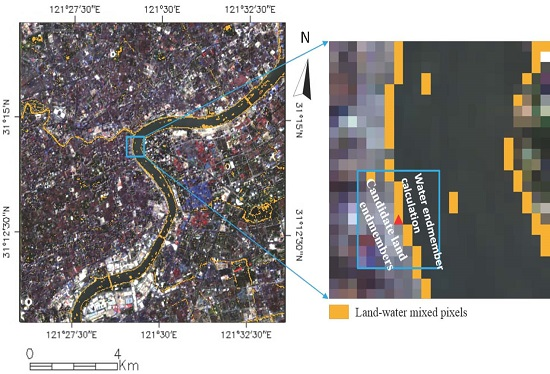
3.1.3. Automated Mixed Land-Water Pixel Extraction
3.1.4. Misclassification Removal by Simple Post-Processing
3.2. Endmember Determination by Local Spatial Information
3.3. Linear Unmixing Method
3.4. Accuracy Assessment
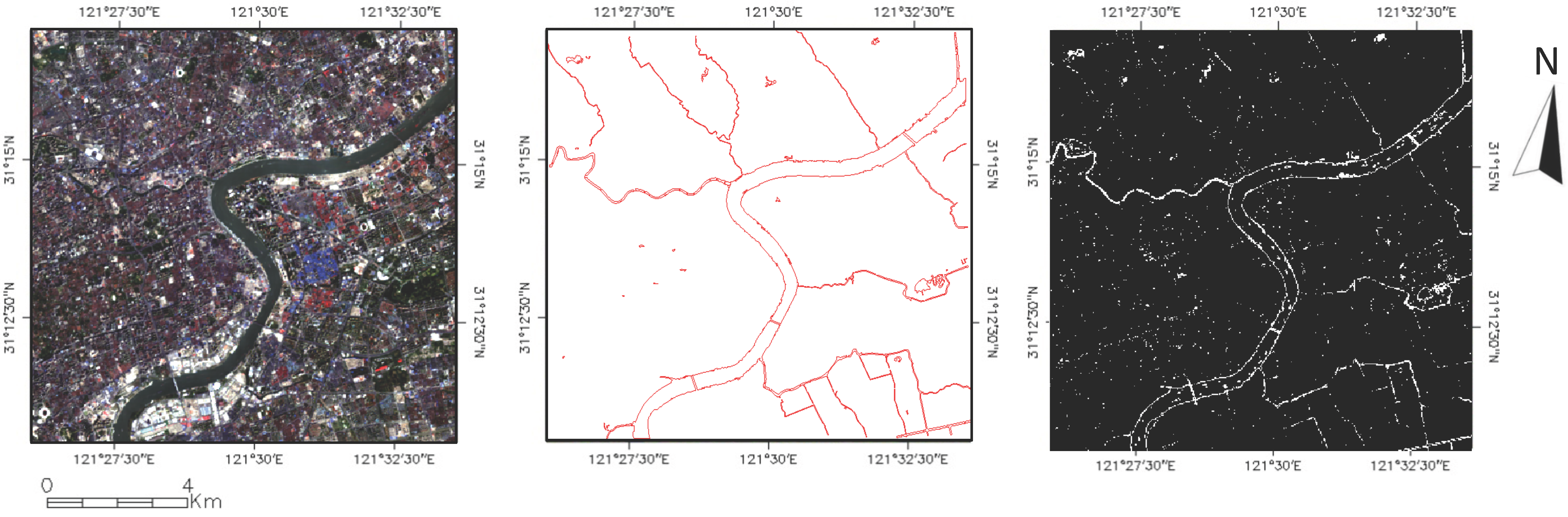
4. Results
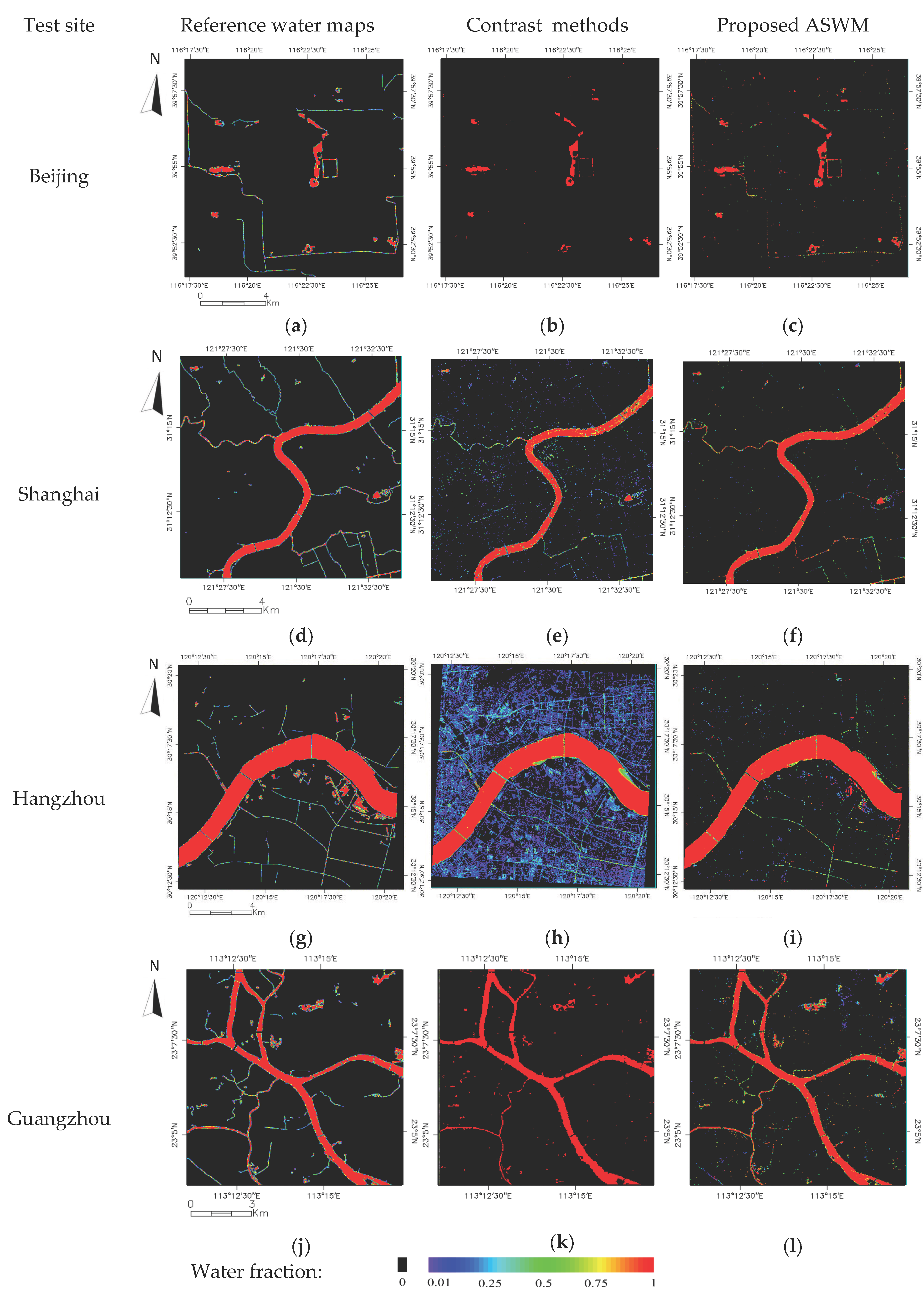
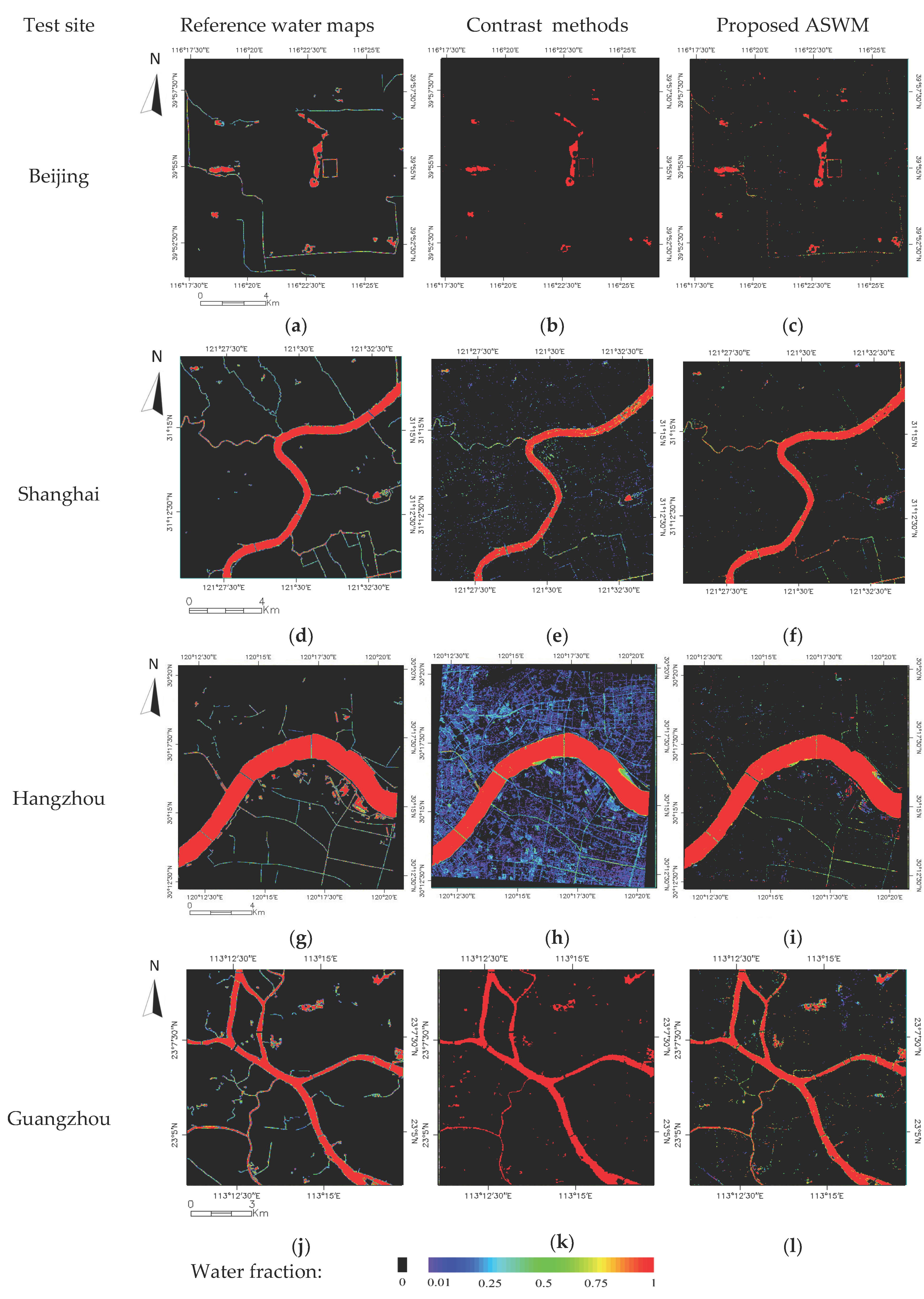
4.1. Water Maps from the Different Methods
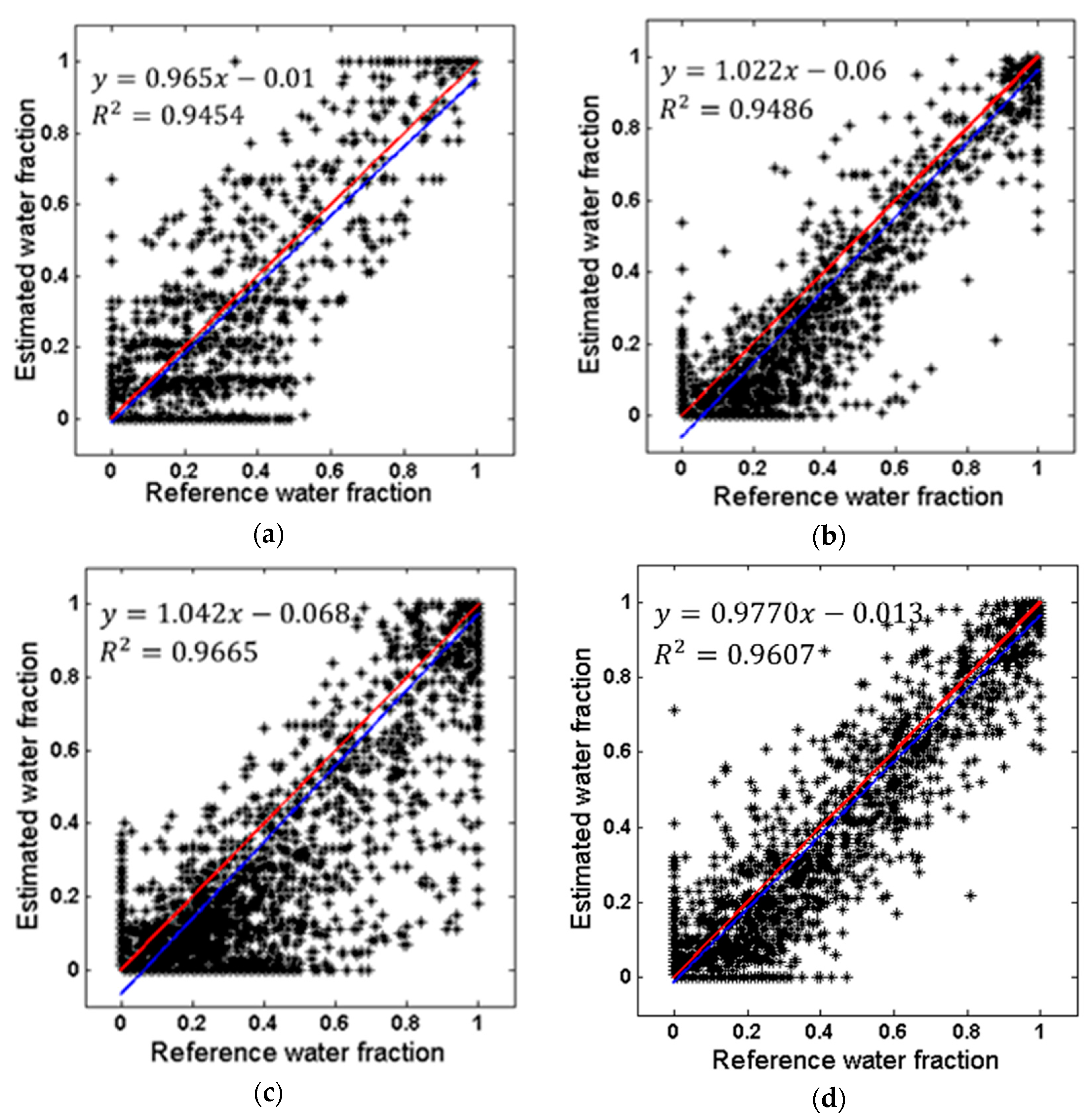
4.2. Accuracy Assessment Results
5. Discussion
5.1. Mixed Land-Water Pixel Extraction
5.2. Endmember Selection
5.3. Error Analysis
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Proud, S.R.; Fensholt, R.; Rasmussen, L.V.; Sandholt, I. Rapid response flood detection using the MSG geostationary satellite. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2011, 13, 536–544. [Google Scholar] [CrossRef]
- Feng, L.; Hu, C.M.; Chen, X.L.; Li, R.F.; Tian, L.Q.; Murch, B. MODIS observations of the bottom topography and its inter-annual variability of Poyang Lake. Remote Sens. Environ. 2011, 115, 2729–2741. [Google Scholar] [CrossRef]
- Prigent, C.; Papa, F.; Aires, F.; Jiménez, C.; Rossow, W.B.; Matthews, E. Changes in land surface water dynamics since the 1990s and relation to population pressure. Geophys. Res. Lett. 2012, 39, 85–93. [Google Scholar] [CrossRef]
- Güttler, F.N.; Niculescu, S.; Gohin, F. Turbidity retrieval and monitoring of Danube Delta waters using multi-sensor optical remote sensing data: An integrated view from the delta plain lakes to the western–northwestern Black Sea coastal zone. Remote Sens. Environ. 2013, 132, 86–101. [Google Scholar] [CrossRef]
- Tong, X.; Xie, H.; Qiu, Y.; Zhang, H.; Song, L.; Zhang, Y.; Zhao, J. Quantitative monitoring of inland water using remote sensing: An example of upper reaches of Huangpu River, China. Int. J. Remote Sens. 2010, 31, 2471–2492. [Google Scholar] [CrossRef]
- Ekercin, S. Coastline change assessment at the Aegean Sea Coasts in Turkey using multitemporal Landsat imagery. J. Coast. Res. 2009, 23, 691–698. [Google Scholar] [CrossRef]
- Pardo-Pascual, J.E.; Almonacid-Caballer, J.; Ruiz, L.A.; Palomar-Vazquez, J. Automatic extraction of shorelines from Landsat TM and ETM multi-temporal images with subpixel precision. Remote Sens. Environ. 2012, 123, 1–11. [Google Scholar] [CrossRef]
- Hung, M.C.; Wu, Y.H. Mapping and visualizing the Great Salt Lake landscape dynamics using multi-temporal satellite images, 1972–1996. Int. J. Remote Sens. 2005, 26, 1815–1834. [Google Scholar] [CrossRef]
- Tulbure, M.G.; Broich, M. Spatiotemporal dynamic of surface water bodies using Landsat time-series data from 1999 to 2011. ISPRS J. Photogramm. 2013, 79, 44–52. [Google Scholar] [CrossRef]
- Bryant, R.G.; Rainey, M.P. Investigation of flood inundation on playas within the Zone of Chotts, using a time-series of AVHRR. Remote Sens. Environ. 2002, 82, 360–375. [Google Scholar] [CrossRef]
- Jain, S.K.; Singh, R.D.; Jain, M.K.; Lohani, A.K. Delineation of flood-prone areas using remote sensing technique. Water Resour. Manag. 2005, 19, 337–347. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of normalized difference water index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Feyisa, G.L.; Meilby, H.; Fensholt, R.; Proud, S.R. Automated Water Extraction Index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Xie, H.; Luo, X.; Xu, X.; Tong, X.; Jin, Y.; Pan, H.; Tong, X. New hyperspectral difference water index for the extraction of urban water bodies by the use of airborne hyperspectral images. J. Appl. Remote Sen. 2014, 8, 5230–5237. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, Y.; Zhou, M.; Zhang, S.; Zhan, W.; Sun, C.; Duan, Y. Landsat 8 OLI image based terrestrial water extraction from heterogeneous backgrounds using a reflectance homogenization approach. Remote Sens. Environ. 2015, 171, 14–32. [Google Scholar] [CrossRef]
- Ghrefat, H.A.; Goodell, P.C. Land cover mapping at Alkali Flat and Lake Lucero, White Sands, New Mexico, USA using multi-temporal and multi-spectral remote sensing data. Int. J. Appl. Earth Obs. 2011, 13, 616–625. [Google Scholar] [CrossRef]
- Guo, Y.L.; Li, Y.M.; Zhu, L.; Liu, G.; Wang, S.; Du, C.G. An Improved Unmixing-Based Fusion Method: Potential application to remote monitoring of inland waters. Remote Sens. 2015, 7, 1640–1666. [Google Scholar] [CrossRef]
- Hommersom, A.; Wernand, M.R.; Peters, S.; Eleveld, M.A.; van der Woerd, H.J.; de Boer, J. Spectra of a shallow sea-unmixing for class identification and monitoring of coastal waters. Ocean. Dyn. 2011, 61, 463–480. [Google Scholar] [CrossRef]
- Wang, Q.; Atkinson, P.M.; Shi, W. Fast subpixel mapping algorithms for subpixel resolution change detection. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1692–1706. [Google Scholar] [CrossRef]
- Wang, Q.; Shi, W.; Atkinson, P.M.; Li, Z. Land cover change detection at subpixel resolution with a Hopfield neural network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1339–1352. [Google Scholar] [CrossRef]
- Shi, C.; Wang, L. Incorporating spatial information in spectral unmixing: A review. Remote Sens. Environ. 2014, 149, 70–87. [Google Scholar] [CrossRef]
- Li, H.; Zhang, L. A hybrid automatic endmember extraction algorithm based on a local window. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4223–4238. [Google Scholar] [CrossRef]
- Somers, B.; Asner, G.P.; Tits, L.; Coppin, P. Endmember variability in Spectral Mixture Analysis: A review. Remote Sens. Environ. 2011, 115, 1603–1616. [Google Scholar] [CrossRef]
- Zare, A.; Gader, P.; Bchir, O.; Frigui, H. Piecewise convex multiple-model endmember detection and spectral unmixing. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2853–2862. [Google Scholar] [CrossRef]
- Sun, D.; Yu, Y.; Goldberg, M.D. Deriving water fraction and flood maps from MODIS images using a decision tree approach. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2011, 4, 814–825. [Google Scholar] [CrossRef]
- Ma, B.; Wu, L.; Zhang, X.; Li, X.; Liu, Y.; Wang, S. Locally adaptive unmixing method for lake-water area extraction based on MODIS 250 m bands. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 33, 109–118. [Google Scholar]
- Sethre, P.R.; Rundquist, B.C.; Todhunter, P.E. Remote detection of Prairie Pothole Ponds in the Devils Lake Basin, North Dakota. GISci. Remote Sens. 2005, 42, 277–296. [Google Scholar] [CrossRef]
- Applied Analysis Inc. Subpixel Classifier for IMAGINE: User’s Guide; Applied Analysis Inc.: Billerica, MA, USA, 1997. [Google Scholar]
- Ji, L.; Zhang, L.; Wylie, B. Analysis of dynamic thresholds for the normalized difference water index. Photogramm. Eng. Remote Sens. 2009, 75, 1307–1317. [Google Scholar] [CrossRef]
- Xie, H.; Luo, X.; Xu, X.; Pan, H.; Tong, X. Evaluation of Landsat 8 OLI imagery for unsupervised inland water extraction. Int. J. Remote Sens. 2016, 37, 1826–1844. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar]
- Cleveland, W.S. Robust locally weighted regression and smoothing scatterplots. J. Am. Stat. Assoc. 1979, 74, 829–836. [Google Scholar] [CrossRef]
- Deng, C.; Wu, C. A spatially adaptive spectral mixture analysis for mapping subpixel urban impervious surface distribution. Remote Sens. Environ. 2013, 133, 62–70. [Google Scholar] [CrossRef]
- Powell, R.L.; Roberts, D.A.; Dennison, P.E.; Hess, L.L. Sub-pixel mapping of urban land cover using multiple endmember spectral mixture analysis: Manaus, Brazil. Remote Sens. Environ. 2007, 106, 253–267. [Google Scholar] [CrossRef]
- Roberts, D.A.; Quattrochi, D.A.; Hulley, G.C.; Hook, S.J.; Green, R.O. Synergies between VSWIR and TIR data for the urban environment: An evaluation of the potential for the Hyperspectral Infrared Imager (HyspIRI) Decadal Survey mission. Remote Sens. Environ. 2012, 117, 83–101. [Google Scholar] [CrossRef]
- Wu, C. Normalized spectral mixture analysis for monitoring urban composition using ETM+ imagery. Remote Sens. Environ. 2004, 93, 480–492. [Google Scholar] [CrossRef]
- Hu, X.; Weng, Q. Estimating impervious surfaces from medium spatial resolution imagery using the self-organizing map and multi-layer perceptron neural networks. Remote Sens. Environ. 2009, 113, 2089–2102. [Google Scholar] [CrossRef]
- Wu, C.; Murray, A.T. Estimating impervious surface distribution by spectral mixture analysis. Remote Sens. Environ. 2003, 84, 493–505. [Google Scholar] [CrossRef]
- Heinz, D.C.; Chang, C.I. Fully constrained least squares linear spectral mixture analysis method for material quantification in hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2001, 39, 529–545. [Google Scholar] [CrossRef]
- Roberts, D.A.; Gardner, M.; Church, R.; Ustin, S.; Scheer, G.; Green, R.O. Mapping Chaparral in the Santa Monica Mountains using multiple endmember spectral mixture models. Remote Sens. Environ. 1998, 65, 267–279. [Google Scholar] [CrossRef]
- Franke, J.; Roberts, D.A.; Halligan, K.; Menz, G. Hierarchical Multiple Endmember Spectral Mixture Analysis (MESMA) of hyperspectral imagery for urban environments. Remote Sens. Environ. 2009, 113, 1712–1723. [Google Scholar] [CrossRef]
- Dennison, P.E.; Roberts, D.A. Endmember selection for multiple endmember spectral mixture analysis using endmember average RMSE. Remote Sens. Environ. 2003, 87, 123–135. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Gao, B.C.; Li, R.R.; Berdnikov, S.; Saprygin, V. Estimation of chlorophyll-a concentration in productive turbid waters using a Hyperspectral Imager for the Coastal Ocean—The Azov Sea case study. Environ. Res. Lett. 2011, 6, 024023. [Google Scholar] [CrossRef]
- Song, K.; Li, L.; Tedesco, L.P.; Li, S.; Duan, H.; Liu, D.; Zhao, Y. Remote estimation of chlorophyll-a in turbid inland waters: Three-band model versus GA-PLS model. Remote Sens. Environ. 2013, 136, 342–357. [Google Scholar] [CrossRef]
- Mueller, N.; Lewis, A.; Roberts, D.; Ring, S.; Melrose, R.; Sixsmith, J.; Ip, A. Water observations from space: Mapping surface water from 25 years of Landsat imagery across Australia. Remote Sens. Environ. 2016, 174, 341–352. [Google Scholar] [CrossRef]
- Elmore, A.J.; Mustard, J.F.; Manning, S.J.; Lobell, D.B. Quantifying vegetation change in semiarid environments: Precision and accuracy of spectral mixture analysis and the normalized difference vegetation index. Remote Sens. Environ. 2000, 73, 87–102. [Google Scholar] [CrossRef]
- Weng, Q. Remote sensing of impervious surfaces in the urban areas: Requirements, methods, and trends. Remote Sens. Environ. 2012, 117, 34–49. [Google Scholar] [CrossRef]
- Liu, T.; Yang, X. Mapping vegetation in an urban area with stratified classification and multiple endmember spectral mixture analysis. Remote Sens. Environ. 2013, 133, 251–264. [Google Scholar] [CrossRef]
- Lu, D.; Weng, Q. Spectral mixture analysis of the urban landscape in indianapolis with Landsat ETM+ imagery. Photogramm. Eng. Remote Sens. 2004, 70, 1053–1062. [Google Scholar] [CrossRef]
- Song, C. Spectral mixture analysis for subpixel vegetation fractions in the urban environment: How to incorporate endmember variability? Remote Sens. Environ. 2005, 95, 248–263. [Google Scholar] [CrossRef]
- Keshava, N.; Mustard, J.F. Spectral unmixing. Proc. IEEE 2002, 19, 44–57. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study Area | Main Water Bodies (km2) | Water Characteristics | Acquisition Date of OLI Image | Acquisition Date of Reference Data |
|---|---|---|---|---|
| Beijing | Nanhai Lake (0.20) | Small and clear lakes | 16 April 2015 | 13 April 2015 |
| Zhonghai Lake (0.25) | ||||
| Beihai Lake (0.35) | ||||
| Qianhai Lake (0.08) | Small and clear rivers | |||
| Houhai Lake (0.16) | ||||
| Yutan Lake (0.40) | ||||
| Shanghai | Huangpu River (7.61) | Moderately turbid river | 10 April 2014 | 25 November 2014 |
| Wusong River (0.38) | Small and clear lake | 22 November 2014 | ||
| Hangzhou | Qiantang River (28.75) | Clear lake | 13 Decemebr 2014 | 24 December 2014 |
| Moderately turbid and turbid river | 3 May 2014 | |||
| Guangzhou | Pearl River (7.47) | Clear and moderately turbid river | 15 October 2014 | 5 October 2014 |
| Study Area | Kappa | Producer’s Accuracy | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| ASWM | MNDWI | FCLS | MESMA | CEM | ASWM | MNDWI | FCLS | MESMA | CEM | |
| Beijing | 0.739 | 0.610 | 0.279 | 0.088 | 0.211 | 70.2% | 45.8% | 87.3% | 88.2% | 45.22% |
| Shanghai | 0.899 | 0.842 | 0.548 | 0.837 | 0.442 | 84.8% | 74.3% | 88.3% | 77.4% | 788.0% |
| Hangzhou | 0.900 | 0.890 | 0.754 | 0.855 | 0.881 | 88.7% | 82.7% | 89.1% | 49.8% | 84.3% |
| Guangzhou | 0.910 | 0.817 | 0.729 | 0.739 | 0.797 | 87.5% | 71.4% | 91.4% | 85.9% | 79.0% |
| User’s accuracy | RMSE | |||||||||
| ASWM | MNDWI | FCLS | MESMA | CEM | ASWM | MNDWI | FCLS | MESMA | CEM | |
| Beijing | 79.2% | 93.7% | 18.4% | 0.7% | 16.0% | 0.046 | 0.059 | 0.110 | 0.209 | 0.157 |
| Shanghai | 97.2% | 99.6% | 54.8% | 93.6% | 36.1% | 0.045 | 0.067 | 0.085 | 0.058 | 0.078 |
| Hangzhou | 93.3% | 99.5% | 71.2% | 97.5% | 94.4% | 0.050 | 0.098 | 0.110 | 0.189 | 0.065 |
| Guangzhou | 97.3% | 99.2% | 64.6% | 69.0% | 85.9% | 0.080 | 0.085 | 0.093 | 0.084 | 0.151 |
| SE | ||||||||||
| ASWM | MNDWI | FCLS | MESMA | CEM | ||||||
| Beijing | −0.002 | −0.011 | 0.079 | 0.186 | 0.039 | |||||
| Shanghai | −0.009 | −0.017 | 0.041 | −0.012 | 0.078 | |||||
| Hangzhou | −0.004 | −0.023 | 0.034 | −0.100 | −0.010 | |||||
| Guangzhou | −0.014 | −0.025 | 0.037 | 0.022 | −0.011 | |||||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, H.; Luo, X.; Xu, X.; Pan, H.; Tong, X. Automated Subpixel Surface Water Mapping from Heterogeneous Urban Environments Using Landsat 8 OLI Imagery. Remote Sens. 2016, 8, 584. https://0-doi-org.brum.beds.ac.uk/10.3390/rs8070584
Xie H, Luo X, Xu X, Pan H, Tong X. Automated Subpixel Surface Water Mapping from Heterogeneous Urban Environments Using Landsat 8 OLI Imagery. Remote Sensing. 2016; 8(7):584. https://0-doi-org.brum.beds.ac.uk/10.3390/rs8070584
Chicago/Turabian StyleXie, Huan, Xin Luo, Xiong Xu, Haiyan Pan, and Xiaohua Tong. 2016. "Automated Subpixel Surface Water Mapping from Heterogeneous Urban Environments Using Landsat 8 OLI Imagery" Remote Sensing 8, no. 7: 584. https://0-doi-org.brum.beds.ac.uk/10.3390/rs8070584