Modeling and Compensation for Asymmetrical and Dynamic Hysteresis of Piezoelectric Actuators Using a Dynamic Delay Prandtl–Ishlinskii Model

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Hysteresis Model
2.1. Classic Prandtl–Ishlinskii Model
2.2. Dynamic Delay Prandtl–Ishlinskii Model
2.2.1. Modified Model
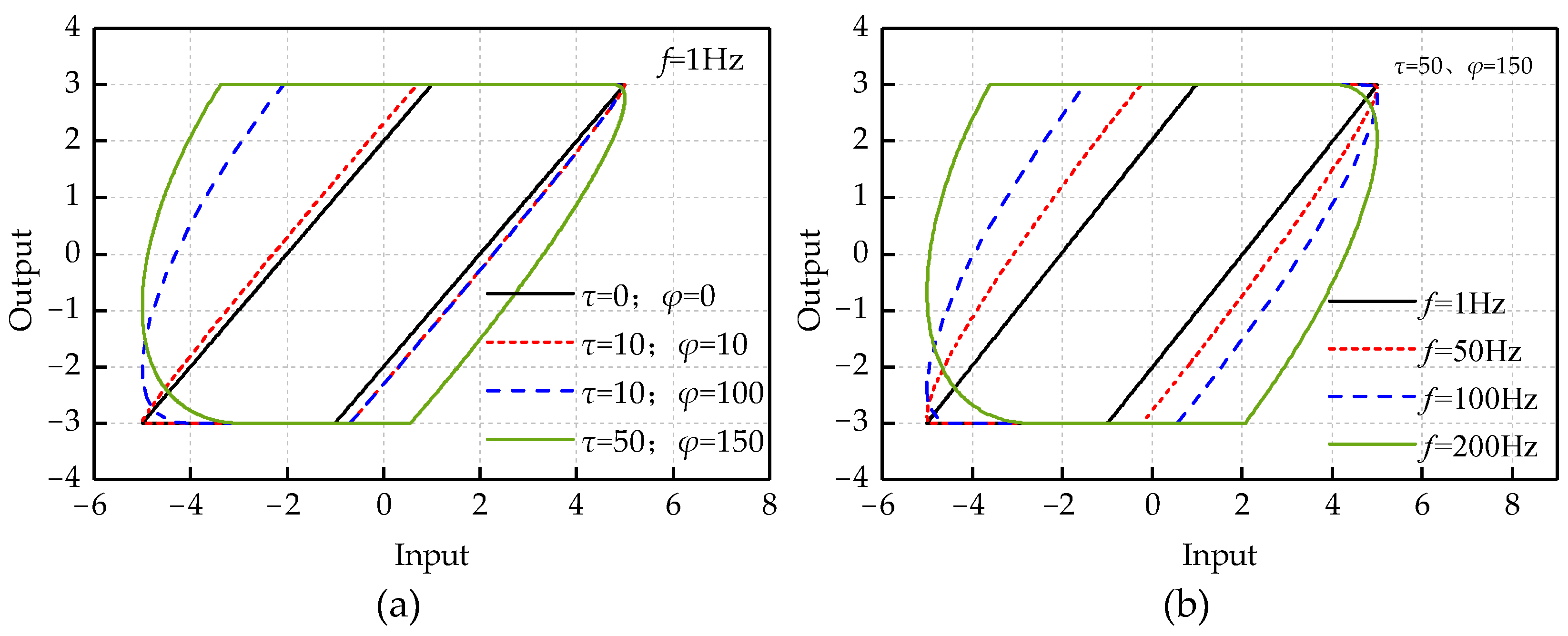
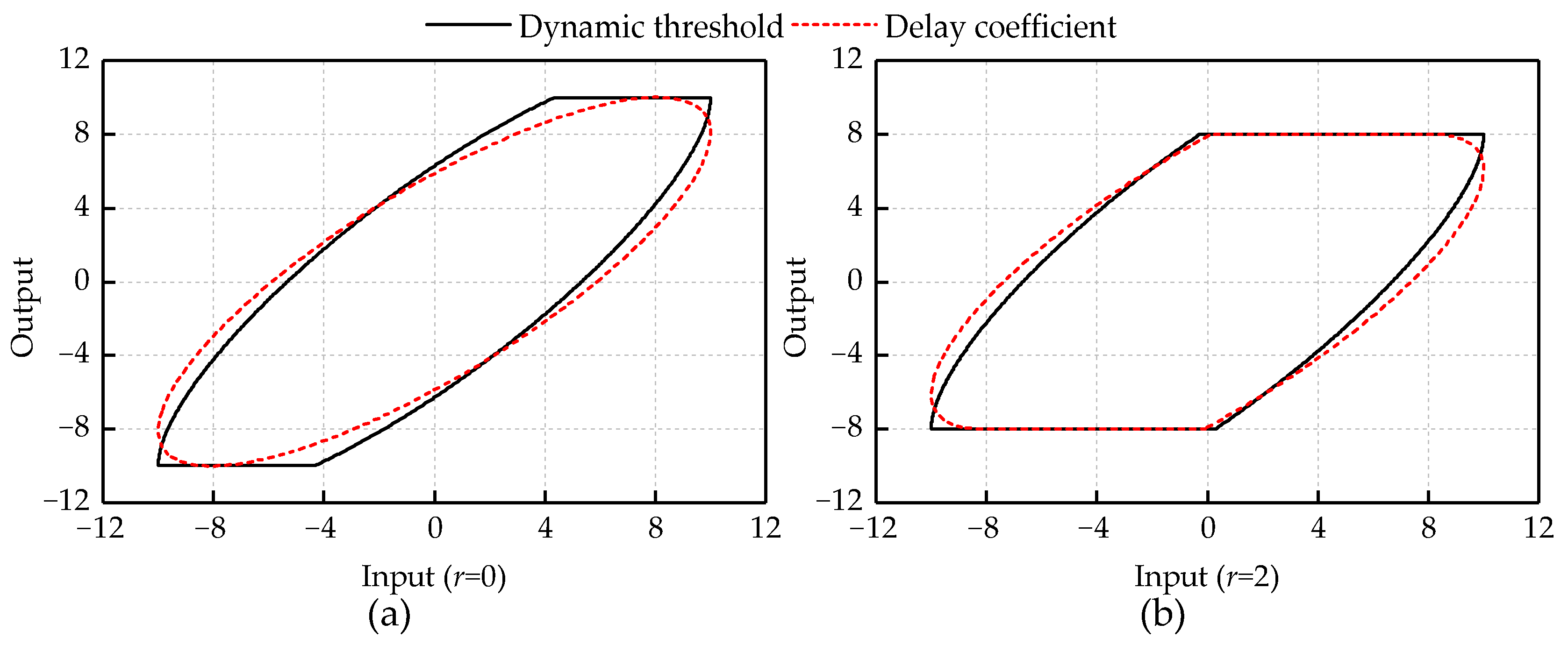
2.2.2. The Role of Two Delay Coefficients
3. Experiment Verification
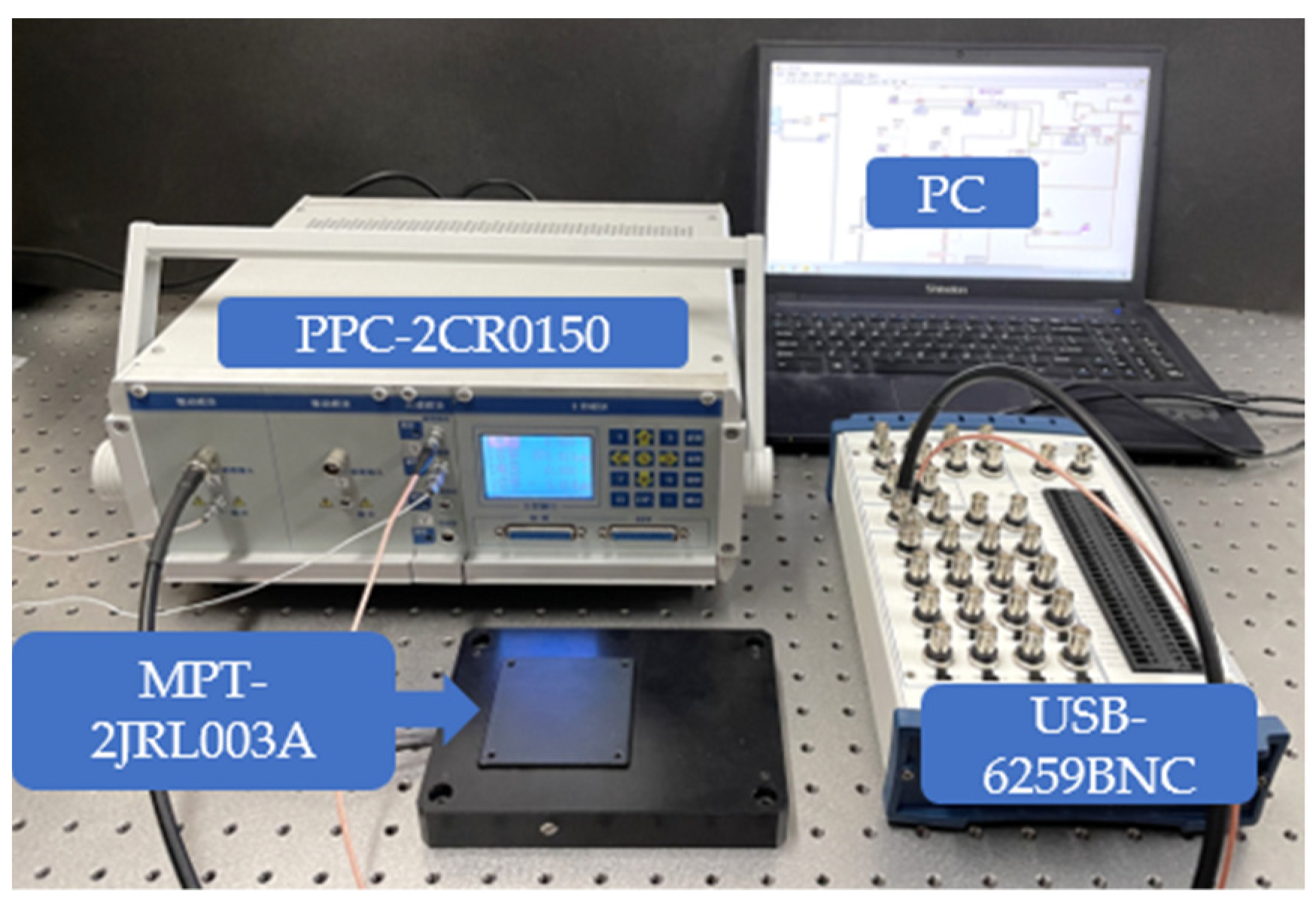
3.1. Experimental Setup
3.2. Experiment Design
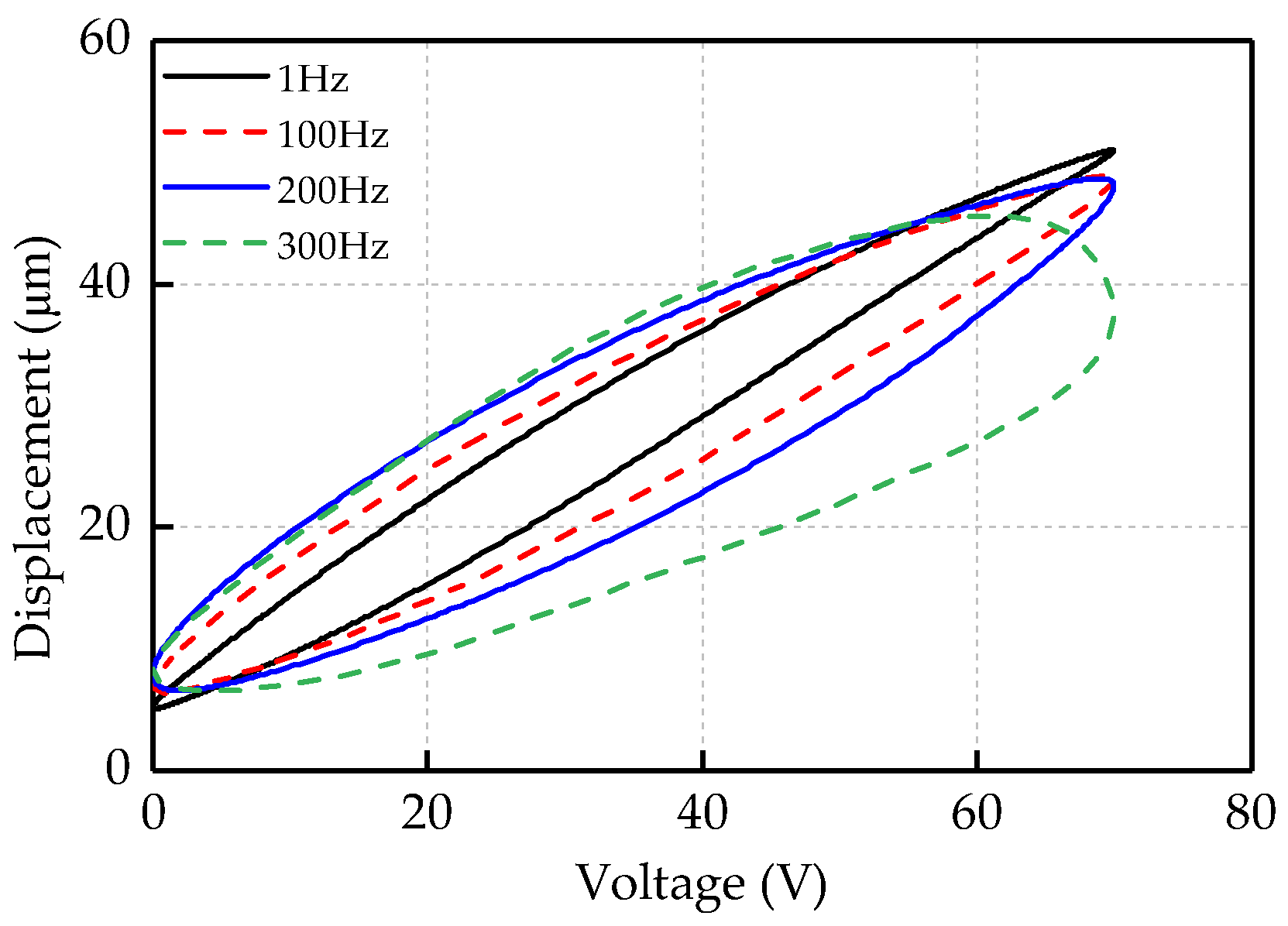
3.3. Experiment Results
4. Feedforward Control
5. Results and Discussion
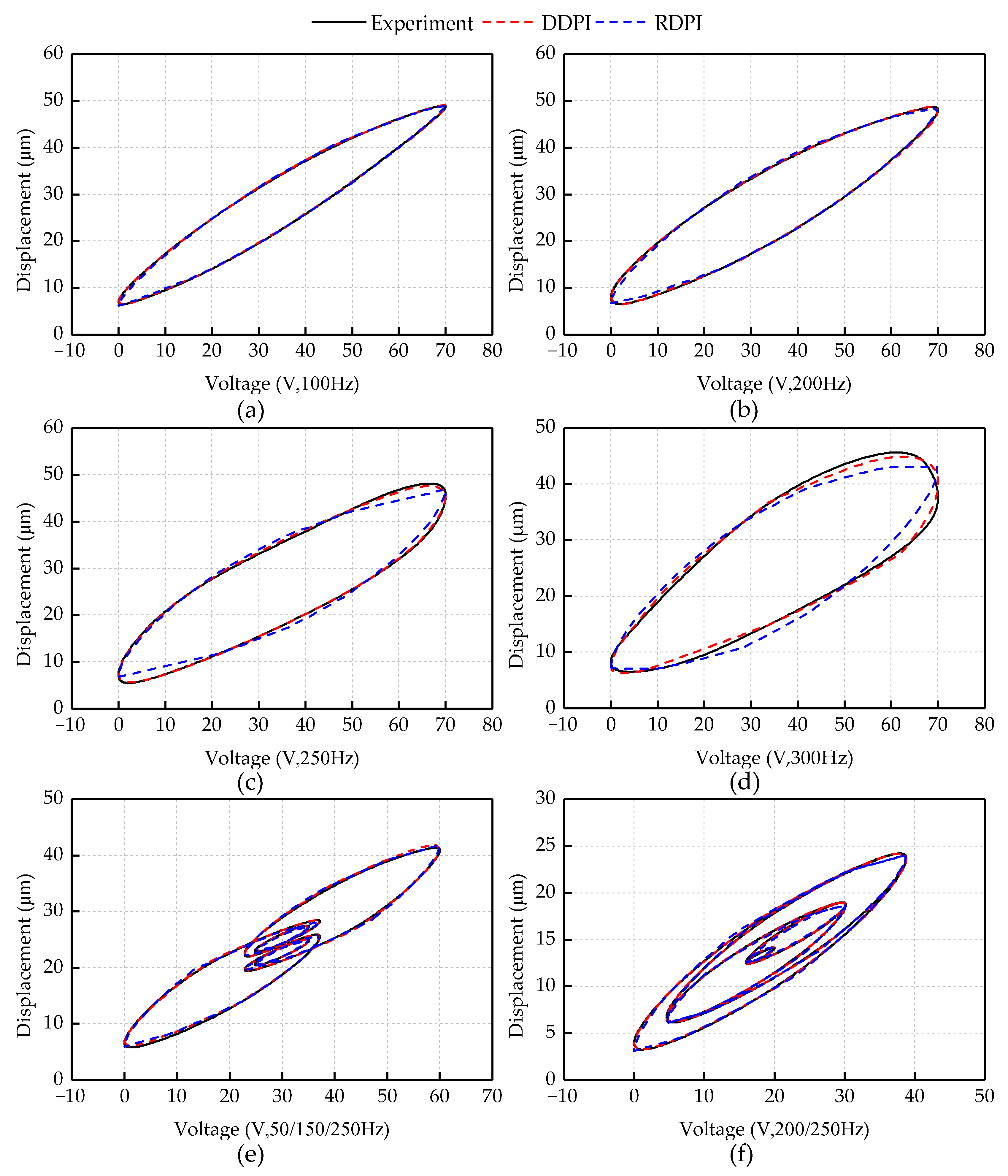
5.1. Results
5.2. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wang, S.; Rong, W.; Wang, L.; Xie, H.; Sun, L.; Mills, J.K. A survey of piezoelectric actuators with long working stroke in recent years: Classifications, principles, connections and distinctions. Mech. Syst. Signal Process. 2019, 123, 591–605. [Google Scholar] [CrossRef]
- Wei, H.; Shirinzadeh, B.; Li, W.; Clark, L.; Pinskier, J.; Wang, Y. Development of Piezo-Driven Compliant Bridge Mechanisms: General Analytical Equations and Optimization of Displacement Amplification. Micromachines 2017, 8, 238. [Google Scholar] [CrossRef] [PubMed]
- Quenzer, H.J.; Drechsler, U.; Sebastian, A.; Marauska, S.; Wagner, B.; Despont, M. Fabrication of conducting AFM cantilevers with AlN-based piezoelectric actuators. Procedia Eng. 2011, 25, 665–668. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, S.; Xu, L.; Zeng, Y. A new precise positioning method for piezoelectric scanner of AFM. Ultramicroscopy 2019, 196, 67–73. [Google Scholar] [CrossRef]
- Ma, H.; Hu, D.; Zhang, K. A fast tool feeding mechanism using piezoelectric actuators in noncircular turning. Int. J. Adv. Manuf. Technol. 2005, 27, 254–259. [Google Scholar] [CrossRef]
- Tian, Y.; Shirinzadeh, B.; Zhang, D. A flexure-based mechanism and control methodology for ultra-precision turning operation. Precis. Eng. 2009, 33, 160–166. [Google Scholar] [CrossRef]
- Bruant, I.; Gallimard, L.; Nikoukar, S. Optimal piezoelectric actuator and sensor location for active vibration control, using genetic algorithm. J. Sound Vib. 2010, 329, 1615–1635. [Google Scholar] [CrossRef] [Green Version]
- Moheimani, S.O.R.; Vautier, B.J.G. Resonant control of structural vibration using charge-driven piezoelectric actuators. IEEE Trans. Control Syst. Technol. 2005, 13, 1021–1035. [Google Scholar] [CrossRef]
- Jung, H.; Gweon, D.-G. Creep characteristics of piezoelectric actuators. Rev. Sci. Instrum. 2000, 71, 1896–1900. [Google Scholar] [CrossRef] [Green Version]
- Habineza, D.; Zouari, M.; Le Gorrec, Y.; Rakotondrabe, M. Multivariable Compensation of Hysteresis, Creep, Badly Damped Vibration, and Cross Couplings in Multiaxes Piezoelectric Actuators. IEEE Trans. Autom. Sci. Eng. 2018, 15, 1639–1653. [Google Scholar] [CrossRef] [Green Version]
- Adriaens, H.J.M.T.S.; De Koning, W.L.; Banning, R. Modeling piezoelectric actuators. IEEE ASME Trans. Mechatron. 2000, 5, 331–341. [Google Scholar] [CrossRef] [Green Version]
- Tao, Y.-D.; Li, H.-X.; Zhu, L.-M. Rate-dependent hysteresis modeling and compensation of piezoelectric actuators using Gaussian process. Sens. Actuators A Phys. 2019, 295, 357–365. [Google Scholar] [CrossRef]
- Gu, G.-Y.; Zhu, L.-M.; Su, C.-Y.; Ding, H.; Fatikow, S. Modeling and Control of Piezo-Actuated Nanopositioning Stages: A Survey. IEEE Trans. Autom. Sci. Eng. 2016, 13, 313–332. [Google Scholar] [CrossRef]
- Nieves, P.; Arapan, S.; Kadzielawa, A.P.; Legut, D. MAELASviewer: An Online Tool to Visualize Magnetostriction. Sensors 2020, 20, 6436. [Google Scholar] [CrossRef]
- Tan, X.; Baras, J.S. Modeling and control of hysteresis in magnetostrictive actuators. Automatica 2004, 40, 1469–1480. [Google Scholar] [CrossRef] [Green Version]
- Haigh, C.D.; Crews, J.H.; Wang, S.; Buckner, G.D. Multi-Objective Design Optimization of a Shape Memory Alloy Flexural Actuator. Actuators 2019, 8, 13. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Du, D.; Qi, N.; Zhao, J. A Distributed Parameter Maxwell-Slip Model for the Hysteresis in Piezoelectric Actuators. IEEE Trans. Ind. Electron. 2019, 66, 7150–7158. [Google Scholar] [CrossRef]
- Gan, J.; Zhang, X. A review of nonlinear hysteresis modeling and control of piezoelectric actuators. AIP Adv. 2019, 9, 040702. [Google Scholar] [CrossRef] [Green Version]
- Lei, L.; Kok Kiong, T.; Chek Sing, T.; Si-Lu, C.; Tong Heng, L. Development of an Approach toward Comprehensive Identification of Hysteretic Dynamics in Piezoelectric Actuators. IEEE Trans. Control Syst. Technol. 2013, 21, 1834–1845. [Google Scholar] [CrossRef]
- Liu, L.; Tan, K.K.; Chen, S.; Teo, C.S.; Lee, T.H. Discrete Composite Control of Piezoelectric Actuators for High-Speed and Precision Scanning. IEEE Trans. Ind. Inform. 2013, 9, 859–868. [Google Scholar] [CrossRef]
- Xiong, R.; Liu, X.; Lai, Z. Modeling of Hysteresis in Piezoelectric Actuator Based on Segment Similarity. Micromachines 2015, 6, 1805–1824. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Tan, Y.; Su, M. Modeling of hysteresis in piezoelectric actuators using neural networks. Mech. Syst. Signal Process. 2009, 23, 2699–2711. [Google Scholar] [CrossRef]
- Hassani, V.; Tjahjowidodo, T.; Do, T.N. A survey on hysteresis modeling, identification and control. Mech. Syst. Signal Process. 2014, 49, 209–233. [Google Scholar] [CrossRef]
- Wilson, P.R.; Ross, J.N.; Brown, A.D. Optimizing the Jiles-Atherton model of hysteresis by a genetic algorithm. IEEE Trans. Magn. 2002, 37, 989–993. [Google Scholar] [CrossRef]
- Hu, H.; Mrad, R.B. On the classical Preisach model for hysteresis in piezoceramic actuators. Mechatronics 2003, 13, 85–94. [Google Scholar] [CrossRef]
- Li, Z.; Shan, J.; Gabbert, U. Inverse Compensator for a Simplified Discrete Preisach Model Using Model-Order Reduction Approach. IEEE Trans. Ind. Electron. 2019, 66, 6170–6178. [Google Scholar] [CrossRef]
- Vasquez-Beltran, M.A.; Jayawardhana, B.; Peletier, R. Recursive Algorithm for the Control of Output Remnant of Preisach Hysteresis Operator. IEEE Control Syst. Lett. 2021, 5, 1061–1066. [Google Scholar] [CrossRef]
- Al Janaideh, M.; Aljanaideh, O. Further results on open-loop compensation of rate-dependent hysteresis in a magnetostrictive actuator with the Prandtl-Ishlinskii model. Mech. Syst. Signal Process. 2018, 104, 835–850. [Google Scholar] [CrossRef]
- An, D.; Li, H.; Xu, Y.; Zhang, L. Compensation of Hysteresis on Piezoelectric Actuators Based on Tripartite PI Model. Micromachines 2018, 9, 44. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Wang, J.; Chen, Z.; Wang, R.; Lu, K.; Sang, Z.; Ju, B. Research on Asymmetric Hysteresis Modeling and Compensation of Piezoelectric Actuators with PMPI Model. Micromachines 2020, 11, 357. [Google Scholar] [CrossRef] [Green Version]
- Zakerzadeh, M.R.; Sayyaadi, H.; Zanjani, M.A.V. Characterizing Hysteresis Nonlinearity Behavior of SMA Actuators by Krasnosel’skii-Pokrovskii Model. J. Appl. Math. 2012, 1, 28–38. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.; Chattopadhyay, A. Hysteresis Behavior and Modeling of Piezoceramic Actuators. J. Appl. Mech. 2001, 68, 270–277. [Google Scholar] [CrossRef]
- Sohrabi, A.; Muliana, A. Rate-dependent electro-mechanical coupling response of ferroelectric materials: A finite element formulation. Mech. Mater. 2013, 62, 44–59. [Google Scholar] [CrossRef]
- Lin, C.H.; Muliana, A. Polarization switching responses of 1–3 and 0–3 active composites. Compos. Struct. 2014, 116, 535–551. [Google Scholar] [CrossRef]
- Al Janaideh, M.; Krejci, P. Inverse Rate-Dependent Prandtl–Ishlinskii Model for Feedforward Compensation of Hysteresis in a Piezomicropositioning Actuator. IEEE ASME Trans. Mechatron. 2013, 18, 1498–1507. [Google Scholar] [CrossRef]
- Jiang, H.; Ji, H.; Qiu, J.; Chen, Y. A modified prandtl-ishlinskii model for modeling asymmetric hysteresis of piezoelectric actuators. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2010, 57, 1200–1210. [Google Scholar] [CrossRef] [PubMed]
- Qin, Y.; Zhao, X.; Zhou, L. Modeling and Identification of the Rate-Dependent Hysteresis of Piezoelectric Actuator Using a Modified Prandtl-Ishlinskii Model. Micromachines 2017, 8, 114. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Xiao, Z.; Naganathan, N.G.; Dukkipati, R.V. Dynamic Preisach modelling of hysteresis for the piezoceramic actuator system. Mech. Mach. Theory 2002, 37, 75–89. [Google Scholar] [CrossRef]
- Zhu, W.; Rui, X.-T. Hysteresis modeling and displacement control of piezoelectric actuators with the frequency-dependent behavior using a generalized Bouc–Wen model. Precis. Eng. 2016, 43, 299–307. [Google Scholar] [CrossRef]
- Sun, Z.; Song, B.; Xi, N.; Yang, R.; Hao, L.; Yang, Y.; Chen, L. Asymmetric Hysteresis Modeling and Compensation Approach for Nanomanipulation System Motion Control Considering Working-Range Effect. IEEE Trans. Ind. Electron. 2017, 64, 5513–5523. [Google Scholar] [CrossRef]
- Qin, Y.; Duan, H. Single-Neuron Adaptive Hysteresis Compensation of Piezoelectric Actuator Based on Hebb Learning Rules. Micromachines 2020, 11, 84. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Devasia, S.; Eleftheriou, E.; Moheimani, S.O.R. A Survey of Control Issues in Nanopositioning. IEEE Trans. Control Syst. Technol. 2007, 15, 802–823. [Google Scholar] [CrossRef]
- Huang, D.; Min, D.; Jian, Y.; Li, Y. Current-Cycle Iterative Learning Control for High-Precision Position Tracking of Piezoelectric Actuator System via Active Disturbance Rejection Control for Hysteresis Compensation. IEEE Trans. Ind. Electron. 2020, 67, 8680–8690. [Google Scholar] [CrossRef]
- Fang, J.; Wang, J.; Li, C.; Zhong, W.; Long, Z. A Compound Control Based on the Piezo-Actuated Stage with Bouc-Wen Model. Micromachines 2019, 10, 861. [Google Scholar] [CrossRef] [PubMed] [Green Version]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Han, F.; Chen, Z.; Wang, R.; Wang, C.; Lu, K.; Wang, J.; Ju, B. Modeling and Compensation for Asymmetrical and Dynamic Hysteresis of Piezoelectric Actuators Using a Dynamic Delay Prandtl–Ishlinskii Model. Micromachines 2021, 12, 92. https://0-doi-org.brum.beds.ac.uk/10.3390/mi12010092
Wang W, Han F, Chen Z, Wang R, Wang C, Lu K, Wang J, Ju B. Modeling and Compensation for Asymmetrical and Dynamic Hysteresis of Piezoelectric Actuators Using a Dynamic Delay Prandtl–Ishlinskii Model. Micromachines. 2021; 12(1):92. https://0-doi-org.brum.beds.ac.uk/10.3390/mi12010092
Chicago/Turabian StyleWang, Wen, Fuming Han, Zhanfeng Chen, Ruijin Wang, Chuanyong Wang, Keqing Lu, Jiahui Wang, and Bingfeng Ju. 2021. "Modeling and Compensation for Asymmetrical and Dynamic Hysteresis of Piezoelectric Actuators Using a Dynamic Delay Prandtl–Ishlinskii Model" Micromachines 12, no. 1: 92. https://0-doi-org.brum.beds.ac.uk/10.3390/mi12010092