
A Fast-Response Driving Waveform Design Based on High-Frequency Voltage for Three-Color Electrophoretic Displays


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
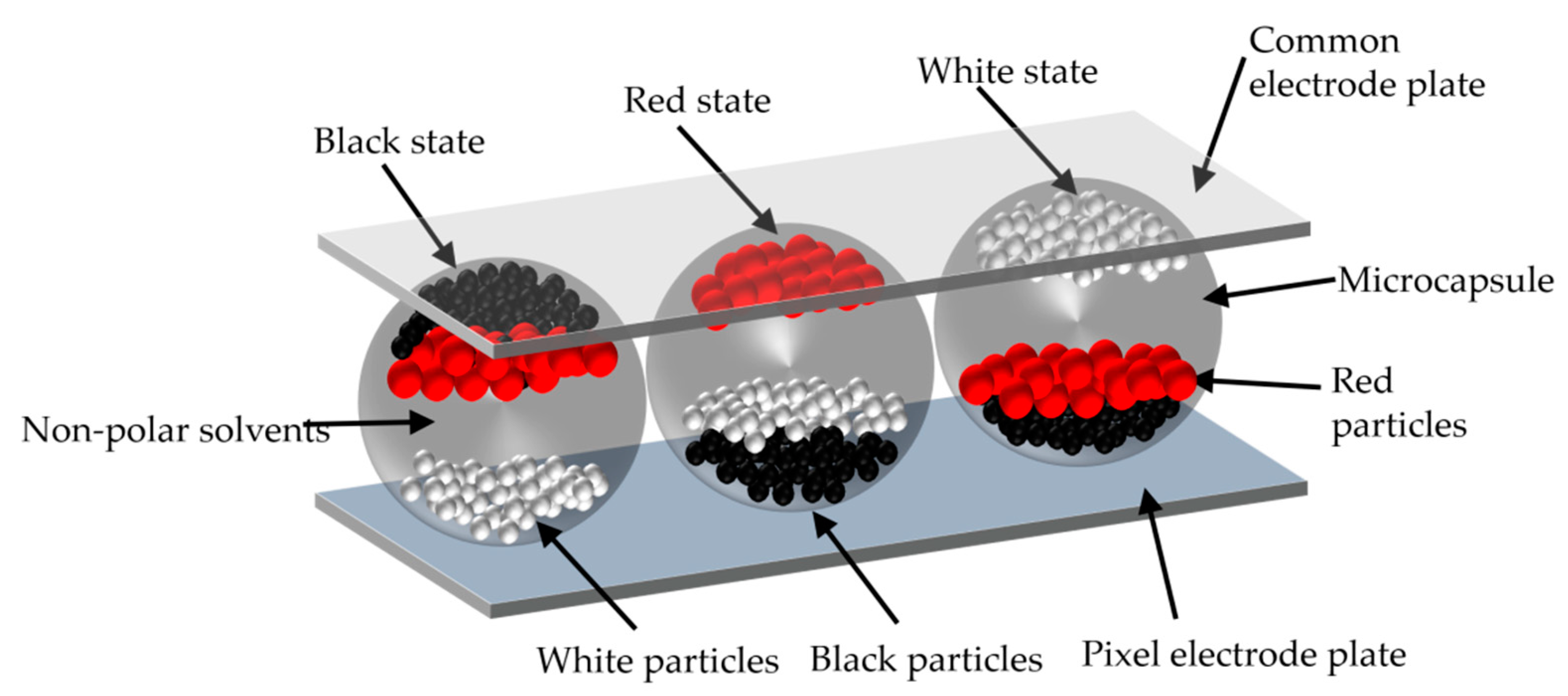
2. Principle of Three-Color EPDs
3. Experimental Results and Discussion
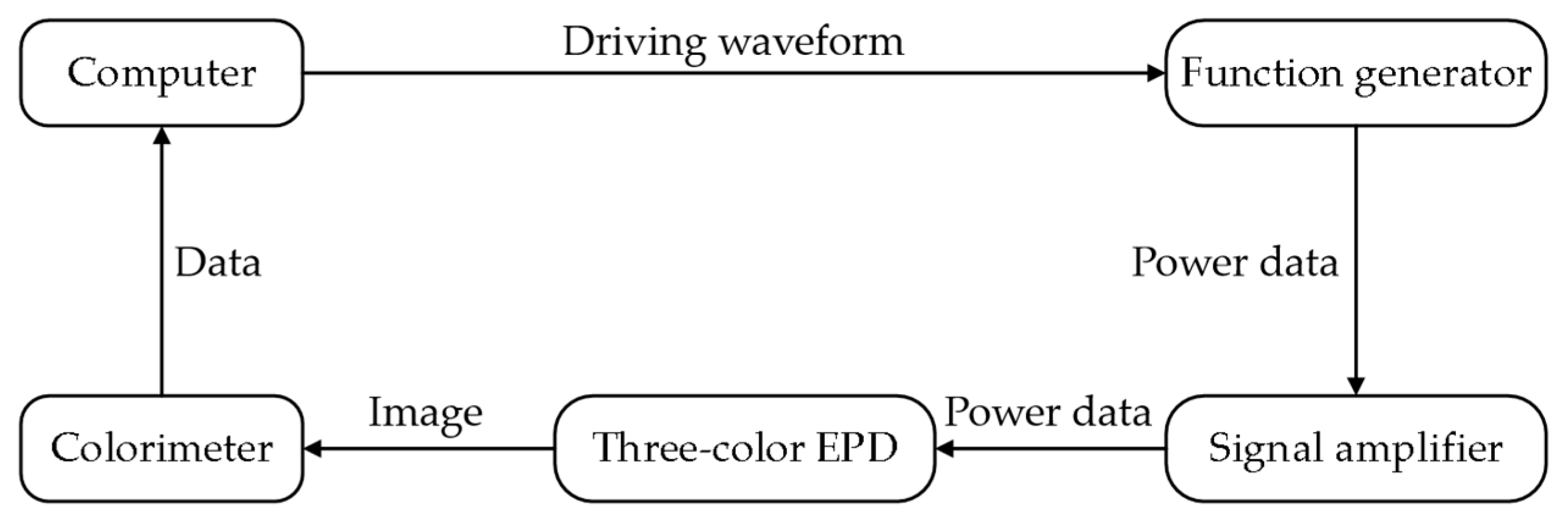
3.1. Experimental Platform
3.2. Driving Waveform Design
3.3. Frequency Optimization of Activation Stage
3.4. Duration Optimization of Activation Stage
3.5. Driving Voltage Optimization of Red Particles
3.6. New Red Driving Stage Optimization
3.7. Performance of the Proposed Driving Waveform
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Heikenfeld, J.; Drzaic, P.; Yeo, J.S.; Koch, T. Review Paper: A critical review of the present and future prospects for electronic paper. J. Soc. Inf. Disp. 2011, 19, 129–156. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.K.; Kim, S.S.; Park, Y.I.; Kim, C.D.; Hwang, Y.K. In-cell adaptive touch technology for a flexible e-paper display. Solid-State Electron. 2011, 56, 159–162. [Google Scholar] [CrossRef]
- Shen, S.T.; Gong, Y.X.; Jin, M.L.; Yan, Z.B.; Xu, C.; Yi, Z.C.; Zhou, G.F.; Shui, L.L. Improving electrophoretic particle motion control in electrophoretic displays by eliminating the fringing effect via driving waveform design. Micromachines 2018, 9, 143. [Google Scholar] [CrossRef] [Green Version]
- He, W.Y.; Yi, Z.C.; Shen, S.T.; Huang, Z.Y.; Liu, L.W.; Zhang, T.Y.; Li, W. Driving waveform design of electrophoretic display based on optimized particle activation for a rapid response speed. Micromachines 2020, 11, 498. [Google Scholar] [CrossRef]
- Zeng, W.J.; Yi, Z.C.; Zhao, Y.M.; Zeng, W.B.; Ma, S.M.; Zhou, X.C.; Feng, H.Q. Design of Driving Waveform Based on Overdriving Voltage for Shortening Response Time in Electrowetting Displays. Front. Phys. 2021, 9, 642682. [Google Scholar] [CrossRef]
- Jin, M.L.; Shen, S.T.; Yi, Z.C.; Zhou, G.F.; Shui, L.L. Optofluid-Based Reflective Displays. Micromachines 2018, 9, 159. [Google Scholar] [CrossRef] [Green Version]
- Comiskey, B.; Albert, J.D.; Yoshizawa, H.; Jacobson, J. An electrophoretic ink for all-printed reflective electronic displays. Nature 1998, 394, 253–255. [Google Scholar] [CrossRef]
- Kao, W.C.; Tsai, J.C. Driving Method of Three-Particle Electrophoretic Displays. IEEE Trans. Electron Devices 2018, 65, 1023–1028. [Google Scholar] [CrossRef]
- Yi, Z.; Shui, L.; Wang, L.; Jin, M.; Hayes, R.; Zhou, G. A novel driver for active matrix electrowetting displays. Displays 2015, 37, 86–93. [Google Scholar] [CrossRef]
- Cao, J.X.; Qin, Z.; Zeng, Z.; Hu, W.J.; Song, L.Y.; Hu, D.L.; Wang, X.D.; Zeng, X.; Chen, Y.; Yang, B.R. A convolutional neural network for ghost image recognition and waveform design of electrophoretic displays. IEEE Trans. Consum. Electron. 2020, 66, 356–365. [Google Scholar] [CrossRef]
- Qin, Z.; Wang, H.I.; Chen, Z.Y.; Chen, C.H.; Tien, P.L.; Liu, M.H.; Liu, S.C.; Hung, C.M.; Tsai, C.C.; Huang, Y.P. Digital halftoning method with simultaneously optimized perceptual image quality and drive current for multi-tonal electrophoretic displays. Appl. Opt. 2020, 59, 201–209. [Google Scholar] [CrossRef]
- Yang, S.H.; Lin, F.C.; Huang, Y.P.; Shieh, H.P.D.; Yang, B.R.; Chang, M.J.; Huang, J.C.; Hsieh, Y.J. P-83: Ghosting reduction driving method in electrophoretic displays. SID Int. Symp. Dig. Tech. Pap. 2012, 43, 1361–1364. [Google Scholar] [CrossRef]
- Yi, Z.C.; Liu, L.W.; Wang, L.; Li, W.; Shui, L.L.; Zhou, G.F. A Driving System for Fast and Precise Gray-Scale Response Based on Amplitude-Frequency Mixed Modulation in TFT Electrowetting Displays. Micromachines 2019, 10, 732. [Google Scholar] [CrossRef] [Green Version]
- Lu, C.M.; Wey, C.L. A controller design for high-quality images on microcapsule active-matrix electrophoretic displays. J. Inf. Disp. 2012, 13, 21–30. [Google Scholar] [CrossRef]
- Yi, Z.C.; Zhang, H.; Zeng, W.J.; Feng, H.Q.; Long, Z.X.; Liu, L.M.; Hu, Y.F.; Zhou, X.C.; Zhang, C.F. Review of Driving Waveform for Electrowetting Displays. Front. Phys. 2021, 9, 728804. [Google Scholar] [CrossRef]
- Zhang, Y.P.; Zhen, B.; Al-shuja’a, S.A.S.; Zhou, G.Y.; Li, X.G.; Feng, Y.Q. Fast-response and monodisperse silica nanoparticles modified with ionic liquid towards electrophoretic displays. Dye Pigment. 2018, 148, 270–275. [Google Scholar] [CrossRef]
- Yi, Z.C.; Feng, H.Q.; Zhou, X.F.; Shui, L.L. Design of an Open Electrowetting on Dielectric Device Based on Printed Circuit Board by Using a Parafilm M. Front. Phys. 2020, 8, 193. [Google Scholar] [CrossRef]
- Li, W.; Wang, L.; Zhang, T.Y.; Lai, S.F.; Liu, L.W.; He, W.Y.; Zhou, G.F.; Yi, Z.C. Driving Waveform Design with Rising Gradient and Sawtooth Wave of Electrowetting Displays for Ultra-Low Power Consumption. Micromachines 2020, 11, 145. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.P.; Zhen, B.; Li, R.N.; Meng, S.X.; Li, X.G.; Feng, Y.Q. Low density and fast response silica coated with ionic liquid polymer nanoparticles towards electrophoretic displays. Mater. Lett. 2018, 211, 17–20. [Google Scholar] [CrossRef]
- Wang, L.; Yi, Z.C.; Jin, M.L.; Shui, L.L.; Zhou, G.F. Improvement of video playback performance of electrophoretic displays by optimized waveforms with shortened refresh time. Displays 2017, 49, 95–100. [Google Scholar] [CrossRef]
- Yi, Z.C.; Bai, P.F.; Wang, L.; Zhang, X.; Zhou, G.F. An electrophoretic display driving waveform based on improvement of activation pattern. J. Cent. South Univ. 2014, 21, 3133–3137. [Google Scholar] [CrossRef]
- Duan, F.B.; Bai, P.F.; Henzen, A.; Shui, L.L.; Tang, B.A.; Zhou, G.F. An adaptive generation method for electrophoretic display driving waveform design. J. Soc. Inf. Disp. 2016, 24, 676–685. [Google Scholar] [CrossRef]
- Kao, W.C.; Chen, H.Y.; Liu, Y.H.; Liou, S.C. Hardware Engine for Supporting Gray-Tone Paintbrush Function on Electrophoretic Papers. J. Disp. Technol. 2014, 10, 137–145. [Google Scholar] [CrossRef]
- Yi, Z.; Zeng, W.; Ma, S.; Feng, H.; Zeng, W.; Shen, S.; Shui, L.; Zhou, G.; Zhang, C. Design of driving waveform based on a damping oscillation for optimizing red saturation in three-color electrophoretic displays. Micromachines 2021, 12, 162. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Yi, Z.C.; Ma, S.M.; Deng, S.N.; Zhou, W.B.; Zeng, W.J.; Liu, L.M.; Chi, F.; Hu, Y.F.; Zhang, C.F.; et al. Design of Driving Waveform for Shortening Response Time of Black Particles and White Particles in Three-Color Electrophoretic Displays. Micromachines 2021, 12, 1306. [Google Scholar] [CrossRef]
- Zeng, W.J.; Yi, Z.C.; Zhou, X.C.; Zhao, Y.M.; Feng, H.Q.; Yang, J.J.; Liu, L.M.; Chi, F.; Zhang, C.F.; Zhou, G.F. Design of Driving Waveform for Shortening Red Particles Response Time in Three-Color Electrophoretic Displays. Micromachines 2021, 12, 578. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.F.; Yi, Z.C.; de Rooij, N.; Zhou, G.F.; Gravina, R. Editorial: Modeling and Applications of Optoelectronic Devices for Access Networks. Front. Phys. 2021, 9, 678269. [Google Scholar] [CrossRef]
- Seki, T.; Yagai, S.; Karatsu, T.; Kitamura, A. Formation of Supramolecular Polymers and Discrete Dimers of Perylene Bisimide Dyes Based on Melamine−Cyanurates Hydrogen-Bonding Interactions. J. Org. Chem. 2008, 9, 3328–3335. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Zheng, A.; Jiang, Y.F.; Lan, D.S.; Lu, F.H.; Zheng, L.L.; Zhuang, L.; Hong, R.J. Large-scale preparation of size-controlled Fe3O4@SiO2 particles for electrophoretic display with non-iridescent structural colors. RSC Adv. 2019, 9, 498–506. [Google Scholar] [CrossRef] [Green Version]
- Christophersen, M.; Phlips, B.F. Recent patents on electrophoretic displays and materials. Recent Pat. Nanotechnol. 2010, 4, 137–149. [Google Scholar] [CrossRef]
- Liu, L.W.; Bai, P.F.; Yi, Z.C.; Zhou, G.F. A Separated Reset Waveform Design for Suppressing Oil Backflow in Active Matrix Electrowetting Displays. Micromachines 2021, 12, 491. [Google Scholar] [CrossRef]
- Kim, J.M.; Kim, K.; Lee, S.W. Multilevel driving waveform for electrophoretic displays to improve grey levels and response characteristics. Electron. Lett. 2014, 50, 1925–1927. [Google Scholar] [CrossRef]
- Johnson, M.T.; Zhou, G.F.; Zehner, R.; Amundson, K.; Henzen, A.; VandeKamer, J. High-quality images on electrophoretic displays. J. Soc. Inf. Disp. 2006, 14, 175–180. [Google Scholar] [CrossRef]
- Bert, T.; De Smet, H.; Beunis, F.; Neyts, K. Complete electrical and optical simulation of electronic paper. Displays 2006, 27, 50–55. [Google Scholar] [CrossRef]
- Cho, K.Y. An Analysis of Reflectivity and Response Time by Charge-to-Mass of Charged Particles in an Electrophoretic Display. Trans. Electr. Electron. Mater. 2016, 17, 212–216. [Google Scholar] [CrossRef] [Green Version]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Yi, Z.; Liu, L.; Chi, F.; Hu, Y.; Huang, S.; Miao, Y.; Wang, L. A Fast-Response Driving Waveform Design Based on High-Frequency Voltage for Three-Color Electrophoretic Displays. Micromachines 2022, 13, 59. https://0-doi-org.brum.beds.ac.uk/10.3390/mi13010059
Zhang H, Yi Z, Liu L, Chi F, Hu Y, Huang S, Miao Y, Wang L. A Fast-Response Driving Waveform Design Based on High-Frequency Voltage for Three-Color Electrophoretic Displays. Micromachines. 2022; 13(1):59. https://0-doi-org.brum.beds.ac.uk/10.3390/mi13010059
Chicago/Turabian StyleZhang, Hu, Zichuan Yi, Liming Liu, Feng Chi, Yunfeng Hu, Sida Huang, Yu Miao, and Li Wang. 2022. "A Fast-Response Driving Waveform Design Based on High-Frequency Voltage for Three-Color Electrophoretic Displays" Micromachines 13, no. 1: 59. https://0-doi-org.brum.beds.ac.uk/10.3390/mi13010059