
An Iterative Approach for the Parameter Estimation of Shear-Rate and Temperature-Dependent Rheological Models for Polymeric Liquids


Abstract
:1. Introduction
2. Model and Methods
2.1. Truncated Newton Method
- Step 1:
- Choose the initial guess and compute the function S. Set ;
- Step 2:
- If convergence is satisfied by , then stop the algorithm;
- Step 3:
- Compute the search direction in the matrix Equation:where and are the Hessian and the gradient of the function , respectively.
- Step 4:
- With the obtained in Step 2, compute the line search such that .
- Step 5:
- Set , and . Return to Step 2.
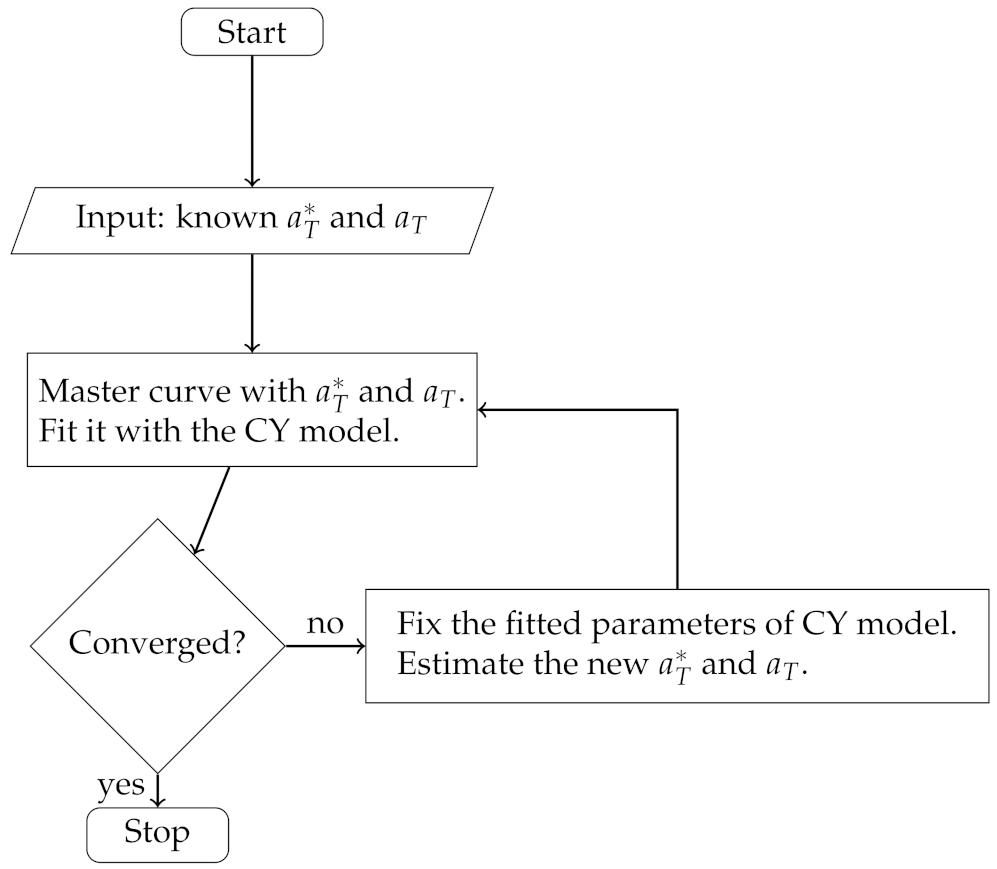
2.2. Proposed Global Iterative Algorithm
- Step 1:
- Construct the master curve with the known shift factors. Fit it with the CY model. Set . If is satisfactory for convergence, then terminate the algorithm;
- Step 2:
- Step 3:
- Construct the master curve with the fitted shift factors from Step 2. Fit it with the CY model. Set . If is satisfactory for convergence, then terminate the algorithm;
- Step 4:
- Go to Step 2.
- Step 1:
- Step 2:
- Step 3:
- Construct the master curve with the fitted shift factors from Step 2. Fit it with the CY model. Set . If is satisfactory for convergence, then terminate the algorithm;
- Step 4:
- Go to Step 2.
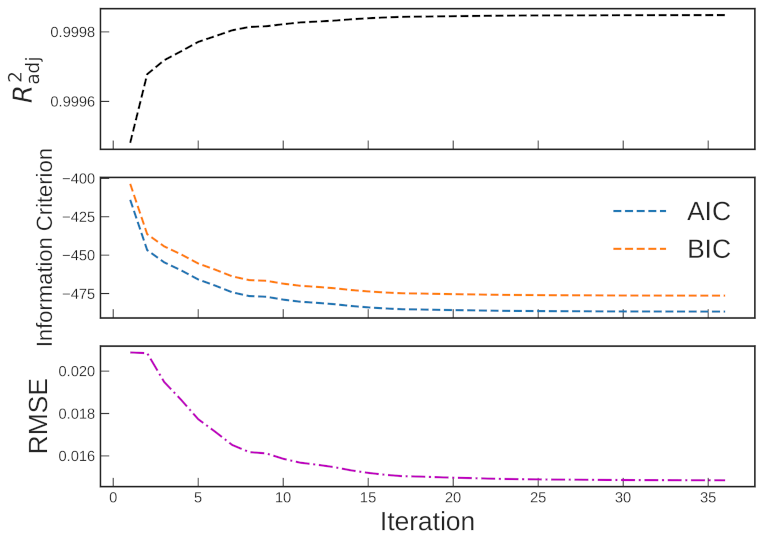
2.3. Goodness of Fit
2.4. Experimental Data
3. Results and Discussion
3.1. Nonlinear Regression: Traditional Approach vs. Scenario 1
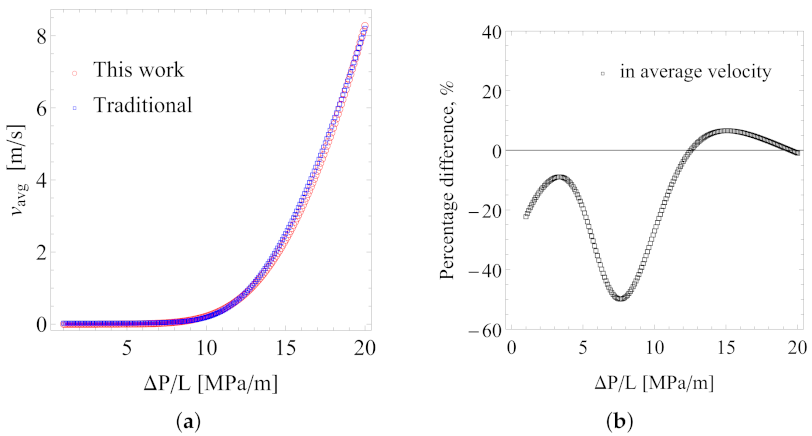
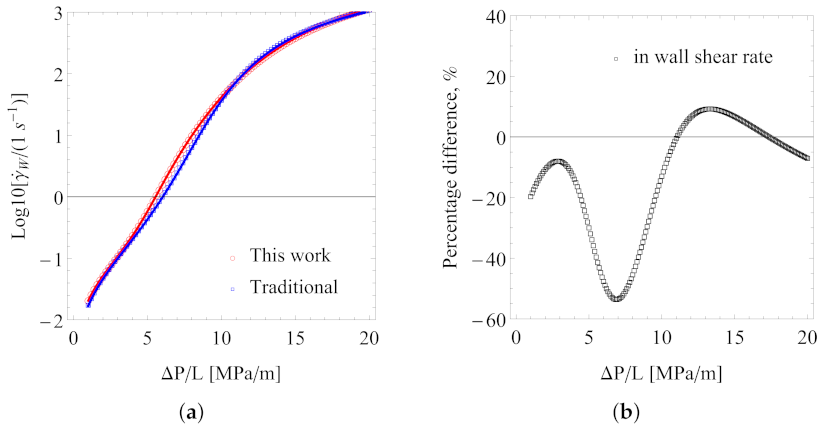
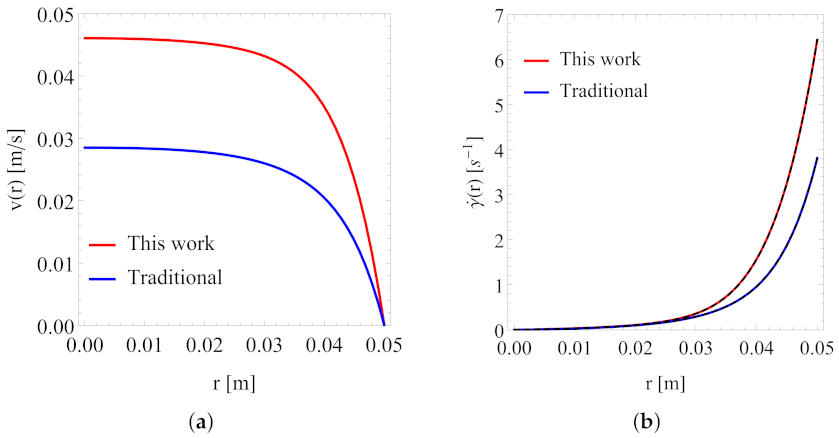
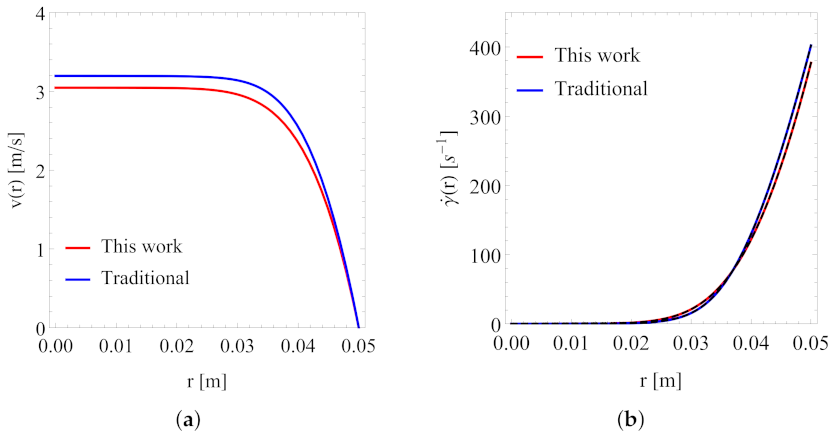
3.2. Isothermal Flow in a Tube
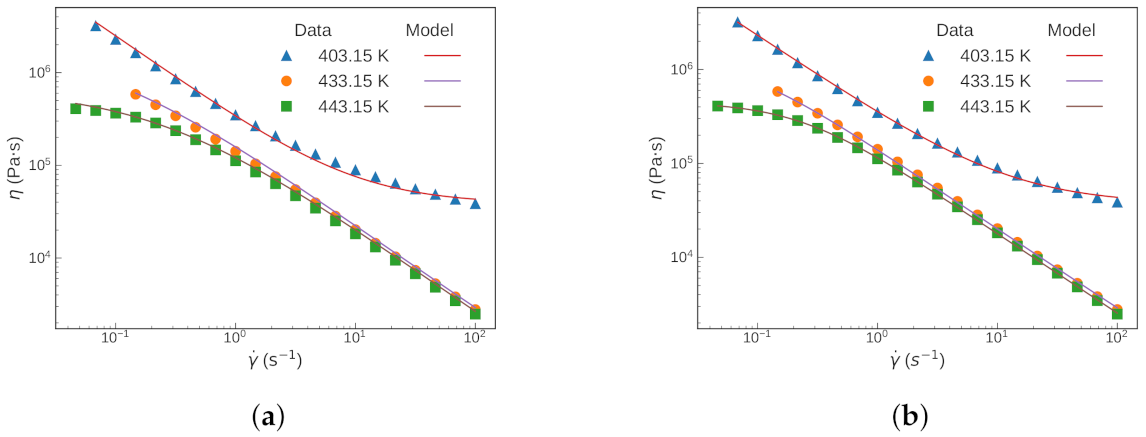
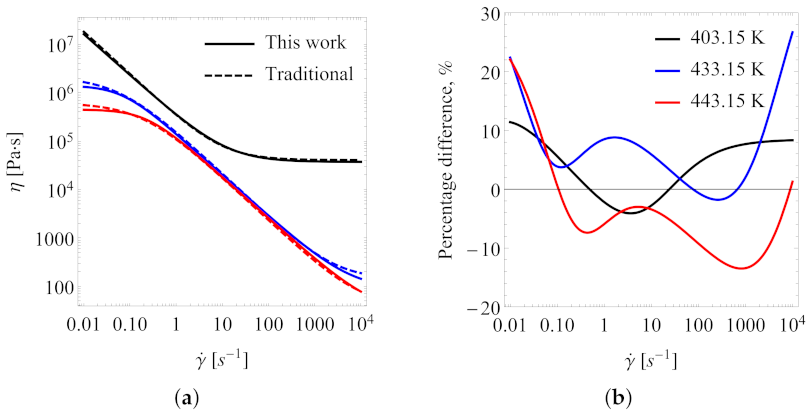
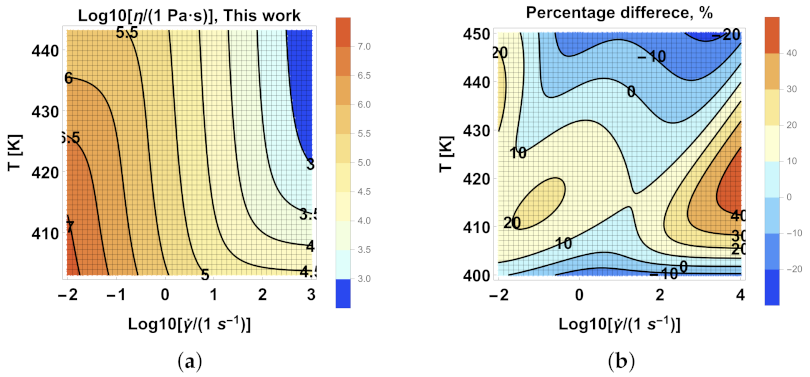
3.3. Shear Viscosity as a Function of the Rate of Shear and Temperature
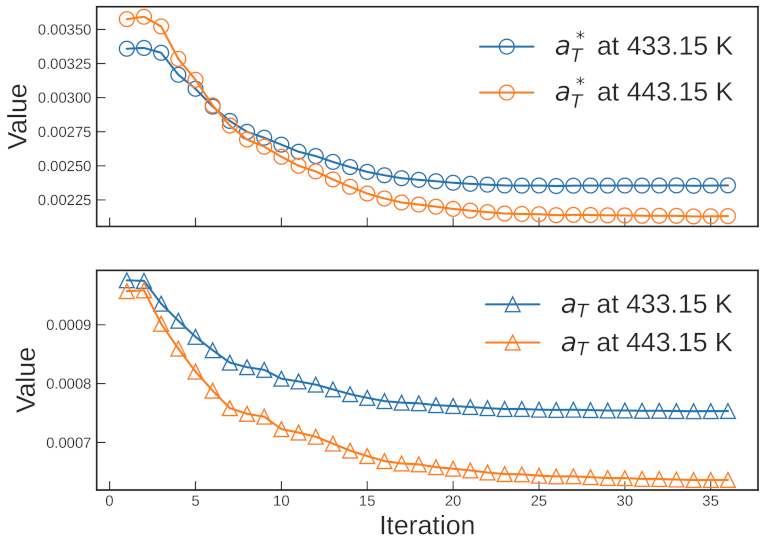
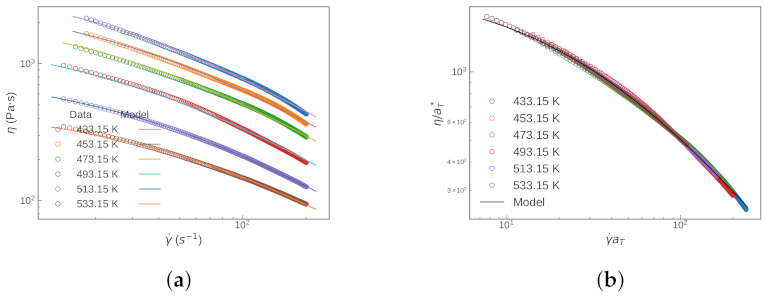
3.4. Nonlinear Regression: Proof of Concept for Scenario 2
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AIC | Akaike Information Criterion |
| BIC | Bayesian Information Criterion |
| CY | Carreau–Yasuda |
| LM | Levenberg–Marquardt |
| PD | percentage error between two predicted values |
| RMSE | root mean squared error |
| TNC | Truncated–Newton |
| TTS | time–temperature superposition |
References
- Bird, R.B.; Armstrong, R.C.; Hassager, O. Dynamics of Polymeric Liquids, 2nd ed.; John Wiley & Sons: New York, NY, USA, 1987; Volume 1. [Google Scholar]
- Wapperom, P.; Hassager, O. Numerical Simulation of Wire-Coating: The Influence of Temperature Boundary Conditions. Polym. Eng. Sci. 1999, 39, 2007–2018. [Google Scholar] [CrossRef]
- Tofteberg, T.; Andreassen, E. Simulation of injection molding of micro-featured polymer components. In Proceedings of the MekIT’07: Fourth National Conference on Computational Mechanics, Trondheim, Norway, 23–24 May 2007; p. S4104. [Google Scholar]
- Kadijk, S.; Van Den Brule, B.H.A.A. On The Pressure Dependency of The Viscosity of Molten Polymers. Polym. Eng. Sci. 1994, 34, 2007–2018. [Google Scholar] [CrossRef]
- Amangeldi, M.; Wei, D.; Perveen, A.; Zhang, D. Numerical Modeling of Thermal Flows in Entrance Channels for Polymer Extrusion: A Parametric Study. Processes 2020, 8, 1256. [Google Scholar] [CrossRef]
- Razeghiyadaki, A.; Zhang, D.; Wei, D.; Perveen, A. Optimization of polymer extrusion die based on response surface method. Processes 2020, 8, 1043. [Google Scholar] [CrossRef]
- Igali, D.; Perveen, A.; Zhang, D.; Wei, D. Shear Rate Coat-Hanger Die Using Casson Viscosity Model. Processes 2020, 8, 1524. [Google Scholar] [CrossRef]
- Razeghiyadaki, A.; Wei, D.; Perveen, A.; Zhang, D. A Multi-Rheology Design Method of Sheeting Polymer Extrusion Dies Based on Flow Network and the Winter–Fritz Design Equation. Polymers 2021, 13, 1924. [Google Scholar] [CrossRef]
- Singh, P.; Soulages, J.; Ewoldt, R. On Fitting Data for Parameter Estimates: Residual Weighting and Data Representation. Rheol. Acta 2019, 58, 341–359. [Google Scholar] [CrossRef]
- Gallagher, M.T.; Wain, R.A.J.; Dari, S.; Whitty, J.P.; Smith, D.J. Non-identifiability of Parameters for a Class of Shear-Thinning Rheological Models With Implications for Haematological Fluid Dynamics. J. Biomech. 2019, 85, 230–238. [Google Scholar] [CrossRef]
- Nocedal, J.; Wright, S.J. Numerical Optimization, 1st ed.; Springer: New York, NY, USA, 1999. [Google Scholar]
- Gavin, H.P. The Levenberg–Marquardt Algorithm for Nonlinear Least Squares Curve-Fitting Problems; Department of Civil and Environmental Engineering, Duke University: Durham, Germany, 2019; pp. 1–19. [Google Scholar]
- Kim, S.; Lee, J.; Kim, S.; Cho, K.S. Applications of Monte Carlo method to nonlinear regression of rheological data. Korea Aust. Rheol. J. 2018, 30, 21–28. [Google Scholar] [CrossRef]
- Helleloid, G.T. On the Computation of Viscosity-Shear Rate Temperature Master Curves for Polymeric Liquids. Morehead Electron J. Appl. Math. 2001, 1, 1–11. [Google Scholar]
- Naya, S.; Meneses, A.; Tarrio-Saavedra, J.; Artiaga, R.; Lopez-Beceiro, J.; Gracia-Fernandez, C. New Method for Estimating Shift Factors in Time–Temperature Superposition Models. J. Therm. Anal. Calorim. 2013, 113, 453–460. [Google Scholar] [CrossRef]
- Venczel, M.; Bognár, G.; Veress, Á. Temperature-Dependent Viscosity Model for Silicone Oil and Its Application in Viscous Dampers. Processes 2021, 9, 331. [Google Scholar] [CrossRef]
- Rooki, R.; Ardejani, F.; Moradzadeh, A.; Mirzaei, H.; Kelessidis, V.; Maglione, R.; Norouzi, M. Optimal determination of rheological parameters for Herschel-Bulkley drilling fluids using genetic algorithms (GAs). Korea-Aust. Rheol. J. 2012, 24, 163–170. [Google Scholar] [CrossRef]
- Magnon, E.; Cayeux, E. Precise Method to Estimate the Herschel-Bulkley Parameters from Pipe Rheometer Measurements. Fluids 2021, 6, 157. [Google Scholar] [CrossRef]
- Osswald, T.A.; Rudolph, N. Polymer Rheology: Fundamentals and Applications; Hanser Publishers: Munich, Germany, 2014. [Google Scholar]
- Ferry, J.D. Viscoelastic Properties of Polymers, 3rd ed.; John Wiley & Sons: New York, NY, USA, 1980. [Google Scholar]
- Cho, K.S. Viscoelasticity of Polymers: Theory and Numerical Algorithms, 1st ed.; Springer: New York, NY, USA, 2016. [Google Scholar]
- Dealy, J.; Plazek, D. Time-Temperature Superposition—A Users Guide. Rheol. Bull. 2009, 78, 16–31. [Google Scholar]
- Boudara, V.A.H.; Read, D.J.; Ramírez, J. Reptate rheology software: Toolkit for the analysis of theories and experiments. J. Rheol 2020, 64, 709–722. [Google Scholar] [CrossRef] [Green Version]
- Shaw, M.T. Introduction to Polymer Rheology; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Newville, M.; Stensitzki, T.; Allen, D.B.; Rawlik, M.; Ingargiola, A.; Nelson, A. Lmfit: Non-Linear Least-Square Minimization and Curve-Fitting for Python. Zenodo 2016. [Google Scholar] [CrossRef]
- Akaike, H. A New Look at The Statistical Model Identification. IEEE Trans. Autom. Control 1974, 19, 716–723. [Google Scholar] [CrossRef]
- Schwarz, G.E. Estimating the Dimension of a Model. Ann. Stat. 1978, 6, 461–464. [Google Scholar] [CrossRef]
- Raju, N.S.; Bilgic, R.; Edwards, J.E.; Fleer, P.F. Methodology Review: Estimation of Population Validity and Cross-Validity, and the Use of Equal Weights in Prediction. Appl. Psychol. Meas. 1997, 21, 291–305. [Google Scholar] [CrossRef]
- Hyndman, R.J.; Koehler, A.B. Another Look at Measures of Forecast Accuracy. Int. J. Forecast. 2006, 22, 679–688. [Google Scholar] [CrossRef] [Green Version]
- Huang, Q.; Mednova, O.; Rasmussen, H.K.; Alvarez, N.J.; Skov, A.L.; Almdal, K.; Hassager, O. Concentrated Polymer Solutions are Different from Melts: Role of Entanglement Molecular Weight. Macromolecules 2013, 46, 5026–5035. [Google Scholar] [CrossRef]
- Cox, W.P.; Mertz, E.H. Correlation of Dynamic and Steady Flow Viscosities. J. Polym. Sci. 1958, 28, 619–622. [Google Scholar] [CrossRef]
- Osswald, T.A. Understanding Polymer Processing: Processes and Governing Equations, 2nd ed.; Carl Hanser Verlag GmbH & Co. KG.: Munich, Germany, 2017. [Google Scholar]
- Wang, Y. Steady Isothermal Flow of a Carreau-Yasuda Model Fluid in a Straight Circular Tube. J. Non–Newton. Fluid Mech. 2021. submitted. [Google Scholar]
- Lomellini, P. Williams-Landel-Ferry versus Arrhenius Behaviour: Polystyrene Melt Viscoelasticity Revised. Polymer 1992, 33, 4983–4989. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | 1 | 2 | … | 37 |
|---|---|---|---|---|
| 40,476.13 | 40,476.32 | … | 37,190.11 | |
| 598,346,954.87 | 598,346,954.87 | … | 598,346,954.87 | |
| a | … | |||
| n | … | |||
| … | ||||
| ( K) | 1 | 1 | … | 1 |
| ( K) | 1 | 1 | … | 1 |
| ( K) | … | |||
| ( K) | … | |||
| ( K) | … | |||
| ( K) | … | |||
| AIC | … | |||
| BIC | … | |||
| … |
| Model by | AIC | BIC | RMSE | |
|---|---|---|---|---|
| Traditional approach using LM | −331.12 | −320.74 | 0.9976 | 0.0585 |
| Traditional method (with TNC) | −413.93 | −403.54 | 0.9994 | 0.0318 |
| Global algorithm: Scenario 1 (our method) | −486.74 | −476.35 | 0.9998 | 0.0148 |
| Model by | (K) | (K) | ||
|---|---|---|---|---|
| Traditional method | 8.7065088 | 7.97907227 | 76.4700812 | 67.72598488 |
| Global algorithm: Scenario 1 | 7.1865105 | 7.78847416 | 52.04696748 | 57.46612279 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amangeldi, M.; Wang, Y.; Perveen, A.; Zhang, D.; Wei, D. An Iterative Approach for the Parameter Estimation of Shear-Rate and Temperature-Dependent Rheological Models for Polymeric Liquids. Polymers 2021, 13, 4185. https://0-doi-org.brum.beds.ac.uk/10.3390/polym13234185
Amangeldi M, Wang Y, Perveen A, Zhang D, Wei D. An Iterative Approach for the Parameter Estimation of Shear-Rate and Temperature-Dependent Rheological Models for Polymeric Liquids. Polymers. 2021; 13(23):4185. https://0-doi-org.brum.beds.ac.uk/10.3390/polym13234185
Chicago/Turabian StyleAmangeldi, Medeu, Yanwei Wang, Asma Perveen, Dichuan Zhang, and Dongming Wei. 2021. "An Iterative Approach for the Parameter Estimation of Shear-Rate and Temperature-Dependent Rheological Models for Polymeric Liquids" Polymers 13, no. 23: 4185. https://0-doi-org.brum.beds.ac.uk/10.3390/polym13234185