
Remote Sensing Extraction of Crown Planar Area and Plant Number of Papayas Using UAV Images with Very High Spatial Resolution
 , and
, and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Technical Route
- (1)
- Acquire the UAV image and field survey data. First, the UAV flight tasks for photos of the papaya orchard will be conducted and RGB images from the obtained photos will be generated. Then, investigate the growth status of papaya in the orchard. The details of this step are presented in Section 2.3.
- (2)
- Analyze the spectral characteristics of different objects in the RBG image to determine whether vegetation indices could be used to separate papayas from other objects. The details of this step are presented in Section 2.4.
- (3)
- Calculate the relevant vegetation indices and compare the differences of these vegetation indices in terms of separating papaya, weed, soil, and mulch film in the orchard. The details of this step are presented in Section 2.5.
- (4)
- Compare the low-pass filter and the high-pass filter for enhancement of the UAV image. The details of this step are presented in Section 2.6.
- (5)
- Perform image segmentation to extract information on tree crown and tree number. The details of this step are presented in Section 2.7.
- (6)
- Evaluate the accuracy of the information extraction. The details of this step are presented in Section 2.8.
2.3. Image Data Acquisition and Preprocessing
2.4. Data Feature Analysis
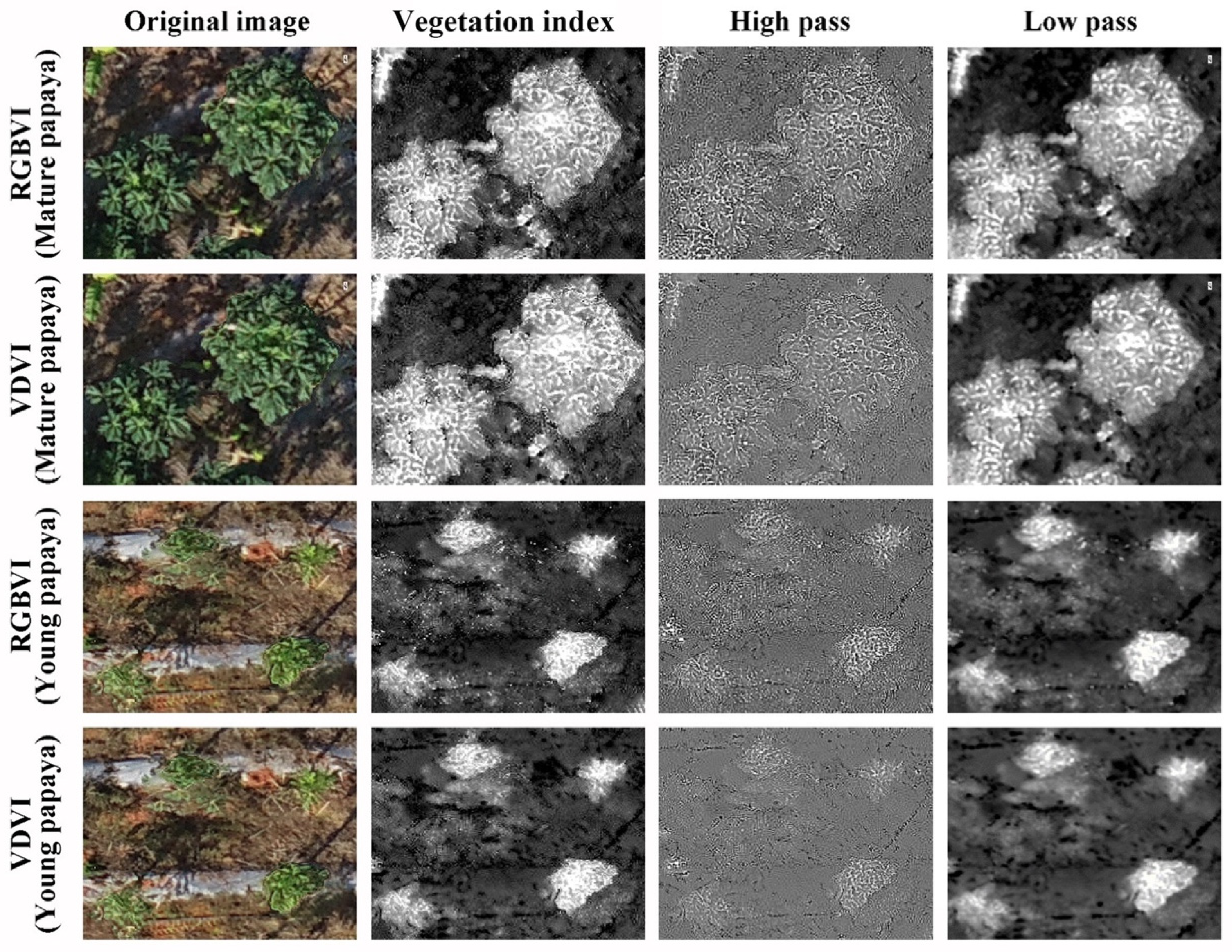
2.5. Vegetation Indices for the Feature Analysis
2.6. Frequency Enhancement
2.7. Image Segmentation
2.7.1. Otsu’s Method
2.7.2. Mean–Standard Deviation Threshold Method
2.8. Accuracy Evaluation
3. Results
3.1. Data Feature
3.2. Comparison of Vegetation Indices
3.3. Image Filtering Enhancement
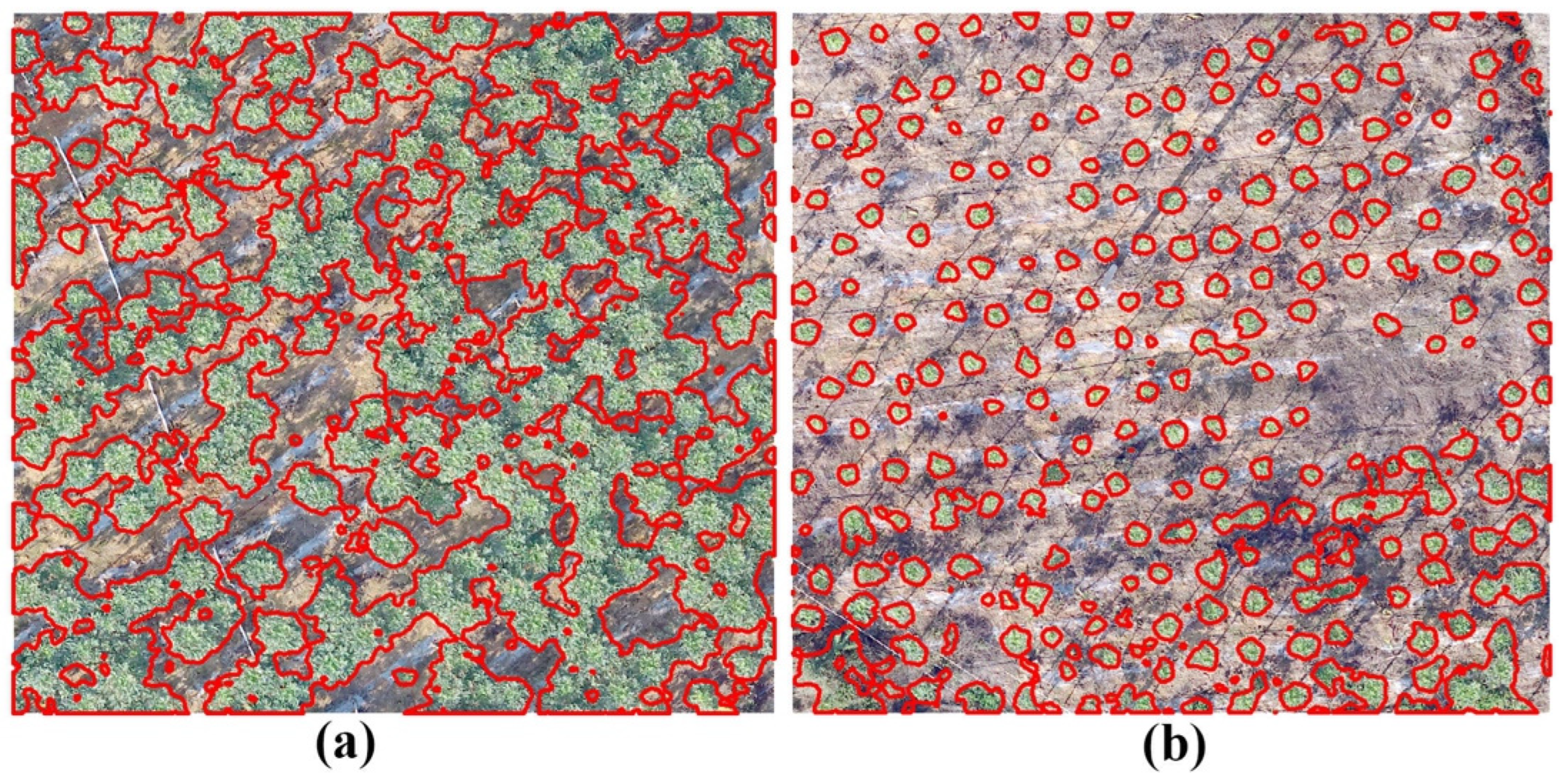
3.4. Crown Extraction
3.5. Papaya Number Extraction
3.6. Accuracy of the Extraction
4. Discussion
4.1. Vegetation Index
4.2. Convolution Kernel Size
4.3. MSDT Method
4.4. Applicability of the Developed Method
- (1)
- Calculate the VDVI of the target area.
- (2)
- Enhance the target features of the papayas and smooth the soil and scattered weeds using the low-pass filter with a convolution kernel size of 23 pixels.
- (3)
- Use Otsu’s method to obtain the threshold that maximized the inter-class variance for image segmentation to extract the papaya crowns.
- (4)
- Use a threshold of an average crown planar area of 2 m2 for single mature papayas to classify the crown patches into single and crown-connecting papayas.
- (5)
- Use the MSDT method (n = 0 for single young trees, n = 1 for single mature trees, and n = 1.4 for crown-connecting mature papayas) to count the number of papaya plants.
4.5. Outlook
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Qin, Q. Research progress on application value and development of papaya. Food Ind. 2017, 38, 234–237. [Google Scholar]
- Tsoulias, N.; Paraforos, D.S.; Fountas, S.; Zude-Sasse, M. Estimating canopy parameters based on the stem position in apple trees using a 2D Lidar. Agronomy 2019, 9, 740. [Google Scholar] [CrossRef]
- Modica, G.; Messina, G.; Luca, G.D.; Fiozzo, V.; Praticò, S. Monitoring the vegetation vigor in heterogeneous citrus and olive orchards. A multiscale object-based approach to extract trees’ crowns from UAV multispectral imagery. Comput. Electron. Agric. 2020, 175, 105500. [Google Scholar] [CrossRef]
- Chen, R.; Zhang, C.; Xu, B.; Zhu, T.; Zhao, F.; Han, S.; Yang, G.; Yang, H. Predicting individual apple tree yield using UAV multi-source remote sensing data and ensemble learning. Comput. Electron. Agric. 2022, 201, 107275. [Google Scholar] [CrossRef]
- Sola-Guirado, R.R.; Castillo-Ruiz, F.J.; Jimenez-Jimenez, F.; Blanco-Roldan, G.L.; Castro-Garcia, S.; Gil-Ribes, J.A. Olive actual on year yield forecast tool based on the tree canopy geometry using UAS imagery. Sensors 2017, 17, 1743. [Google Scholar] [CrossRef] [PubMed]
- Huang, Q.; Feng, J.; Gao, M.; Lai, S.; Han, G.; Qin, Z.; Fan, J.; Huang, Y. Precise estimation of sugarcane yield at field scale with allometric variables retrieved from UAV Phantom 4 RTK images. Agronomy 2024, 14, 476. [Google Scholar] [CrossRef]
- Alexopoulos, A.; Koutras, K.; Ali, S.B.; Puccio, S.; Carella, A.; Ottaviano, R.; Kalogeras, A. Complementary use of ground-based proximal sensing and airborne/spaceborne remote sensing techniques in precision agriculture: A Systematic Review. Agronomy 2023, 13, 1942. [Google Scholar] [CrossRef]
- Narvaez, F.Y.; Reina, G.; Torres-Torriti, M.; Kantor, G.; Cheein, F.A. A survey of ranging and imaging techniques for precision agriculture phenotyping. IEEE-ASME T. Mech. 2017, 22, 2428–2439. [Google Scholar] [CrossRef]
- Santoro, F.; Tarantino, E.; Figorito, B.; Gualano, S.; D’Onghia, A.M. A tree counting algorithm for precision agriculture tasks. Int. J. Digit. Earth 2013, 6, 94–102. [Google Scholar] [CrossRef]
- Xu, W.; Yang, F.; Ma, G.; Wu, J.; Wu, J.; Lan, Y. Multiscale inversion of Leaf Area Index in citrus tree by merging UAV LiDAR with multispectral remote sensing data. Agronomy 2023, 13, 2747. [Google Scholar] [CrossRef]
- Wang, Y.; Feng, C.; Ma, Y.; Chen, X.; Lu, B.; Song, Y.; Zhang, Z.; Zhang, R. Estimation of Nitrogen concentration in walnut canopies in southern Xinjiang based on UAV multispectral images. Agronomy 2023, 13, 1604. [Google Scholar] [CrossRef]
- Hobart, M.; Pflanz, M.; Weltzien, C.; Schirrmann, M. Growth height determination of tree walls for precise monitoring in apple fruit production using UAV photogrammetry. Remote Sens. 2020, 12, 1656. [Google Scholar] [CrossRef]
- Osco, L.P.; Arruda, M.D.S.D.; Marcato Junior, J.; da Silva, N.B.; Ramos, A.P.M.; Moryia, A.S.; Imai, N.N.; Pereira, D.R.; Creste, J.E.; Matsubara, E.; et al. A convolutional neural network approach for counting and geolocating citrus-trees in UAV multispectral imagery. ISPRS J. Photogramm. 2020, 160, 97–106. [Google Scholar] [CrossRef]
- Neupane, B.; Horanont, T.; Hung, N.D. Deep Learning based banana plant detection and counting using high-resolution red-green-blue (rgb) images collected from Unmanned Aerial Vehicle (UAV). PLoS ONE 2019, 14, e0223906. [Google Scholar] [CrossRef] [PubMed]
- Shi, Y.; Shen, L.; Chen, S.; He, R.; Wen, Z.; Liu, Y.; Mi, Z.; Su, B. Research on the extraction method of fruit tree canopy information based on low-altitude remote sensing. China Agric. Inform. 2022, 34, 1–10. [Google Scholar]
- Wu, J.; Yang, G.; Yang, H.; Zhu, Y.; Zhao, C. Extracting apple tree crown information from remote imagery using Deep Learning. Comput. Electron. Agric. 2020, 174, 105504. [Google Scholar] [CrossRef]
- Ye, Z.; Wei, J.; Lin, Y.; Guo, Q.; Zhang, J.; Zhang, H.; Deng, H.; Yang, K. Extraction of olive crown based on UAV visible images and the U2-Net Deep Learning model. Remote Sens. 2022, 14, 1523. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, X.; Chen, X. Identification of navel orange trees based on deep learning algorithm YOLOv4. Sci. Surv. Mapp. 2022, 47, 135–144. [Google Scholar]
- Zhang, Y.; Fang, X.; Guo, J.; Wang, L.; Tian, H.; Yan, K.; Lan, Y. CURI-YOLOv7: A light weight YOLOv7 tiny target detector for citrus trees from UAV remote sensing imagery based on embedded device. Remote Sens. 2023, 15, 4647. [Google Scholar] [CrossRef]
- Tu, Y.H.; Johansen, K.; Phinn, S.; Robson, A. Measuring canopy sructure and condition using multi-spectral UAS imagery in a horticultural environment. Remote Sens. 2019, 11, 269. [Google Scholar] [CrossRef]
- Xinyu, D.; Zhichao, Z.; Ruiyang, Y.; Qingjiu, T.; Xicun, Z. Extraction of Information about individual trees from high-spatial-resolution UAV-acquired Images ofan orchard. Remote Sens. 2020, 12, 133. [Google Scholar]
- Altieri, G.; Maffia, A.; Pastore, V.; Amato, M.; Celano, G. Use of high-resolution multispectral UAVs to calculate projected ground area in Corylus avellana L. tree orchard. Sensors 2022, 22, 7103. [Google Scholar] [CrossRef]
- Shu, M.; Li, S.; Wei, J.; Che, Y.; Li, B.; Ma, Y. Extraction of citrus crown parameters using UAV platform. Trans. CSAE 2021, 37, 68–76. [Google Scholar]
- Chen, R.; Li, C.; Yang, G.; Yang, H.; Xu, B.; Yang, X.; Zhu, Y.; Lei, L.; Zhang, C.; Dong, Z. Extraction of crown information from individual fruit tree by UAV LiDAR. Trans. CSAE 2020, 36, 50–59. [Google Scholar]
- Vélez, S.; Vacas, R.; Martín, H.; Ruano-Rosa, D.; Álvarez, S. A Novel Technique Using Planar Area and Ground Shadows Calculated from UAV RGB Imagery to Estimate Pistachio Tree (Pistacia vera L.) Canopy Volume. Remote Sens. 2022, 14, 6006. [Google Scholar] [CrossRef]
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P.; Chiteculo, V. Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2016, 38, 2392–2410. [Google Scholar] [CrossRef]
- Colaço, A.F.; Trevisan, R.G.; Molin, J.P.; Rosell-Polo, J.R.; Escolà, A. A method to obtain orange crop geometry information using a mobile terrestrial laser scanner and 3D modeling. Remote Sens. 2017, 9, 763. [Google Scholar] [CrossRef]
- Caruso, G.; Palai, G.; Tozzini, L.; Gucci, R. Using visible and thermal images by an Unmanned Aerial Vehicle to monitor the plant water status, canopy growth and yield of olive trees (cvs. Frantoio and Leccino) under different irrigation regimes. Agronomy 2022, 12, 1904. [Google Scholar] [CrossRef]
- Jiang, H.; Chen, S.; Li, D.; Wang, C.; Yang, J. Papaya tree detection with UAV images using a GPU-Accelerated Scale-Space Filtering method. Remote Sen. 2017, 9, 721. [Google Scholar] [CrossRef]
- Zhang, C.; Joao, V.; Lammert, K.; Guo, L.; Wang, W. Orchard management with small unmanned aerial vehicles: A survey of sensing and analysis approaches. Precis. Agric. 2021, 22, 2007–2052. [Google Scholar] [CrossRef]
- Zhu, M.; Zhou, Z.F.; Zhao, X.; Huang, D.H.; Jiang, Y. Identification and extraction method of pitaya individual plant in karst plateau canyon area based on UAV remote sensing. Trop. Geogr. 2019, 39, 502–511. [Google Scholar]
- Hunt, E.R.; Cavigelli, M.; Daughtry, C.S.T.; Mcmurtrey, J.E.; Walthall, C.L. Evaluation of digital photography from model aircraft for remote sensing of crop biomass and nitrogen status. Precis. Agric. 2005, 6, 359–378. [Google Scholar] [CrossRef]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley. Int. J. Appl. Earth. Obs. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Wang, X.; Wang, M.; Wang, S.; Wu, Y. Extraction of vegetation information from visible unmanned aerial vehicle images. Trans. Chin. Soc. Agric. Eng. 2015, 31, 152–159. [Google Scholar]
- Meng, D.; Zhao, J.; Lan, Y.; Yan, C.; Yang, D.; Wen, Y. SPAD inversion model of corn canopy based on UAV visible light image. Trans. Chin. Soc. Agric. Mach. 2020, 51, 366–374. [Google Scholar]
- Li, S.; Yuan, F.; Ata-Ui-Karim, S.T.; Zheng, H.; Cao, Q. Combining color indices and textures of UAV-based digital imagery for rice LAI estimation. Remote Sens. 2019, 11, 1763. [Google Scholar] [CrossRef]
- Wang, Y.; Zhou, Z.; Huang, D.; Zhang, T.; Zhang, W. Identifying and counting tobacco plants in fragmented terrains based on Unmanned Aerial Vehicle images in Beipanjiang, China. Sustainability 2022, 14, 8151. [Google Scholar] [CrossRef]
- Goutte, C.; Gaussier, E. A Probabilistic Interpretation of Precision, Recall and F-Score, with Implication for Evaluation. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2005; p. 952. [Google Scholar]
- Sokolova, M.; Japkowicz, N.; Szpakowicz, S. Beyond accuracy, F-score and ROC: A family of discriminant measures for performance evaluation. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2006; pp. 1015–1021. [Google Scholar]
- Zhao, G.; Sun, M.; Song, X.; Hao, Z.; Li, M.; Wu, H.; Liu, J.; Yu, K. A Comparative Study of Casuarina equisetifolia Number Extraction Methods Based on UAV Visible Light Remote Sensing Data. J. Southwest For. Univ. (Nat. Sci.) 2023, 43, 127–135. [Google Scholar]
- Rafael, C.G.; Richard, E.W. Frequency domain filtering. In Digital Image Processing, 3rd ed.; Ruan, Q.; Ruan, Y., Translators; Electronic Industry Press: Beijing, China, 2012; pp. 476–492. [Google Scholar]
- Li, Z.; Chen, Y.; Zhao, Y.; Zhu, L.; Lv, S.; Lu, J. Lung image segmentation and 3D reconstruction based on fitting normal distribution curve. Comput. Eng. Des. 2017, 38, 1277–1281. [Google Scholar]
- Yurtseven, M.; Akgul, S.; Coban, S.G. Determination and Accuracy Analysis of Individual Tree Crown Parameters Using UAV Based Imagery and OBIA Techniques. Measurement 2019, 145, 651–664. [Google Scholar] [CrossRef]
- Vélez, S.; Vacas, R.; Martín, H.; Ruano-Rosa, D.; Álvarez, S. High-resolution UAV RGB imagery dataset for precision agriculture and 3D photogrammetric reconstruction captured over a pistachio orchard (Pistacia vera L.) in Spain. Data 2022, 7, 157. [Google Scholar] [CrossRef]
- Hadas, E.; Jozkow, G.; Walicka, A.; Borkowski, A. Apple orchard inventory with a Lidar equipped Unmanned Aerial System. Int. J. Appl. Earth Obs. 2019, 82, 101911. [Google Scholar] [CrossRef]
- Domen, M.; Borut, Z. An efficient approach to 3D single tree-crown delineation in LiDAR data. ISPRS. J. Photogramm. 2015, 108, 219–233. [Google Scholar]
- Zhu, Z.; Christoph, K.; Nils, N. Assessing tree crown volume—A review. Forestry: An International Journal of Forest Research. Forestry 2021, 94, 18–35. [Google Scholar] [CrossRef]
- Martínez-Peña, R.; Vélez, S.; Vacas, R.; Martín, H.; Álvarez, S. Remote Sensing for Sustainable Pistachio Cultivation and Improved Quality Traits Evaluation through Thermal and Non-Thermal UAV Vegetation Indices. Appl. Sci. 2023, 13, 7716. [Google Scholar] [CrossRef]
- Ponce, J.M.; Aquino, A.; Tejada, D.; Alhadithi, B.M.; Andújar, J.M. A methodology for the automated delineation of crop tree crowns from UAV-based aerial imagery by means of morphological image analysis. Agronomy 2022, 12, 43. [Google Scholar] [CrossRef]
- Wang, K.; Zhou, J.; Zhang, W.; Zhang, B. Mobile Lidar scanning system combined with canopy morphology extracting methods for tree crown parameters evaluation in orchards. Sensors 2021, 21, 339. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research Area | Standard Plot | Crown Planar Area (m2) | Number (Papaya) |
|---|---|---|---|
| Experimental area | M1 | 380.44 | 229 |
| Y1 | 111.90 | 205 | |
| Verification area | M2 | 550.46 | 241 |
| Y2 | 150.19 | 228 |
| Item | Technical Specification |
|---|---|
| UAV type | DJI Phantom 4 RTK |
| Viewing angle | 90° to the ground |
| Image sensor | 1-inch CMOS, 20 million pixels |
| Camera lens | FOV 84°; 8.8 mm/24 mm: aperture f/2.8-f/11 |
| ISO scope | 100 |
| Camera focal length | 8.8 mm |
| Photo size in W/H ratio and pixels | W/H 4:3, 4864 × 3648 |
| Positioning accuracy | Vertical 1.5 cm + 1 ppm (RMS), Horizontal 1 cm + 1 ppm (RMS); Note: 1 ppm means that error increases 1 mm for 1 km movement of the vehicle |
| Duration of flight | 25 min |
| Date of the UAV flight campaigns | 15 December 2022 |
| UAV flight height | 55 m relative to the ground surface |
| Overlapping of imaging | 80% along flight direction and 70% between flight directions |
| Imaging number | 636 photos |
| Spatial resolution | 0.015 m at the central pixel of the photos |
| Land Object | NGRDI | RGBVI | VDVI | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | Std | CRD | Mean | Std | CRD | Mean | Std | CRD | |
| Papaya | 0.153 | 0.080 | - | 0.442 | 0.176 | - | 0.231 | 0.107 | - |
| Weed | 0.075 | 0.099 | 50.8% | 0.380 | 0.185 | 13.8% | 0.182 | 0.099 | 21.2% |
| Soil | −0.173 | 0.089 | 213.3% | 0.007 | 0.089 | 98.5% | −0.034 | 0.058 | 114.6% |
| Mulch film | 0.035 | 0.046 | 77.0% | 0.004 | 0.026 | 99.1% | −0.001 | 0.010 | 100.3% |
| Method | Papaya | Weed | ||||
|---|---|---|---|---|---|---|
| Mean | Std | CV | Mean | Std | CV | |
| RGBVI | 0.442 | 0.176 | 0.397 | 0.380 | 0.185 | 0.486 |
| RGBVI + low-pass | 0.442 | 0.131 | 0.296 | 0.378 | 0.145 | 0.384 |
| RGBVI + high-pass | 0.446 | 0.884 | 1.983 | 0.395 | 0.978 | 2.476 |
| VDVI | 0.231 | 0.107 | 0.466 | 0.182 | 0.099 | 0.546 |
| VDVI + low-pass | 0.230 | 0.079 | 0.343 | 0.180 | 0.080 | 0.444 |
| VDVI + high-pass | 0.232 | 0.556 | 2.393 | 0.193 | 0.504 | 2.611 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lai, S.; Ming, H.; Huang, Q.; Qin, Z.; Duan, L.; Cheng, F.; Han, G. Remote Sensing Extraction of Crown Planar Area and Plant Number of Papayas Using UAV Images with Very High Spatial Resolution. Agronomy 2024, 14, 636. https://0-doi-org.brum.beds.ac.uk/10.3390/agronomy14030636
Lai S, Ming H, Huang Q, Qin Z, Duan L, Cheng F, Han G. Remote Sensing Extraction of Crown Planar Area and Plant Number of Papayas Using UAV Images with Very High Spatial Resolution. Agronomy. 2024; 14(3):636. https://0-doi-org.brum.beds.ac.uk/10.3390/agronomy14030636
Chicago/Turabian StyleLai, Shuangshuang, Hailin Ming, Qiuyan Huang, Zhihao Qin, Lian Duan, Fei Cheng, and Guangping Han. 2024. "Remote Sensing Extraction of Crown Planar Area and Plant Number of Papayas Using UAV Images with Very High Spatial Resolution" Agronomy 14, no. 3: 636. https://0-doi-org.brum.beds.ac.uk/10.3390/agronomy14030636