
Summertime Assessment of an Urban-Scale Numerical Weather Prediction System for Toronto

 , ,
, ,
Abstract
:
1. Introduction
2. Materials and Methods
2.1. NWP Systems
2.1.1. Overview


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | RDPS | HRDPS | TOR-GEM1000 | TOR-GEM250 |
|---|---|---|---|---|
| Grid spacing | 10 km | 2.5 km | 1 km | 250 m |
| Vertical levels below 2 km | 13 | 13 | 28 | 28 |
| First momentum level | 40 m | 40 m | 10 m | 10 m |
| Time step | 450 s | 60 s | 30 s | 12 s |
| Output Frequency | 1 h | 30 min | 15 min | 15 min |
| Land surface schemes | ISBA 1 | ISBA | ISBA + TEB 2 | ISBA + TEB |
| Microphysics | diagnostic scheme 3 | double moment 4 | double moment 4 | double moment 4 |
| Planetary boundary-layer | parameterization 5 | parameterization 5 | parameterization 5 | parameterization 5 |
| Max. turbulence mixing length (neutral) | 200 m | 200 m | 200 m | 57.5 m |
| Boundary-layer clouds | parameterization 5 | parameterization 5 | parameterization 5 | parameterization 5 |
| Shallow convection | parameterization 6 | parameterization 6 | parameterization 6 | parameterization 6 |
| Deep convection | parameterization 7 | explicit | explicit | explicit |
| Radiation | parameterization 8 | parameterization 8 | parameterization 8 | parameterization 8 |
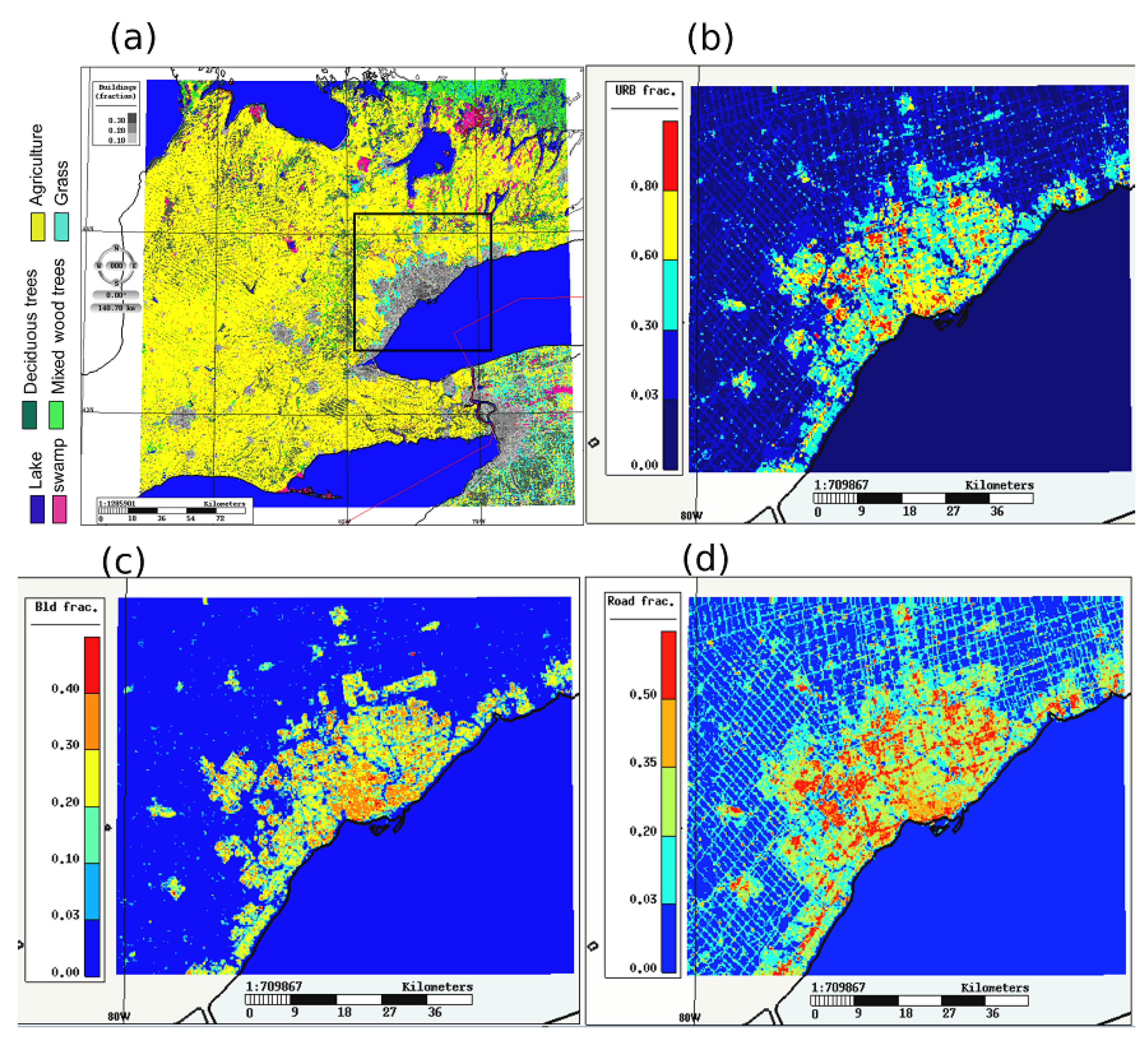
2.1.2. Surface Description
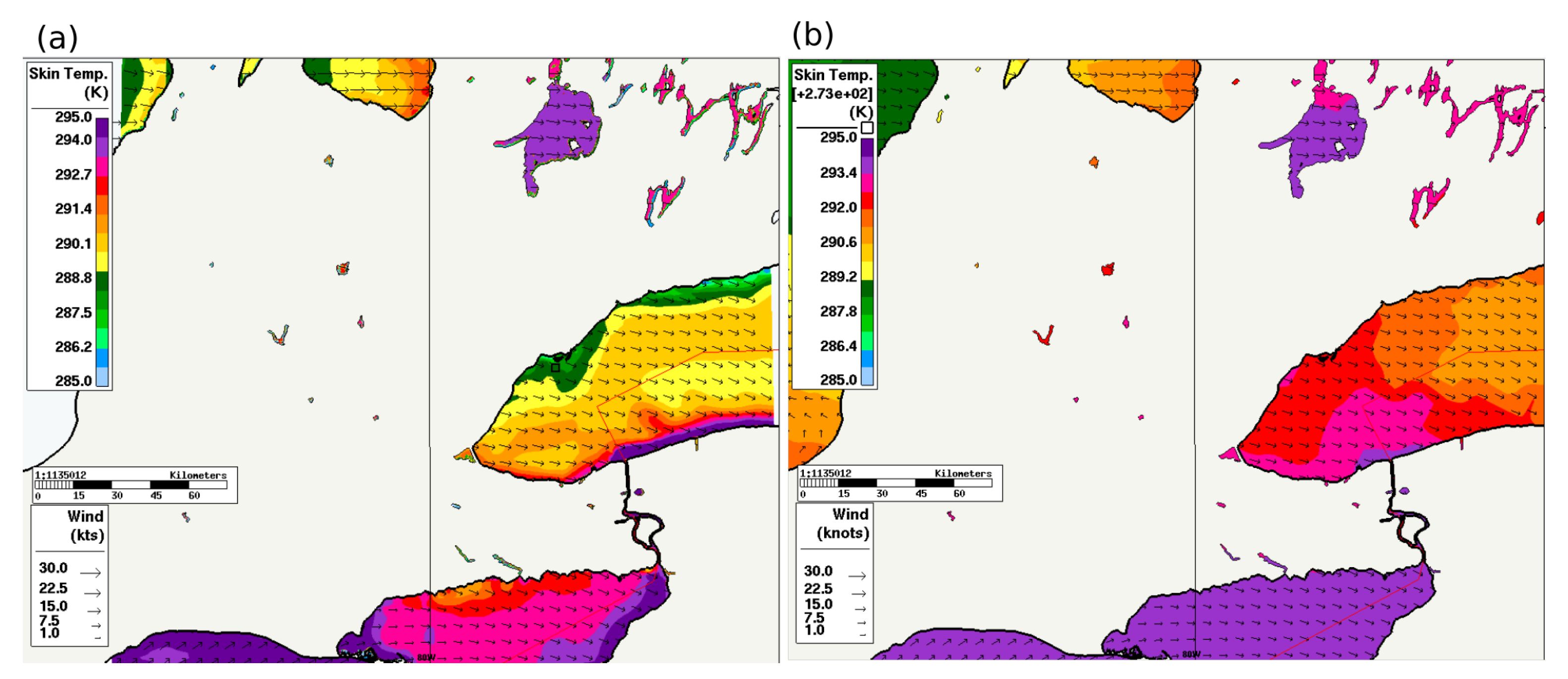
2.1.3. Water Surface Temperature
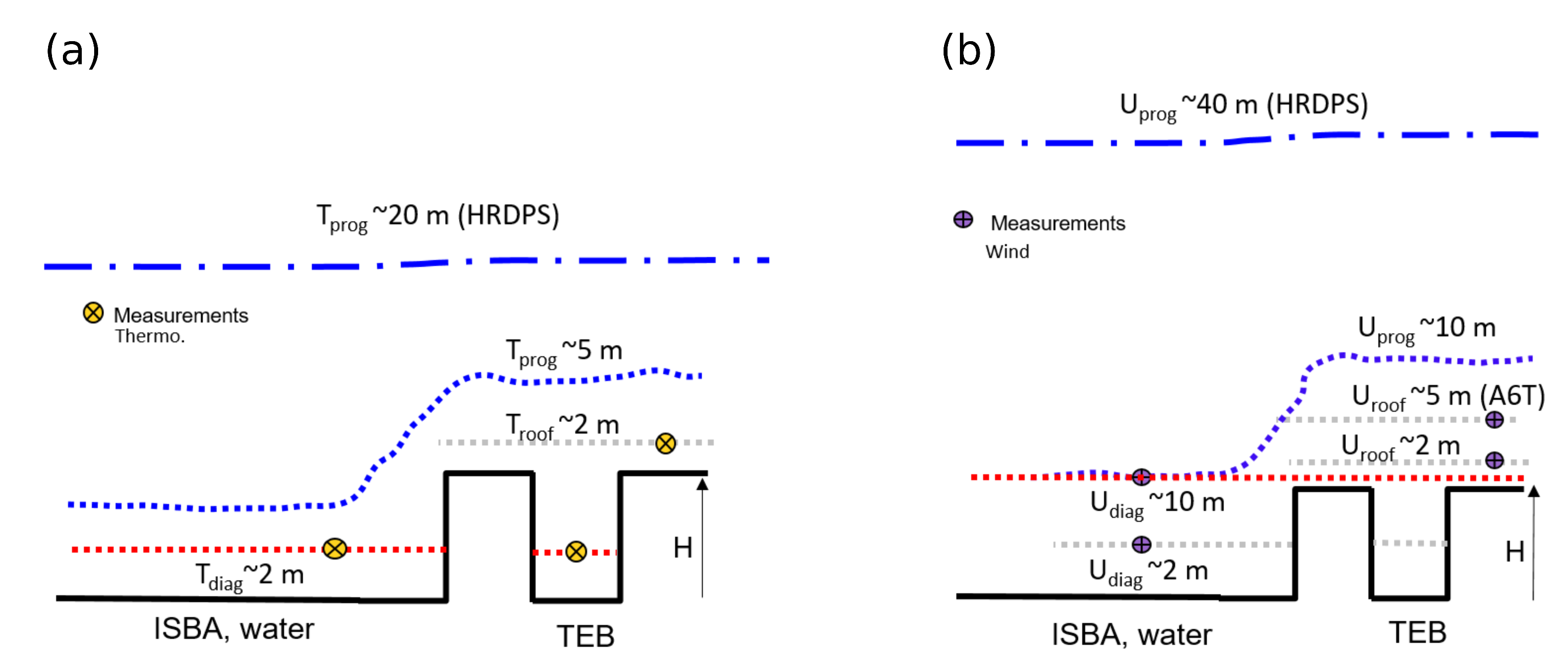
2.2. Comparison with Measurements
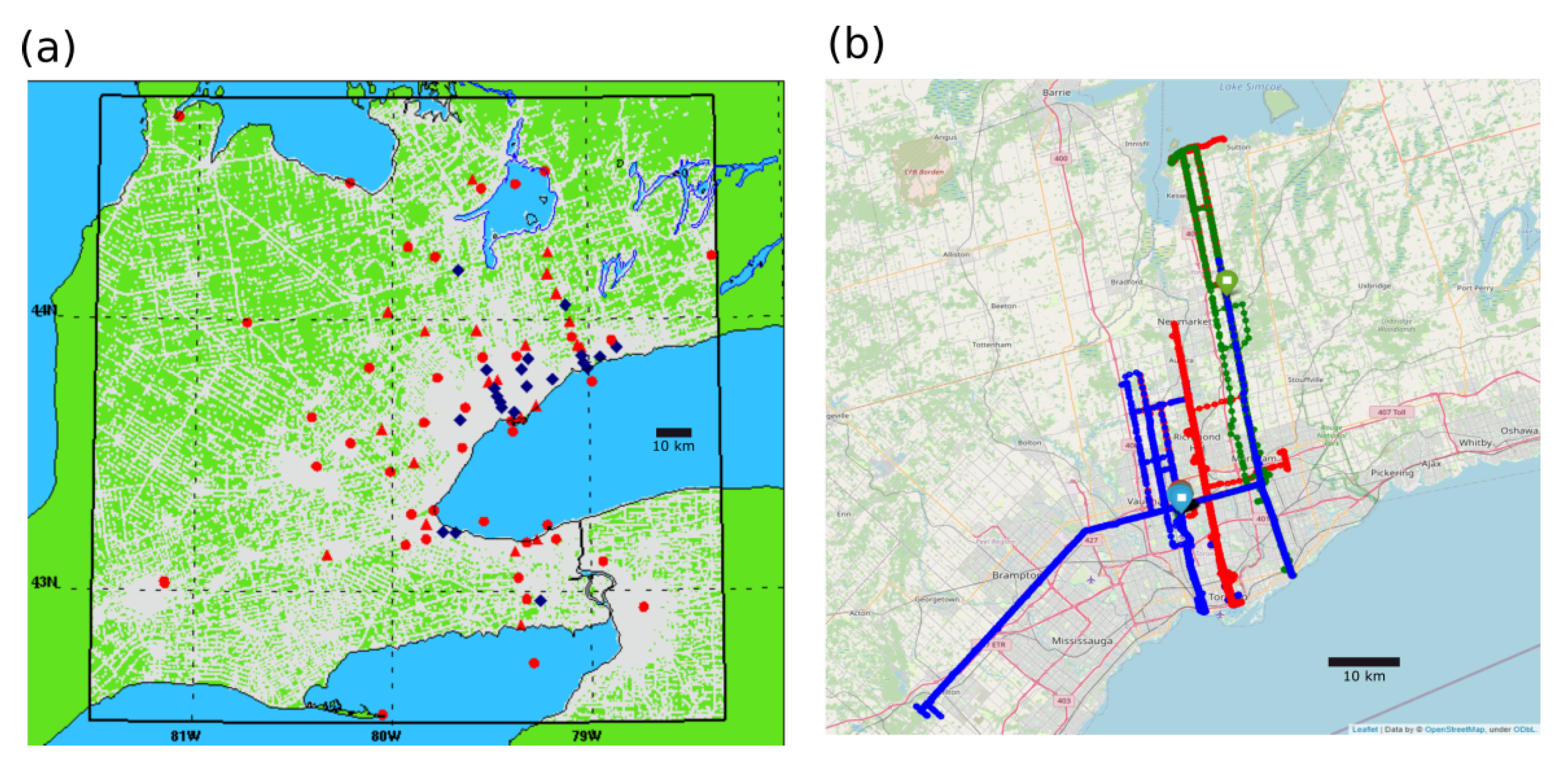
2.2.1. Surface Stations
2.2.2. Mobile Measurements
3. Results and Discussion
3.1. High-Resolution Weather Prediction
3.1.1. Coastal Upwelling
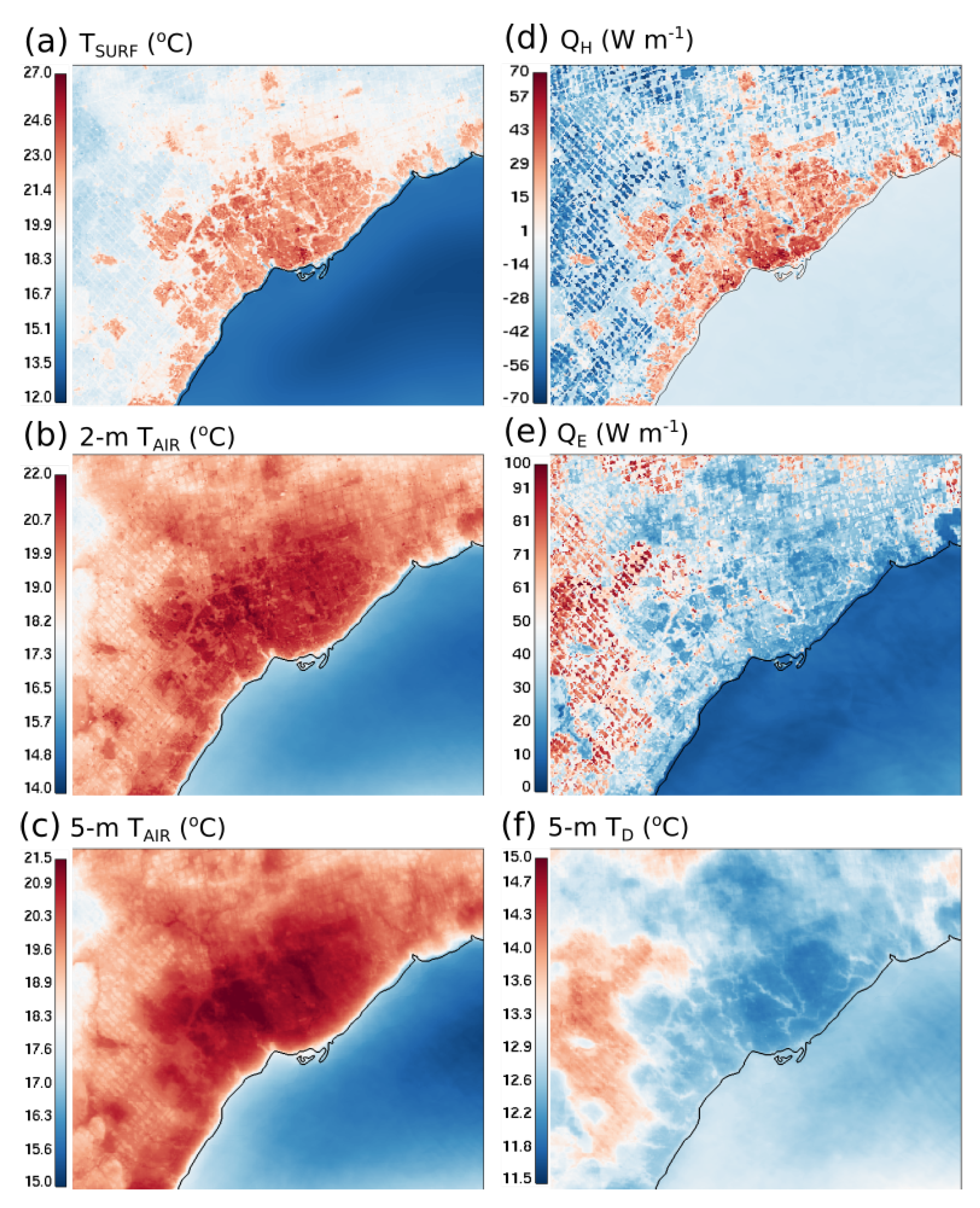
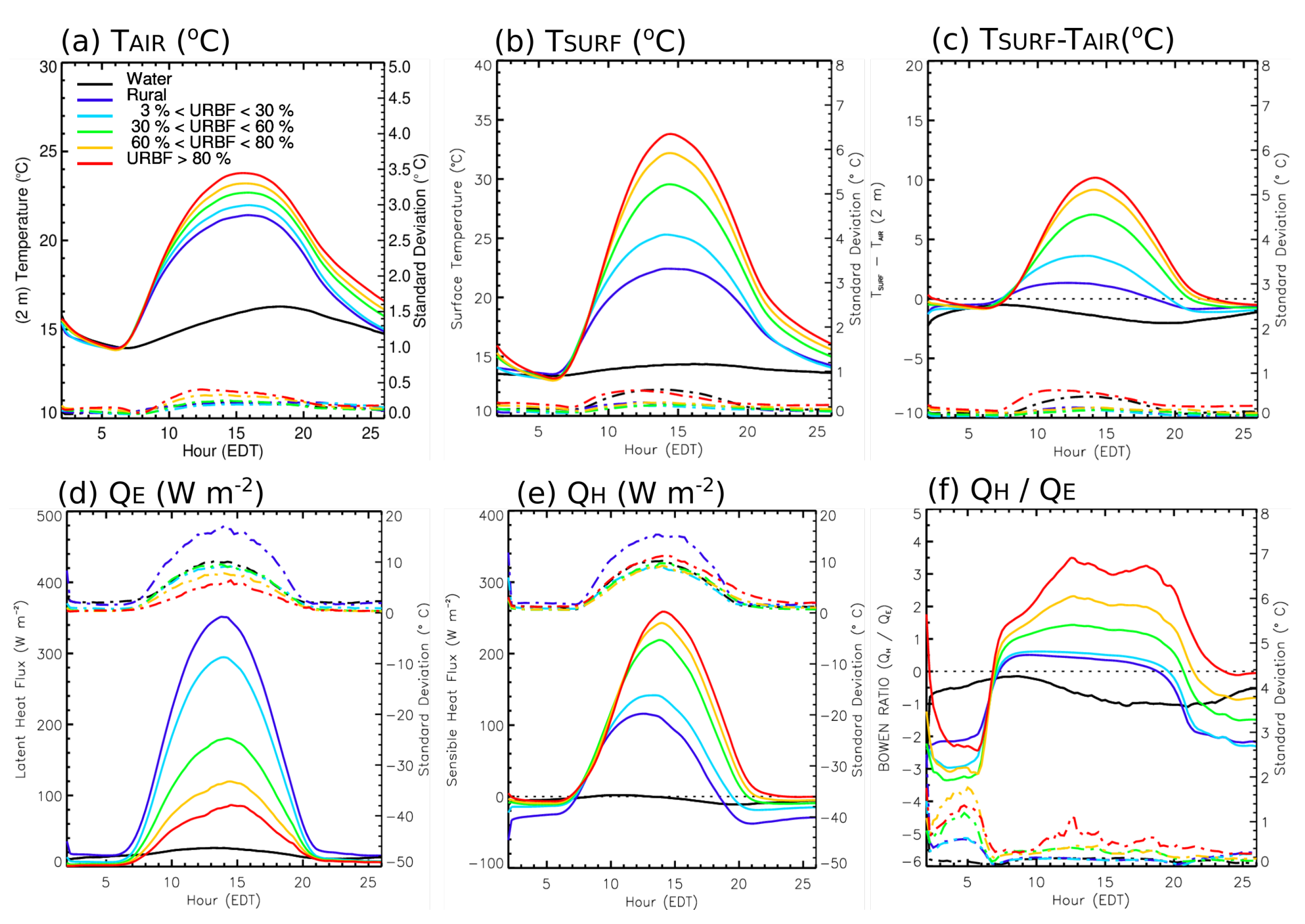
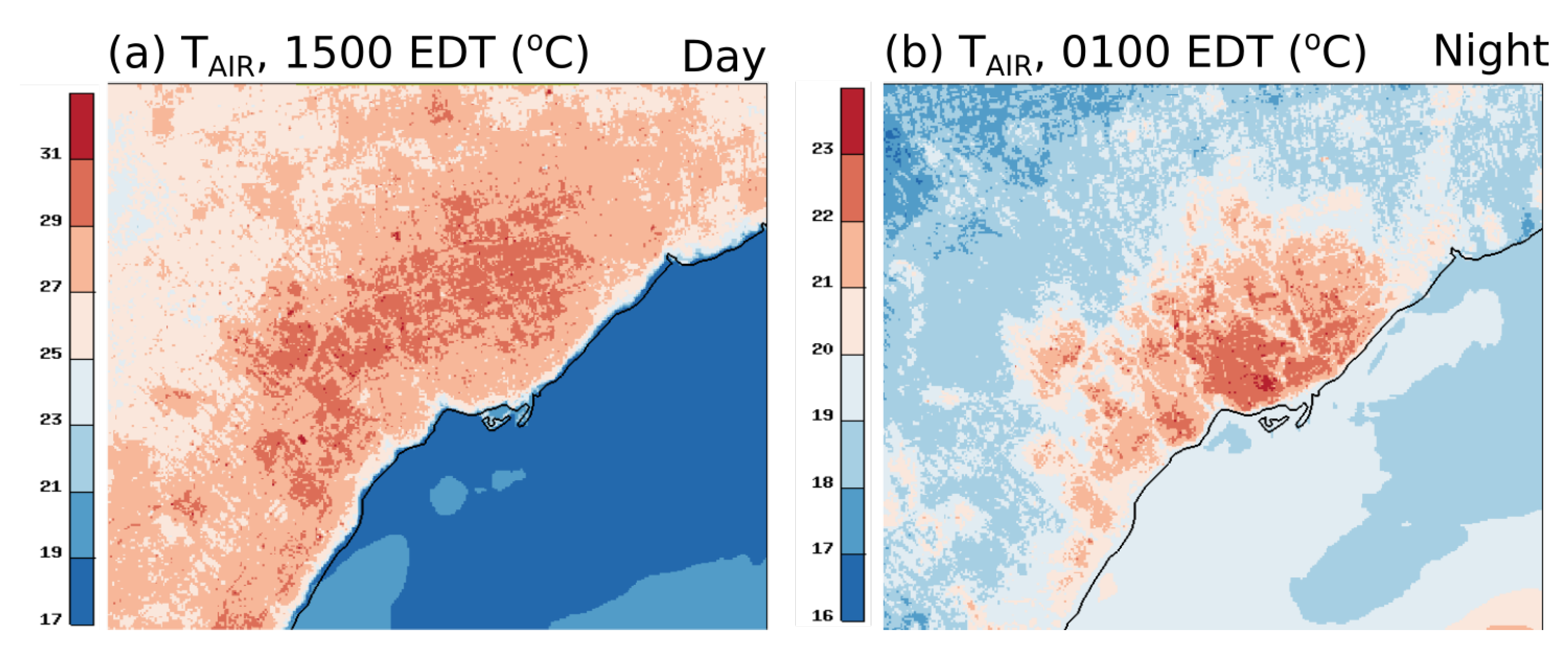
3.1.2. Urban-Scale Heterogeneity
3.1.3. Mesoscale Meteorology
3.2. Objective Evaluation
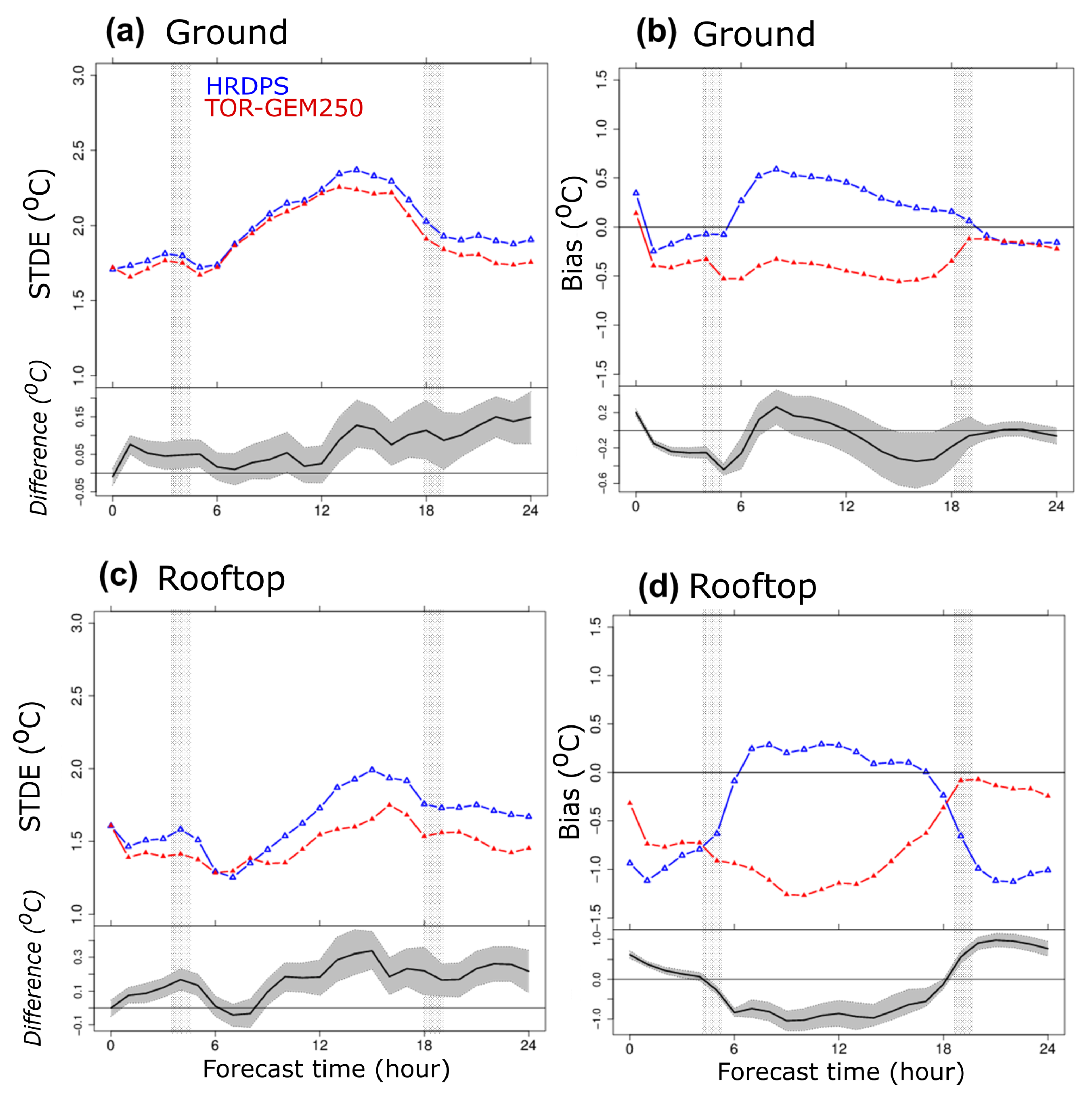
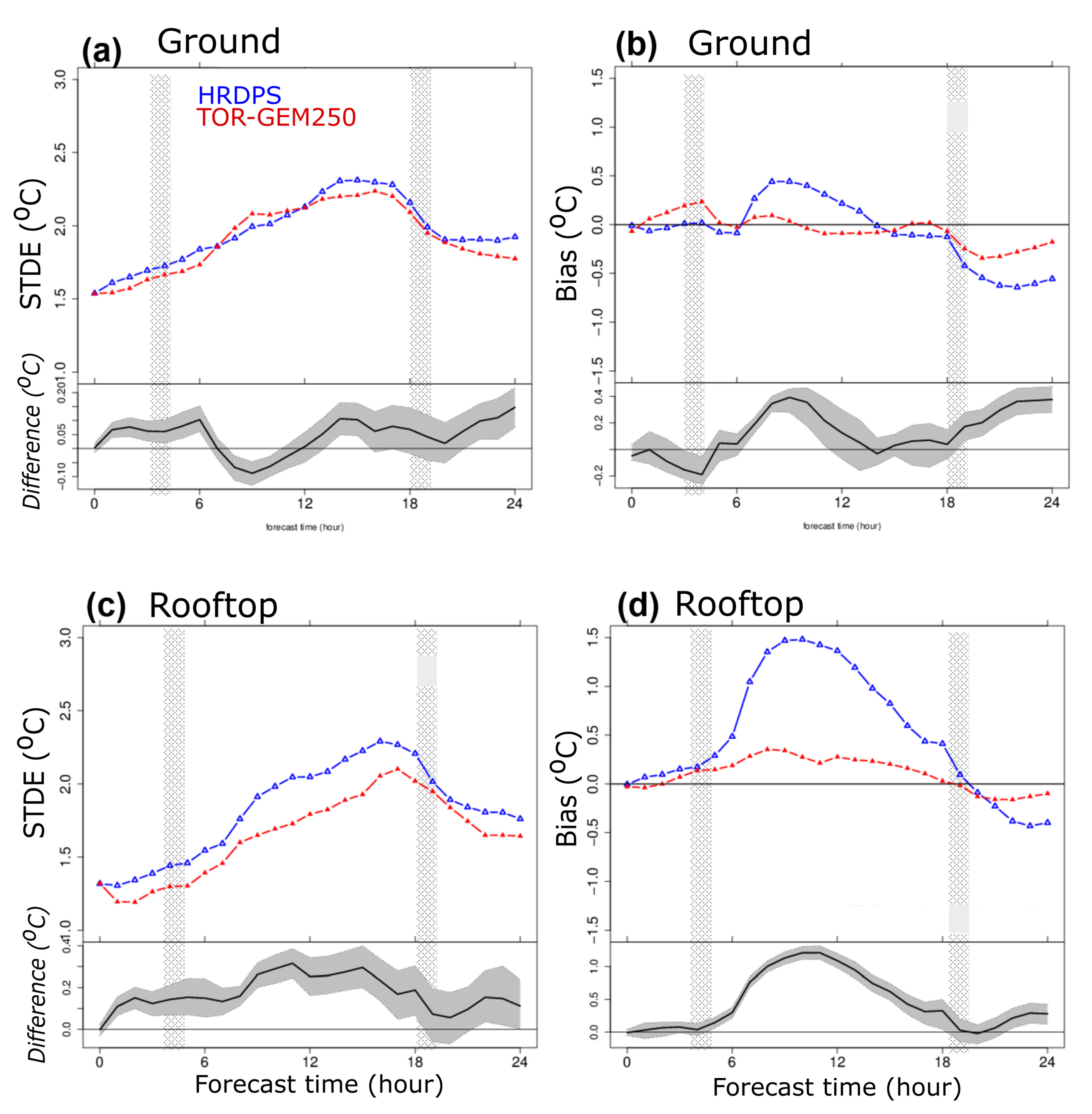
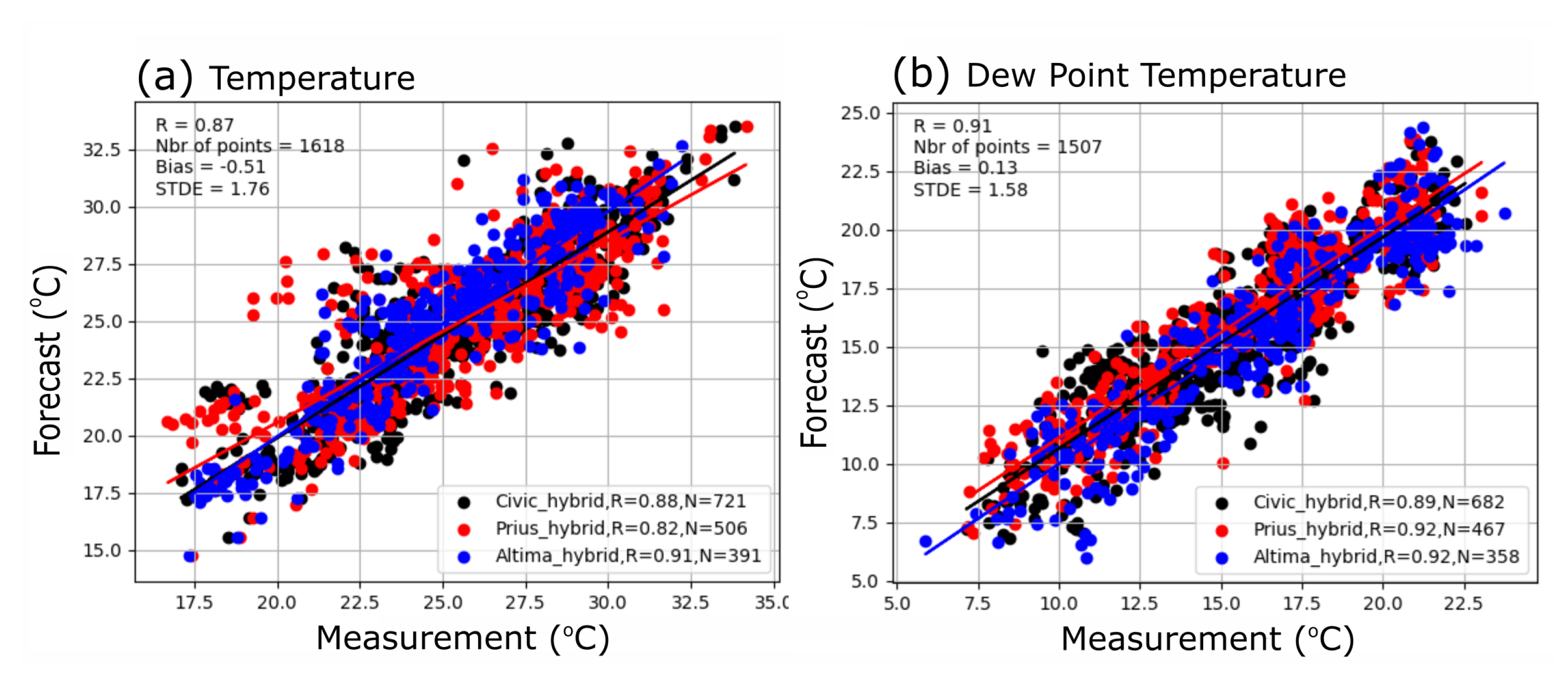
3.2.1. Temperature and Dew Point Temperature
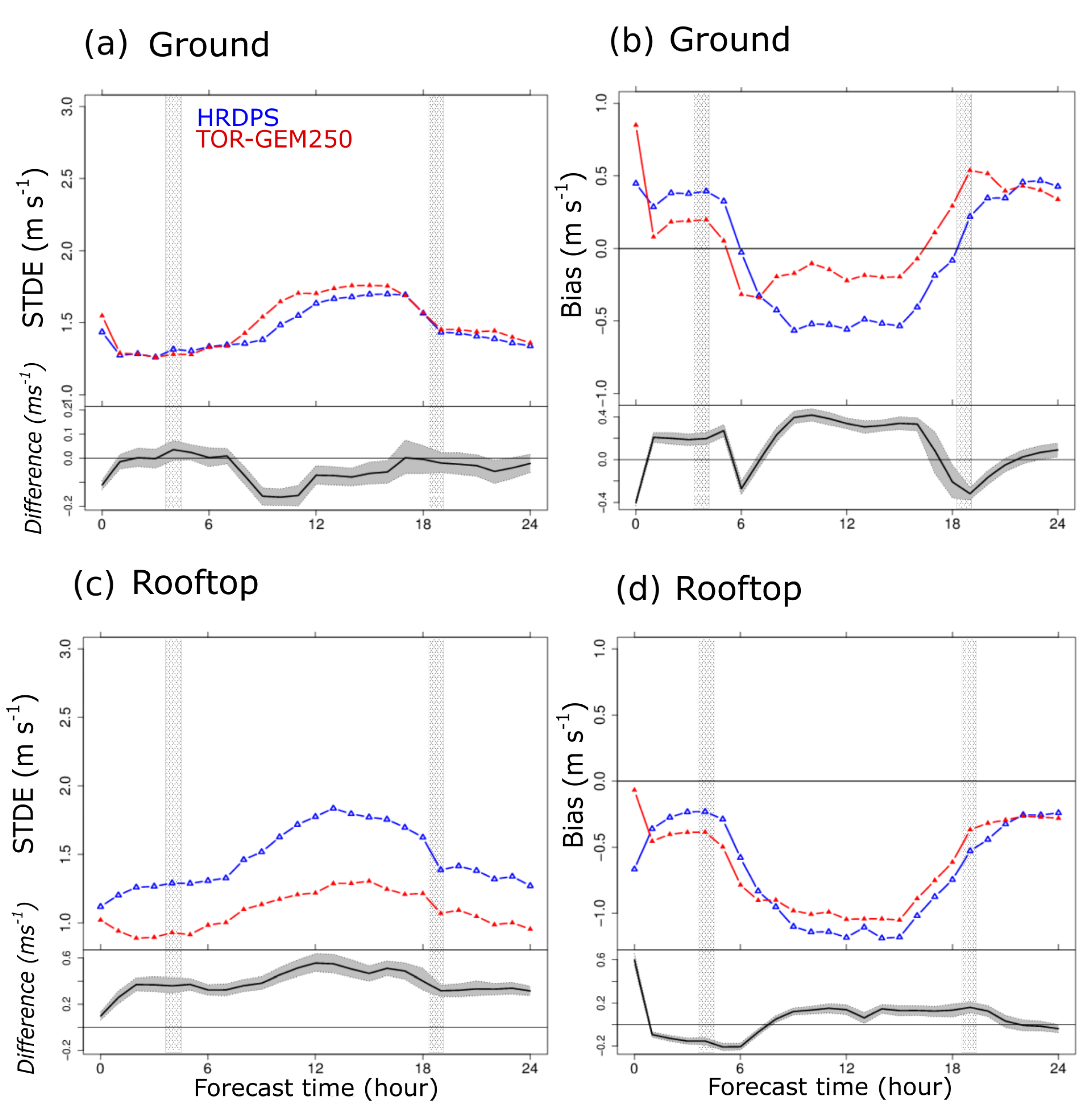
3.2.2. Wind Field
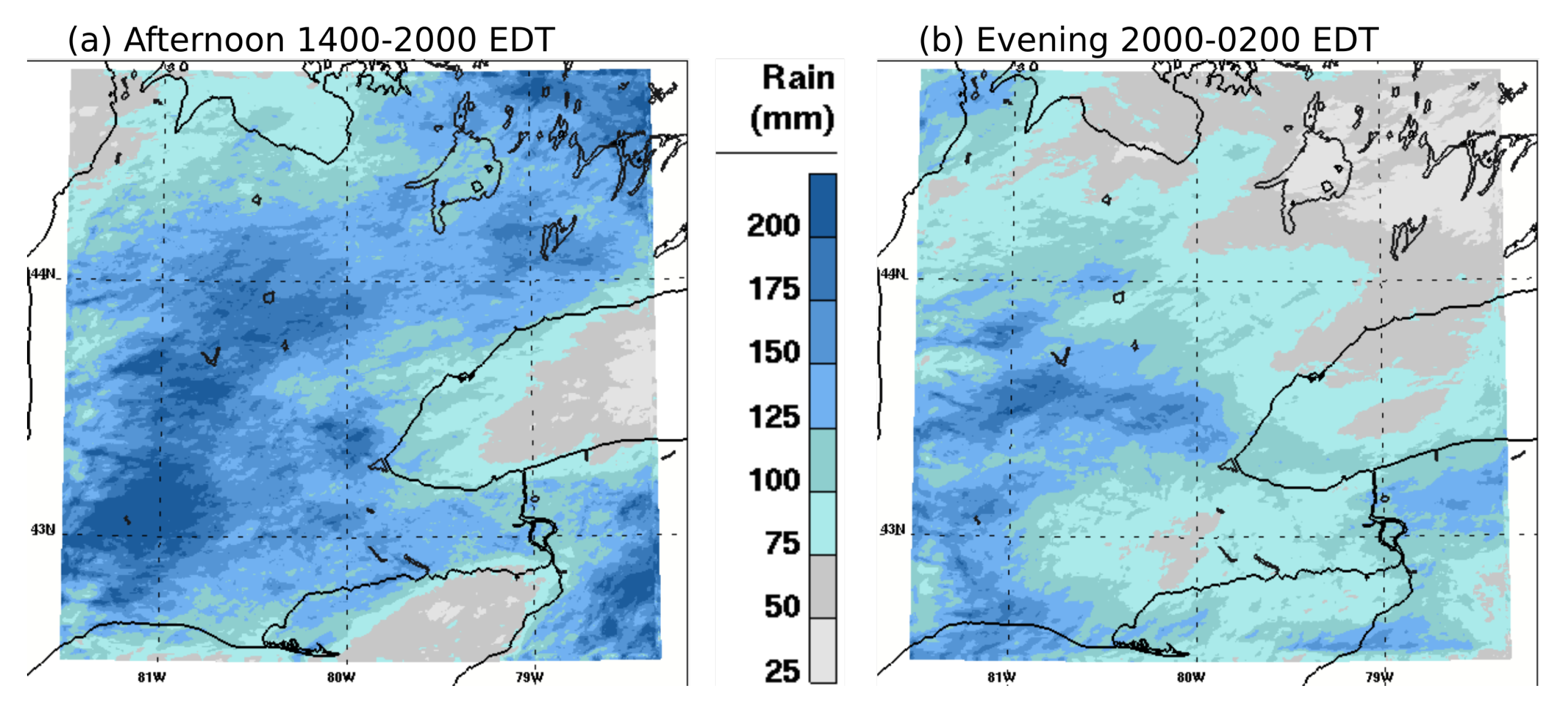
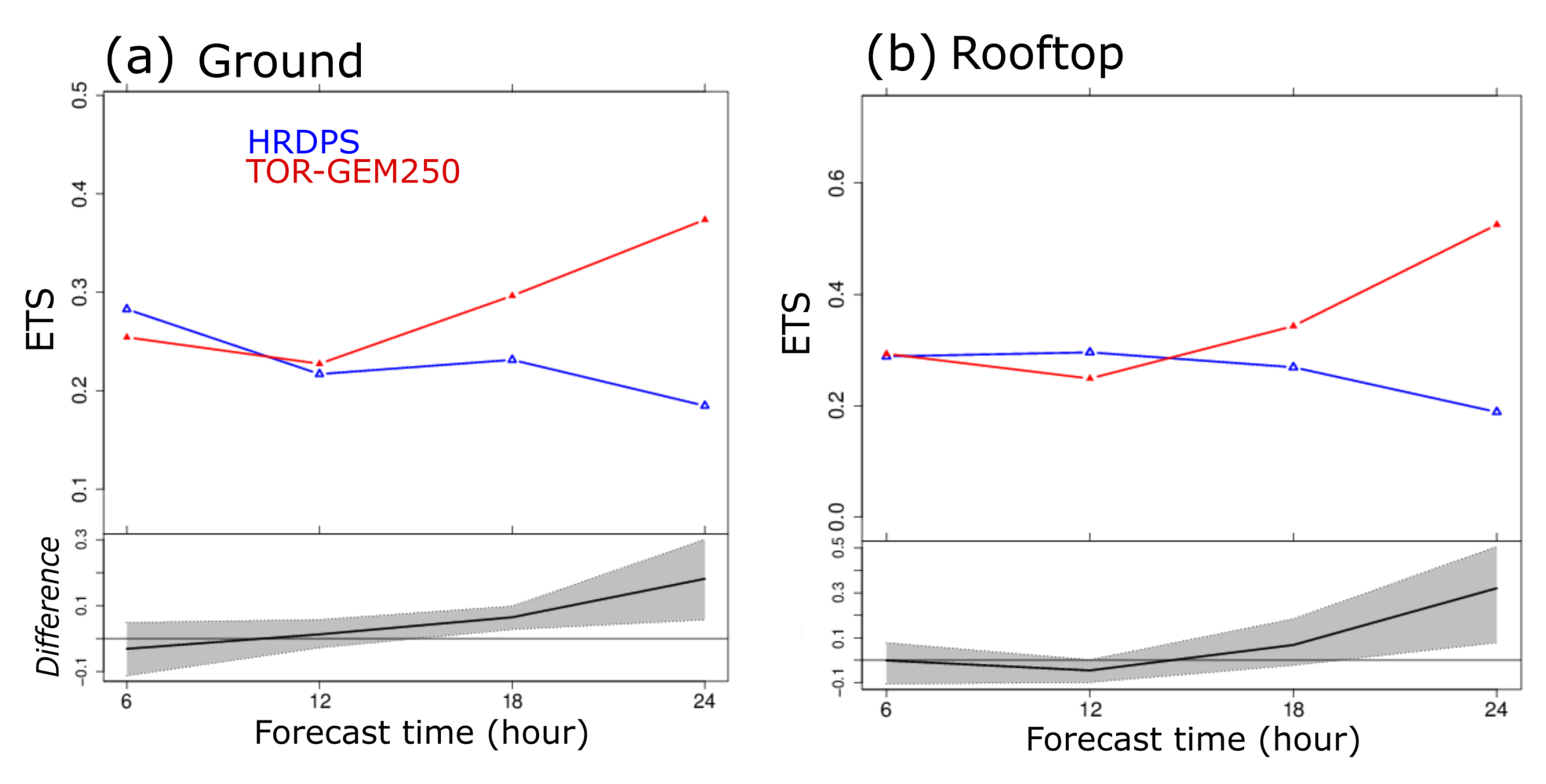
3.2.3. Precipitation
4. Summary and Conclusions
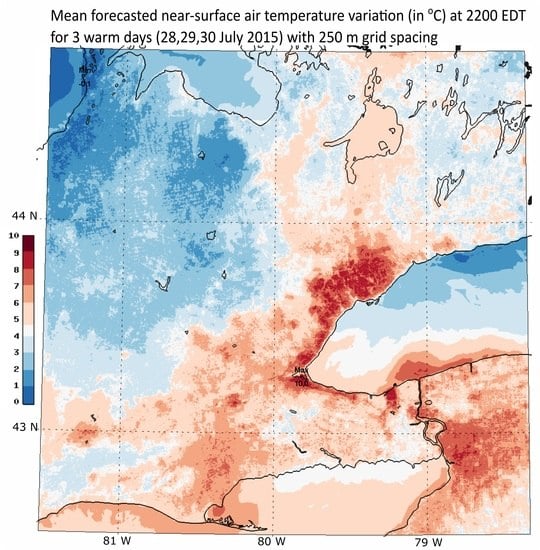
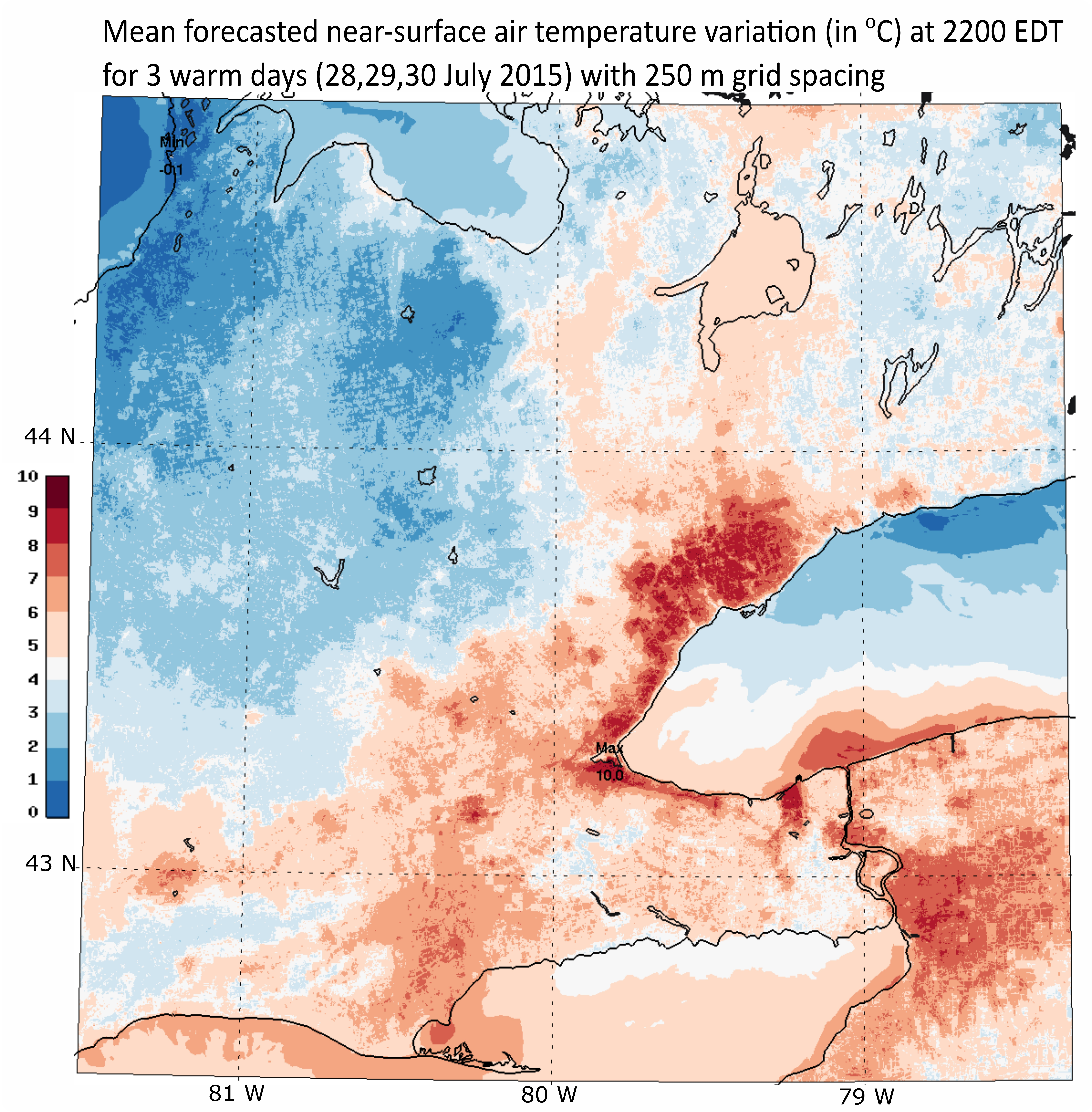
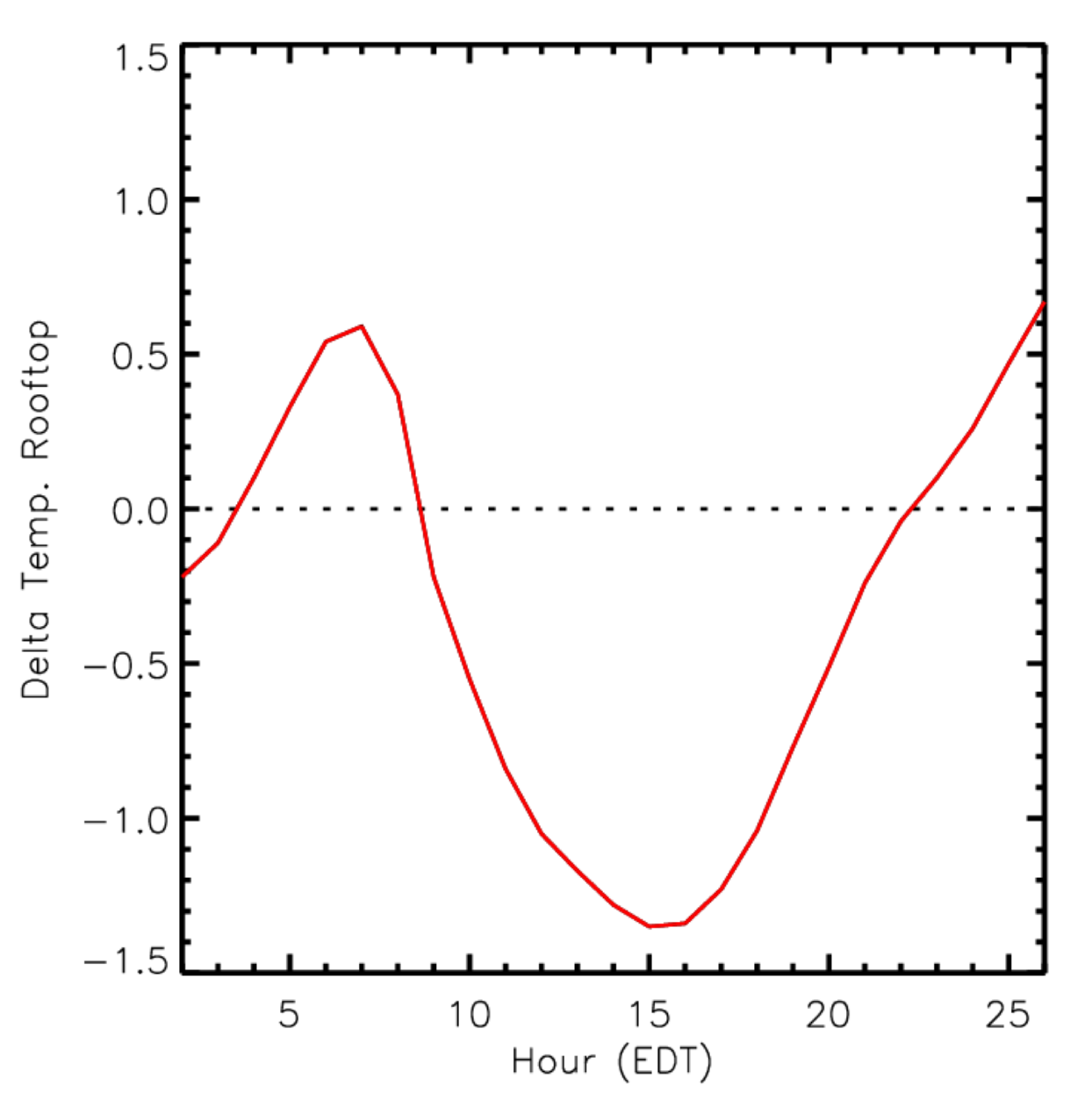
- The intra-urban scale micro-meteorology is predicted thanks to the representation of the urban fabric heterogeneity. Analysis of thermodynamic patterns over the summer season provides information on the characteristics of the GTA UHI which is important for both day, with a strong anisotropy, and night. On average for the season, CUHI is about 2 °C considering the rural surroundings. In details, it is about 1.8 °C during the night and 2.5 °C during the day as compared to the northern side of the city, and up to 8 °C during the day on the Lake Ontario side of the city. Contrasts can even reach 14 °C for some days in July when a low-deformation lake breeze penetrates inland. Urban-water surface contrasts are particularly large for this region which increase the impact of the city in the surface differential heating responsible for air advection and convergence zones. In the evening, heat stored in the urban canopy is restituted to the atmosphere through sensible heat flux in addition to surface radiative cooling;
- A further step towards an integrated system is reached in this study with the prescription of time-evolving Great-Lakes surface temperature based on realistic physical processes in the watershed. This additional factor in the representation of small-scale heterogeneity is influencing atmospheric circulations. Further development could include inline coupling of atmosphere and ocean processes at the same high-resolution (as is the case at ECCC for the global scale), or assimilation of in-situ buoys temperature. It is worth mentioning that surface temperature evolution over the Great Lakes have been successfully evaluated at a larger spatio-temporal scale [53], but more evaluation at the microscale would be needed as well. In particular there still can exists situation with some bias could be responsible for a lack of representation of the lake breeze system with potential impacts on the simulation of air pollutant dispersion in the GTA [9];
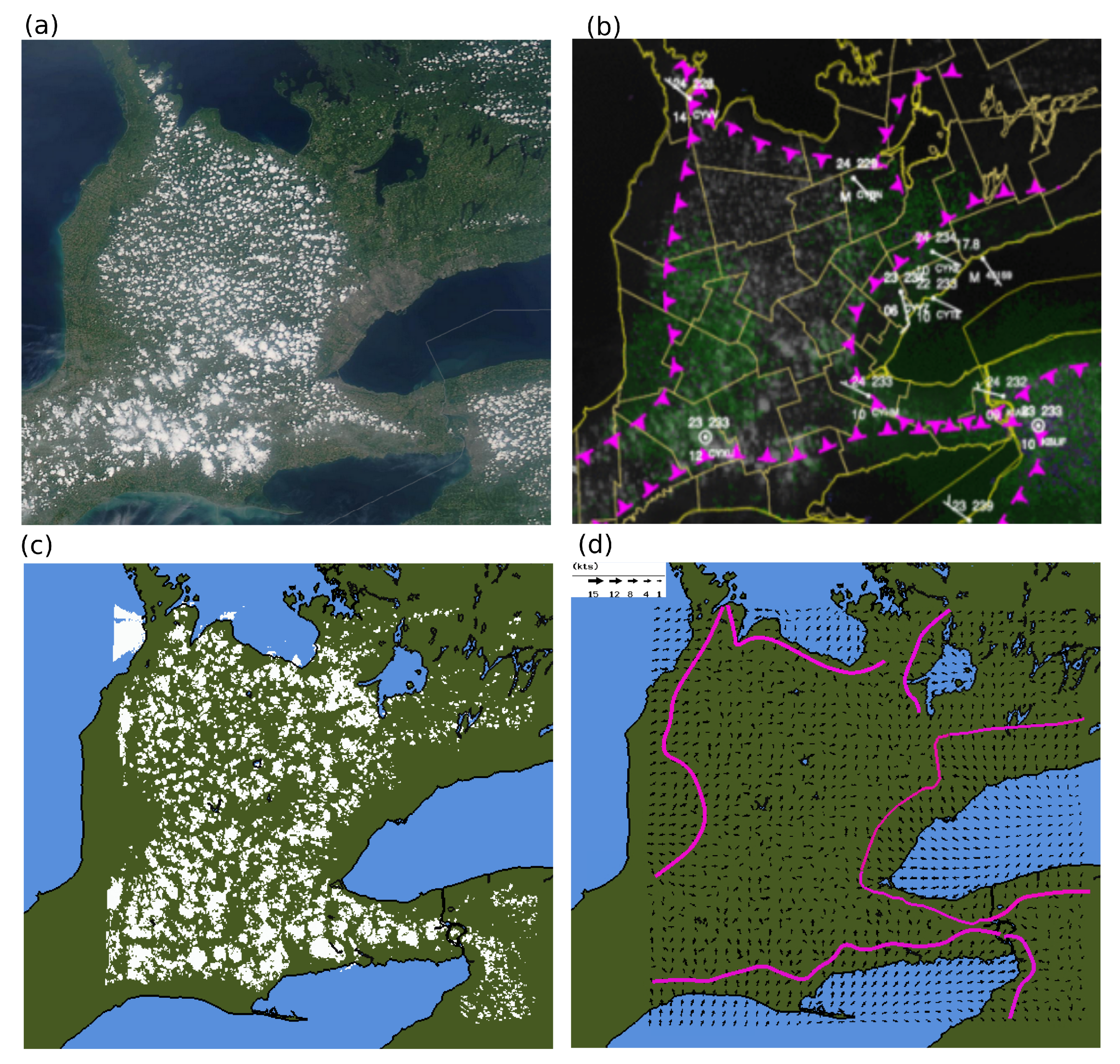
- Lake-breeze systems are important patterns in the GTA region and impact the local meteorology. Subjective comparison of TOR-GEM250 cloud patterns with satellite imagery on a day with lake breezes on multiple Great Lakes highlights the capacity of the system to provide realistic meteorological results which are not achieved by lower resolution systems. A complete objective analysis of lake breezes for the whole summertime season would be of interest;
- The real-time experimental system, TOR-GEM250, outperformed MSC’s HRDPS for all variables and in particular for the second part of the simulation, as evidenced by objective evaluation with 83 in-situ surface stations and mobile measurements. The system improves particularly the standard deviation errors through the day, which indicate that such a system would be valuable to represent small-scale variability in and around the city. This improvement reaches 0.3 °C for temperature and dew-point temperature and 0.5 m s for wind speed. A method to evaluate model output with measurements located both at the ground and at rooftop level has been suggested in this study. The authors advise to carefully consider the sensor height to evaluate the model output with the variable that is intended to represent the measured value. Additional evaluation of the wind field’s intra-urban variability will also be required. Further investigation would be needed to assess the representativeness of the wind measured very close to surface (at about 2 m) as is the case for the AMMOS mobile stations and for some of the fixed stations.It also appears that the system is not optimal in the first few hours of the simulation. In the near-future, emphasis on the more accurate initialization of TEB prognostic variables and soil moisture in urban areas will be deployed. Method currently under investigation include the recycling of variables, and/or the implementation of the urban areas in the CaLDAS assimilation system [68];
- Precipitation patterns include many more details in TOR-GEM250 than in lower resolution systems and in particular for the late afternoon and evening events. Improvement of objective evaluation at stations with ETS reaching 0.55 for the evening period in urban areas indicates that the refined system better represents the meteorology. The city of Toronto and its surroundings do not receive a lot of precipitation as compared to the rest of the domain. This kind of system could be used to develop a very high-resolution precipitation analysis that would provide important information for many sectors of activities. For example, recent development of an ECCC’s 2.5 km ensemble-based precipitation analysis system still fail to fully represent summertime convective precipitation [69];Finally, the ongoing replacement of the microphysics scheme and, more generally, the modernization of the physics in GEM [70] for ECCC’s NWP systems is also likely to improve the forecasting of clouds and precipitation properties. Enhancement in several aspects of the predictions can be expected with an adaptation of the turbulent subgrid scheme to the grey zone of turbulence [24,71].
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AAFC | Agriculture and Agri-Food Canada |
| AMMOS | Automated Mobile Meteorological Observation System |
| CaLDAS | Canadian Land Data Assimilation System |
| CDED-50 | Canadian Digital Elevation Data |
| CUHI | Canopy Urban Heat Island |
| ECCC | Environment and Climate Change Canda |
| EDT | Eastern Daylight Time |
| ETS | Equitable Threat Score |
| FAR | False Alarm Ratio |
| GEM | Global Environmental Multiscale model |
| GIS | Geographic Information System |
| GOES | Geostationary Operational Environmental Satellite |
| GTA | Greater Toronto Area |
| HRDPS | High-resolution Deterministic Prediction System |
| iCAST | interactive Convective Analysis and Storm Tracking |
| LCC2000 | Land Cover Circa 2000 |
| LULC | Land Use Land Cover |
| MODIS | Moderate Resolution Imaging Spectroradiometer |
| MSC | Meteorological Service of Canada |
| NLCD | National Land Cover Database |
| NRC | Natural Resources Canada |
| NTDB | National Topographic Data Base |
| NWP | Numerical Weather Prediction |
| OSM | OpenStreetMap |
| PanAm | Toronto 2015 Pan and Parapan American Games Science Showcase Research project |
| POD | Probability Of Detection |
| RDPS | Regional Deterministic Prediction System |
| RMSE | Root-Mean Square Error |
| SRTM | Shuttle Radar Topography Mission |
| STDE | Standard Deviation Error |
| SUHI | Surface Urban Heat Island |
| TEB | Town Energy Balance single layer canopy scheme |
| UHI | Urban Heat Island |
| UK | the United Kingdom |
| US | the Unites States |
| URBF | Urban Fraction |
| USDA | United States Department of Agriculture |
| UTC | Universal Time Coordinate |
| WCPS-GLS | Water Cycle Prediction System for Great Lakes |
| NEMO | Nucleus for European Modelling of the Ocean |
| CICE | Community Ice CodE |
Appendix A
| Observed | Total | |||
|---|---|---|---|---|
| Yes | No | |||
| Forecast | yes | |||
| no | ||||
| Total |
References
- Masson, V.; Lemonsu, A.; Hidalgo, J.; Voogt, J. Urban Climates and Climate Change. Annu. Rev. Environ. Resour. 2020, 45, 411–444. [Google Scholar] [CrossRef]
- Grimmond, S.; Bouchet, V.; Molina, L.T.; Baklanov, A.; Tan, J.; Schlünzen, K.H.; Mills, G.; Golding, B.; Masson, V.; Ren, C.; et al. Integrated urban hydrometeorological, climate and environmental services: Concept, methodology and key messages. Urban Clim. 2020, 33, 100623. [Google Scholar] [CrossRef] [PubMed]
- Baklanov, A.; Cárdenas, B.; Cheung Lee, T.; Leroyer, S.; Masson, V.; Molina, L.T.; Müller, T.; Ren, C.; Vogel, F.R.; Voogt, J.A. Integrated urban services: Experience from four cities on different continents. Urban Clim. 2020, 32, 100610. [Google Scholar] [CrossRef] [PubMed]
- Leroyer, S.; Bélair, S.; Mailhot, J.; Strachan, I.B. Microscale Numerical Prediction over Montreal with the Canadian External Urban Modeling System. J. Appl. Meteorol. Climatol. 2011, 50, 2410–2428. [Google Scholar] [CrossRef]
- Ronda, R.J.; Steeneveld, G.J.; Heusinkveld, B.G.; Attema, J.J.; Holtslag, A.A.M. Urban Finescale Forecasting Reveals Weather Conditions with Unprecedented Detail. Bull. Am. Meteorol. Soc. 2017, 98, 2675–2688. [Google Scholar] [CrossRef]
- Li, H.; Zhou, Y.; Wang, X.; Zhou, X.; Zhang, H.; Sodoudi, S. Quantifying urban heat island intensity and its physical mechanism using WRF/UCM. Sci. Total Environ. 2019, 650, 3110–3119. [Google Scholar] [CrossRef] [PubMed]
- Leroyer, S.; Bélair, S.; Husain, S.Z.; Mailhot, J. Subkilometer Numerical Weather Prediction in an Urban Coastal Area: A Case Study over the Vancouver Metropolitan Area. J. Appl. Meteorol. Climatol. 2014, 53, 1433–1453. [Google Scholar] [CrossRef]
- Bélair, S.; Leroyer, S.; Seino, N.; Spacek, L.; Souvanlasy, V.; Paquin-Ricard, D. Role and Impact of the Urban Environment in a Numerical Forecast of an Intense Summertime Precipitation Event over Tokyo. J. Meteorol. Soc. Jpn. Ser. II 2018, 96A, 77–94. [Google Scholar] [CrossRef] [Green Version]
- Stroud, C.A.; Ren, S.; Zhang, J.; Moran, M.D.; Akingunola, A.; Makar, P.A.; Munoz-Alpizar, R.; Leroyer, S.; Bélair, S.; Sills, D.; et al. Chemical analysis of surface-level ozone exceedances during the 2015 Pan American Games. Atmosphere 2020, 11, 572. [Google Scholar] [CrossRef]
- Mailhot, J.; Bélair, S.; Charron, M.; Doyle, C.; Joe, P.; Abrahamowicz, M.; Bernier, N.B.; Denis, B.; Erfani, A.; Frenette, R.; et al. Environment Canada’s Experimental Numerical Weather Prediction Systems for the Vancouver 2010 Winter Olympic and Paralympic Games. Bull. Am. Meteorol. Soc. 2010, 91, 1073–1086. [Google Scholar] [CrossRef] [Green Version]
- Bernier, N.B.; Bélair, S.; Bilodeau, B.; Tong, L. Near-Surface and Land Surface Forecast System of the Vancouver 2010 Winter Olympic and Paralympic Games. J. Hydrometeorol. 2011, 12, 508–530. [Google Scholar] [CrossRef]
- Joe, P.; Doyle, C.; Wallace, A.; Cober, S.G.; Scott, B.; Isaac, G.A.; Smith, T.; Mailhot, J.; Snyder, B.; Belair, S.; et al. Weather services, science advances, and the Vancouver 2010 Olympic and Paralympic Winter Games. Bull. Am. Meteorol. Soc. 2010, 91, 31–36. [Google Scholar] [CrossRef] [Green Version]
- Kiktev, D.; Joe, P.; Isaac, G.A.; Montani, A.; Frogner, I.L.; Nurmi, P.; Bica, B.; Milbrandt, J.; Tsyrulnikov, M.; Astakhova, E.; et al. FROST-2014: The Sochi winter Olympics international project. Bull. Am. Meteorol. Soc. 2017, 98, 1908–1929. [Google Scholar] [CrossRef]
- Golding, B.; Ballard, S.; Mylne, K.; Roberts, N.; Saulter, A.; Wilson, C.; Agnew, P.; Davis, L.; Trice, J.; Jones, C.; et al. Forecasting capabilities for the London 2012 Olympics. Bull. Am. Meteorol. Soc. 2014, 95, 883–896. [Google Scholar] [CrossRef]
- Joe, P.; Belair, S.; Bernier, N.; Bouchet, V.; Brook, J.; Brunet, D.; Burrows, W.; Charland, J.P.; Dehghan, A.; Driedger, N.; et al. The environment Canada pan and parapan American science showcase project. Bull. Am. Meteorol. Soc. 2018, 99, 921–953. [Google Scholar] [CrossRef]
- Hidalgo, J.; Masson, V.; Gimeno, L. Scaling the Daytime Urban Heat Island and Urban-Breeze Circulation. J. Appl. Meteorol. Climatol. 2010, 49, 889–901. [Google Scholar] [CrossRef] [Green Version]
- Lemonsu, A.; Masson, V. Simulation of a summer urban breeze over Paris. Bound.-Layer Meteorol. 2002, 104, 463–490. [Google Scholar] [CrossRef]
- Boutle, I.A.; Finnenkoetter, A.; Lock, A.P.; Wells, H. The London Model: Forecasting fog at 333 m resolution. Q. J. R. Meteorol. Soc. 2016, 142, 360–371. [Google Scholar] [CrossRef]
- Lean, H.W.; Barlow, J.F.; Halios, C.H. The impact of spin-up and resolution on the representation of a clear convective boundary layer over London in order 100 m grid-length versions of the Met Office Unified Model. Q. J. R. Meteorol. Soc. 2019, 145, 1674–1689. [Google Scholar] [CrossRef]
- Milbrandt, J.A.; Bélair, S.; Faucher, M.; Vallée, M.; Carrera, M.L.; Glazer, A. The Pan-Canadian high resolution (2.5 km) deterministic prediction system. Weather Forecast. 2016, 31, 1791–1816. [Google Scholar] [CrossRef]
- Côté, J.; Gravel, S.; Méthot, A.; Patoine, A.; Roch, M.; Staniforth, A. The operational CMC–MRB global environmental multiscale (GEM) model. Part I: Design considerations and formulation. Mon. Weather Rev. 1998, 126, 1373–1395. [Google Scholar] [CrossRef]
- Girard, C.; Plante, A.; Desgagné, M.; McTaggart-Cowan, R.; Côté, J.; Charron, M.; Gravel, S.; Lee, V.; Patoine, A.; Qaddouri, A.; et al. Staggered vertical discretization of the Canadian Environmental Multiscale (GEM) model using a coordinate of the log-hydrostatic-pressure type. Mon. Weather Rev. 2014, 142, 1183–1196. [Google Scholar] [CrossRef]
- Honnert, R.; Masson, V. What is the smallest physically acceptable scale for 1D turbulence schemes? Front. Earth Sci. 2014, 2, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Honnert, R.; Efstathiou, G.A.; Beare, R.J.; Ito, J.; Lock, A.; Neggers, R.; Plant, R.S.; Shin, H.H.; Tomassini, L.; Zhou, B. The atmospheric boundary layer and the “gray zone” of turbulence: A critical review. J. Geophys. Res. Atmos. 2020, 125, e2019JD030317. [Google Scholar] [CrossRef]
- Juliano, T.W.; Kosović, B.; Jiménez, P.A.; Eghdami, M.; Haupt, S.E.; Martilli, A. “Gray Zone” Simulations using a Three-Dimensional Planetary Boundary Layer Parameterization in the Weather Research and Forecasting Model. Mon. Weather Rev. 2021, 150, 1585–1619. [Google Scholar] [CrossRef]
- Giani, P.; Genton, M.G.; Crippa, P. Modeling the Convective Boundary Layer in the Terra Incognita: Evaluation of Different Strategies with Real-Case Simulations. Mon. Weather Rev. 2022, 150, 981–1001. [Google Scholar] [CrossRef]
- Cheng, Y.; Giometto, M.G.; Kauffmann, P.; Lin, L.; Cao, C.; Zupnick, C.; Li, H.; Li, Q.; Huang, Y.; Abernathey, R.; et al. Deep learning for subgrid-scale turbulence modeling in large-eddy simulations of the convective atmospheric boundary layer. J. Adv. Model. Earth Syst. 2022, 14, e2021MS002847. [Google Scholar] [CrossRef]
- Lemonsu, A.; Belair, S.; Mailhot, J. The new Canadian urban modelling system: Evaluation for two cases from the Joint Urban 2003 Oklahoma City Experiment. Bound.-Layer Meteorol. 2009, 133, 47–70. [Google Scholar] [CrossRef]
- Vionnet, V.; Bélair, S.; Girard, C.; Plante, A. Wintertime subkilometer numerical forecasts of near-surface variables in the Canadian Rocky Mountains. Mon. Weather Rev. 2015, 143, 666–686. [Google Scholar] [CrossRef]
- Leroyer, S.; Bélair, S.; Spacek, L.; Gultepe, I. Modelling of radiation-based thermal stress indicators for urban numerical weather prediction. Urban Clim. 2018, 25, 64–81. [Google Scholar] [CrossRef]
- Masson, V. A physically-based scheme for the urban energy budget in atmospheric models. Bound.-Layer Meteorol. 2000, 94, 357–397. [Google Scholar] [CrossRef]
- Kanda, M.; Kanega, M.; Kawai, T.; Moriwaki, R.; Sugawara, H. Roughness lengths for momentum and heat derived from outdoor urban scale models. J. Appl. Meteorol. Climatol. 2007, 46, 1067–1079. [Google Scholar] [CrossRef]
- Leroyer, S.; Mailhot, J.; Bélair, S.; Lemonsu, A.; Strachan, I.B. Modeling the Surface Energy Budget during the Thawing Period of the 2006 Montreal Urban Snow Experiment. J. Appl. Meteorol. Climatol. 2010, 49, 68–84. [Google Scholar] [CrossRef] [Green Version]
- Noilhan, J.; Planton, S. A simple parameterization of land surface processes for meteorological models. Mon. Weather Rev. 1989, 117, 536–549. [Google Scholar] [CrossRef]
- Bélair, S.; Brown, R.; Mailhot, J.; Bilodeau, B.; Crevier, L.P. Operational Implementation of the ISBA Land Surface Scheme in the Canadian Regional Weather Forecast Model. Part II: Cold Season Results. J. Hydrometeorol. 2003, 4, 371–386. [Google Scholar] [CrossRef]
- Pudykiewicz, J.; Benoit, R.; Mailhot, J. Inclusion and verification of a predictive cloud-water scheme in a regional numerical weather prediction model. Mon. Weather Rev. 1992, 120, 612–626. [Google Scholar] [CrossRef] [Green Version]
- Milbrandt, J.; Yau, M. A multimoment bulk microphysics parameterization. Part II: A proposed three-moment closure and scheme description. J. Atmos. Sci. 2005, 62, 3065–3081. [Google Scholar] [CrossRef]
- Benoit, R.; Côté, J.; Mailhot, J. Inclusion of a TKE Boundary Layer Parameterization in the Canadian Regional Finite-Element Model. Mon. Weather Rev. 1989, 117, 1726–1750. [Google Scholar] [CrossRef] [Green Version]
- Bélair, S.; Mailhot, J.; Girard, C.; Vaillancourt, P. Boundary Layer and Shallow Cumulus Clouds in a Medium-Range Forecast of a Large-Scale Weather System. Mon. Weather Rev. 2005, 133, 1938–1960. [Google Scholar] [CrossRef]
- Kain, J.S.; Fritsch, J.M. Convective parameterization for mesoscale models: The Kain-Fritsch scheme. In The Representation of Cumulus Convection in Numerical Models; Springer: Boston, MA, USA, 1993; pp. 165–170. [Google Scholar]
- Li, J.; Barker, H.W. A Radiation Algorithm with Correlated-k Distribution. Part I: Local Thermal Equilibrium. J. Atmos. Sci. 2005, 62, 286–309. [Google Scholar] [CrossRef]
- Husain, S.Z.; Bélair, S.; Leroyer, S. Influence of soil moisture on urban microclimate and surface-layer meteorology in Oklahoma City. J. Appl. Meteorol. Climatol. 2014, 53, 83–98. [Google Scholar] [CrossRef]
- Carrera, M.L.; Bélair, S.; Bilodeau, B. The Canadian land data assimilation system (CaLDAS): Description and synthetic evaluation study. J. Hydrometeorol. 2015, 16, 1293–1314. [Google Scholar] [CrossRef]
- Masson, V.; Grimmond, C.S.B.; Oke, T.R. Evaluation of the Town Energy Balance (TEB) scheme with direct measurements from dry districts in two cities. J. Appl. Meteorol. 2002, 41, 1011–1026. [Google Scholar]
- Ren, S.; Stroud, C.A.; Belair, S.; Leroyer, S.; Munoz-Alpizar, R.; Moran, M.D.; Zhang, J.; Akingunola, A.; Makar, P.A. Impact of urbanization on the predictions of urban meteorology and air pollutants over four major North American cities. Atmosphere 2020, 11, 969. [Google Scholar] [CrossRef]
- Sills, D.; Driedger, N.; Greaves, B.; Hung, E.; Paterson, R. iCAST: A prototype thunderstorm nowcasting system focused on optimization of the human-machine mix. In Proceedings of the Second World Weather Research Programme Symposium on Nowcasting and Very Short Range Forecasting; Environment Canada: Whistler, BC, Canada, 2009; Volume 2. [Google Scholar]
- Rochoux, M.C.; Bélair, S.; Abrahamowicz, M.; Pellerin, P. Subgrid-scale variability for thermodynamic variables in an offline land surface prediction system. J. Hydrometeorol. 2016, 17, 171–193. [Google Scholar] [CrossRef]
- Ching, J.; Mills, G.; Bechtel, B.; See, L.; Feddema, J.; Wang, X.; Ren, C.; Brousse, O.; Martilli, A.; Neophytou, M.; et al. WUDAPT: An Urban Weather, Climate, and Environmental Modeling Infrastructure for the Anthropocene. Bull. Am. Meteorol. Soc. 2018, 99, 1907–1924. [Google Scholar] [CrossRef] [Green Version]
- Leroux, A.; Gauthier, J.P.; Lemonsu, A.; Bélair, S.; Mailhot, J. Automated urban land use and land cover classification for mesoscale atmospheric modeling over Canadian cities. Geomatica 2009, 63, 13–24. [Google Scholar]
- Macdonald, R.; Griffiths, R.; Hall, D. An improved method for the estimation of surface roughness of obstacle arrays. Atmos. Environ. 1998, 32, 1857–1864. [Google Scholar] [CrossRef]
- Grimmond, C.; Oke, T.R. Aerodynamic properties of urban areas derived from analysis of surface form. J. Appl. Meteorol. Climatol. 1999, 38, 1262–1292. [Google Scholar] [CrossRef]
- Brasnett, B. The impact of satellite retrievals in a global sea-surface-temperature analysis. Q. J. R. Meteorol. Soc. 2008, 134, 1745–1760. [Google Scholar] [CrossRef]
- Dupont, F.; Chittibabu, P.; Fortin, V.; Rao, Y.R.; Lu, Y. Assessment of a NEMO-based hydrodynamic modelling system for the Great Lakes. Water Qual. Res. J. Can. 2012, 47, 198–214. [Google Scholar] [CrossRef]
- Durnford, D.; Fortin, V.; Smith, G.; Archambault, B.; Deacu, D.; Dupont, F.; Dyck, S.; Martinez, Y.; Klyszejko, E.; MacKay, M.; et al. Toward an operational water cycle prediction system for the Great Lakes and St. Lawrence River. Bull. Am. Meteorol. Soc. 2018, 99, 521–546. [Google Scholar] [CrossRef]
- Madec, G. NEMO Reference Manual, Ocean Dynamic Component: NEMO–OPA, Note du Pôle de Modélisation; Technical Report 27; Institut Pierre-Simon Laplace: Guyancourt, France, 2008; pp. 1288–1619. [Google Scholar]
- Hunke, E.C.; Lipscomb, W.H.; Turner, A.K.; Jeffery, N.; Elliott, S. Cice: The los alamos sea ice model documentation and software user’s manual version 4.1 la-cc-06-012. T-3 Fluid Dyn. Group Los Alamos Natl. Lab. 2010, 675, 500. [Google Scholar]
- Ebert, E.E. Fuzzy verification of high-resolution gridded forecasts: A review and proposed framework. Meteorol. Appl. A J. Forecast. Pract. Appl. Train. Tech. Model. 2008, 15, 51–64. [Google Scholar] [CrossRef]
- Dehghan, A.; Mariani, Z.; Leroyer, S.; Sills, D.; Bélair, S.; Joe, P. Evaluation of modeled lake breezes using an enhanced observational network in southern Ontario: Case studies. J. Appl. Meteorol. Climatol. 2018, 57, 1511–1534. [Google Scholar] [CrossRef]
- Brunet, D.; Sills, D.; Casati, B. A spatio-temporal user-centric distance for forecast verification. Meteorol. Z. 2018, 441–453. [Google Scholar] [CrossRef]
- Huang, A.; Rao, Y.R.; Lu, Y.; Zhao, J. Hydrodynamic modeling of Lake Ontario: An intercomparison of three models. J. Geophys. Res. Ocean. 2010, 115. [Google Scholar] [CrossRef]
- Sills, D.; Brook, J.; Levy, I.; Makar, P.; Zhang, J.; Taylor, P. Lake breezes in the southern Great Lakes region and their influence during BAQS-Met 2007. Atmos. Chem. Phys. 2011, 11, 7955–7973. [Google Scholar] [CrossRef] [Green Version]
- Jandaghian, Z.; Berardi, U. Comparing urban canopy models for microclimate simulations in Weather Research and Forecasting Models. Sustain. Cities Soc. 2020, 55, 102025. [Google Scholar] [CrossRef]
- Sharma, A.; Fernando, H.J.; Hamlet, A.F.; Hellmann, J.J.; Barlage, M.; Chen, F. Urban meteorological modeling using WRF: A sensitivity study. Int. J. Climatol. 2017, 37, 1885–1900. [Google Scholar] [CrossRef]
- King, P.W.; Leduc, M.J.; Sills, D.M.; Donaldson, N.R.; Hudak, D.R.; Joe, P.; Murphy, B.P. Lake breezes in southern Ontario and their relation to tornado climatology. Weather Forecast. 2003, 18, 795–807. [Google Scholar] [CrossRef]
- Alexander, L.S.; Sills, D.M.L.; Taylor, P.A. Initiation of Convective Storms at Low-Level Mesoscale Boundaries in Southwestern Ontario. Weather Forecast. 2018, 33, 583–598. [Google Scholar] [CrossRef]
- Wang, C.C.; Kirshbaum, D.J.; Sills, D.M. Convection initiation aided by lake-breeze convergence over the Niagara Peninsula. Mon. Weather Rev. 2019, 147, 3955–3979. [Google Scholar] [CrossRef]
- Lespinas, F.; Fortin, V.; Roy, G.; Rasmussen, P.; Stadnyk, T. Performance Evaluation of the Canadian Precipitation Analysis (CaPA). J. Hydrometeorol. 2015, 16, 2045–2064. [Google Scholar] [CrossRef]
- Caron, J.F.; Milewski, T.; Buehner, M.; Fillion, L.; Reszka, M.; Macpherson, S.; St-James, J. Implementation of deterministic weather forecasting systems based on ensemble–variational data assimilation at Environment Canada. Part II: The regional system. Mon. Weather Rev. 2015, 143, 2560–2580. [Google Scholar] [CrossRef]
- Khedhaouiria, D.; Bélair, S.; Fortin, V.; Roy, G.; Lespinas, F. High-Resolution (2.5 km) Ensemble Precipitation Analysis across Canada. J. Hydrometeorol. 2020, 21, 2023–2039. [Google Scholar] [CrossRef]
- McTaggart-Cowan, R.; Vaillancourt, P.; Zadra, A.; Chamberland, S.; Charron, M.; Corvec, S.; Milbrandt, J.; Paquin-Ricard, D.; Patoine, A.; Roch, M.; et al. Modernization of atmospheric physics parameterization in Canadian NWP. J. Adv. Model. Earth Syst. 2019, 11, 3593–3635. [Google Scholar] [CrossRef] [Green Version]
- Stein, T.H.M.; Hogan, R.J.; Clark, P.A.; Halliwell, C.E.; Hanley, K.E.; Lean, H.W.; Nicol, J.C.; Plant, R.S. The DYMECS Project: A Statistical Approach for the Evaluation of Convective Storms in High-Resolution NWP Models. Bull. Am. Meteorol. Soc. 2015, 96, 939–951. [Google Scholar] [CrossRef] [Green Version]
















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leroyer, S.; Bélair, S.; Souvanlasy, V.; Vallée, M.; Pellerin, S.; Sills, D. Summertime Assessment of an Urban-Scale Numerical Weather Prediction System for Toronto. Atmosphere 2022, 13, 1030. https://0-doi-org.brum.beds.ac.uk/10.3390/atmos13071030
Leroyer S, Bélair S, Souvanlasy V, Vallée M, Pellerin S, Sills D. Summertime Assessment of an Urban-Scale Numerical Weather Prediction System for Toronto. Atmosphere. 2022; 13(7):1030. https://0-doi-org.brum.beds.ac.uk/10.3390/atmos13071030
Chicago/Turabian StyleLeroyer, Sylvie, Stéphane Bélair, Vanh Souvanlasy, Marcel Vallée, Simon Pellerin, and David Sills. 2022. "Summertime Assessment of an Urban-Scale Numerical Weather Prediction System for Toronto" Atmosphere 13, no. 7: 1030. https://0-doi-org.brum.beds.ac.uk/10.3390/atmos13071030