
Interval Observers for Discrete-Time Linear Systems with Uncertainties
 , ,
, ,  ,
,  and
and 
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Main Models
3. The Reduced Order Model Design
4. Interval Observer Design
5. Robust Solution
6. Interval Estimation of the Vector
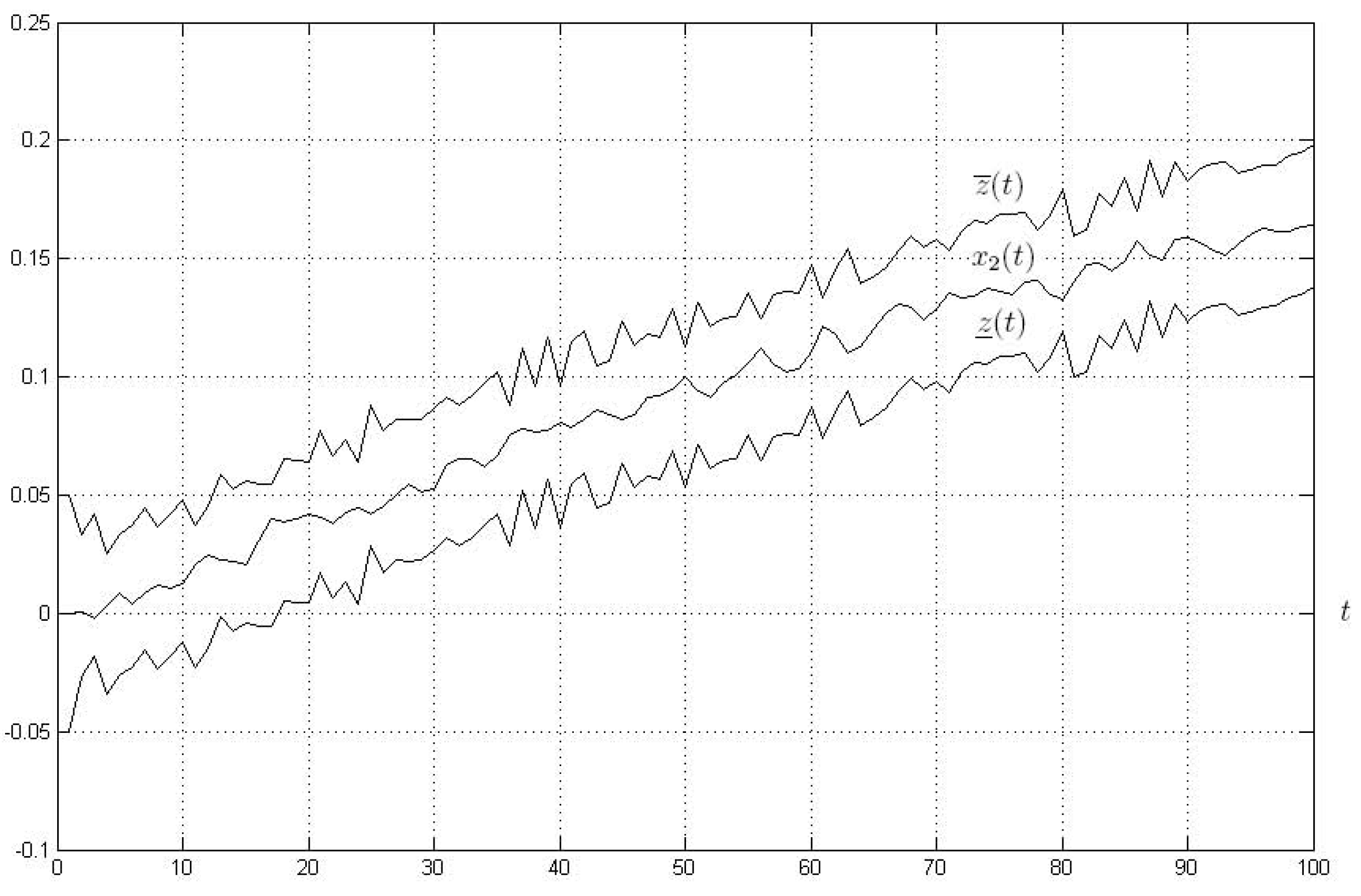
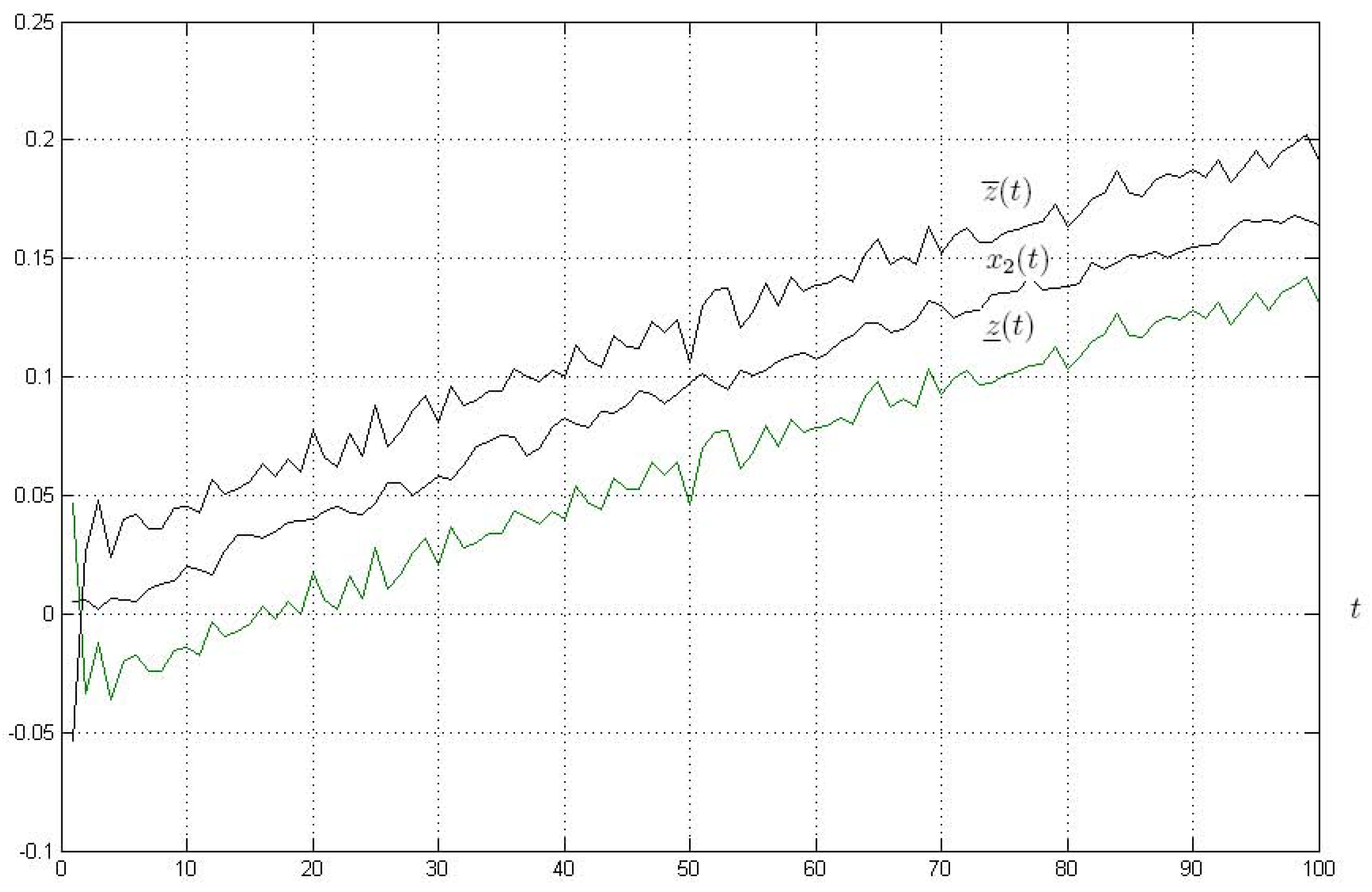
7. Example
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviation
| ICF & identification canonical form |
References
- Edwards, C.; Spurgeon, S.; Patton, R. Sliding mode observers for fault detection and isolation. Automatica 2000, 36, 541–553. [Google Scholar] [CrossRef]
- Fridman, L.; Levant, A.; Davila, J. Observation of linear systems with unknown inputs via high-order sliding-modes. Int. J. Syst. Sci. 2007, 38, 773–791. [Google Scholar] [CrossRef]
- Zhirabok, A.; Zuev, A.; Seriyenko, O.; Shumsky, A. Fault identificaition in nonlinear dynamic systems and their sensors based on sliding mode observers. Autom. Remote Control 2022, 83, 214–236. [Google Scholar] [CrossRef]
- Chebotarev, S.; Efimov, D.; Raissi, T.; Zolghadri, A. Interval observers for continous-time LPV systems with L1/L2 performance. Automatica 2015, 58, 82–89. [Google Scholar] [CrossRef]
- Degue, K.; Efimov, D.; Richard, J. Interval observers for linear impulsive systems. IFAC-PapersOnLine 2016, 49-18, 867–872. [Google Scholar] [CrossRef]
- Dinh, T.; Mazenc, F.; Niculescu, S. Interval observer composed of observers for nonlinear systems. In Proceedings of the 2014 European Control Conference (ECC), Strasbourg, France, 24–27 June 2014; pp. 660–665. [Google Scholar]
- Kolesov, N.; Gruzlikov, A.; Lukoyanov, E. Using fuzzy interacting observers for fault diagnosis in systems with parametric uncertainty. In Proceedings of the XII-th International Symposium Intelligent Systems (INTELS’16), Moscow, Russia, 5–7 October 2016; pp. 499–504. [Google Scholar]
- Mazenc, F.; Bernard, O. Interval observers for linear time-invariant systems with disturbances. Automatica 2011, 47, 140–147. [Google Scholar] [CrossRef] [Green Version]
- Raissi, T.; Efimov, D.; Zolghadri, A. Interval state estimation for a class of nonlinear systems. IEEE Trans. Autom. Control 2012, 57, 260–265. [Google Scholar] [CrossRef]
- Zheng, G.; Efimov, D.; Perruquetti, W. Interval state estimation for uncertain nonlinear systems. In Proceedings of the IFAC Nolcos 2013, Toulouse, France, 4–6 September 2013. [Google Scholar]
- Zhirabok, A.; Zuev, A.; Kim Chung, I. A Method to design interval observers for linear time-invariant systems. Comput. Syst. Sci. Int. 2022, 61, 485–495. [Google Scholar] [CrossRef]
- Efimov, D.; Perruquetti, W.; Raissi, T.; Zolghadri, A. Interval observers for time-varying discrete-time systems. IEEE Trans. Autom. Control 2013, 58, 3218–3224. [Google Scholar]
- Mazenc, F.; Dinh, T.; Niculescu, S. Interval observers for discrete-time systems. Inter. J. Robust Nonlinear Control 2014, 24, 2867–2890. [Google Scholar] [CrossRef] [Green Version]
- Efimov, D.; Polyakov, A.; Richard, J. Interval observer design for estimation and control of time-delay descriptor systems. Eur. J. Control 2015, 23, 26–35. [Google Scholar] [CrossRef]
- Efimov, D.; Raissi, T. Design of interval state observers for uncertain dynamical systems. Autom. Remote Control 2015, 77, 191–225. [Google Scholar] [CrossRef]
- Marouani, G.; Dinh, T.; Raissi, T.; Wang, X.; Messaoud, H. Unknown input interval observers for discrete-time linear switched systems. European J. Control 2021, 59, 165–174. [Google Scholar] [CrossRef]
- Zammali, C.; Gorp, J.; Wang, Z.; Raissi, T. Sensor fault detection for switched systems using interval observer with L∞ performance. Eur. J. Control 2020, 57, 147–156. [Google Scholar] [CrossRef]
- Alives, J.; Moreno, J.; Davila, J.; Becerra, G.; Flores, F.; Chavez, C.; Marques, C. Stability radii-based interval observers for discrete-time nonlinear systems. IEEE Access 2022, 10, 3216–3227. [Google Scholar]
- Blesa, J.; Rotondo, D.; Puig, V. FDI and FTC of wind turbines using the interval observer approach and virtual actuators/sensors. Control Eng. Pract. 2014, 24, 138–155. [Google Scholar] [CrossRef] [Green Version]
- Rotondo, D.; Fernandez-Canti, R.; Tornil-Sin, S. Robust fault diagnosis of proton exchange membrane fuel cells using a Takagi-Sugeno interval observer approach. Int. J. Hydrogen Energy 2016, 41, 2875–2886. [Google Scholar] [CrossRef] [Green Version]
- Zhang, K.; Jiang, B.; Yan, X.; Edwards, C. Interval sliding mode based fault accommodation for non-minimal phase LPV systems with online control application. Intern. J. Control 2019. [Google Scholar] [CrossRef]
- Khan, A.; Xie, W.; Zhang, B.; Liu, L. Design and applications of interval observers for uncertain dynamical systems. IET Circuits Devices Syst. 2020, 14, 721–740. [Google Scholar] [CrossRef]
- Khan, A.; Xie, W.; Zhang, B.; Liu, L. A survey of interval observers design methods and implementation for uncertain systems. J. Frankl. Inst. 2021, 358, 3077–3126. [Google Scholar] [CrossRef]
- Gu, D.; Liu, L.; Duan, G. Functional interval observer for the linear systems with disturbances. IET Control Theory Appl. 2018, 12, 2562–2568. [Google Scholar] [CrossRef]
- Haochi, C.; Jun, H.; Xudong, Z.; Xiang, M.; Ning, X. Functional interval observer for discrete-time systems with disturbances. Appl. Math. Comput. 2020, 383, 125352. [Google Scholar]
- Liu, L.; Xie, W.; Khan, A.; Zhang, L. Finite-time functional interval observer for linear systems with uncertainties. IET Control Theory Appl. 2020, 14, 2868–2878. [Google Scholar] [CrossRef]
- Meyer, L. Robust functional interval observer for multivariable linear systems. J. Dyn. Syst. Meas. Control 2019, 141, 094502. [Google Scholar] [CrossRef]
- Zhirabok, A.; Shumsky, A.; Solyanik, S.; Suvorov, A. Fault detection in nonlinear systems via linear methods. Int. J. Appl. Math. Comput. Sci. 2017, 27, 261–272. [Google Scholar] [CrossRef] [Green Version]
- Zhirabok, A. Disturbance decoupling problem: Logic-dynamic approach-based solution. Symmetry 2019, 11, 555. [Google Scholar] [CrossRef] [Green Version]
- Zhirabok, A. The problem of invariance in nonlinear discrete-time dynamic systems. Symmetry 2020, 12, 1241. [Google Scholar] [CrossRef]
- Low, X.; Willsky, A.; Verghese, G. Optimally robust redundancy relations for failure detection in uncertain systems. Automatica 1996, 22, 333–344. [Google Scholar]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sergiyenko, O.; Zhirabok, A.; Ibraheem, I.K.; Zuev, A.; Filaretov, V.; Azar, A.T.; Hameed, I.A. Interval Observers for Discrete-Time Linear Systems with Uncertainties. Symmetry 2022, 14, 2131. https://0-doi-org.brum.beds.ac.uk/10.3390/sym14102131
Sergiyenko O, Zhirabok A, Ibraheem IK, Zuev A, Filaretov V, Azar AT, Hameed IA. Interval Observers for Discrete-Time Linear Systems with Uncertainties. Symmetry. 2022; 14(10):2131. https://0-doi-org.brum.beds.ac.uk/10.3390/sym14102131
Chicago/Turabian StyleSergiyenko, Oleg, Alexey Zhirabok, Ibraheem Kasim Ibraheem, Alexander Zuev, Vladimir Filaretov, Ahmad Taher Azar, and Ibrahim A. Hameed. 2022. "Interval Observers for Discrete-Time Linear Systems with Uncertainties" Symmetry 14, no. 10: 2131. https://0-doi-org.brum.beds.ac.uk/10.3390/sym14102131