
A License Plate Recognition System with Robustness against Adverse Environmental Conditions Using Hopfield’s Neural Network


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
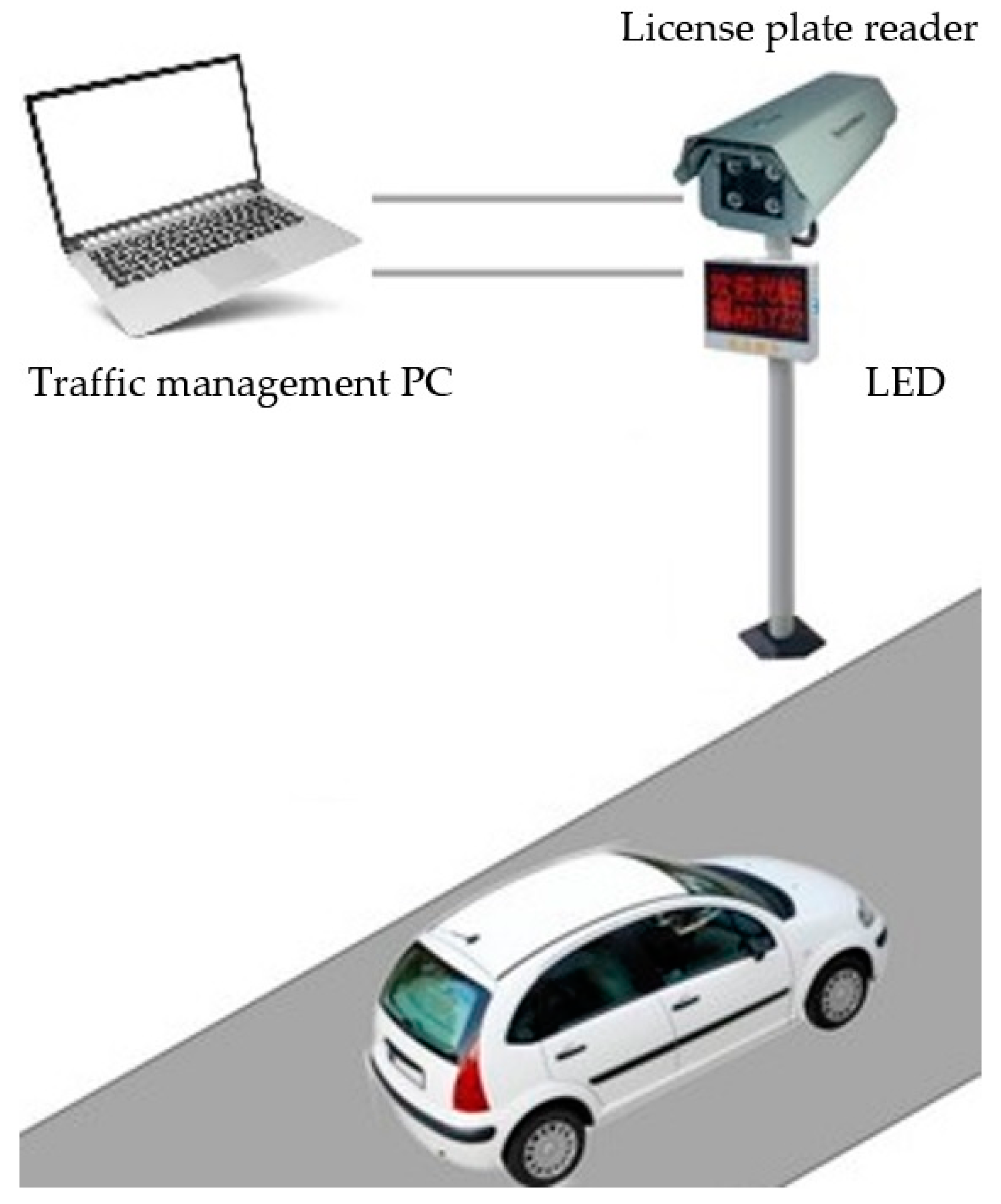
:1. Introduction
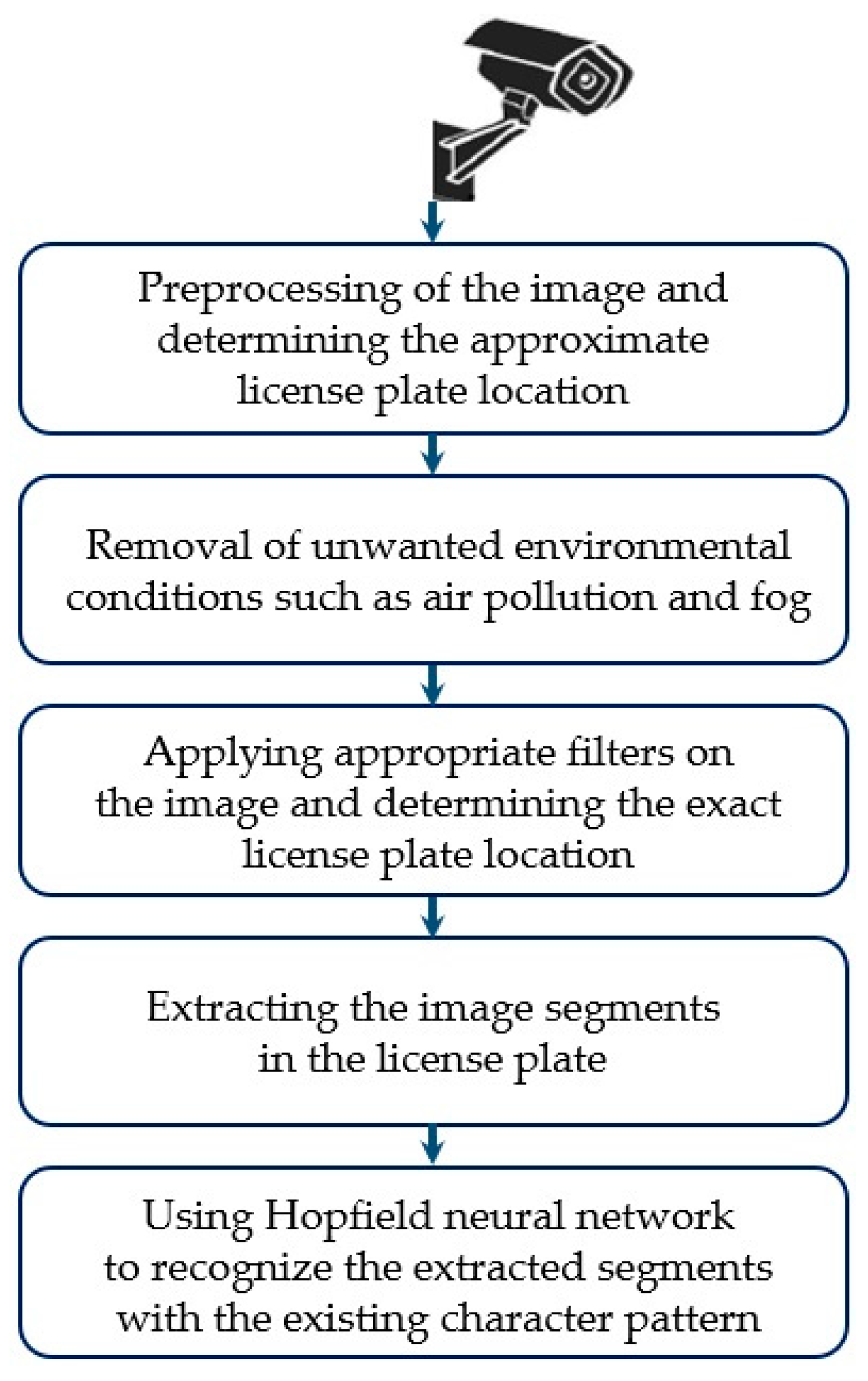
2. Methodology and Simulation Results
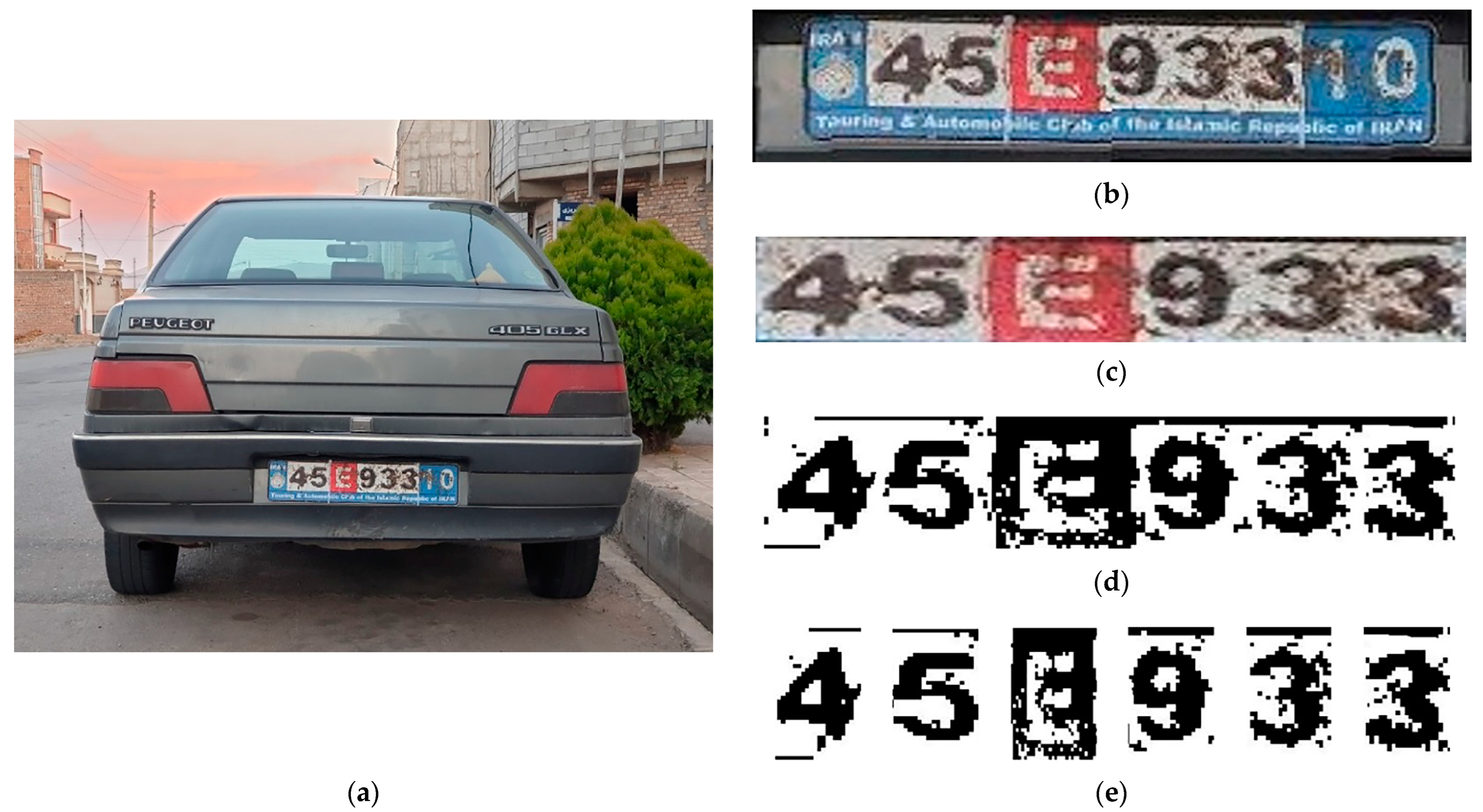
2.1. Preprocessing of the Image
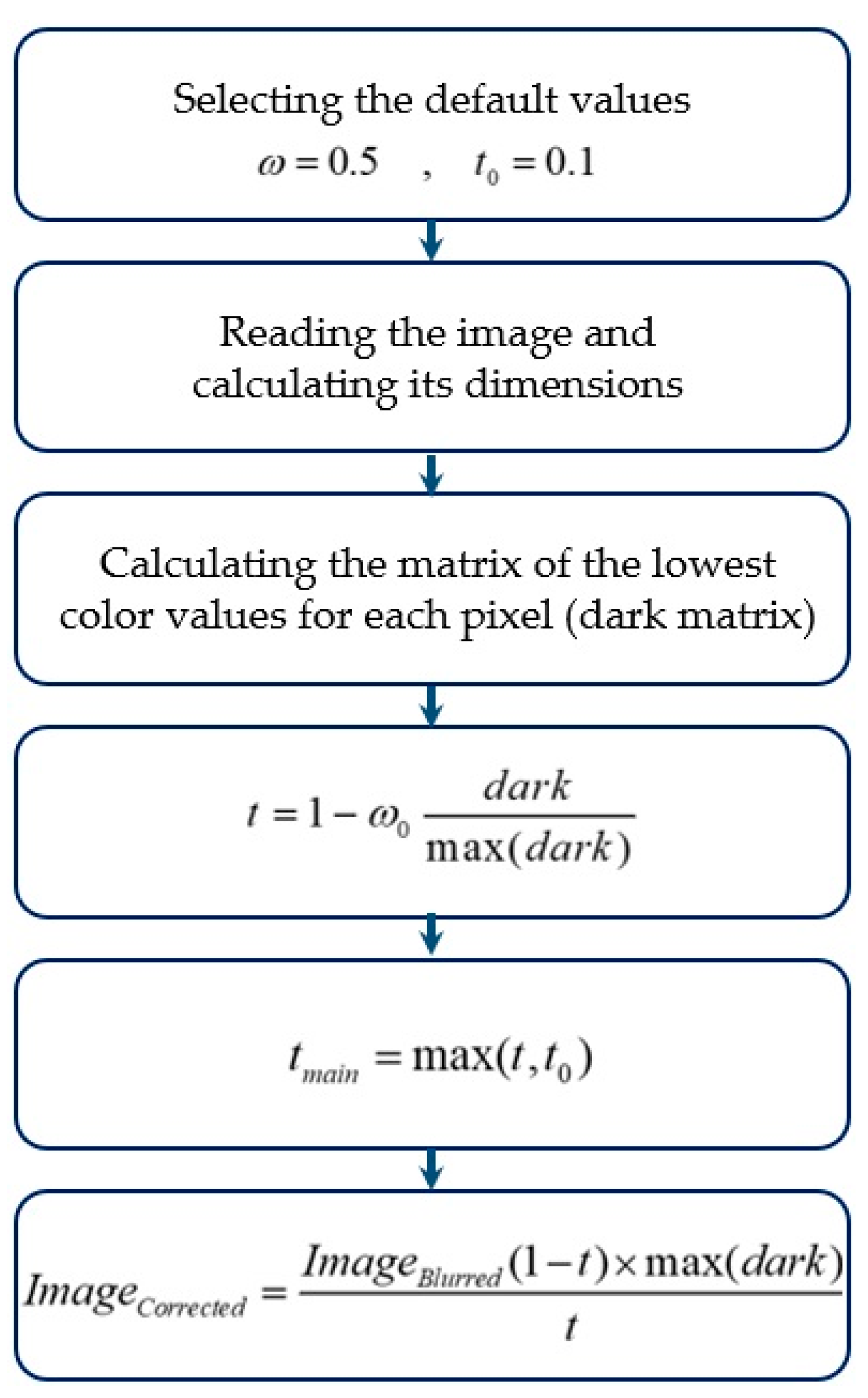
2.2. Elimination of Adverse Environmental Effects
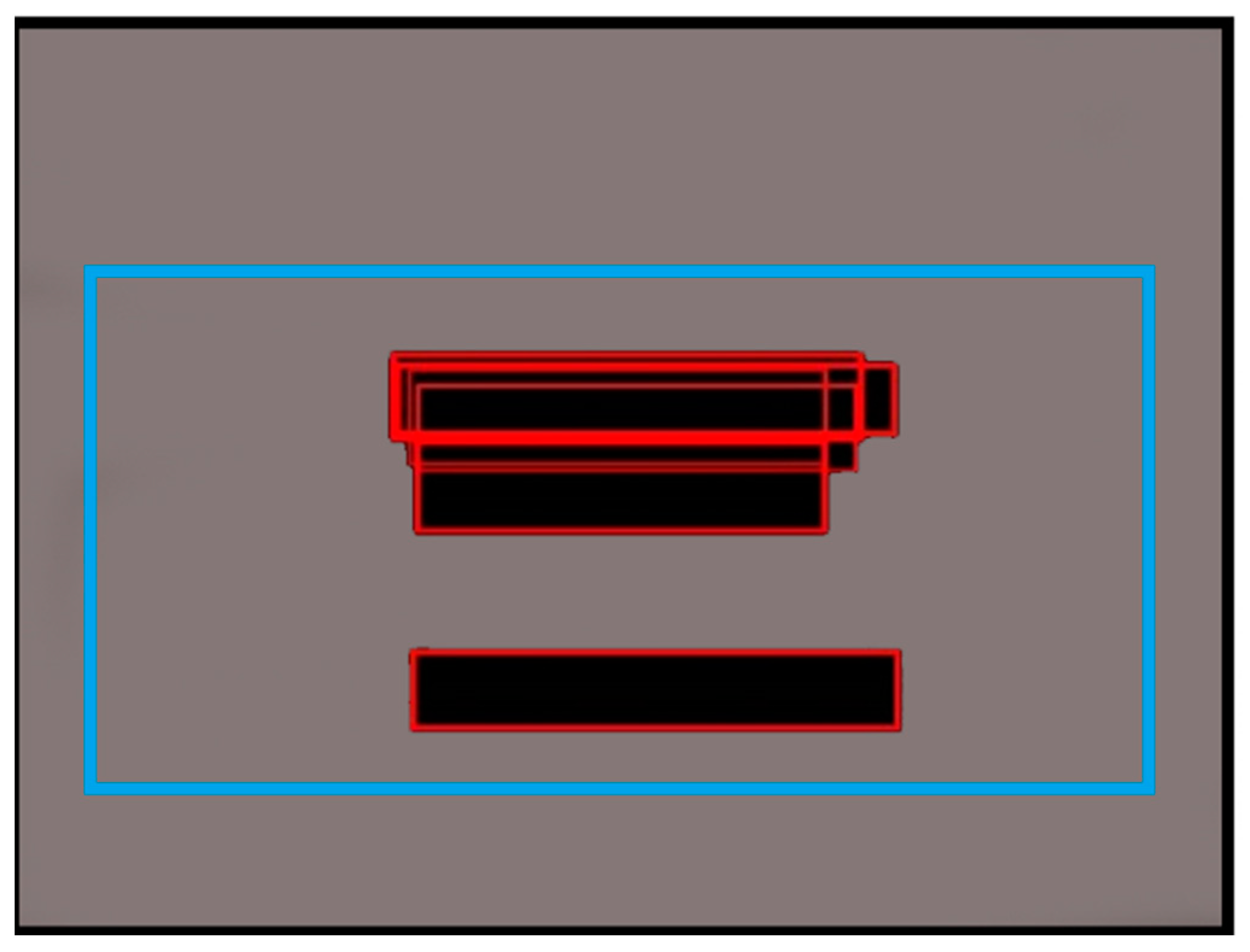
2.3. Determining the Exact Location of the License Plate
2.4. Determining the Segments inside the Plate
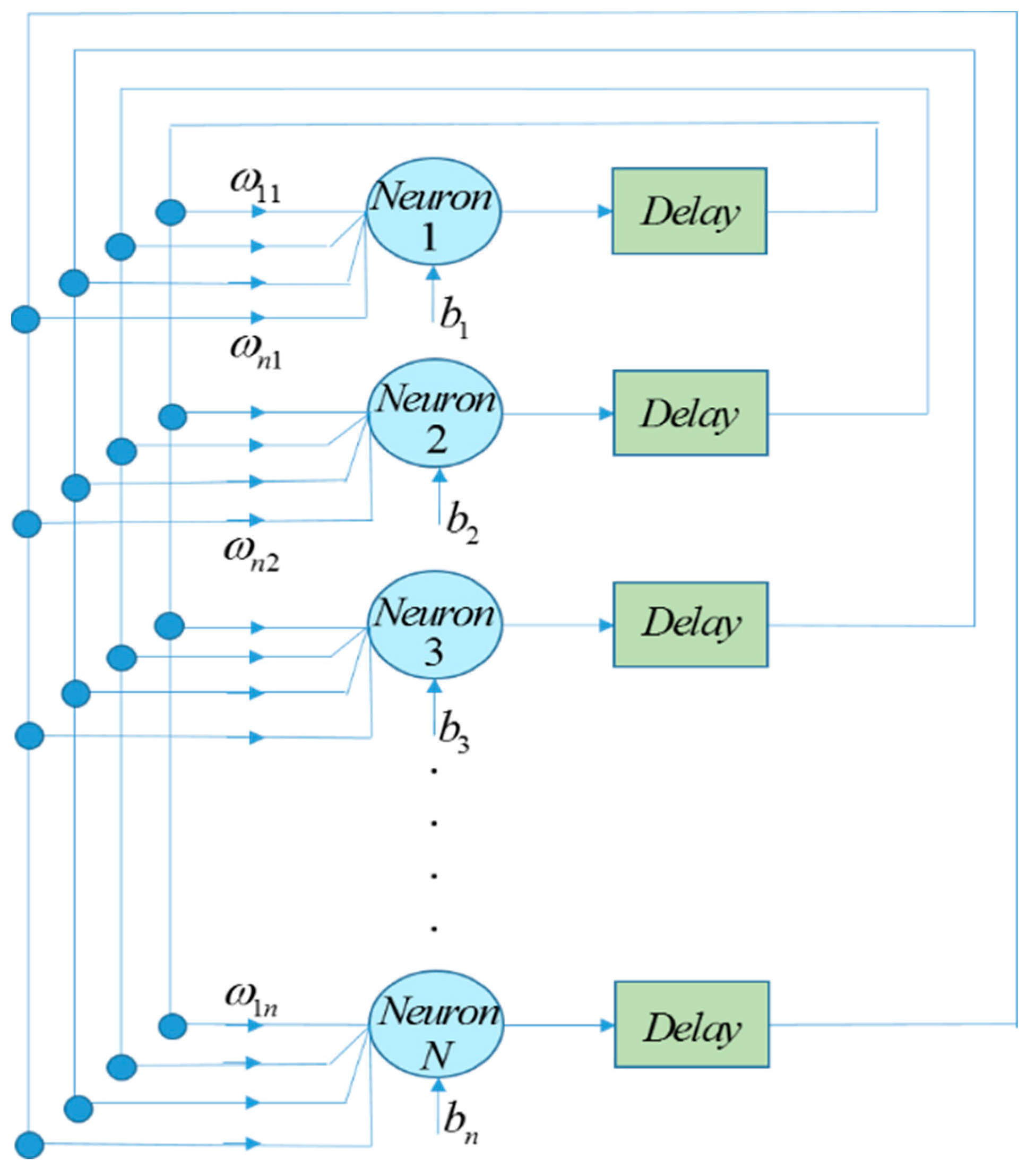
2.5. Recognizing the Segments Using Hopfield’s Neural Network
3. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tsakanikas, V.; Dagiuklas, T. Video surveillance systems-current status and future trends. Comput. Electr. Eng. 2018, 70, 736–753. [Google Scholar] [CrossRef]
- Sharma, S.K.; Phan, H.; Lee, J. An application study on road surface monitoring using DTW based image processing and ultrasonic sensors. Appl. Sci. 2020, 10, 4490. [Google Scholar] [CrossRef]
- Wang, S.-Z.; Lee, H.-J. Detection and recognition of license plate characters with different appearances. IEEE Trans. Intell. Transp. Syst. 2003, 2, 979–984. [Google Scholar]
- Radha, R.; Sumathi, C.P. A novel approach to extract text from license plate of vehicle. Signal Process. Image Commun. 2012, 3, 181–192. [Google Scholar] [CrossRef]
- Kuo, C.Y.; Lu, Y.R.; Yang, S.M. On the image sensor processing for lane detection and control in vehicle lane keeping systems. Sensors 2019, 19, 1665. [Google Scholar] [CrossRef]
- Zheng, K.; Wei, M.; Sun, G.; Anas, B.; Li, Y. Using vehicle synthesis generative adversarial networks to improve vehicle detection in remote sensing images. ISPRS Int. J. Geo-Inf. 2019, 8, 390. [Google Scholar] [CrossRef]
- Sulehria, H.K.; Zhang, Y.; Irfan, D.; Sulehria, A.K. Vehicle number plate recognition using mathematical morphology and neural networks. WSEAS Trans. Comput. 2008, 7, 781–790. [Google Scholar]
- Aggarwal, A.; Rani, A.; Kumar, M. A robust method to authenticate car license plates using segmentation and ROI based approach. Smart Sustain. Built Environ. 2020, 9, 737–747. [Google Scholar] [CrossRef]
- Kim, T.-G.; Yun, B.-J.; Kim, T.-H.; Lee, J.-Y.; Park, K.-H.; Jeong, Y.; Kim, H.D. Recognition of vehicle license plates based on image processing. Appl. Sci. 2021, 11, 6292. [Google Scholar] [CrossRef]
- Walia, E.; Verma, A. Vehicle number plate detection using sobel edge detection technique. Int. J. Comput. Technol. 2010, 1, 2229–4333. [Google Scholar]
- Parasuraman, K.; Kumar, P.V. An efficient method for indian vehicle license plate extraction and character segmentation. In Proceedings of the IEEE International Conference on Computational Intelligence and Computing Research, Coimbatore, India, 28–29 December 2010. [Google Scholar]
- Lekhana, G.C.; Srikantaswamy, R. Real time license plate recognition system. Int. J. Eng. Res. Technol. 2012, 2, 2250–3536. [Google Scholar]
- Kamilaris, A.; Prenafeta-Boldú, F. A review of the use of convolutional neural networks in agriculture. J. Agric. Sci. 2018, 156, 312–322. [Google Scholar] [CrossRef]
- Hopfield, J.J. Neural networks and physical systems with emergent collective computational abilities. Proc. Natl. Acad. Sci. USA 1982, 79, 2554–2558. [Google Scholar] [CrossRef]
- Lin, C.-J.; Chuang, C.-C.; Lin, H.-Y. Edge-AI-based real-time automated license plate recognition. System. Appl. Sci. 2022, 12, 1445. [Google Scholar] [CrossRef]
- Yousaf, U.; Khan, A.; Ali, H.; Khan, F.G.; Rehman, Z.U.; Shah, S.; Ali, F.; Pack, S.; Ali, S. A deep learning based approach for localization and recognition of Pakistani vehicle license plates. Sensors 2021, 21, 7696. [Google Scholar] [CrossRef]
- Park, S.-H.; Yu, S.-B.; Kim, J.-A.; Yoon, H. An All-in-one vehicle type and license plate recognition system using YOLOv4. Sensors 2022, 22, 921. [Google Scholar] [CrossRef]
- Wang, H.; Li, Y.; Dang, L.-M.; Moon, H. Robust korean license plate recognition based on deep neural networks. Sensors 2021, 21, 4140. [Google Scholar] [CrossRef]
- Fattal, R. Single image dehazing. ACM Trans. Graph. 2008, 27, 1–9. [Google Scholar] [CrossRef]
- Narasimhan, S.G.; Nayar, S.K. Chromatic frame work for vision in bad weather. In Proceedings of the Conference on Computer Vision and Pattern Recognition, Hilton Head, SC, USA, 13–15 June 2000; pp. 598–605. [Google Scholar]
- Narasimhan, S.G.; Nayar, S.K. Vision and the atmosphere. Int. J. Comput. Vis. 2002, 48, 233–254. [Google Scholar] [CrossRef]
- Tan, R.T. Visibility in bad weather from a single image. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008. [Google Scholar]
- Levin, A.; Lischinski, D.; Weiss, Y. A closed form solution to natural image matting. In Proceedings of the Conference on Computer Vision and Pattern Recognition, New York, NY, USA, 17–22 June 2006; Volume 1, pp. 61–68. [Google Scholar]
- Wei, T.; Chen, D.; Zhou, W.; Liao, J.; Zhao, H.; Zhang, W.; Yu, N. Improved image matting via real-time user clicks and uncertainty estimation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 15374–15383. [Google Scholar]
- Cai, S.; Zhang, X.; Fan, H.; Huang, H.; Liu, J.; Liu, J.; Liu, J.; Wang, J.; Sun, J. Disentangled image matting. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 8819–8828. [Google Scholar]
- Aksoy, Y.; Aydin, T.O.; Pollefeys, M. Designing effective inter-pixel information flow for natural image matting. In Proceedings of the Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Xu, Z.; Yang, W.; Meng, A.; Lu, N.; Huang, H.; Ying, C.; Huang, L. Towards end-to-end license Plate detection and recognition: A large dataset and baseline. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 255–271. [Google Scholar]
- Menon, A.; Omman, B. Detection and recognition of multiple license plate from still images. In Proceedings of the 2018 International Conference on Circuits and Systems in Digital Enterprise Technology (ICCSDET), Kottayam, India, 21–22 December 2018. [Google Scholar]
- Wang, W.; Yang, J.; Chen, M.; Wang, P. A light CNN for end-to-end car license plates detection and recognition. IEEE Access 2019, 7, 173875–173883. [Google Scholar] [CrossRef]
- Murty, M.N.; Devi, V.S. Pattern Recognition. Undergraduate Topics in Computer Science; Springer: London, UK, 2011. [Google Scholar]
- Fung, C.H.; Wong, M.S.; Chan, P.W. Spatio-temporal data fusion for satellite images using Hopfield neural network. Remote Sens. 2019, 11, 2077. [Google Scholar] [CrossRef]
- Xu, X.; Chen, S. An optical image encryption method using Hopfield neural network. Entropy 2022, 24, 521. [Google Scholar] [CrossRef]
- Yu, F.; Yu, Q.; Chen, H.; Kong, X.; Mokbel, A.A.M.; Cai, S.; Du, S. Dynamic analysis and audio encryption application in IoT of a multi-scroll fractional-order memristive Hopfield neural network. Fractal Fract. 2022, 6, 370. [Google Scholar] [CrossRef]
- Mohd Jamaludin, S.Z.; Mohd Kasihmuddin, M.S.; Md Ismail, A.I.; Mansor, M.A.; Md Basir, M.F. Energy based logic mining analysis with Hopfield neural network for recruitment evaluation. Entropy 2021, 23, 40. [Google Scholar] [CrossRef]
- Akhmet, M.; Aruğaslan Çinçin, D.; Tleubergenova, M.; Nugayeva, Z. Unpredictable oscillations for Hopfield-type neural networks with delayed and advanced arguments. Mathematics 2021, 9, 571. [Google Scholar] [CrossRef]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rajebi, S.; Pedrammehr, S.; Mohajerpoor, R. A License Plate Recognition System with Robustness against Adverse Environmental Conditions Using Hopfield’s Neural Network. Axioms 2023, 12, 424. https://0-doi-org.brum.beds.ac.uk/10.3390/axioms12050424
Rajebi S, Pedrammehr S, Mohajerpoor R. A License Plate Recognition System with Robustness against Adverse Environmental Conditions Using Hopfield’s Neural Network. Axioms. 2023; 12(5):424. https://0-doi-org.brum.beds.ac.uk/10.3390/axioms12050424
Chicago/Turabian StyleRajebi, Saman, Siamak Pedrammehr, and Reza Mohajerpoor. 2023. "A License Plate Recognition System with Robustness against Adverse Environmental Conditions Using Hopfield’s Neural Network" Axioms 12, no. 5: 424. https://0-doi-org.brum.beds.ac.uk/10.3390/axioms12050424