1. Introduction
For fast linear movements under high loads, highly integrated Electro-Hydraulic Actuators (EHA) are often used in aerospace and industrial applications as an alternative to conventional hydraulic actuators. An EHA is a self-contained actuator that operates by electrical power. EHAs consist of at least a hydraulic cylinder, a hydraulic line system, a hydraulic pump, a motor, and power electronics.
Implementing a closed-loop position control for an EHA is difficult due to nonlinearities [
1] and uncertainties such as friction or the dynamics of the piston pump [
2]. Therefore, a primary research focus is the development and validation of different control approaches. For this purpose, classical Proportional–Integral–Derivative (PID) control, control including fuzzy logic [
3,
4,
5], observer-based controls [
6,
7,
8,
9,
10,
11], adaptive trajectory controls [
12,
13], sliding mode control [
14,
15,
16], or hybrids of the named approaches [
17] are used to solve this problem. For application, the parameterization method is also of great importance in addition to the investigation of control schemes.
There are different methods for adjusting controls: metaheuristics, analytical methods, and multi-objective optimization, some of which rely on machine learning. For metaheuristics and other manual experience-based “trial-and-error” approaches, as often performed in industry, a high effort is required, especially if multiple operating points, such as different loads, need to be tested. Therefore, these methods are primarily used when a physical EHA, but not a suitable model of an EHA, is available for testing.
The mathematical modeling in terms of poles and zeros for the use of analytical methods is difficult for the EHA, since nonlinearities, such as friction and uncertainties in the parameterization, can lead to significant deviations in the overall result. A solution to overcome this problem is the system identification of a physical EHA on a test bench. Izzuddin et al. [
18] obtained a linear transfer function in discrete form from multi-sine, as well as continuous step input via Auto-Regressive Exogenous (ARX) system identification, and compared control algorithms on the obtained simulation and tests on the test bench. Similar approaches were used to obtain an ARX model from experimental data and to validate the same controller in simulation and on the test bench, which was used to gather the input for system identification [
19,
20,
21]. Since a physical system must be available to perform the system identification, this approach is unsuitable for early design optimization in product development, where mature prototypes are unavailable.
In addition to the previously mentioned approaches, a frequently used approach is a model-based optimization of the control system. For example, Wonohadidjojo et al. [
22] developed an analytical model of the electrohydraulic servo system for PID optimization with Particle Swarm Optimization (PSO), modeling friction and internal leakage. Shern et al. [
23] used a PID optimization with improved PSO, which chose between optimization of settling time or overshoot for the analytical model. The PSO was improved by combining two fitness functions for overshoot and settling time with linear weight summation [
24]. Other optimization algorithms used for PID optimization for an EHA were, for example Genetic Algorithms [
25,
26,
27], the Nelder–Mead approach [
28], a hybrid algorithm of PSO, and gravitational search algorithms [
29] or beetle antennae search algorithms [
30].
Performance validation is either based on simulations or simulations and bench testing separately, similar to the development of other control methods. Comparison of simulation results with test bench results is not conducted, except in cases where the simulation model is parameterized with test bench results, by system identification, usually with the ARX model. In early product development, there is usually no physical EHA that can be tested on a test bench. Thus, no data are available for system identification. The data available in the early stages of product development are generally limited to individual components, but not to the system behavior of the EHA.
For an early optimization of the controller in the early stages of product development, it is necessary to optimize the control with a simulation model that is independent of the measurement data from a physical EHA which was tested on a test bench beforehand. The problem is that the validity of simulation models of an EHA parameterized only by data of individual components is unclear, and thus control optimization cannot be performed.
Therefore, this paper investigates how to model an EHA with a grey-box model. This grey-box model is used to optimize the controller parameters with a PSO. Finally, the optimized controller parameters are set on an EHA on a test bench, allowing the comparison of the dynamic behavior of the EHA on the test bench with the dynamic behavior of the simulation model. The main contributions of this article are summarized as follows:
Modeling of an EHA with a comprehensive grey-box model independent of data from bench tests, with the publication of all relevant parameters.
Application of a method for multi-objective optimization of PID control for optimal control parameters of the EHA using a simulation model and two load cases.
Comparison of the system behavior between the simulation model and the test bench with the help of step responses using the optimized control parameters for both load cases.
4. Discussion
In this section, the results of the method for multi-objective optimization of PID control on the simulation model are discussed. Then, the validation of the simulation model using a test bench is discussed as the main result. Finally, limitations and further research directions are elaborated.
4.1. Discussion of the Results of the Method for Multi-Objective Optimization of PID Control
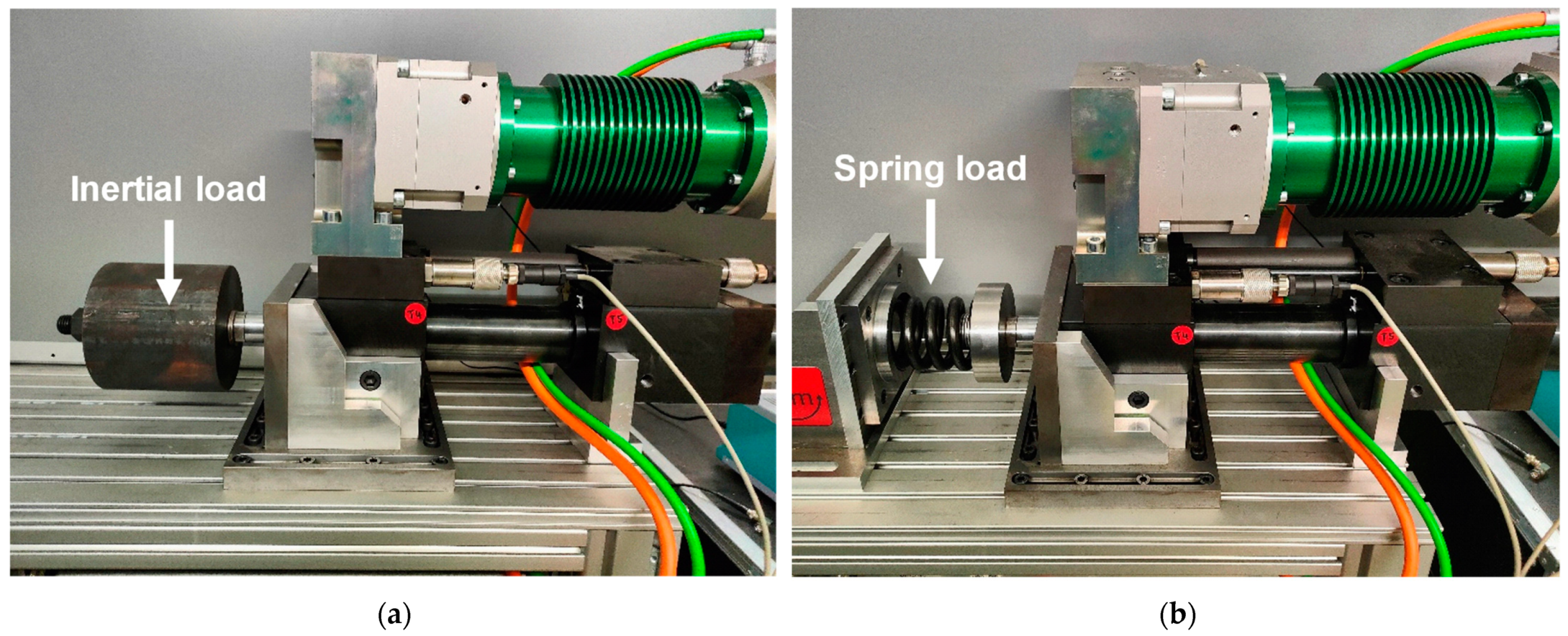
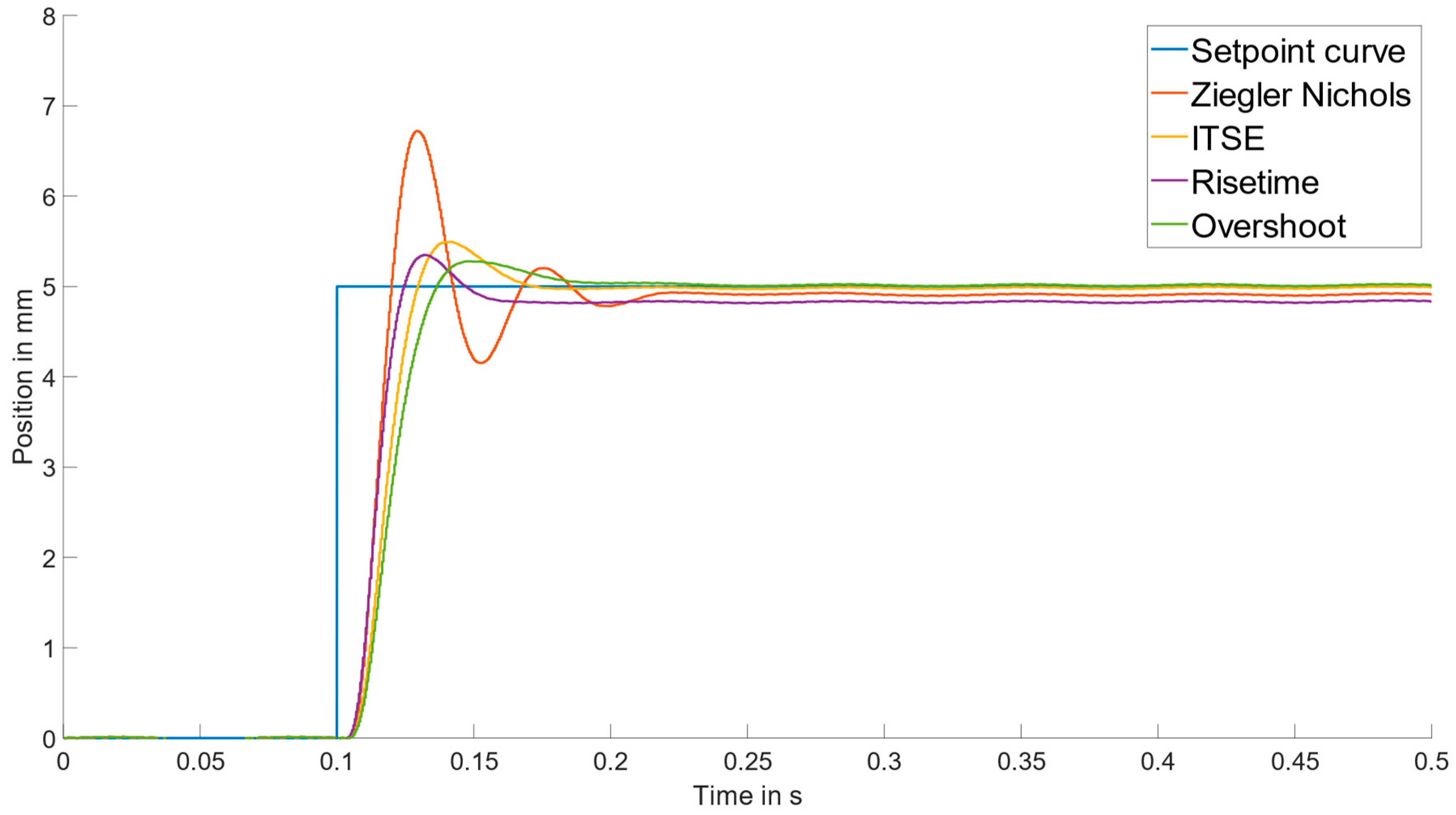
The results show the expected results for the inertial load in
Figure 7 for the four parameter sets. While there is a strong overshoot in Ziegler and Nichols, as expected, the three optimizations show a local Pareto-optimum concerning the primary optimization criterion. From the PID values in
Table 3, it can be seen that the proportional gain differs significantly. For the optimization of rise time, a high derivative part and a low integral part are found. For the optimization of ITSE and overshoot, a high integral part and a low derivative part are found.
The results for spring loading in
Figure 8 also show the expected results in all cases. The results are similar to those for the inertia. For Ziegler and Nichols, almost similar behavior was obtained with the same PID values, but a permanent deviation occurs due to the constant force of the compressed spring. The PID values of
Table 3 and
Table 4 differ mainly in the significantly higher integral part. As expected, the derivative part is most significant for the rise time with the smallest integral part.
The results show that the optimization method, which was designed and validated on rotating systems, also works for translational systems such as the EHA. For the validation of the simulation, the method must reach different local optima so that the validation can be performed with different PID values. Thus, the method has served its purpose and the local optima are suitable for validating the simulation. The use of both loads has proven to be suitable since, in this way, different integral parts and also different operating points can be validated.
The selection of the best PID values depends on the requirements of the overall system, for example, how fast the system should respond and how significant the overshoot should be. The method is thus a suitable way to optimize the PID control based on simple predefined objectives. However, a valid simulation model is a prerequisite. Therefore, the simulation model was validated in
Section 3.2 by comparing these step responses with the step responses obtained on the test bench.
4.2. Validation of the Simulation Model with the Test Bench
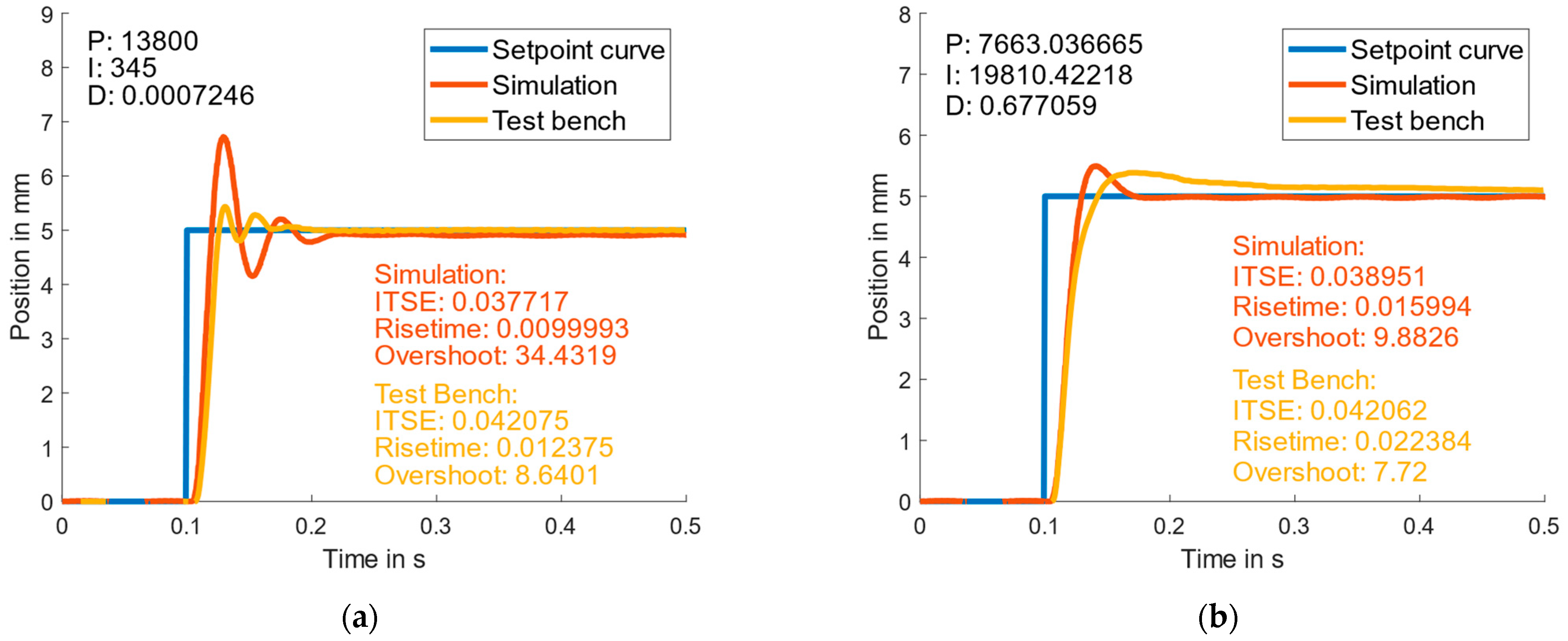
The validation results for the four parameter sets of the inertial load show partially significant differences between the step responses obtained with the simulation model and on the test bench.
The deviation of the rise time is due to different behavior between the results of the simulation and test bench. While the increase in the position of the paths is similar at the beginning, a sudden change in the slope is observed on the test rig at an amplitude of 4 mm in most cases. Examples are the system characterization, first and second optimization loop for inertial load, where the change of the gradient is present in different magnitudes. For the second optimization loop, a similar behavior with only a tiny change of the gradient at 4 mm is observed. This can be explained by an oscillation between the outer loop of the position controller and the inner loop of the speed controller, which is shown in
Figure 3. This oscillation is not adequately represented in the simulation model for the shown operating points shown. A second explanation is the influence of a limitation in the inverter, which was not represented in the simulation.
The deviation in overshoot is due to the damping of the system, which is difficult to simulate in absolute values. It seems that the hardware system has a higher damping coefficient than in the simulation. A second cause is probably the previously discussed change in the gradient.
Another phenomenon is the different response to a high integral part of the controller in the spring load. While the simulation quickly reaches the setpoint at a high integral part, a low integral part results in a permanent offset of the amplitude. The results of the test bench reach the setpoint very slowly at a high integral part of the controller. With a low integral part, the settling time is very slow. This could be explained by the control implemented in the inverter. It must be noted that modeling the control implemented in the inverter is a highly complex task, since not all information, such as the stored motor model, are available. Furthermore, it is unclear how the internal filters of the inverter are designed in detail.
Overall, by comparing the step responses of the simulation model with the test bench results for the inertia or spring load, the key phenomenon is the change in slope at an amplitude of 4 mm, which can be explained by the interaction of the cascaded control on the test rig, across almost all results.
The deviation between the results obtained with the simulation model and with the test bench shows that the simulation model of an EHA parameterized only on data of individual components is not completely valid for control optimization. Nevertheless, it indicates the behavior of the control system that can already be used in product development if no physical EHA is available. Thus, the modeling approach and the modeling itself provide added value to the application. If a physical EHA is available, performing a system identification, e.g., via Regressive Exogenous (ARX), as conducted by [
19,
20,
21], can be performed to obtain a better fit between the results of the simulation model and the test bench.
4.3. Limitations and Further Research Directions
The results show a strong dependence of the internal control loop on the speed of the inverter. Therefore, modeling and validation of the internal control loop should be a basic prerequisite for the successful execution of a grey-box or white-box simulation. However, if the internal control of the simulation model is not matched to the test bench at a high level of detail, the probability of success is low. In this case, interactions in the cascaded control, as in our study, can influence the overall result. One possibility would be to use the method for optimizing the PID control to parameterize the speed control loop in the simulation model.
The quality of the grey-box simulations depends mainly on the amount and quality of the available data and information. In our case, we had many parameters available, as can be seen from
Appendix A. The problem was mainly the lack of information about the cascaded control. Thus, the success of a similar approach depends on the available information.
In the grey-box simulation, many phenomena, such as sensor noise, were implemented. However, there are other phenomena, such as the capacity and inductivity of the pipes, that could have been improved with the appropriate information. To fully evaluate the system reliability of the EHA with the optimized position control used here, the thermal domain would also need to be considered, as temperature also has an impact on the dynamics of the system.
In our study, we investigated an EHA with two loads at a defined step response. Only some of the operating points that the EHA can perform were investigated. More operating points, and also other EHA, should be considered for transferring the results. This does not affect the core statement of this work, which is that the grey-box simulation is only suitable as an indication for control optimization. This can be assumed because the difficulties are present in all EHAs, especially due to the cascaded control. Instead, the amount and quality of information, as mentioned above, take an overriding role.
Given the already achieved convergence of results when using a grey-box model, there is still great potential and further research directions. Future work should investigate if it is possible to obtain better results with more information. To draw insights from the comparison, the representation of the parameters and the mapped phenomena or physical effects, as in this study, are necessary.
Another research direction is to use the simulation model of the EHA as a digital twin by connecting it directly to the EHA on the test bench. By continuously comparing the digital and physical EHA, the deviations can be identified and used to improve the simulation by parameterizing physical parameters, such as friction, that are difficult by generic white-box models. A high model quality can be achieved without relying on a black-box model, which can only be transferred to similar EHAs to a limited extent.
To fully evaluate the system reliability of the EHA with the position control optimized here, the thermal domain should also be considered as well, as temperature also has an impact on the dynamics of the system. For this purpose, thermal coupling systems must be used so that all relevant domains are also taken into account in the sense of the digital twin, to obtain a high degree of reliability concerning the findings obtained.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









