
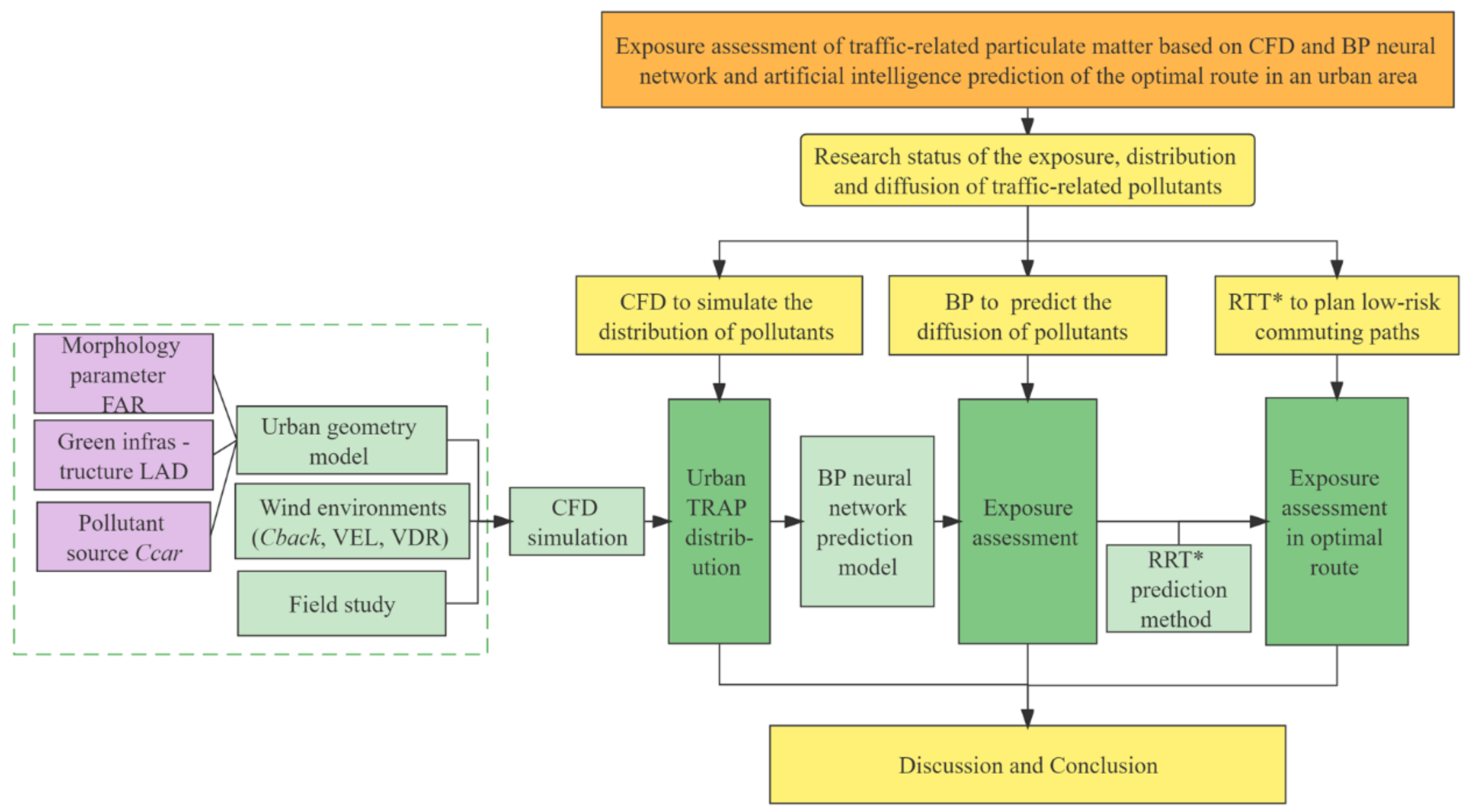
Exposure Assessment of Traffic-Related Air Pollution Based on CFD and BP Neural Network and Artificial Intelligence Prediction of Optimal Route in an Urban Area



Abstract
:1. Introduction
2. Methodology
2.1. CFD Simulation
2.1.1. Fundamental Theory
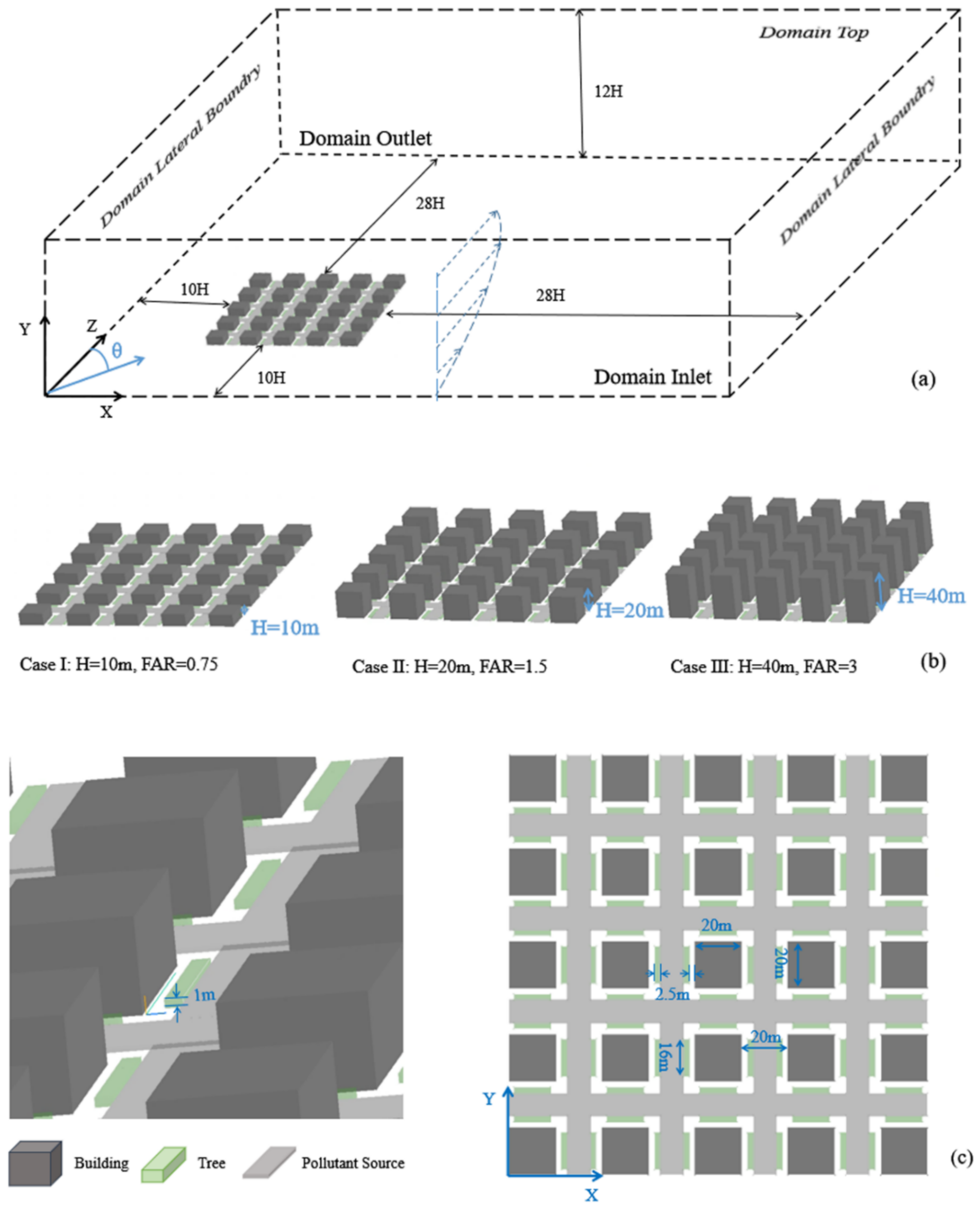
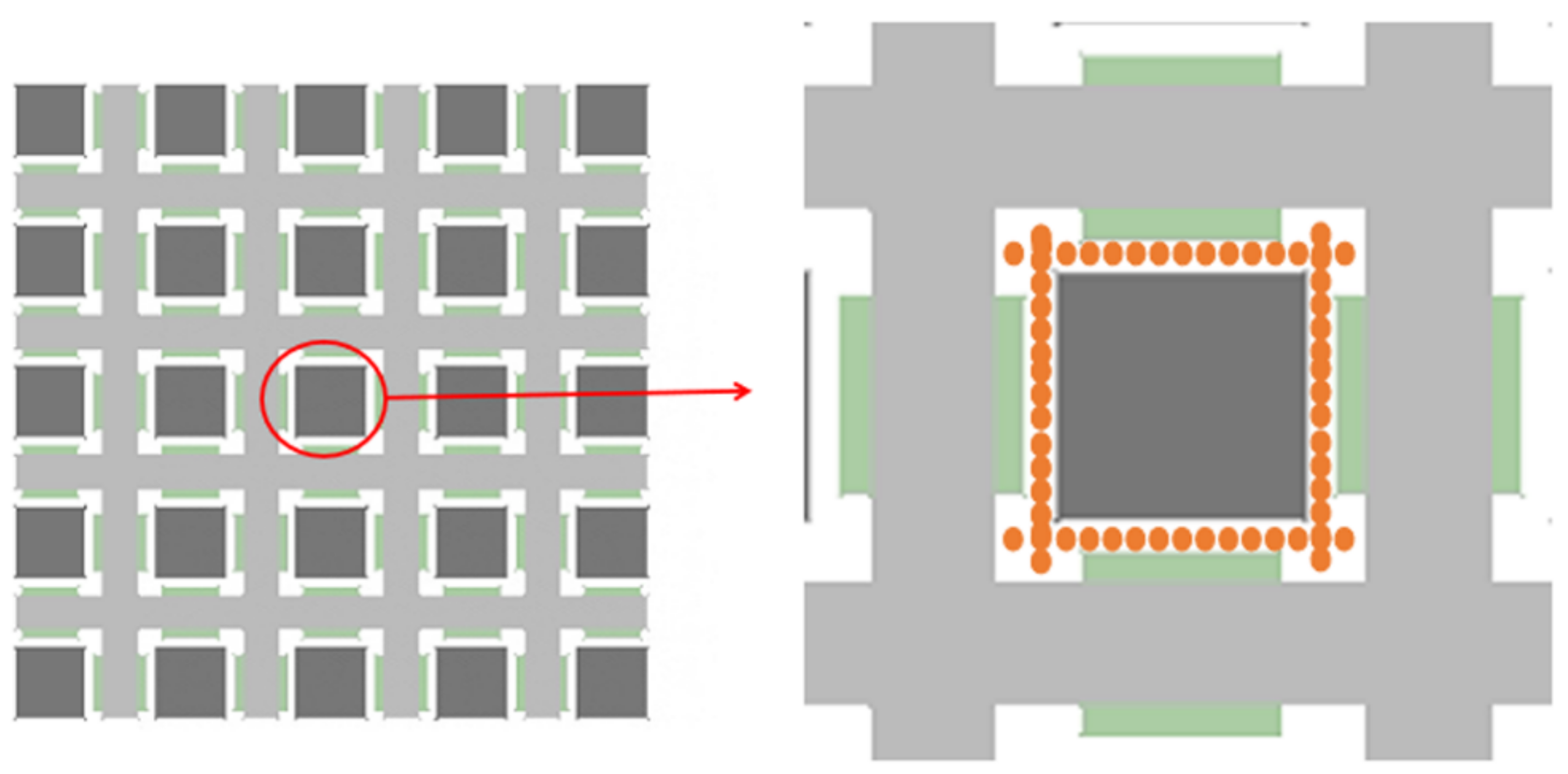
2.1.2. Urban Model
2.1.3. Case Description
2.1.4. Grid Description
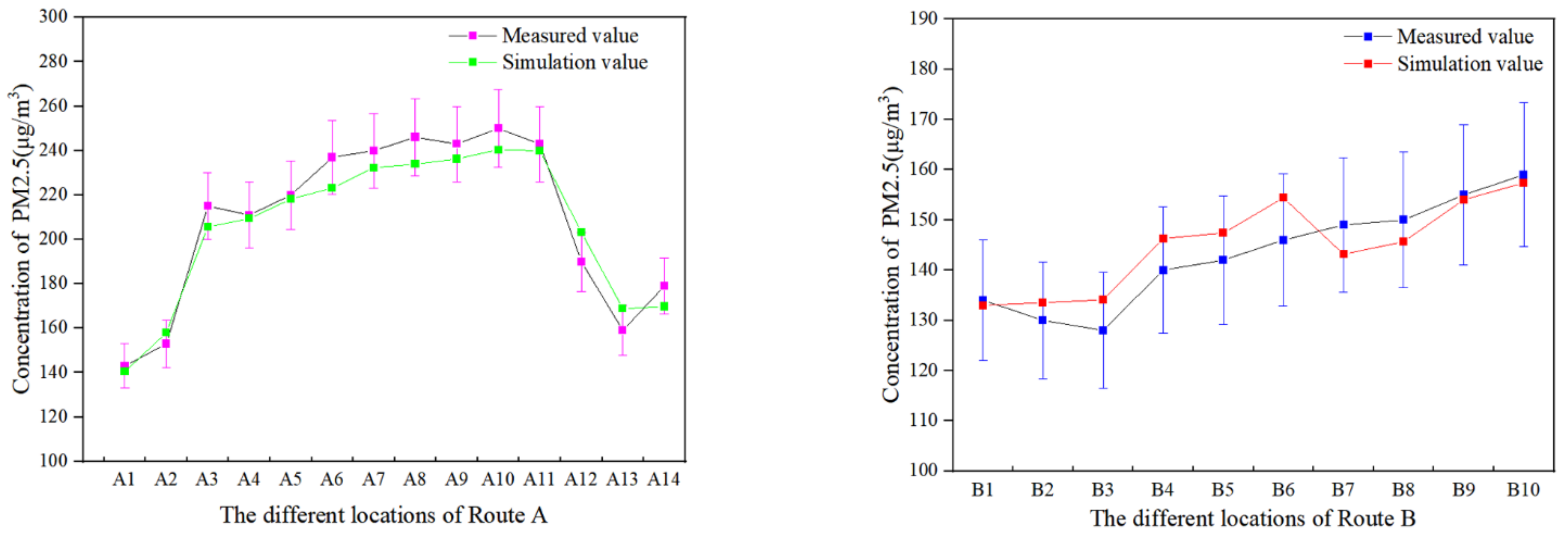
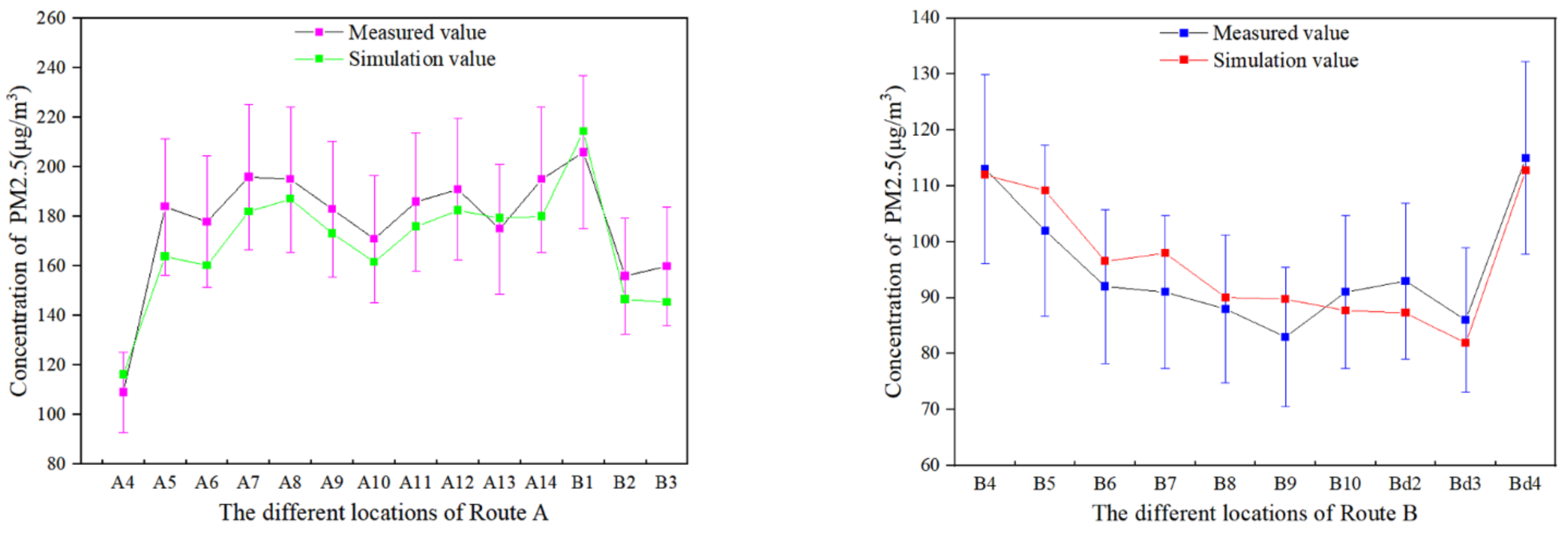
2.1.5. Simulation Validation
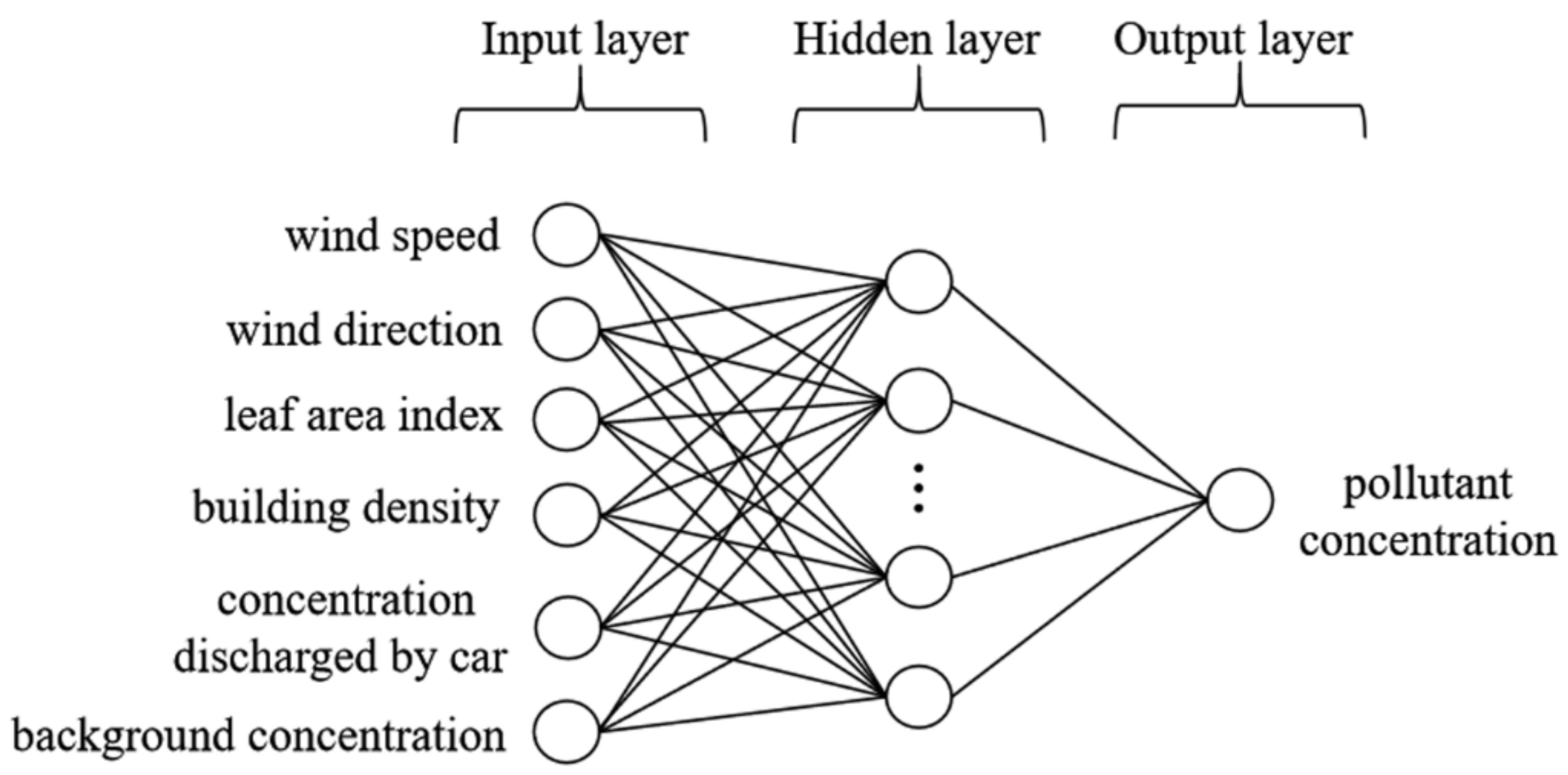
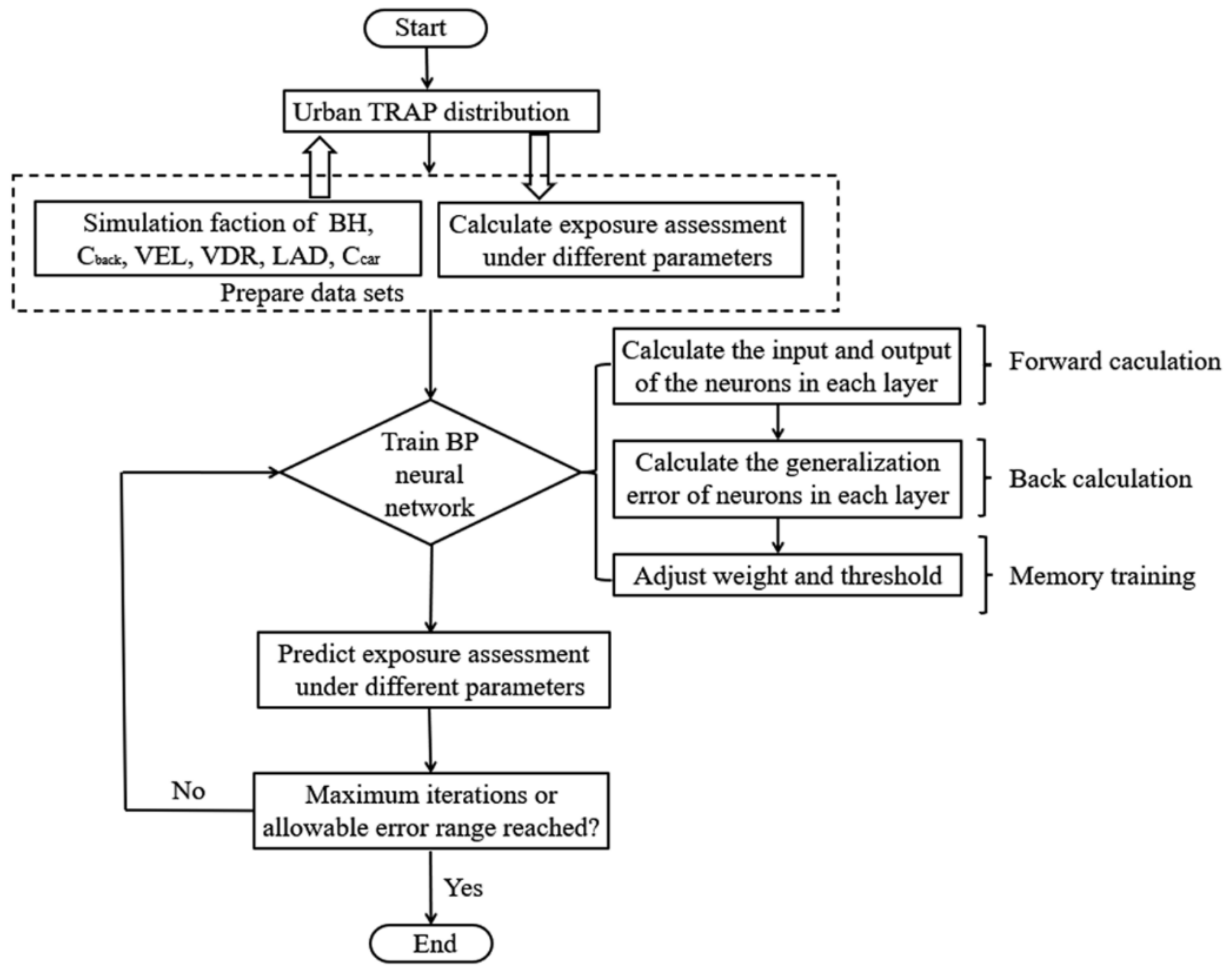
2.2. BP Neural Network
2.3. Optimal Path Prediction
2.3.1. RRT* Algorithm
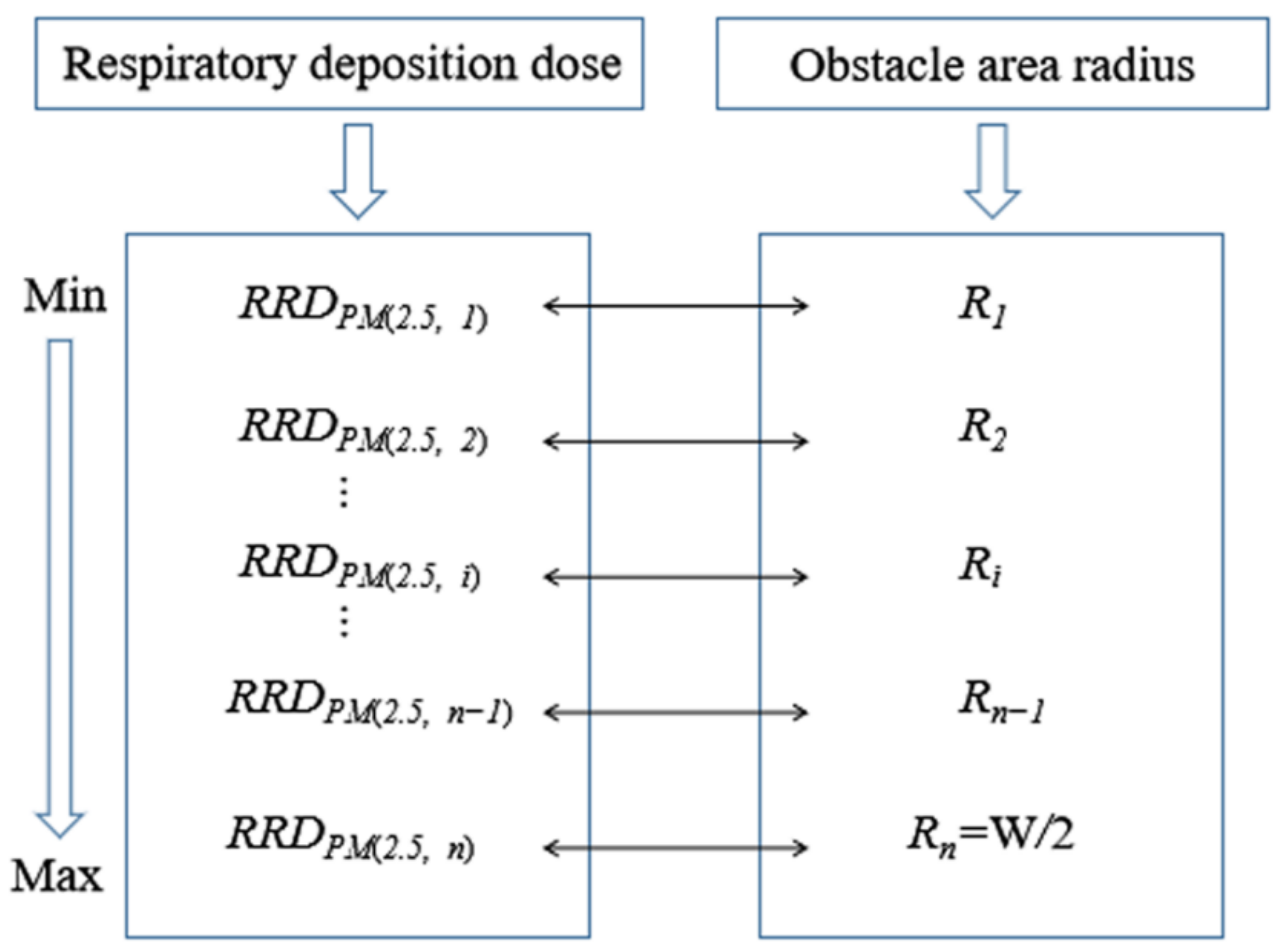
2.3.2. Exposure Evaluation Indices
2.3.3. The RRT* Path Planning Algorithm
3. Results
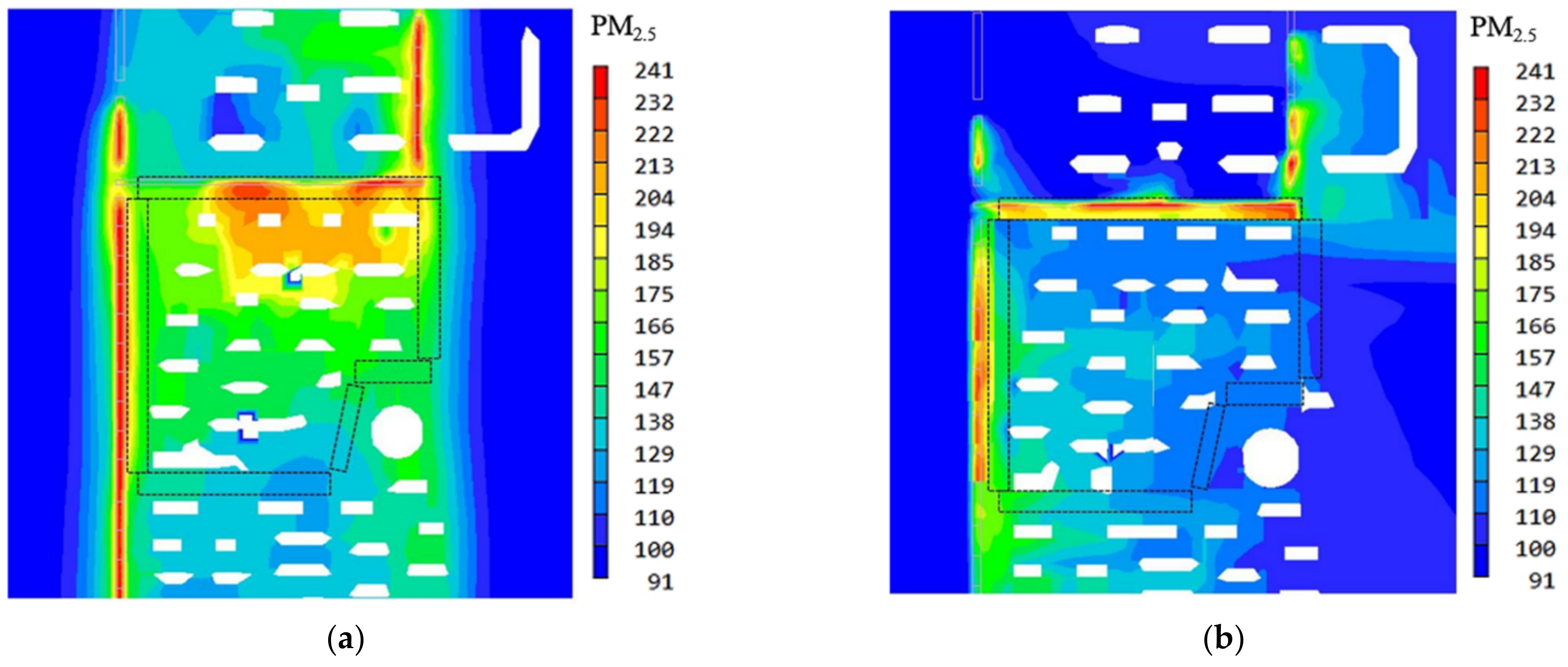
3.1. CFD Simulation Results
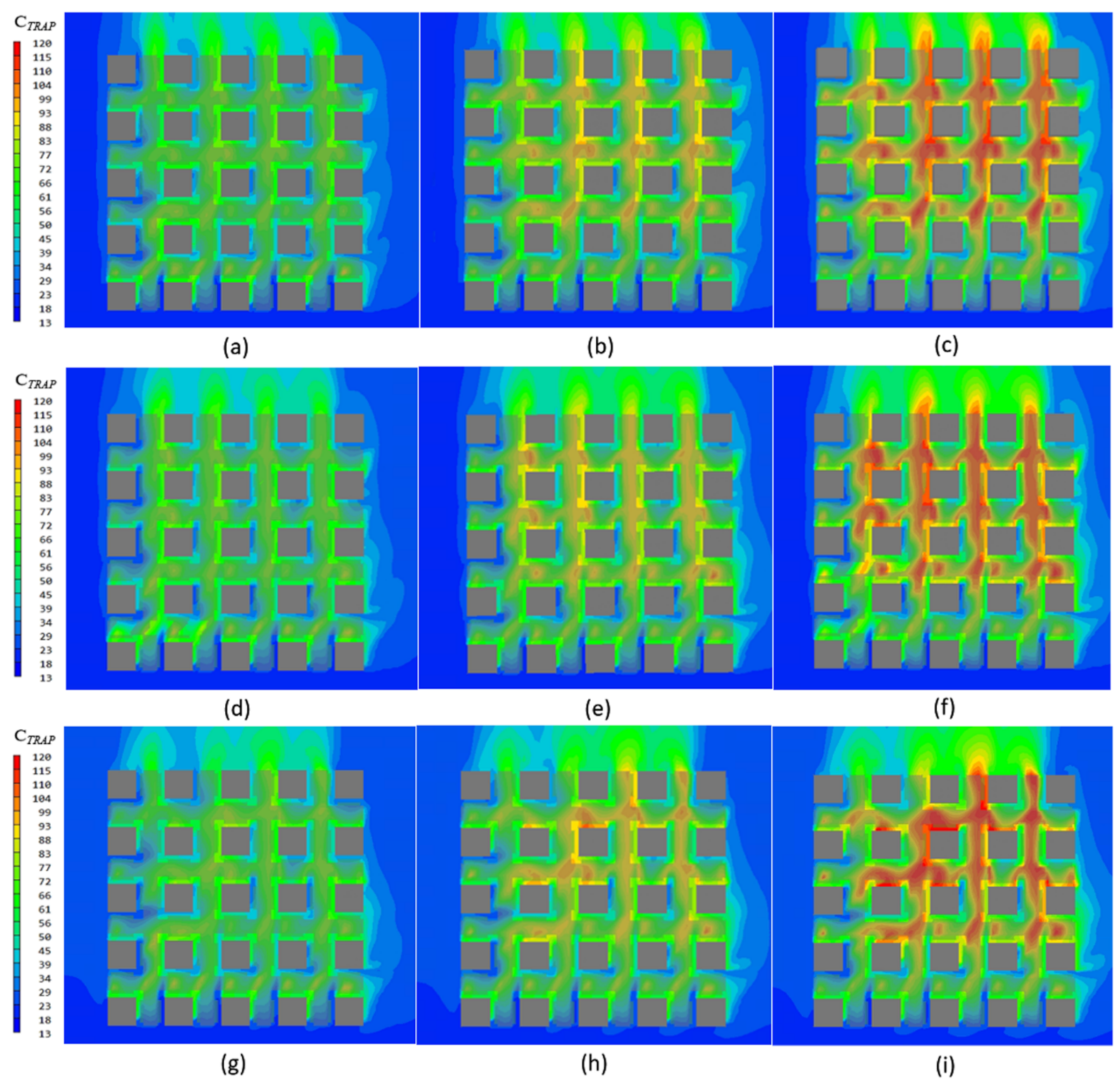
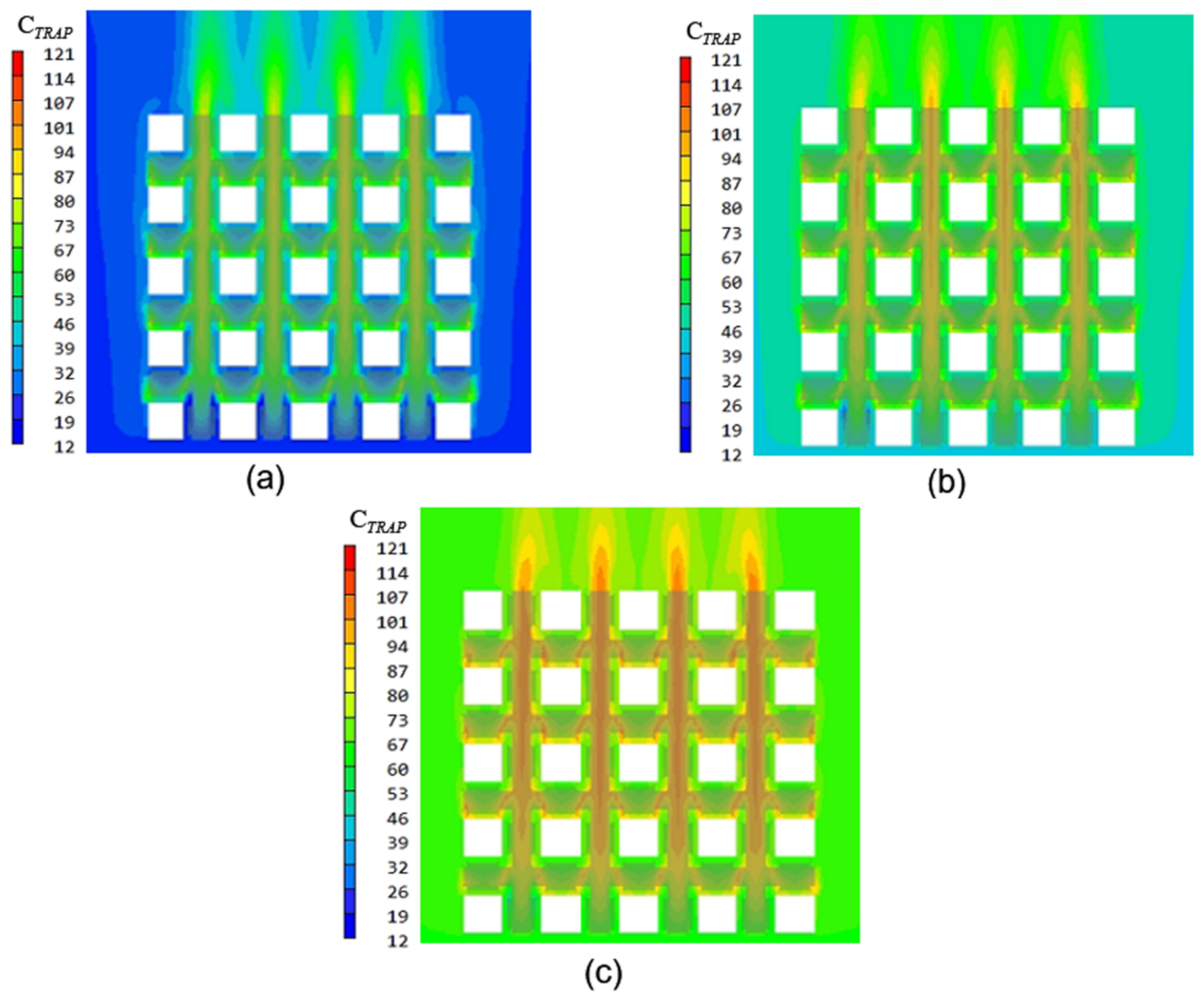
3.1.1. Impacts of Pollutant Concentration Discharged by Cars on the Pollutant Distribution and Diffusion
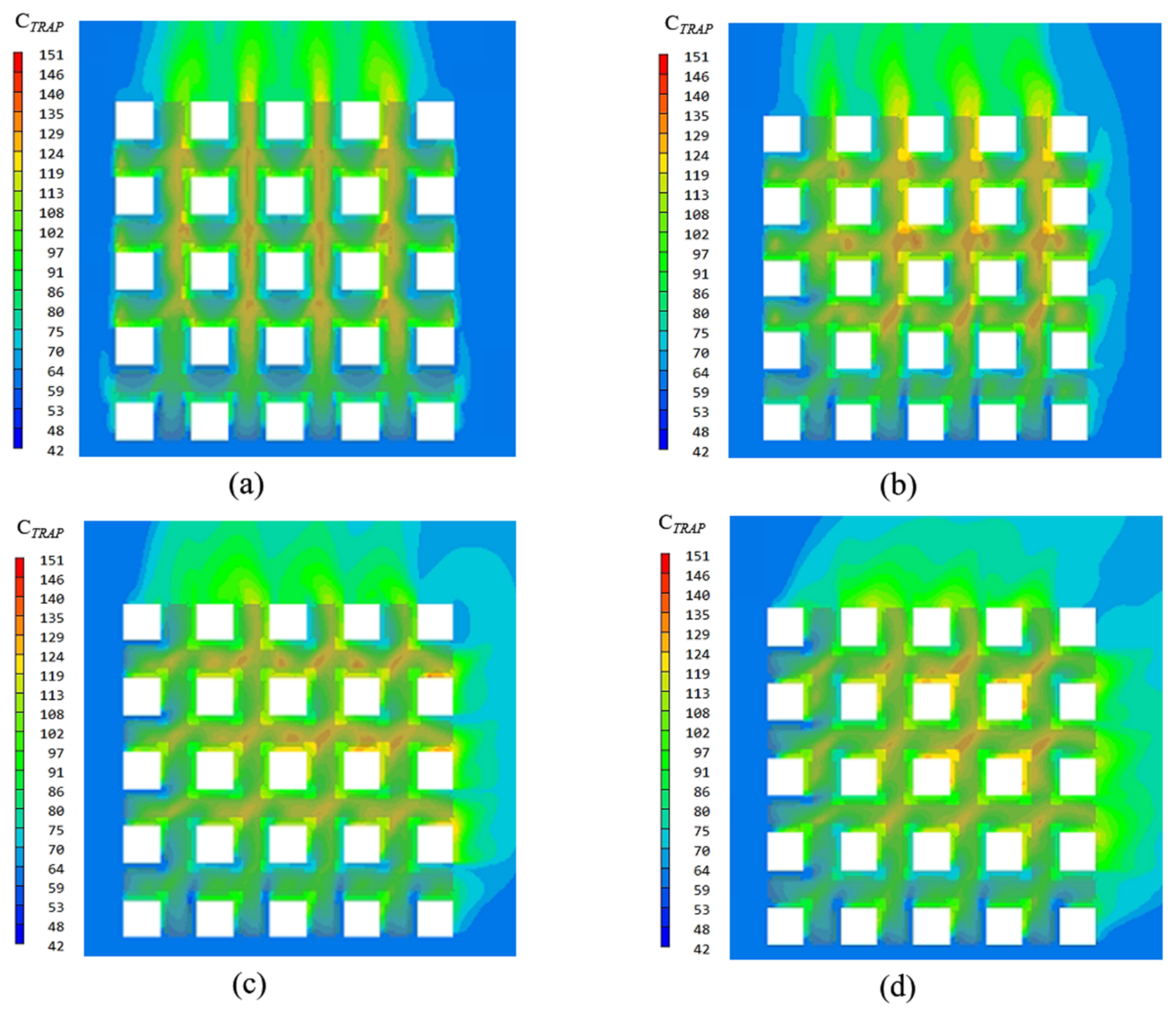
3.1.2. Impacts of Wind Direction on the Pollutant Distribution and Diffusion
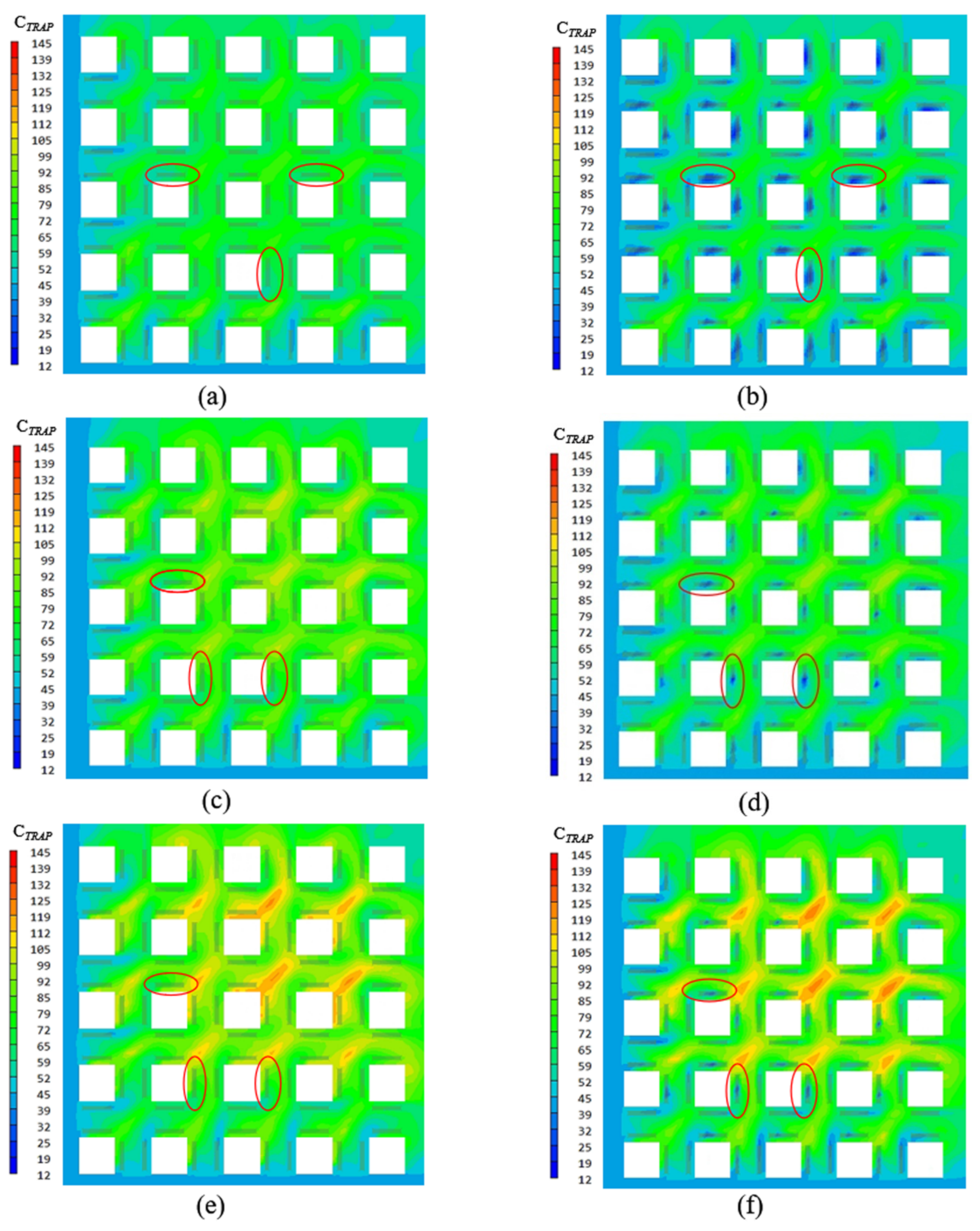
3.1.3. Impacts of Trees on the Distribution and Diffusion of Pollutants
3.1.4. Impacts of Background Concentration on the Pollutant Distribution
3.2. BP Neural Network Prediction
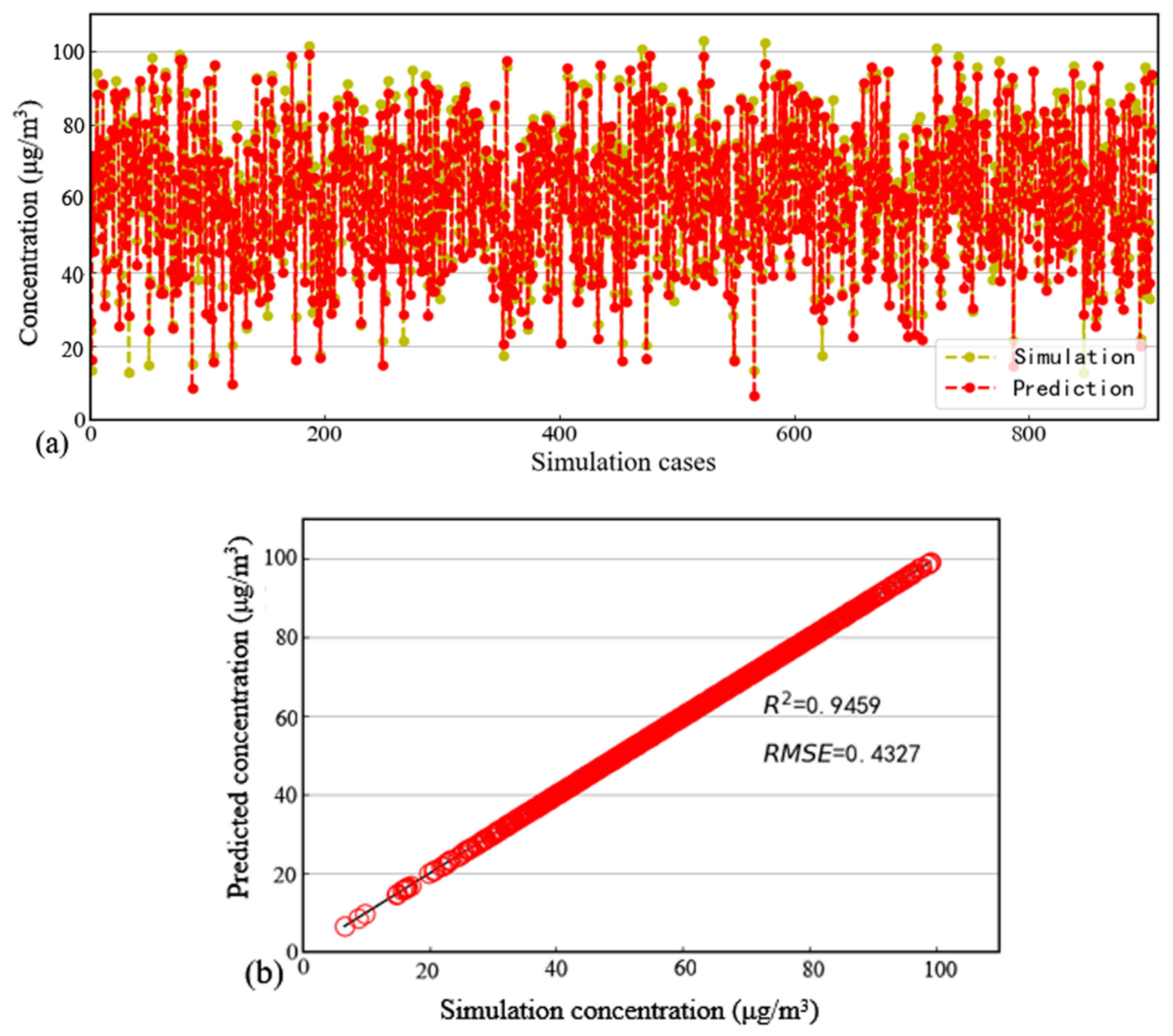
3.2.1. Training Result of BP Neural Network
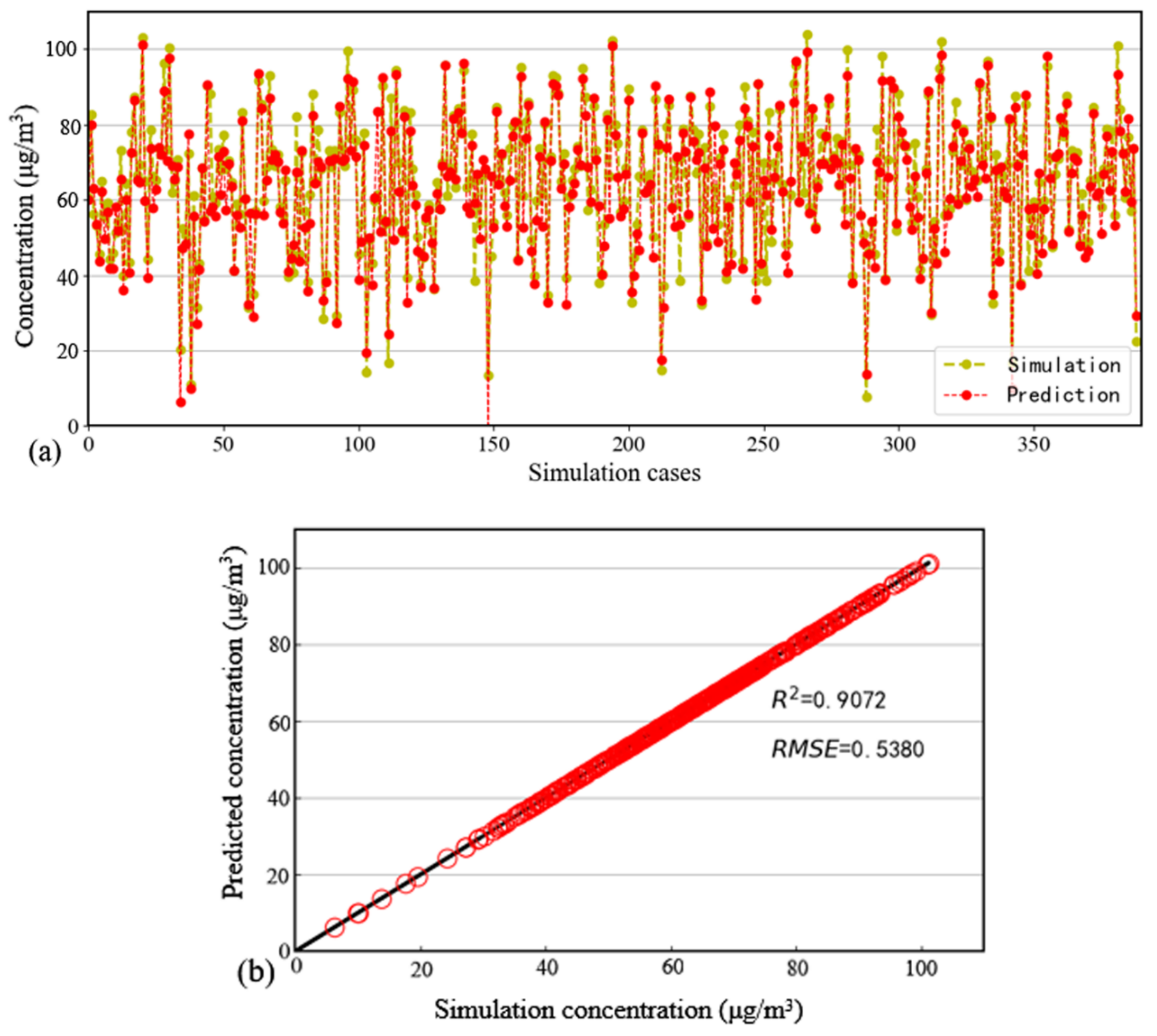
3.2.2. Validation Result of BP Neural Network
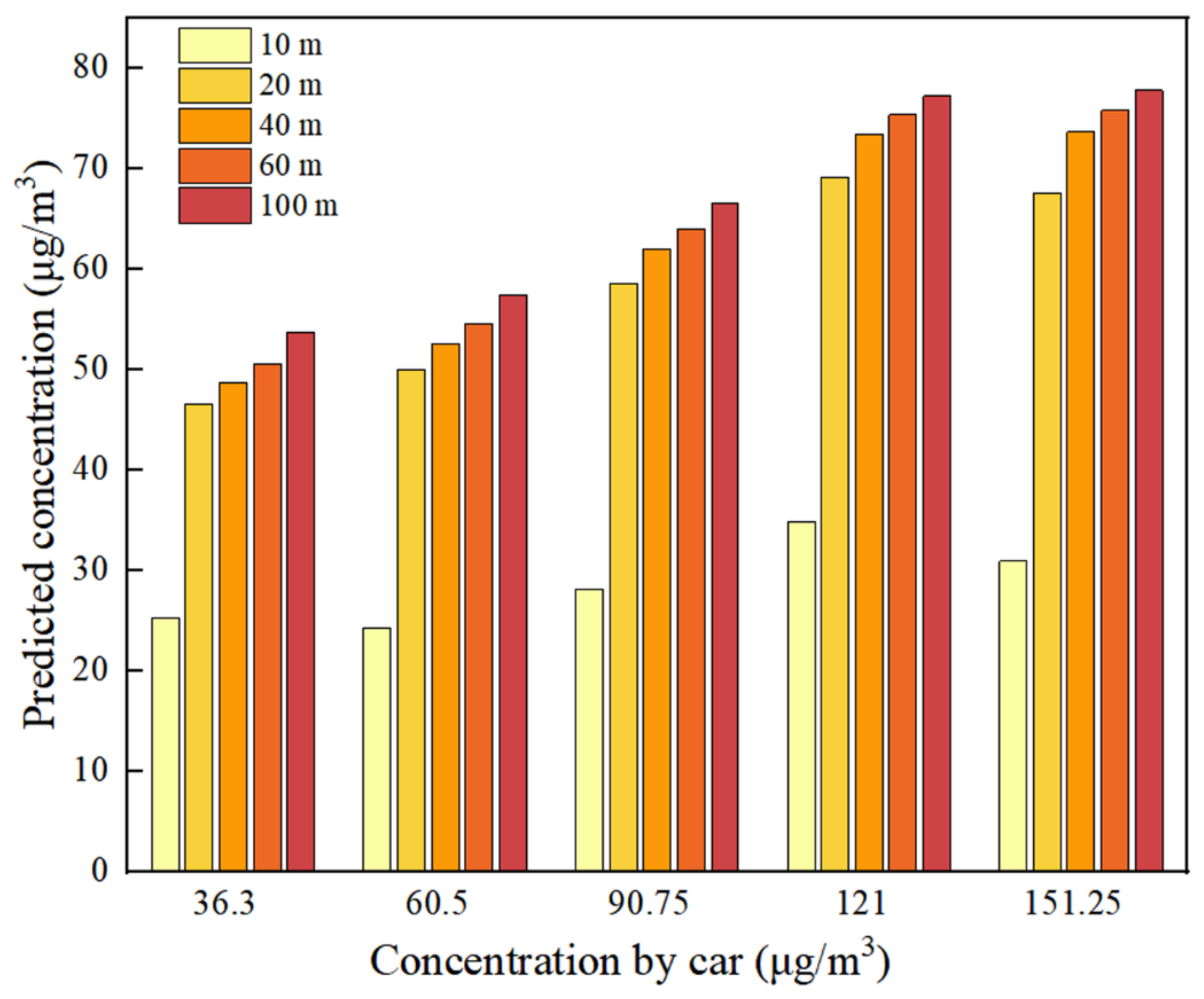
3.2.3. Prediction Results of BP Neural Network
3.3. Optimal Routes Obtained from the RRT* Algorithm
3.3.1. Exposure Analysis
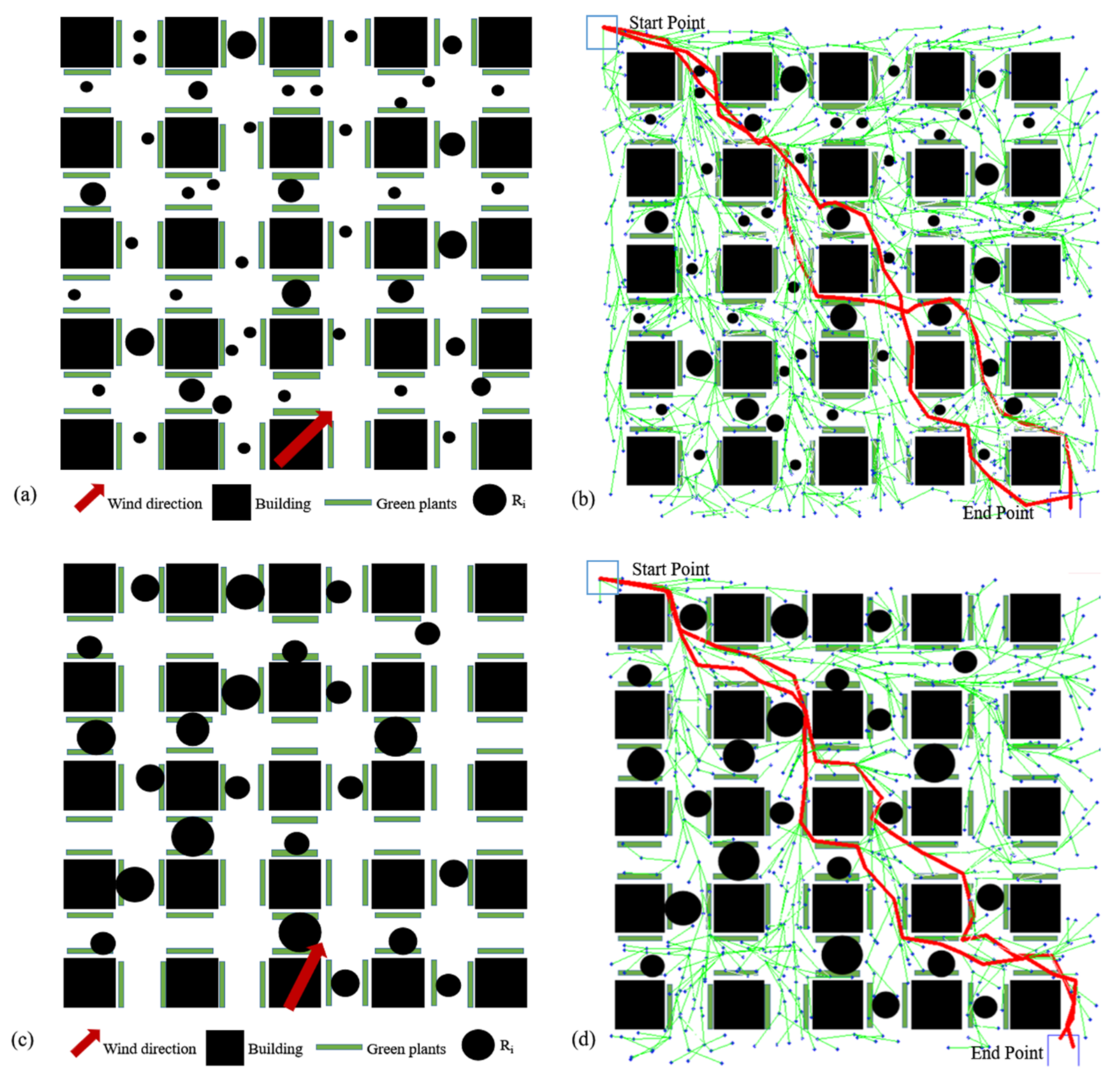
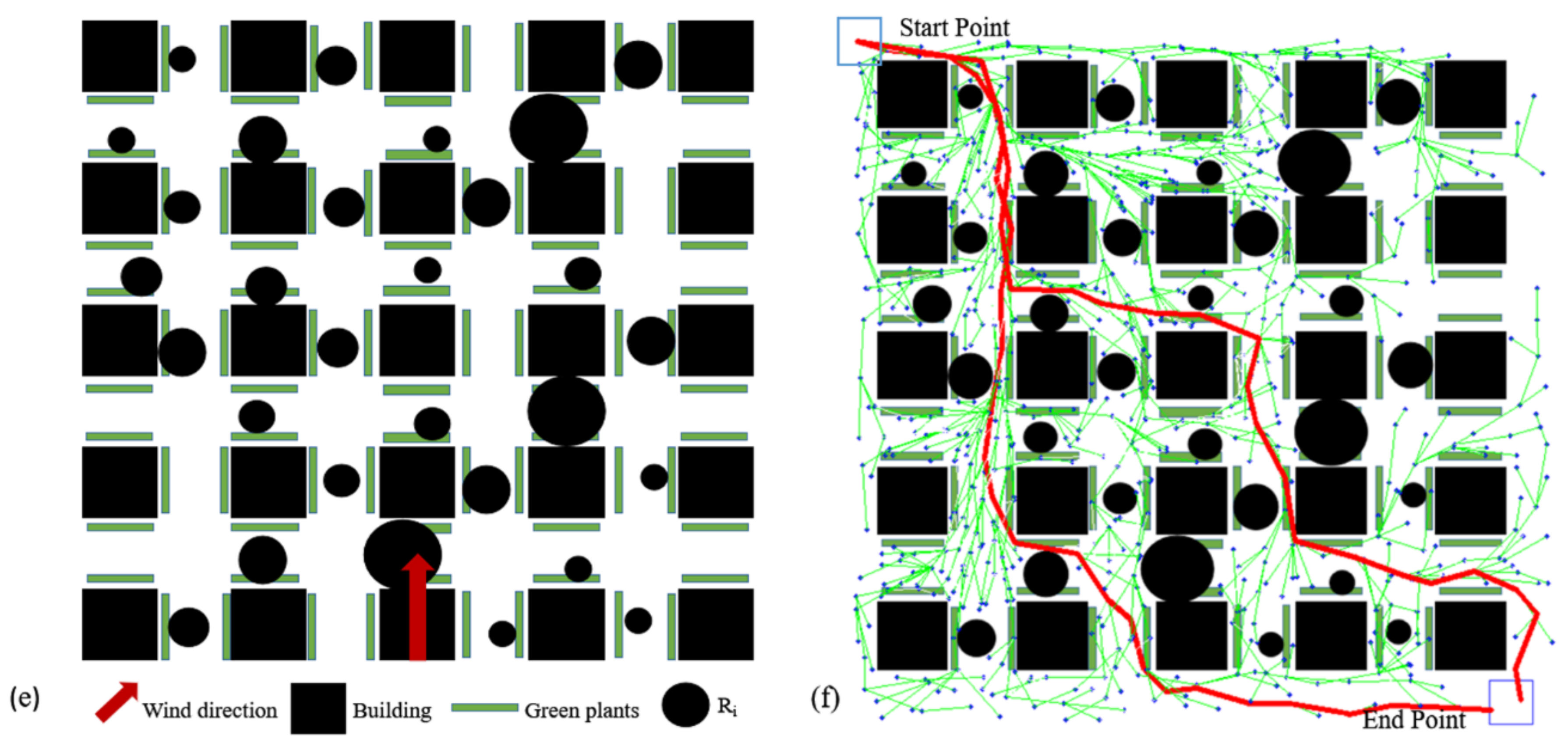
3.3.2. Optimal Routes
4. Discussion
5. Conclusions
- (1)
- The concentration of traffic-related fine particles during commuting was related to the pollutant concentration discharged by cars. The higher the traffic flow, the higher the pollutant concentration was, and the higher the exposure risk of the commuters was. A 30.25 μg/m3 increase in the Ccar resulted in a 7–13 μg/m3 increase in the TRAP concentration on sidewalks.
- (2)
- The wind environment significantly affected the pollutant distribution and diffusion. The dilution level of the pollutants influenced by the wind differed for different Ccar values, e.g., CTRAP decreased by about 2.8% for every 2 m/s increase in VEL at the Ccar of 90.75 μg/m3. Different wind directions also resulted in different levels of diffusion of traffic-related pollutants, leading to large differences in the pollutant distribution on different routes. The pollutant concentration was low in windy areas, and the pollutants accumulated in the downwind areas of buildings. Therefore, the effects of the wind direction and wind speed should be considered in the design of urban road networks and road direction.
- (3)
- Vegetation diluted the pollutant concentration. In this study, a large leaf area density significantly reduced the pollutant concentration at the pedestrian level. Therefore, trees with a high leaf area density should be considered for street greening.
- (4)
- The BP neural network prediction model had a high R2 value during training. The results showed that the proposed model could accurately predict the traffic-related particulate matter concentration to provide data for optimizing the commuting routes.
- (5)
- The BP prediction results were converted into the exposure risk and were mapped to perform commuting path optimization using the RRT* algorithm. The optimum commuter route had the lowest pollution concentration to improve the health of citizens.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Nomenclature | |
| b1 | number of deviations in the input layer |
| b2 | number of deviations in the output layer |
| C | particle concentration at the inlet, µg/m3 |
| Cc | Cunningham factor induced by slippage |
| Cd | leaf drag coefficient, Ns/m |
| Cμ | empirical constant |
| dp | particle diameter, m |
| f | typical respiratory rate, times/s |
| Fj | resultant force exerted upon the particle, m/s2 |
| g | gravitational vector, m/s2 |
| h | average height of the canopy, m |
| k | turbulent kinetic energy, m2/s2 |
| p | number of measurements |
| pressure of the fluid, Pa | |
| Pk | volumetric production rate of k by shear forces |
| Sκ | turbulent kinetic energy |
| Sε | turbulent dissipation rate for trees |
| Sc | formation rate of the particle sources, kg/m3·s |
| Ssink | mass of particles absorbed by the vegetation, µg/m3 |
| Sresuspension | secondary pollutant, µg/m3·s |
| Smj | momentum source of the particle in the j direction, kg/(m2·s2) |
| tj | target value |
| u* | friction velocity, m/s |
| velocity in the direction i, m/s | |
| uslip,j | gravitational settling velocity of particles in direction j, m/s |
| U0 | velocity at the height of 10 m |
| |U| | magnitude of the superficial velocity vector, m/s |
| v | magnitude of air velocity, m/s |
| Vd | particle deposition velocity on the foliage in m/s |
| wi | weighting factor of the input |
| w1 | connection weight matrix from the input layer to the hidden layer |
| w2 | connection weight matrix from the hidden layer to the output layer |
| xi | input of the neuron |
| x(k) | output vector from the hidden layer |
| z | weighted input |
| Abbreviation | |
| ANN | artificial neural network |
| BH | building height |
| BP | back propagation |
| CFD | computational fluid dynamics |
| DFi | deposition rate of the group i particle |
| FAR | floor area ratio |
| IF | inhalable fraction |
| LAD | leaf area density |
| LAI | leaf area index |
| LES | large eddy simulations |
| MLP | multi-layer perceptron |
| PM2.5 | particulate matter with an aerodynamic diameter less than 2.5 μm |
| PMi | concentration of the group i particles, μg/m3 |
| RANS | Reynolds-averaged Navier–Stokes |
| RDD | respiratory deposition dose |
| RMSE | root mean square error |
| RRT* | rapidly exploring random tree star algorithm |
| TRAP | traffic-related air pollution |
| VT | tidal volume, m3 |
| VDR | angle between the wind direction and true north |
| VEL | wind velocity, m/s |
| WD | street width, m |
| Greek letters | |
| α(z) | Leaf area density, m2/m3 |
| βp | portion of turbulent kinetic energy |
| δij | Kronecker delta |
| ε | turbulent dissipation rate |
| εp | turbulent diffusivity, m2/s |
| κv | von Kármán constant |
| µ | molecular kinematic viscosity of air, Ns/m2 |
| ν | kinematic viscosity |
| νt | kinematic turbulent viscosity |
| ρ | fluid density, kg/m3 |
| τp | the particle relaxation time, s |
| Subscripts | |
| i | the direction i |
| j | the direction j |
| t | turbulent |
References
- An, F.; Liu, J.; Lu, W.; Jareemit, D. A review of the effect of traffic-related air pollution around schools on student health and its mitigation. J. Transp. Health 2021, 23, 101249. [Google Scholar] [CrossRef]
- Ji, W.; Zhao, B. Estimating mortality derived from indoor exposure to particles of outdoor origin. PLoS ONE 2015, 10, e0124238. [Google Scholar] [CrossRef] [PubMed]
- Xiong, R.; Jiang, W.; Li, N.; Liu, B.; He, R.; Wang, B.; Geng, Q. PM2.5-induced lung injury is attenuated in macrophage-specific NLRP3 deficient mice. Ecotoxicol. Environ. Saf. 2021, 221, 112433. [Google Scholar] [CrossRef] [PubMed]
- Yu, P.; Xu, R.; Li, S.; Coelho, M.S.Z.S.; Saldiva, P.H.N.; Sim, M.R.; Abramson, M.J.; Guo, Y. Associations between long-term exposure to PM2.5 and site-specific cancer mortality: A nationwide study in Brazil between 2010 and 2018. Environ. Pollut. 2022, 302, 119070. [Google Scholar] [CrossRef]
- Heinzerling, A.; Hsu, J.; Yip, F. Respiratory Health Effects of Ultrafine Particles in Children: A Literature Review. Water Air Soil Pollut. 2016, 227, 32. [Google Scholar] [CrossRef]
- Alapas, G. Metabolically-Derived Human Ventilation Rates: A Revised Approach Based Upon Oxygen Consumption Rates; US Environmental Protection Agency: Washington, WA, USA, 2009.
- Bai, L.; Su, X.; Zhao, D.; Zhang, Y.; Cheng, Q.; Zhang, H.; Wang, S.; Xie, M.; Su, H. Exposure to traffic-related air pollution and acute bronchitis in children: Season and age as modifiers. J. Epidemiol. Community Health 2018, 72, 426–433. [Google Scholar] [CrossRef]
- Basagaña, X.; Esnaola, M.; Rivas, I.; Amato, F.; Alvarez-Pedrerol, M.; Forns, J.; López-Vicente, M.; Pujol, J.; Nieuwenhuijsen, M.; Querol, X.; et al. Neurodevelopmental Deceleration by Urban Fine Particles from Different Emission Sources: A Longitudinal Observational Study. Environ. Health Perspect. 2016, 124, 1630–1636. [Google Scholar] [CrossRef]
- Beelen, R.; Hoek, G.; Brandt, P.A.v.d.; Goldbohm, R.A.; Fischer, P.; Schouten, L.J.; Jerrett, M.; Hughes, E.; Armstrong, B.; Brunekreef, B. Long-Term Effects of Traffic-Related Air Pollution on Mortality in a Dutch Cohort (NLCS-AIR Study). Environ. Health Perspect. 2008, 116, 196–202. [Google Scholar] [CrossRef]
- Liu, J.; Cai, W.; Zhu, S.; Dai, F. Impacts of vehicle emission from a major road on spatiotemporal variations of neighborhood particulate pollution—A case study in a university campus. Sustain. Cities Soc. 2020, 53, 101917. [Google Scholar] [CrossRef]
- Lonati, G.; Ozgen, S.; Ripamonti, G.; Signorini, S. Variability of Black Carbon and Ultrafine Particle Concentration on Urban Bike Routes in a Mid-Sized City in the Po Valley (Northern Italy). Atmosphere 2017, 8, 40. [Google Scholar] [CrossRef]
- Ahmed, S.; Adnan, M.; Janssens, D.; Wets, G. A route to school informational intervention for air pollution exposure reduction. Sustain. Cities Soc. 2020, 53, 101965. [Google Scholar] [CrossRef]
- Hinckson, E.A.; Garrett, N.; Duncan, S. Active commuting to school in New Zealand children (2004–2008): A quantitative analysis. Prev. Med. 2011, 52, 332–336. [Google Scholar] [CrossRef]
- Crawford, S.; Garrard, J. A Combined Impact-Process Evaluation of a Program Promoting Active Transport to School: Understanding the Factors That Shaped Program Effectiveness. Environ. Public Health 2013, 2013, 816961. [Google Scholar] [CrossRef]
- Briggs, D.J.; de Hoogh, K.; Morris, C.; Gulliver, J. Effects of travel mode on exposures to particulate air pollution. Environ. Int. 2008, 34, 12–22. [Google Scholar] [CrossRef]
- Gilliland, J.; Maltby, M.; Xu, X.; Luginaah, I.; Loebach, J.; Shah, T. Is active travel a breath of fresh air? Examining children’s exposure to air pollution during the school commute. Spat. Spatio-Temporal Epidemiol. 2019, 29, 51–57. [Google Scholar] [CrossRef]
- Tang, J.; McNabola, A.; Misstear, B. The potential impacts of different traffic management strategies on air pollution and public health for a more sustainable city: A modelling case study from Dublin, Ireland. Sustain. Cities Soc. 2020, 60, 102229. [Google Scholar] [CrossRef]
- Chaney, R.A.; Sloan, C.D.; Cooper, V.C.; Robinson, D.R.; Hendrickson, N.R.; Mccord, T.A.; Johnston, J.D.; Coulombe, R.A. Personal exposure to fine particulate air pollution while commuting: An examination of six transport modes on an urban arterial roadway. PLoS ONE 2017, 12, e0188053. [Google Scholar] [CrossRef]
- Hang, J.; Li, Y. Ventilation strategy and air change rates in idealized high-rise compact urban areas. Build. Environ. 2010, 45, 2754–2767. [Google Scholar] [CrossRef]
- Hang, J.; Li, Y.; Sandberg, M.; Buccolieri, R.; Di Sabatino, S. The influence of building height variability on pollutant dispersion and pedestrian ventilation in idealized high-rise urban areas. Build. Environ. 2012, 56, 346–360. [Google Scholar] [CrossRef]
- Hang, J.; Sandberg, M.; Li, Y. Age of air and air exchange efficiency in idealized city models. Build. Environ. 2009, 44, 1714–1723. [Google Scholar] [CrossRef]
- Kato, S.; Ito, K.; Murakami, S. Analysis of visitation frequency through particle tracking method based on LES and model experiment. Indoor Air 2003, 13, 182–193. [Google Scholar] [CrossRef]
- Li, X.-X.; Liu, C.-H.; Leung, D.Y.C. Numerical investigation of pollutant transport characteristics inside deep urban street canyons. Atmos. Environ. 2009, 43, 2410–2418. [Google Scholar] [CrossRef]
- Lim, E.; Ito, K.; Sandberg, M. New ventilation index for evaluating imperfect mixing conditions–Analysis of Net Escape Velocity based on RANS approach. Build. Environ. 2013, 61, 45–56. [Google Scholar] [CrossRef]
- Meroney, R.N.; Pavageau, M.; Rafailidis, S.; Schatzmann, M. Study of line source characteristics for 2-D physical modelling of pollutant dispersion in street canyons. J. Wind Eng. Ind. Aerodyn. 1996, 62, 37–56. [Google Scholar] [CrossRef]
- Mirzaei, P.A.; Haghighat, F. Pollution removal effectiveness of the pedestrian ventilation system. J. Wind Eng. Ind. Aerodyn. 2011, 99, 46–58. [Google Scholar] [CrossRef]
- Oke, T.R. Street design and urban canopy layer climate. Energy Build. 1988, 11, 103–113. [Google Scholar] [CrossRef]
- Li, Q.; Liang, J.; Wang, Q.; Chen, Y.; Yang, H.; Ling, H.; Luo, Z.; Hang, J. Numerical Investigations of Urban Pollutant Dispersion and Building Intake Fraction with Various 3D Building Configurations and Tree Plantings. Int. J. Environ. Res. Public Health 2022, 19, 3524. [Google Scholar] [CrossRef]
- Chang, C.-H.; Meroney, R.N. Concentration and flow distributions in urban street canyons: Wind tunnel and computational data. J. Wind Eng. Ind. Aerodyn. 2003, 91, 1141–1154. [Google Scholar] [CrossRef]
- Chew, L.W.; Aliabadi, A.A.; Norford, L.K. Flows across high aspect ratio street canyons: Reynolds number independence revisited. Environ. Fluid Mech. 2018, 18, 1275–1291. [Google Scholar] [CrossRef]
- Li, X.-X.; Liu, C.-H.; Leung, D.Y.C.; Lam, K.M. Recent progress in CFD modelling of wind field and pollutant transport in street canyons. Atmos. Environ. 2006, 40, 5640–5658. [Google Scholar] [CrossRef]
- Tominaga, Y.; Stathopoulos, T. CFD simulation of near-field pollutant dispersion in the urban environment: A review of current modeling techniques. Atmos. Environ. 2013, 79, 716–730. [Google Scholar] [CrossRef]
- Bady, M.; Kato, S.; Huang, H. Towards the application of indoor ventilation efficiency indices to evaluate the air quality of urban areas. Build. Environ. 2008, 43, 1991–2004. [Google Scholar] [CrossRef]
- Viotti, P.; Liuti, G.; Di Genova, P. Atmospheric urban pollution: Applications of an artificial neural network (ANN) to the city of Perugia. Ecol. Model. 2002, 148, 27–46. [Google Scholar] [CrossRef]
- Blocken, B. 50 years of Computational Wind Engineering: Past, present and future. J. Wind Eng. Ind. Aerodyn. 2014, 129, 69–102. [Google Scholar] [CrossRef]
- Liu, J.; Heidarinejad, M.; Pitchurov, G.; Zhang, L.; Srebric, J. An extensive comparison of modified zero-equation, standard k-ε, and LES models in predicting urban airflow. Sustain. Cities Soc. 2018, 40, 28–43. [Google Scholar] [CrossRef]
- Gao, Z.; Bresson, R.; Qu, Y.; Milliez, M.; de Munck, C.; Carissimo, B. High resolution unsteady RANS simulation of wind, thermal effects and pollution dispersion for studying urban renewal scenarios in a neighborhood of Toulouse. Urban Clim. 2018, 23, 114–130. [Google Scholar] [CrossRef]
- Wang, W.; Ng, E. Air ventilation assessment under unstable atmospheric stratification—A comparative study for Hong Kong. Build. Environ. 2018, 130, 1–13. [Google Scholar] [CrossRef]
- Srebric, J.; Heidarinejad, M.; Liu, J. Building neighborhood emerging properties and their impacts on multi-scale modeling of building energy and airflows. Build. Environ. 2015, 91, 246–262. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, X.; Niu, J.; Tse, K.T. Pedestrian-level wind and gust around buildings with a ‘lift-up’ design: Assessment of influence from surrounding buildings by adopting LES. Build. Simul. 2019, 12, 1107–1118. [Google Scholar] [CrossRef]
- Yang, H.; Lam, C.K.C.; Lin, Y.; Chen, L.; Mattsson, M.; Sandberg, M.; Hayati, A.; Claesson, L.; Hang, J. Numerical investigations of Re-independence and influence of wall heating on flow characteristics and ventilation in full-scale 2D street canyons. Build. Environ. 2021, 189, 107510. [Google Scholar] [CrossRef]
- Liu, J.; Heidarinejad, M.; Nikkho, S.K.; Mattise, N.W.; Srebric, J. Quantifying Impacts of Urban Microclimate on a Building Energy Consumption—A Case Study. Sustainability 2019, 11, 4921. [Google Scholar] [CrossRef]
- Blocken, B. LES over RANS in building simulation for outdoor and indoor applications: A foregone conclusion? Build. Simul. 2018, 11, 821–870. [Google Scholar] [CrossRef]
- Liu, J.; Srebric, J.; Yu, N. Numerical simulation of convective heat transfer coefficients at the external surfaces of building arrays immersed in a turbulent boundary layer. Int. J. Heat Mass Transf. 2013, 61, 209–225. [Google Scholar] [CrossRef]
- Liu, J.; Heidarinejad, M.; Gracik, S.; Srebric, J. The impact of exterior surface convective heat transfer coefficients on the building energy consumption in urban neighborhoods with different plan area densities. Energy Build. 2015, 86, 449–463. [Google Scholar] [CrossRef]
- Cui, D.; Hu, G.; Ai, Z.; Du, Y.; Mak, C.M.; Kwok, K. Particle image velocimetry measurement and CFD simulation of pedestrian level wind environment around U-type street canyon. Build. Environ. 2019, 154, 239–251. [Google Scholar] [CrossRef]
- Panagiotou, I.; Neophytou, M.K.A.; Hamlyn, D.; Britter, R.E. City breathability as quantified by the exchange velocity and its spatial variation in real inhomogeneous urban geometries: An example from central London urban area. Sci. Total Environ. 2013, 442, 466–477. [Google Scholar] [CrossRef]
- Wang, W.; Xu, Y.; Ng, E.; Raasch, S. Evaluation of satellite-derived building height extraction by CFD simulations: A case study of neighborhood-scale ventilation in Hong Kong. Landsc. Urban Plan. 2018, 170, 90–102. [Google Scholar] [CrossRef]
- Van Hooff, T.; Blocken, B. On the effect of wind direction and urban surroundings on natural ventilation of a large semi-enclosed stadium. Comput. Fluids 2010, 39, 1146–1155. [Google Scholar] [CrossRef]
- Montazeri, H.; Blocken, B.; Janssen, W.D.; van Hooff, T. CFD evaluation of new second-skin facade concept for wind comfort on building balconies: Case study for the Park Tower in Antwerp. Build. Environ. 2013, 68, 179–192. [Google Scholar] [CrossRef]
- Toparlar, Y.; Blocken, B.; Vos, P.; van Heijst, G.J.F.; Janssen, W.D.; van Hooff, T.; Montazeri, H.; Timmermans, H.J.P. CFD simulation and validation of urban microclimate: A case study for Bergpolder Zuid, Rotterdam. Build. Environ. 2015, 83, 79–90. [Google Scholar] [CrossRef]
- Li, J.; Liu, J.; Srebric, J.; Hu, Y.; Liu, M.; Su, L.; Wang, S. The Effect of Tree-Planting Patterns on the Microclimate within a Courtyard. Sustainability 2019, 11, 1665. [Google Scholar] [CrossRef]
- Zhang, K.; Chen, G.; Zhang, Y.; Liu, S.; Wang, X.; Wang, B.; Hang, J. Integrated impacts of turbulent mixing and NOX-O3 photochemistry on reactive pollutant dispersion and intake fraction in shallow and deep street canyons. Sci. Total Environ. 2020, 712, 135553. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.; Hang, J.; Sandberg, M.; Claesson, L.; Di Sabatino, S.; Wigo, H. The impacts of building height variations and building packing densities on flow adjustment and city breathability in idealized urban models. Build. Environ. 2017, 118, 344–361. [Google Scholar] [CrossRef]
- Lin, Y.; Chen, G.; Chen, T.; Luo, Z.; Yuan, C.; Gao, P.; Hang, J. The influence of advertisement boards, street and source layouts on CO dispersion and building intake fraction in three-dimensional urban-like models. Build. Environ. 2019, 150, 297–321. [Google Scholar] [CrossRef]
- Lin, B.; Li, X.; Zhu, Y.; Qin, Y. Numerical simulation studies of the different vegetation patterns’ effects on outdoor pedestrian thermal comfort. J. Wind Eng. Ind. Aerodyn. 2008, 96, 1707–1718. [Google Scholar] [CrossRef]
- Qin, H.; Hong, B.; Jiang, R.; Yan, S.; Zhou, Y. The Effect of Vegetation Enhancement on Particulate Pollution Reduction: CFD Simulations in an Urban Park. Forests 2019, 10, 373. [Google Scholar] [CrossRef]
- Green, S.R. Modelling Turbulent Air Flow in a Stand of Widely-Spaced Trees. PHOENICS J. Comput. Fluid Dyn. Its Appl. 1992, 5, 294–312. [Google Scholar]
- Ji, W.; Zhao, B. Numerical study of the effects of trees on outdoor particle concentration distributions. Build. Simul.-China 2014, 7, 417–427. [Google Scholar] [CrossRef]
- Nowak, D.J.; Hirabayashi, S.; Bodine, A.; Hoehn, R. Modeled PM2.5 removal by trees in ten U.S. cities and associated health effects. Environ. Pollut. 2013, 178, 395–402. [Google Scholar] [CrossRef]
- Sha, C.; Wang, X.; Lin, Y.; Fan, Y.; Chen, X.; Hang, J. The impact of urban open space and ‘lift-up’ building design on building intake fraction and daily pollutant exposure in idealized urban models. Sci. Total Environ. 2018, 633, 1314–1328. [Google Scholar] [CrossRef]
- Tominaga, Y.; Mochida, A.; Yoshie, R.; Kataoka, H.; Nozu, T.; Yoshikawa, M.; Shirasawa, T. AIJ guidelines for practical applications of CFD to pedestrian wind environment around buildings. J. Wind Eng. Ind. Aerodyn. 2008, 96, 1749–1761. [Google Scholar] [CrossRef]
- Su, M.; Liu, J.; Zhou, S.; Miao, J.; Kim, M.K. Dynamic prediction of the pre-dehumidification of a radiant floor cooling and displacement ventilation system based on computational fluid dynamics and a back-propagation neural network: A case study of an office room. Indoor Built Environ. 2022; in press. [Google Scholar] [CrossRef]
- Kim, M.K.; Cremers, B.; Liu, J.; Zhang, J.; Wang, J. Prediction and correlation analysis of ventilation performance in a residential building using artificial neural network models based on data-driven analysis. Sustain. Cities Soc. 2022, 83, 103981. [Google Scholar] [CrossRef]
- Tasadduq, I.; Rehman, S.; Bubshait, K. Application of neural networks for the prediction of hourly mean surface temperatures in Saudi Arabia. Renew. Energy 2002, 25, 545–554. [Google Scholar] [CrossRef]
- Ren, L.; Liu, Y.; Rui, Z.; Li, H.; Feng, R. Application of Elman Neural Network and MATLAB to Load Forecasting. In Proceedings of the 2009 International Conference on Information Technology and Computer Science, Kiev, Ukraine, 25–26 July 2009; pp. 55–59. [Google Scholar]
- Mohanraj, M.; Jayaraj, S.; Muraleedharan, C. Applications of artificial neural networks for refrigeration, air-conditioning and heat pump systems—A review. Renew. Sustain. Energy Rev. 2012, 16, 1340–1358. [Google Scholar] [CrossRef]
- Nasruddin; Sholahudin; Satrio, P.; Mahlia, T.M.I.; Giannetti, N.; Saito, K. Optimization of HVAC system energy consumption in a building using artificial neural network and multi-objective genetic algorithm. Sustain. Energy Technol. Assess. 2019, 35, 48–57. [Google Scholar] [CrossRef]
- Qi, A. Research on Prediction Model of Improved BP Neural Network Optimized by Genetic Algorithm. In Proceedings of the 2017 4th International Conference on Machinery, Materials and Computer (MACMC 2017), Xi’an, China, 27–29 November 2017; pp. 764–767. [Google Scholar]
- Hinds, W.C.; Zhu, Y. Aerosol Technology: Properties, Behavior, and Measurement of Airborne Particles; John Wiley & Sons: New York, NJ, USA, 1982. [Google Scholar]
- Kwiecień, J.; Szopińska, K. Mapping Carbon Monoxide Pollution of Residential Areas in a Polish City. Remote Sens. 2020, 12, 2885. [Google Scholar] [CrossRef]
- Gu, Z.-L.; Zhang, Y.-W.; Cheng, Y.; Lee, S.-C. Effect of uneven building layout on air flow and pollutant dispersion in non-uniform street canyons. Build. Environ. 2011, 46, 2657–2665. [Google Scholar] [CrossRef]
- Fenger, J. Urban air quality. Atmos. Environ. 1999, 33, 4877–4900. [Google Scholar] [CrossRef]
- Chan, C.K.; Yao, X. Air pollution in mega cities in China. Atmos. Environ. 2008, 42, 1–42. [Google Scholar] [CrossRef]
- An, F.; Liu, J.; Lu, W.; Jareemit, D. Comparison of exposure to traffic-related pollutants on different commuting routes to a primary school in Jinan, China. Environ. Sci. Pollut. Res. Int. 2022, 29, 43319–43340. [Google Scholar] [CrossRef]
- Kumar, P.; Rivas, I.; Sachdeva, L. Exposure of in-pram babies to airborne particles during morning drop-in and afternoon pick-up of school children. Environ. Pollut. 2017, 224, 407–420. [Google Scholar] [CrossRef]
- Garcia-Algar, O.; Canchucaja, L.; d’Orazzio, V.; Manich, A.; Joya, X.; Vall, O. Different exposure of infants and adults to ultrafine particles in the urban area of Barcelona. Environ. Monit. Assess. 2014, 187, 4196. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FAR | Cback (μg/m3) | VEL (m/s) | VDR (θ + 180°) | LAD | Ccar (μg/m3) |
|---|---|---|---|---|---|
| I | 12.10 | 1, 3, 5, 7 | 180°, 195°, 210°, 225° | 0.25 | 90.75 |
| 36.30 | 1, 3, 5, 7 | 180°, 195°, 210°, 225° | 1.00 | 121.00 | |
| 60.50 | 1, 3, 5, 7 | 180°, 195°, 210°, 225° | 4.00 | 151.25 | |
| II | 12.10 | 1, 3, 5, 7 | 180°, 195°, 210°, 225° | 0.25 | 90.75 |
| 36.30 | 1, 3, 5, 7 | 180°, 195°, 210°, 225° | 1.00 | 121.00 | |
| 60.50 | 1, 3, 5, 7 | 180°, 195°, 210°, 225° | 4.00 | 151.25 | |
| III | 12.10 | 1, 3, 5, 7 | 180°, 195°, 210°, 225° | 0.25 | 90.75 |
| 36.30 | 1, 3, 5, 7 | 180°, 195°, 210°, 225° | 1.00 | 121.00 | |
| 60.50 | 1, 3, 5, 7 | 180°, 195°, 210°, 225° | 4.00 | 151.25 |
| Number of Cells in x, y, and z Directions | Relative Difference in the TRAP Concentration | |
|---|---|---|
| Coarse grid | 88 × 88 × 58 | |
| Medium grid | 105 × 105 × 68 | 2.5% |
| Fine grid | 126 × 126 × 82 | 1.1% |
| FAR | Cback (μg/m3) | VEL (m/s) | VDR | LAD | Ccar (μg/m3) | CTRAP (μg/m3) | RDD (μg/min) |
|---|---|---|---|---|---|---|---|
| I | 60.50 | 1 | 225° | 4.00 | 36.30 | 25.30 | 0.60 |
| 60.50 | 1 | 225° | 4.00 | 60.50 | 24.30 | 0.58 | |
| 60.50 | 1 | 225° | 4.00 | 90.75 | 28.18 | 0.67 | |
| 60.50 | 1 | 225° | 4.00 | 121.00 | 34.92 | 0.83 | |
| 60.50 | 1 | 225° | 4.00 | 151.25 | 30.97 | 0.74 | |
| 60.50 | 1 | 195° | 4.00 | 36.30 | 40.89 | 0.97 | |
| 60.50 | 1 | 195° | 4.00 | 60.50 | 38.81 | 0.92 | |
| 60.50 | 1 | 195° | 4.00 | 90.75 | 47.05 | 1.12 | |
| 60.50 | 1 | 195° | 4.00 | 121.00 | 51.77 | 1.23 | |
| 60.50 | 1 | 195° | 4.00 | 151.25 | 49.13 | 1.17 | |
| 60.50 | 1 | 180° | 4.00 | 36.30 | 37.31 | 0.89 | |
| 60.50 | 1 | 180° | 4.00 | 60.50 | 40.81 | 0.97 | |
| 60.50 | 1 | 180° | 4.00 | 90.75 | 43.14 | 1.03 | |
| 60.50 | 1 | 180° | 4.00 | 121.00 | 46.60 | 1.11 | |
| 60.50 | 1 | 180° | 4.00 | 151.25 | 53.35 | 1.27 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, L.; An, F.; Su, M.; Liu, J. Exposure Assessment of Traffic-Related Air Pollution Based on CFD and BP Neural Network and Artificial Intelligence Prediction of Optimal Route in an Urban Area. Buildings 2022, 12, 1227. https://0-doi-org.brum.beds.ac.uk/10.3390/buildings12081227
Ren L, An F, Su M, Liu J. Exposure Assessment of Traffic-Related Air Pollution Based on CFD and BP Neural Network and Artificial Intelligence Prediction of Optimal Route in an Urban Area. Buildings. 2022; 12(8):1227. https://0-doi-org.brum.beds.ac.uk/10.3390/buildings12081227
Chicago/Turabian StyleRen, Lulu, Farun An, Meng Su, and Jiying Liu. 2022. "Exposure Assessment of Traffic-Related Air Pollution Based on CFD and BP Neural Network and Artificial Intelligence Prediction of Optimal Route in an Urban Area" Buildings 12, no. 8: 1227. https://0-doi-org.brum.beds.ac.uk/10.3390/buildings12081227