
Model-Based Condition-Monitoring and Jamming-Tolerant Control of an Electro-Mechanical Flight Actuator with Differential Ball Screws


Abstract
:1. Introduction
1.1. Research Context
1.2. Motivations of the Research
2. Materials and Methods
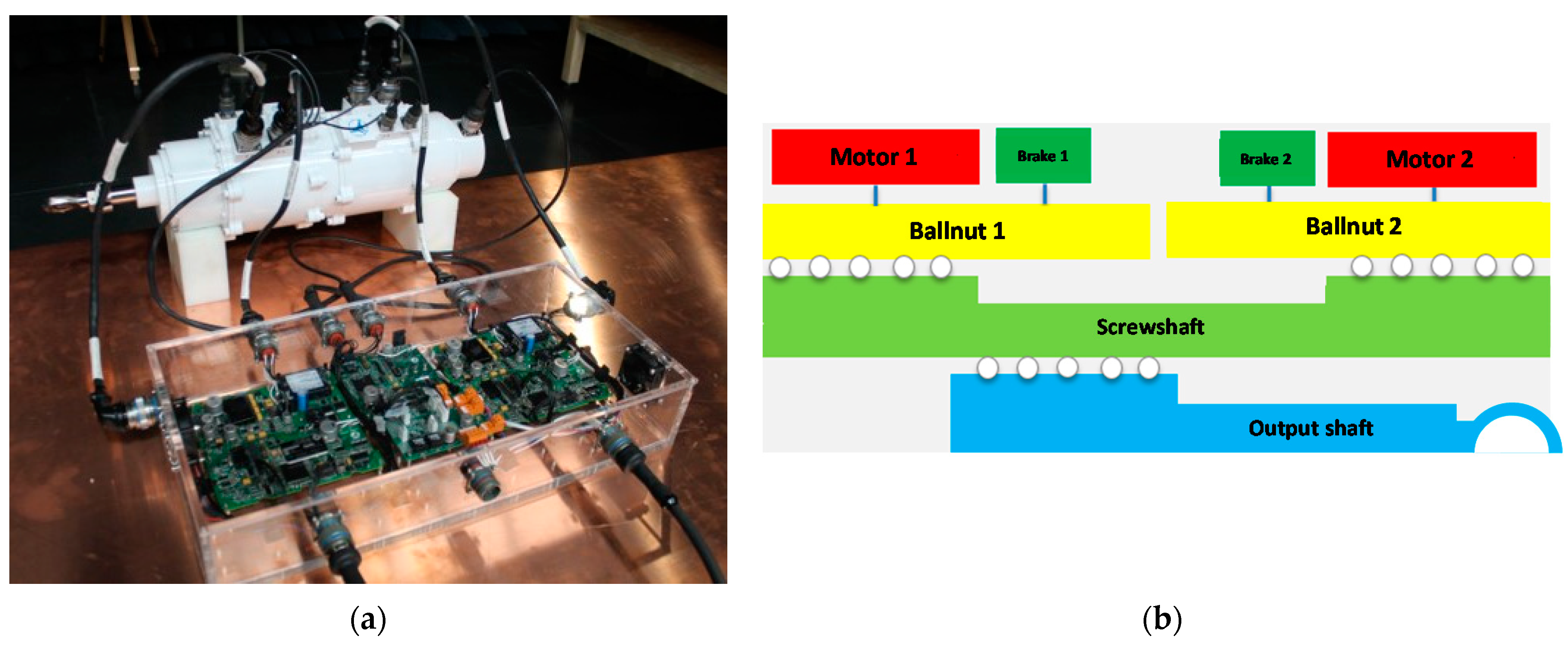
2.1. System Architecture
- dual redundant three-phase Permanent Magnets Synchronous Machines (PMSMs) with surface-mounted magnets and sinusoidal back-electromotive forces, driven via Field-Oriented Control (FOC) technique;
- dual Electronic Control Units (ECUs), implementing the condition-monitoring algorithms and the closed-loop control functions, based on three nested loops on motors currents, motors speeds and output shaft position;
- Umgragroup-patented jamming-tolerant mechanical transmission with differential ball-screws (Figure 1b).
2.2. Mechanical Transmission
2.3. Electronic Control Unit and Sensors
- n. 12 current sensors (CSx, with x = a, b, c), two ones per each phase of the motors;
- n. 4 resolvers (RES), two ones per each motor;
- n. 2 Linear Variable Differential Transformers (LVDT), measuring the output shaft position;
- n. 2 cone-type proximity sensors (CTP), monitoring the screwshaft translation;
- n. 4 temperature sensors, monitoring the heating of motors (MTS) and the heating of the inverters (ITS).
- the i-th Flight Control Computer (FCC), via RS422 communication;
- the CONi board, via Serial Peripheral Interface (SPI) bus;
- the other monitor board, via dual redundant CAN bus;
- one of the two resolvers of the i-th motor, via SPI bus;
- one of the two LVDTs, via SPI bus;
- one of the two set of current sensors of the i-th motor;
- the brake of the i-th motor, via General Purpose Input/Output interface;
- one of the two cone-type proximity sensor;
- one of the two motor temperature sensors;
- one of the two inverter temperature sensors.
- the MONi board, via SPI bus;
- the other control board, via CAN bus;
- one of the two resolvers of the i-th motor, via SPI bus;
- one of the two set of current sensors of the i-th motor.
2.4. Condition-Monitoring System
- Motion Monitor;
- Currents Monitor;
- Jamming Monitor.
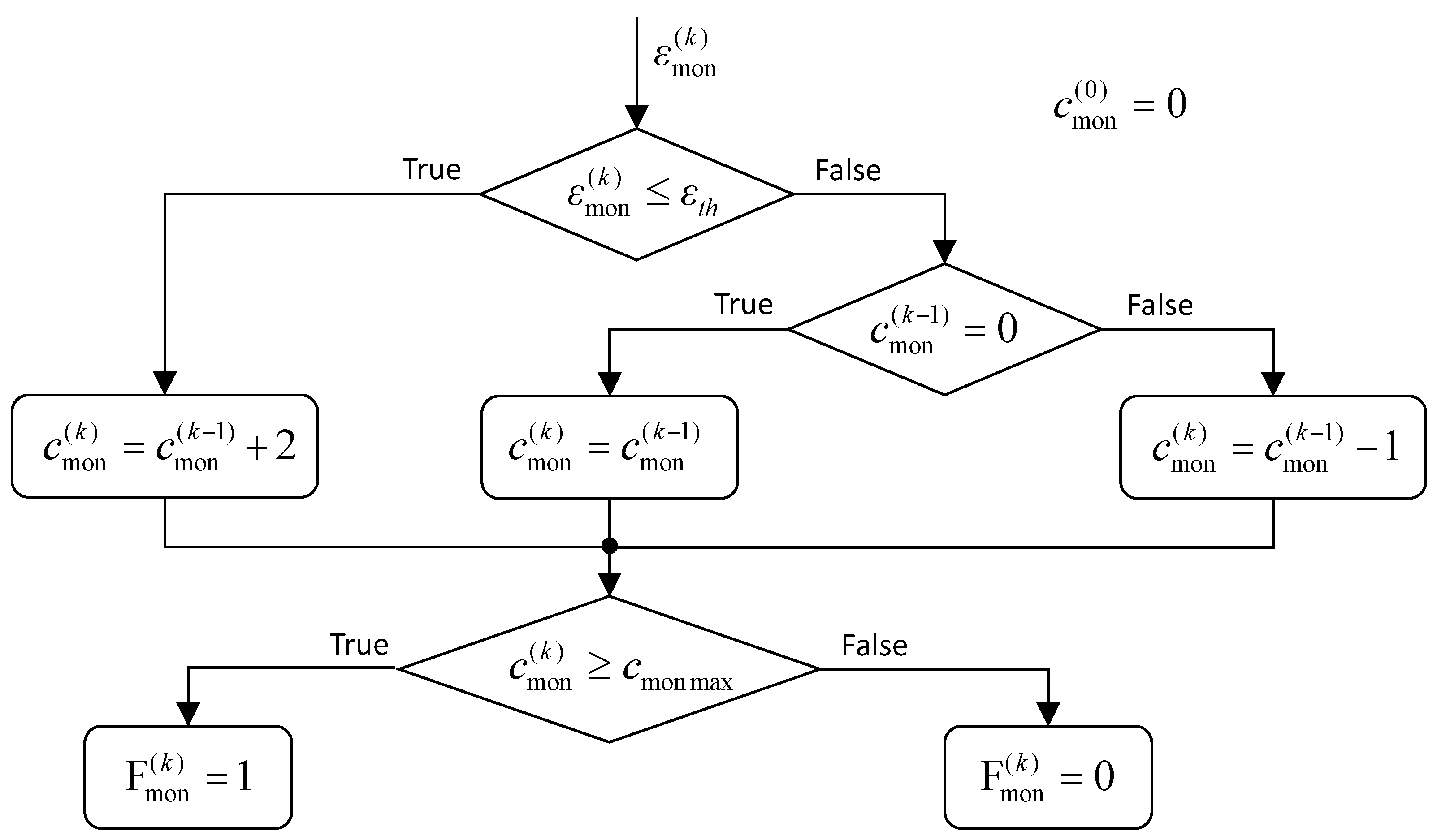
2.4.1. Motion Monitor
2.4.2. Currents Monitor
- if all sums of currents do not exceed a predefined threshold, no fault is detected;
- if the threshold is exceeded by all the sums of currents belonging to a group, a fault of the sensor providing the common measurement is detected;
- if the threshold is exceeded by all the sums of currents included in a class, a fault of the common coil included in the class is detected.
2.4.3. Jamming Monitor
- reconstructing, via Equation (3), an output speed estimate () from the motor angle feedbacks, and an output speed demand () from the motors speed demands;
- performing a threshold check on an output speed residual (), calculated via Equation (14).
- 100 ms for the screwshaft jamming faults;
- 20 ms for the motors jamming, to account for additional delays due to the brake activation and engagement.
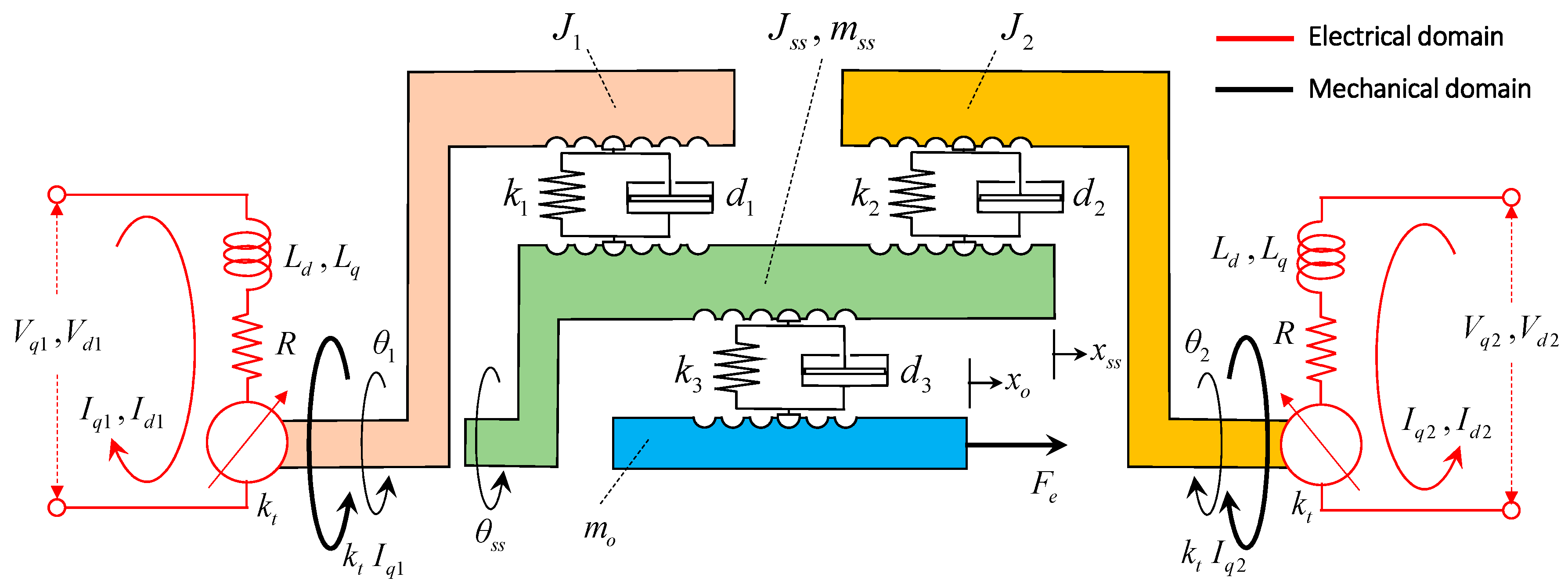
2.5. Nonlinear Dynamic Modelling
- an electromechanical section, simulating
- ○
- ○
- 5-degree-of-freedom mechanical transmission, with equations of motions related to motors rotation, output translation and screwshaft rotation and translation;
- ○
- ○
- ○
- jamming faults, implying the sudden block of motors rotation, screwshaft rotation or screwshaft translation;
- an electronic section, including
- ○
- sensors errors and nonlinearities (bias, noise, resolution);
- ○
- commands nonlinearities (saturation, rate limiting);
- ○
- digital signal processing at 2 kHz sampling rate for both monitoring (Table 5) and closed-loop control functions.
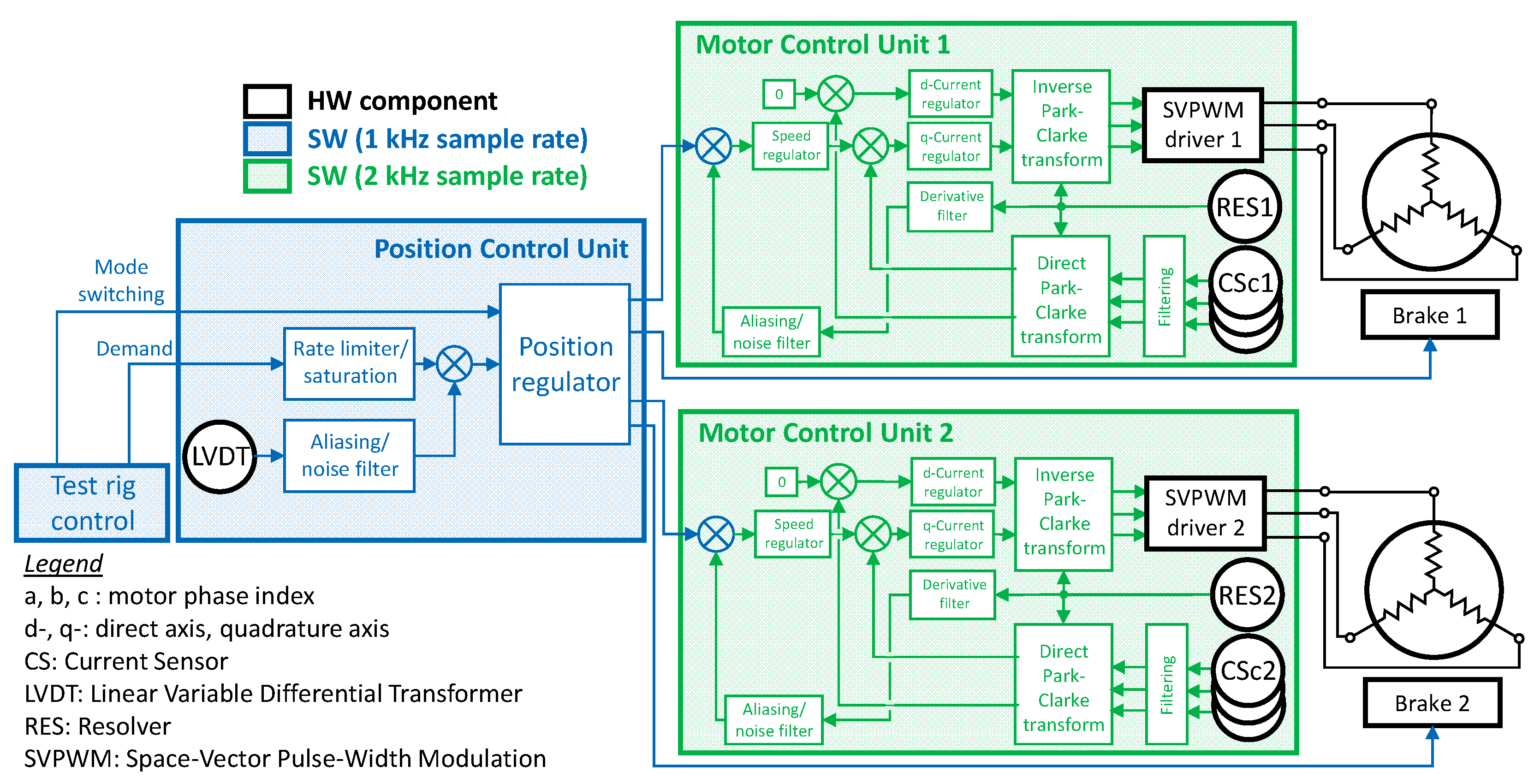
2.6. ECU Prototype for Experimental Tests
- all the regulators implement proportional/integral actions on tracking error signals, plus anti-windup function with back-calculation algorithm [55] to compensate for commands saturation;
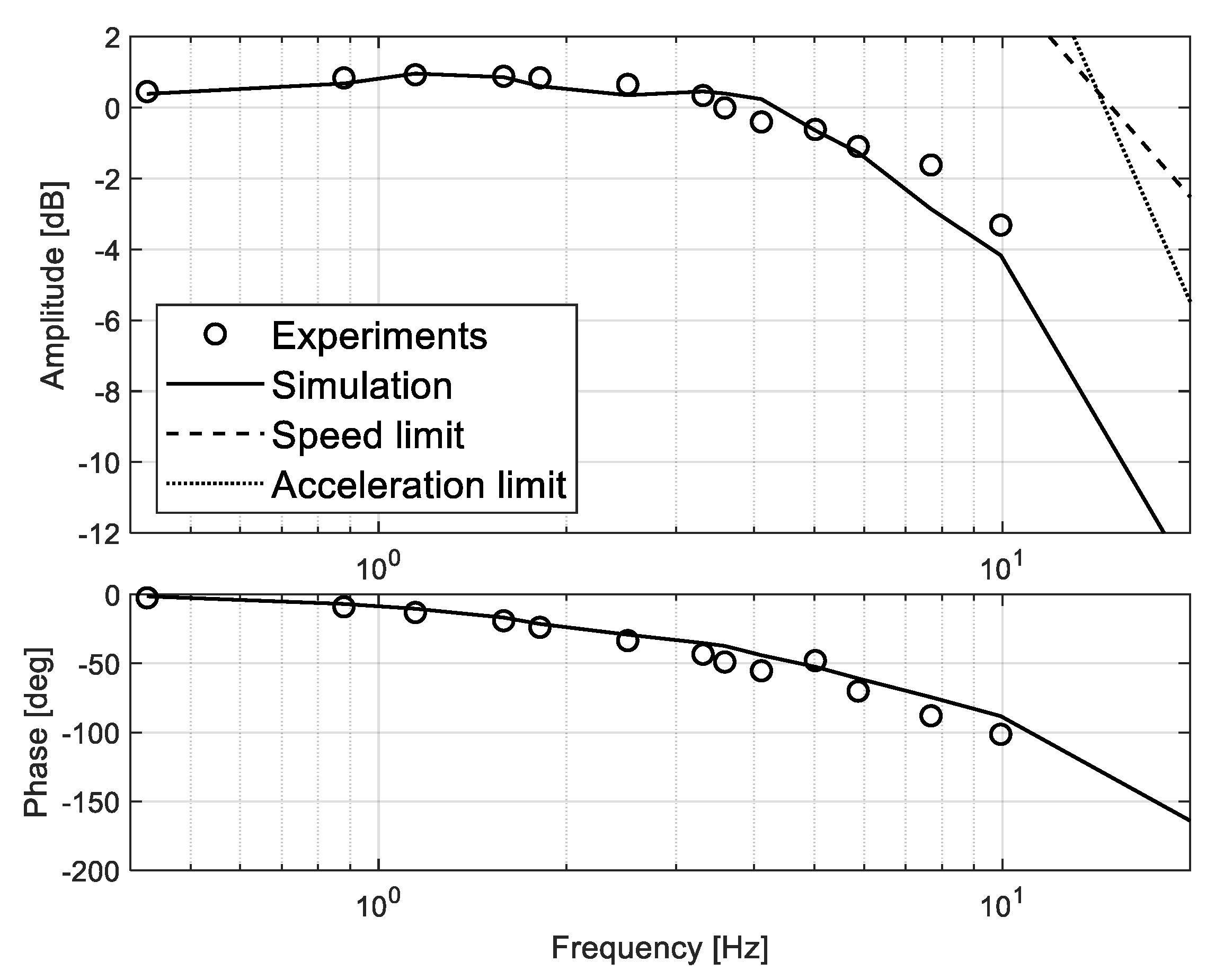
- the innermost loops on motors currents and motors speeds are processed at 2 kHz and use fixed parameters (i.e., they don’t vary with EMA mode). They provide tracking bandwidths of 420 Hz and 58 Hz, on currents and speeds, respectively;
- the reconfiguration strategy is applied to the outermost loop only, which is processed at 1 kHz (due to a prototype ECU limitation) and it can be reconfigured through a dedicated mode switching signal.
3. Results and Discussion
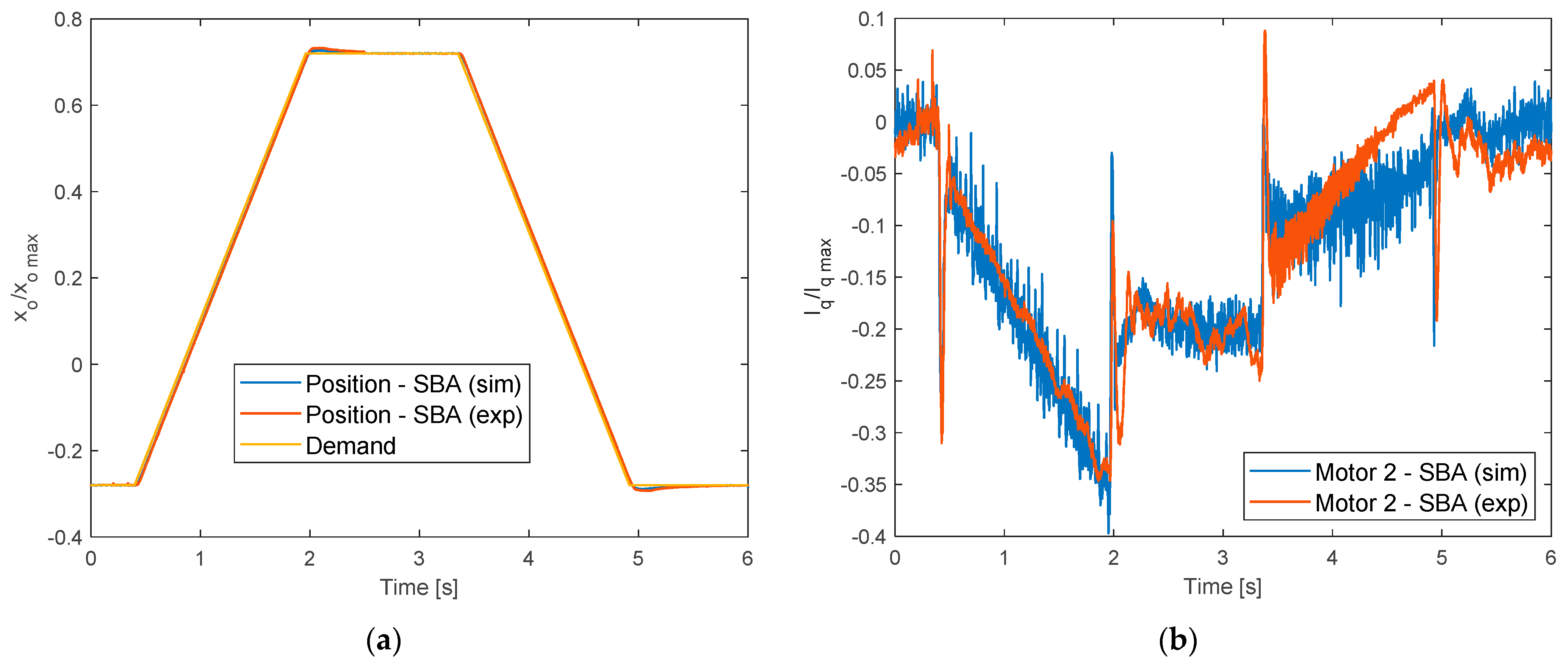
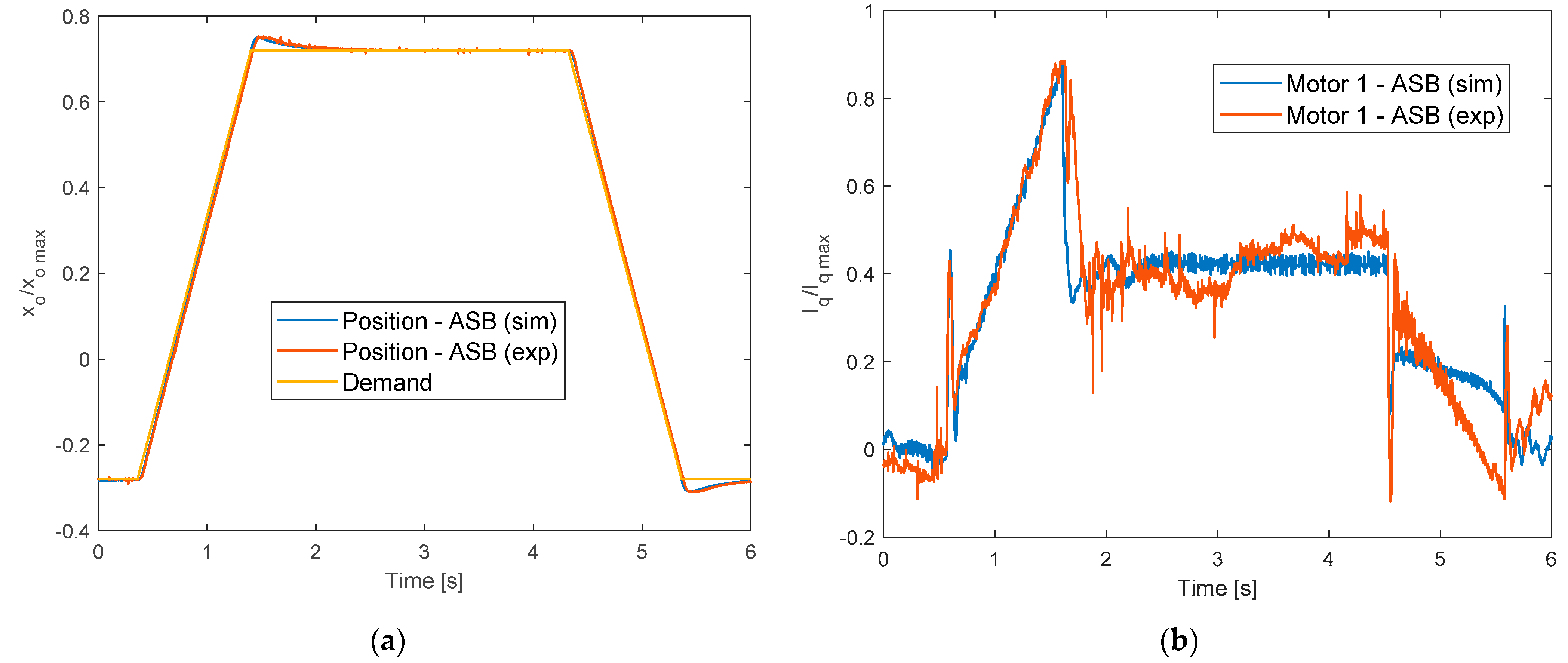
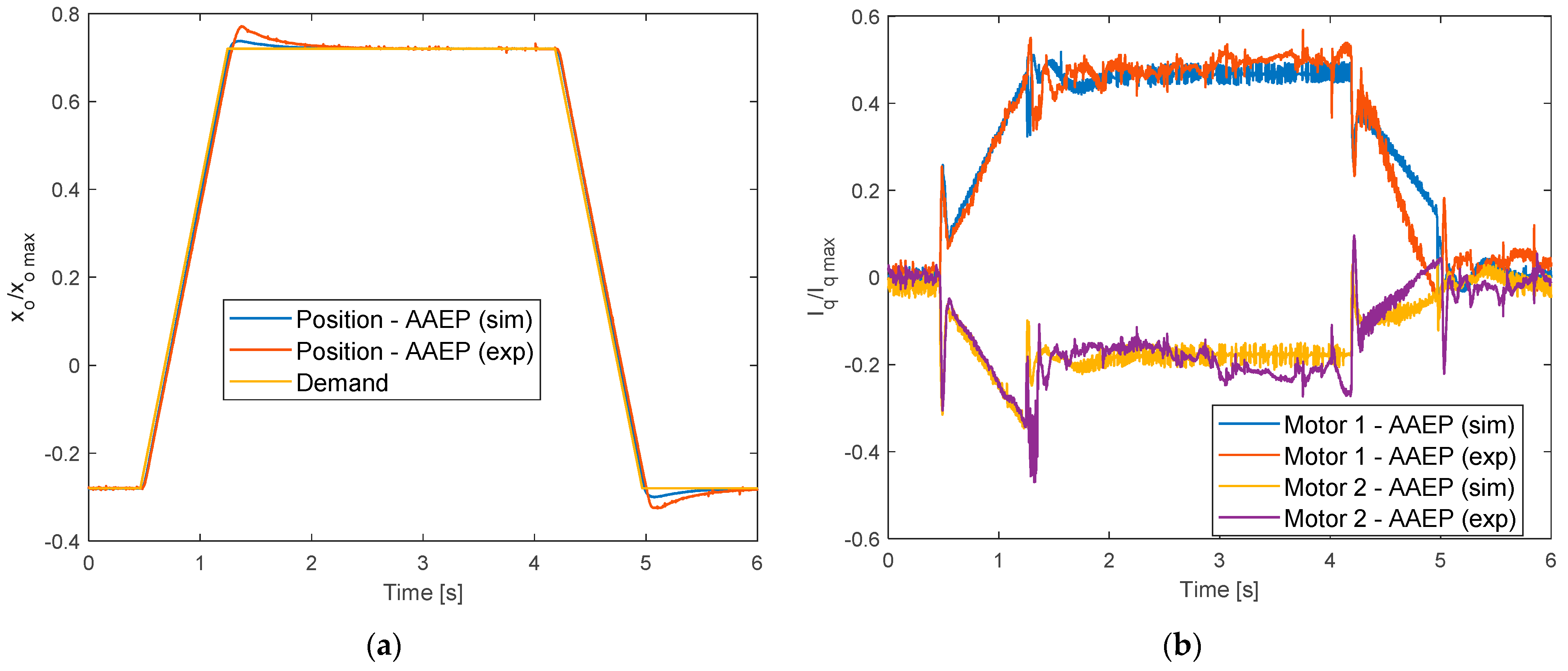
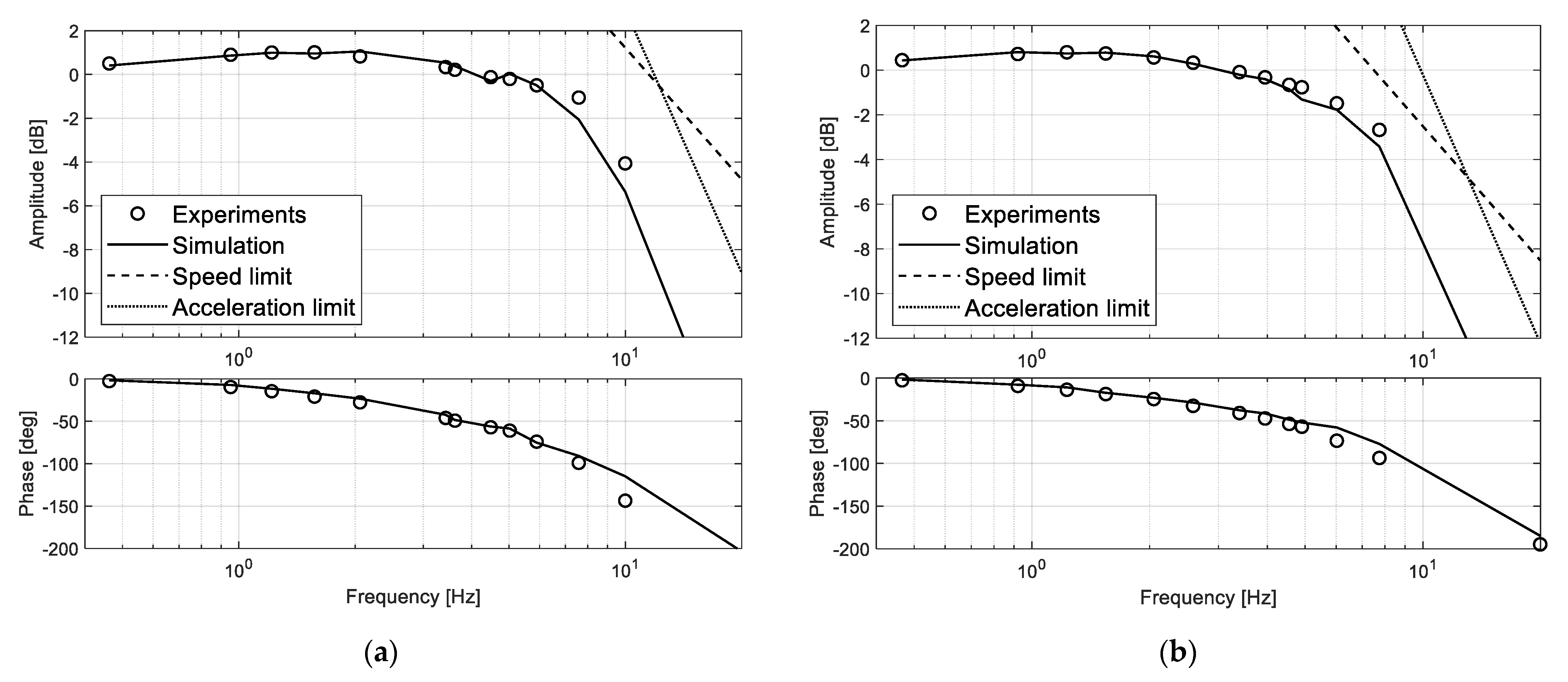
3.1. Experimental Validation of the Model
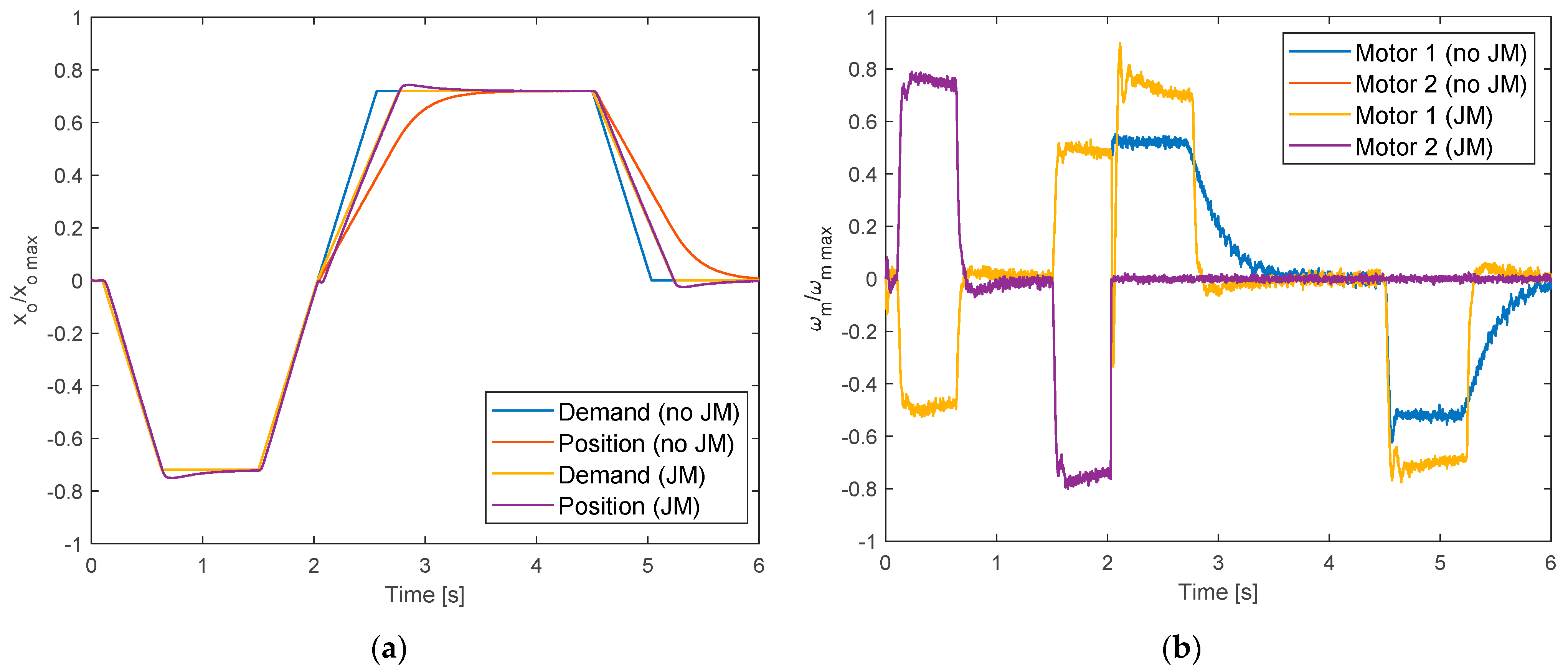
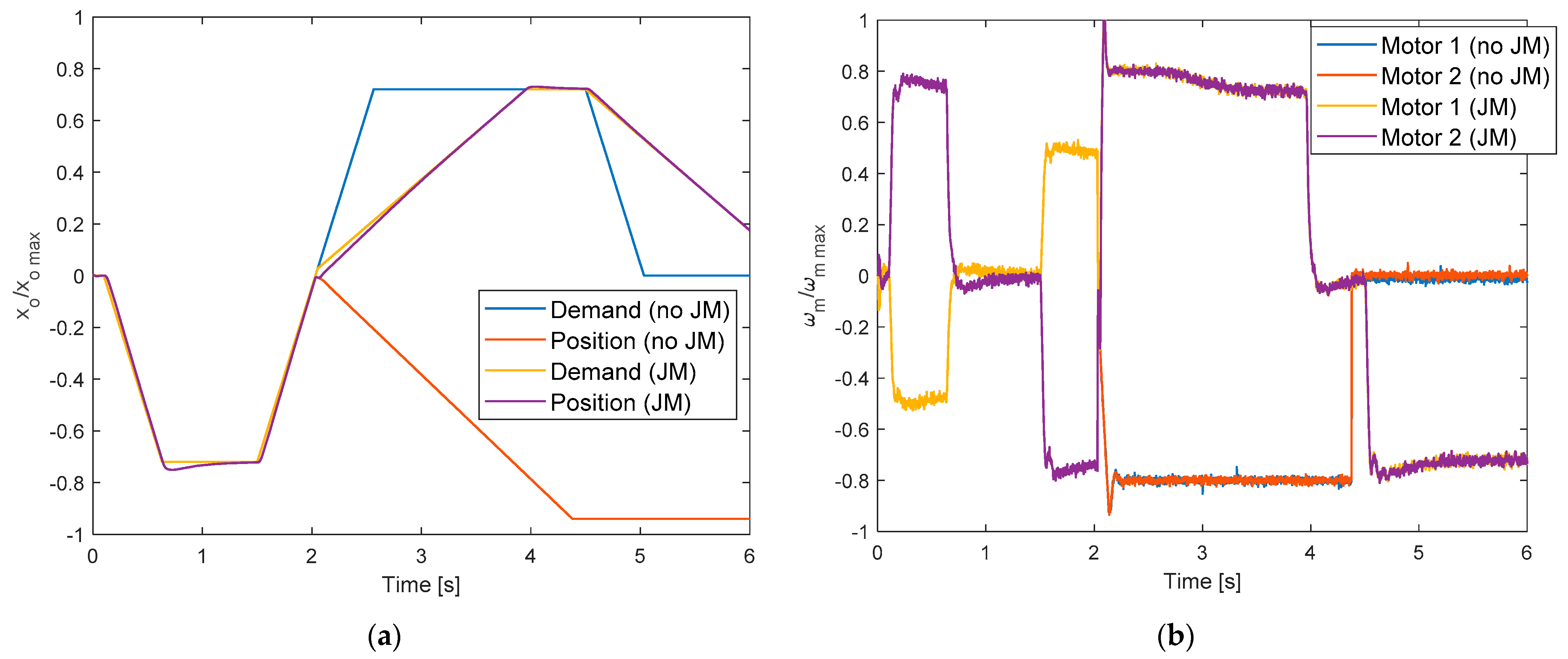
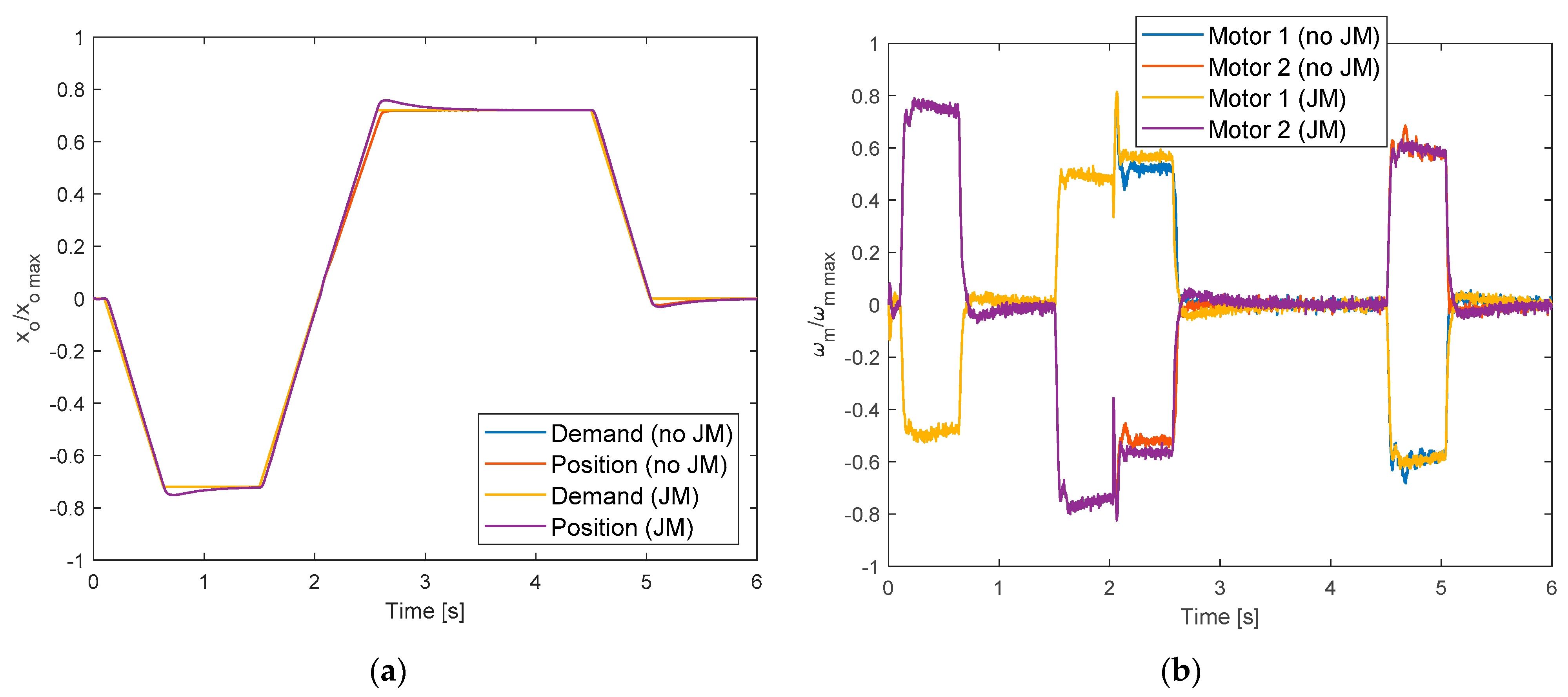
3.2. Jamming Failure Transient Characterisation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Flightpath 2050: Europe’s Vision for Aviation. Available online: https://op.europa.eu/en/publication-detail/-/publication/7d834950-1f5e-480f-ab70-ab96e4a0a0ad/language-en (accessed on 25 August 2021).
- Schäfer, A.W.; Barrett, S.R.H.; Doyme, K.; Dray, L.; Gnadt, A.R.; Self, R.; O’Sullivan, A.; Synodinos, A.; Torija, A.J. Technological, economic and environmental prospects of all-electric aircraft. Nat. Energy 2019, 4, 160–166. [Google Scholar] [CrossRef] [Green Version]
- Howse, M. All-electric aircraft. Power Eng. J. 2003, 17, 35–37. [Google Scholar] [CrossRef]
- Rosero, J.A.; Ortega, J.A.; Aldabas, E.; Romeral, L. Moving towards a more electric aircraft. IEEE Aerosp. Electron. Syst. Mag. 2007, 22, 3–9. [Google Scholar] [CrossRef] [Green Version]
- Roboam, X.; Sareni, B.; De Andrade, A. More Electricity in the Air: Toward Optimized Electrical Networks Embedded in More-Electrical Aircraft. IEEE Ind. Electron. Mag. 2012, 6, 6–17. [Google Scholar] [CrossRef] [Green Version]
- Madonna, V.; Giangrande, P.; Galea, M. Electrical Power Generation in Aircraft: Review, Challenges, and Opportunities. IEEE Trans. Transp. Electrif. 2018, 4, 646–659. [Google Scholar] [CrossRef]
- Botten, S.L.; Whitley, C.R.; King, A.D. Flight Control Actuation Technology for Next-Generation All-Electric Aircraft. Technol. Rev. J. 2000, 8, 55–68. [Google Scholar]
- Maré, J.-C.; Fu, J. Review on signal-by-wire and power-by-wire actuation for more electric aircraft. Chin. J. Aeronaut. 2017, 30, 857–870. [Google Scholar] [CrossRef]
- Mazzoleni, M.; Di Rito, G.; Previdi, F. Introduction. In Electro-Mechanical Actuators for the More Electric Aircraft; Advances in Industrial Control; Springer: Cham, Switzerland, 2021; Volume 2, pp. 1–44. [Google Scholar] [CrossRef]
- Jensen, S.C.; Jenney, G.D.; Dawson, D. Flight test experience with an electromechanical actuator on the F-18 Systems Research Aircraft. In Proceedings of the 19th Digital Avionics Systems Conference, Philadelphia, PA, USA, 7–13 October 2000; Volume 1, pp. 2E3/1–2E3/10. [Google Scholar] [CrossRef]
- Maré, J.-C. Aerospace Actuators—Volume 2: Signal-by-Wire and Power-by-Wire; Bourrières, J.-P., Ed.; ISTE Ltd.: Washington, DC, USA; John Wiley & Sons: Hoboken, NJ, USA, 2017; pp. 171–217. [Google Scholar] [CrossRef]
- Di Rito, G.; Galatolo, R.; Schettini, F. Experimental and simulation study of the dynamics of an electro-mechanical landing gear actuator. In Proceedings of the 30th Congress of the International Council of the Aeronautical Sciences (ICAS), Daejeon, Korea, 25–30 September 2016. [Google Scholar]
- Giangrande, P.; Al-Timimy, A.; Galassini, A.; Papadopoulos, S.; Degano, M.; Galea, M. Design of PMSM for EMA employed in secondary flight control systems. In Proceedings of the 2018 IEEE International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference (ESARS-ITEC), Nottingham, UK, 7–9 November 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Qiao, G.; Liu, G.; Shi, Z.; Wang, Y.; Ma, S.; Lim, T.C. A review of electromechanical actuators for More/All Electric aircraft systems. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 4128–4151. [Google Scholar] [CrossRef] [Green Version]
- Mazzoleni, M.; Di Rito, G.; Previdi, F. Reliability and safety of electro-mechanical actuators for aircraft applications. In Electro-Mechanical Actuators for the More Electric Aircraft; Advances in Industrial Control; Springer: Cham, Switzerland, 2021; Volume 2, pp. 45–85. [Google Scholar] [CrossRef]
- Balaban, E.; Bansal, P.; Stoelting, P.; Saxena, A.; Goebel, K.F.; Curran, S. A diagnostic approach for electro-mechanical actuators in aerospace systems. In Proceedings of the 2009 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2009; pp. 1–13. [Google Scholar] [CrossRef]
- Ossmann, D.; Van der Linden, F.-L.-J. Advanced sensor fault detection and isolation for electro-mechanical flight actuators. In Proceedings of the NASA/ESA Conference on Adaptive Hardware and Systems, Montreal, QC, Canada, 15–18 June 2015; pp. 1–8. [Google Scholar]
- Ismail, M.A.A.; Balaban, E.; Spangenberg, H. Fault detection and classification for flight control electromechanical actuators. In Proceedings of the 2016 IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016; pp. 1–10. [Google Scholar] [CrossRef]
- Ismail, M.A.A.; Windelberg, J. Fault detection of bearing defects for ballscrew based electro-mechanical actuators. In Proceedings of the World Congress on Condition Monitoring (WCCM), London, UK, 13–16 June 2017; pp. 1–12. [Google Scholar]
- Smith, M.J.; Byington, C.S.; Watson, M.J.; Bharadwaj, S.; Swerdon, G.; Goebel, K.; Balaban, E. Experimental and analytical development of health management for electro-mechanical actuators. In Proceedings of the 2009 IEEE Aerospace conference, Big Sky, MT, USA, 7–14 March 2009; pp. 1–14. [Google Scholar] [CrossRef]
- Garcia, J.R.; Cusido, J.; Rosero, J.A.; Ortega, J.A.; Romeral, L. Reliable electro-mechanical actuators in aircraft. IEEE Aerosp. Electron. Syst. Mag. 2008, 23, 19–25. [Google Scholar] [CrossRef]
- Bennett, J.; Mecrow, B.; Atkinson, D. Safety-critical design of electromechanical actuation systems in commercial aircraft. IET Electr. Power Appl. 2011, 5, 37–47. [Google Scholar] [CrossRef]
- Bennett, J.W.; Atkinson, G.J.; Mecrow, B.C.; Atkinson, D.J. Fault-Tolerant Design Considerations and Control Strategies for Aerospace Drives. IEEE Trans. Ind. Electron. 2011, 59, 2049–2058. [Google Scholar] [CrossRef]
- Rottach, M.; Gerada, C.; Wheeler, P.-W. Design optimisation of a fault-tolerant PM motor drive for an aerospace actuation application. In Proceedings of the 7th IET International Conference on Power Electronics, Machines and Drives (PEMD), Manchester, UK, 8–10 April 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Arriola, D.; Thielecke, F. Design of fault-tolerant control functions for a primary flight control system with electromechanical actuators. In Proceedings of the International Automatic Testing Conference, AUTOTESTCON, National Harbour, MD, USA, 2–5 November 2015; pp. 393–402. [Google Scholar] [CrossRef]
- Di Rito, G.; Galatolo, R.; Schettini, F. Self-monitoring electro-mechanical actuator for medium altitude long endurance unmanned aerial vehicle flight controls. Adv. Mech. Eng. 2016, 8, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Byington, C.; Sloelting, P.; Watson, M.; Edwards, D. A model-based approach to prognostics and health management for flight control actuators. In Proceedings of the 2004 IEEE Aerospace Conference, Big Sky, MT, USA, 6–13 March 2004; pp. 3551–3562. [Google Scholar] [CrossRef]
- Mazzoleni, M.; Maccarana, Y.; Previdi, F.; Pispola, G.; Nardi, M.; Perni, F.; Toro, S. Development of a reliable electro-mechanical actuator for primary control surfaces in small aircrafts. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017; pp. 1142–1147. [Google Scholar] [CrossRef]
- Mazzoleni, M.; Previdi, F.; Scandella, M.; Pispola, G. Experimental Development of a Health Monitoring Method for Electro-Mechanical Actuators of Flight Control Primary Surfaces in More Electric Aircrafts. IEEE Access 2019, 7, 153618–153634. [Google Scholar] [CrossRef]
- Di Rito, G.; Schettini, F.; Galatolo, R. Model-based prognostic health-management algorithms for the freeplay identification in electromechanical flight control actuators. In Proceedings of the 2018 IEEE International Workshop on Metrology for AeroSpace, Rome, Italy, 20–22 June 2018; pp. 340–345. [Google Scholar] [CrossRef]
- Todeschi, M.; Baxerres, L. Health Monitoring for the Flight Control EMAs. IFAC-PapersOnLine 2015, 48, 186–193. [Google Scholar] [CrossRef]
- Blanke, M.; Kinnaert, M.; Lunze, J.; Staroswiecki, M.; Schröder, J. Diagnosis and Fault-Tolerant Control; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar] [CrossRef] [Green Version]
- Di Rito, G.; Schettini, F. Health monitoring of electromechanical flight actuators via position-tracking predictive models. Adv. Mech. Eng. 2018, 10, 1–12. [Google Scholar] [CrossRef]
- Ferranti, L.; Wan, Y.; Keviczky, T. Fault-tolerant reference generation for model predictive control with active diagnosis of elevator jamming faults. Int. J. Robust Nonlinear Control 2018, 29, 5412–5428. [Google Scholar] [CrossRef]
- Ferranti, L.; Wan, Y.; Keviczky, T. Predictive flight control with active diagnosis and reconfiguration for actuator jamming. IFAC-PapersOnLine 2015, 48, 166–171. [Google Scholar] [CrossRef]
- Arriola, D.; Thielecke, F. Model-based design and experimental verification of a monitoring concept for an active-active electromechanical aileron actuation system. Mech. Syst. Signal Process. 2017, 94, 322–345. [Google Scholar] [CrossRef]
- Annaz, F.Y. Fundamental design concepts in multi-lane smart electromechanical actuators. Smart Mater. Struct. 2005, 14, 1227–1238. [Google Scholar] [CrossRef]
- Yu, Z.Y.; Niu, T.; Dong, H.L. A jam-tolerant electromechanical system. In Proceedings of the ACTUATOR 2018: 16th International Conference on New Actuators, Bremen, Germany, 25–27 June 2018; pp. 551–554. [Google Scholar]
- Gao, Z.; Cecati, C.; Ding, S.X. A Survey of Fault Diagnosis and Fault-Tolerant Techniques—Part I: Fault Diagnosis with Model-Based and Signal-Based Approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef] [Green Version]
- Gao, Z.; Cecati, C.; Ding, S.X. A Survey of Fault Diagnosis and Fault-Tolerant Techniques—Part II: Fault Diagnosis with Knowledge-Based and Hybrid/Active Approaches. IEEE Trans. Ind. Electron. 2015, 62, 3768–3774. [Google Scholar] [CrossRef] [Green Version]
- Mazzoleni, M.; Di Rito, G.; Previdi, F. Fault diagnosis and condition monitoring approaches. In Electro-Mechanical Actuators for the More Electric Aircraft; Advances in Industrial Control; Springer: Cham, Switzerland, 2021; Volume 3, pp. 87–117. [Google Scholar] [CrossRef]
- Chirico, A.J.; Kolodziej, J.R. A Data-Driven Methodology for Fault Detection in Electromechanical Actuators. J. Dyn. Syst. Meas. Control 2014, 136, 041025. [Google Scholar] [CrossRef]
- Bodden, D.S.; Clements, N.S.; Schley, B.; Jenney, G. Seeded failure testing and analysis of an electro-mechanical actuator. In Proceedings of the 2007 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2007; pp. 1–8. [Google Scholar] [CrossRef]
- Di Rito, G.; Luciano, B.; Borgarelli, N.; Nardeschi, M. Health-monitoring of a jamming-tolerant electro-mechanical actuator with differential ball screws. In Proceedings of the 2020 IEEE International Workshop on Metrology for Aerospace, Pisa, Italy, 22–24 June 2020; pp. 84–89. [Google Scholar] [CrossRef]
- Mazzoleni, M.; Di Rito, G.; Previdi, F. Fault diagnosis and condition monitoring of aircraft electro-mechanical actuators. In Electro-Mechanical Actuators for the More Electric Aircraft; Advances in Industrial Control; Springer: Cham, Switzerland, 2021; Volume 4, pp. 119–224. [Google Scholar] [CrossRef]
- Texas Instruments. C2000 Real-Time Microcontrollers. Available online: https://www.ti.com/product/TMS320F28335 (accessed on 25 August 2021).
- Allegro Microsystems. Automotive Grade, Fully Integrated, Hall-Effect-Based Linear Current Sensor IC with 2.1 kVRMS Voltage Isolation and Low-Resistance Current Conductor. Available online: https://www.allegromicro.com/en/products/sense (accessed on 25 August 2021).
- Tamagawa. Brushless Resolvers (Smartsyn). Available online: https://www.tamagawa-seiki.com/products/resolver-synchro/brushless-resolver-smartsyn.html (accessed on 25 August 2021).
- Analog Devices. AD2S1210 Variable Resolution, 10-Bit to 16-Bit R/D Converter with Reference Oscillator. Available online: https://www.analog.com/en/products/ad2s1210.html (accessed on 25 August 2021).
- Meggitt. DJD100759C0 LVDT Simplex ±37 mm. Available online: https://www.meggittsensorex.fr/en/sensorex-catalog/technologies/lvdt/ (accessed on 25 August 2021).
- Olsson, H.; Åström, K.; De Wit, C.C.; Gäfvert, M.; Lischinsky, P. Friction Models and Friction Compensation. Eur. J. Control 1998, 4, 176–195. [Google Scholar] [CrossRef] [Green Version]
- Andersson, S.; Söderberg, A.; Björklund, S. Friction models for sliding dry, boundary and mixed lubricated contacts. Tribol. Int. 2007, 40, 580–587. [Google Scholar] [CrossRef]
- Dutta, C.; Tripathi, S.M. Comparison between conventional and loss d-q model of PMSM. In Proceedings of the International Conference on Emerging Trends in Electrical Electronics & Sustainable Energy Systems (ICETEESES), Sultanpur, India, 11–12 March 2016; pp. 256–260. [Google Scholar] [CrossRef]
- Zhang, C.; Tian, Z.; Dong, Y.; Zhang, S. Analysis of losses and thermal model in a surface-mounted permanent-magnet synchronous machine over a wide-voltage range of rated output power operation. In Proceedings of the IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Åström, K.J.; Hägglund, T. Advanced PID Control; ISA—The Instrumentation, Systems, and Automation Society: Pittsburgh, PA, USA, 2006. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Motor 1 State | Motor 2 State | Screwshaft Motion | Motors Speeds Constraint | Output Speed |
|---|---|---|---|---|---|
| ASB (fail-operative) | Active | Braked & De-energized | Roto-translation | ||
| SBA (fail-operative) | Braked & De-energized | Active | Roto-translation | ||
| AAPT (fail-operative) | Active | Active | Translation | ||
| AAPR (fail-operative) | Active | Active | Rotation | ||
| AAEP (normal operation) | Active | Active | Roto-translation |
| Component | Model | Range | Accuracy |
|---|---|---|---|
| Current sensor | Allegro ACS714 | ±30 A | 0.3 A |
| Resolver | Tamagawa TS2651N141E78 | ±π rad | 0.0029 rad |
| Resolver analog-to-digital converter | Analog Devices AD2S1210 | ±π rad | 0.0014 rad |
| LVDT | Meggitt DJD100759C0 | ±0.037 m | 5 × 10−5 m |
| n. of Sensor Faults | CAF1 | CAF2 | LF1 | LF2 | VAF1 | VAF2 | VLF | EMA State |
|---|---|---|---|---|---|---|---|---|
| 0 | OK | OK | OK | OK | CAF1 | CAF2 | LF1 | OK |
| EAF11 | EAF21 | LF2 | ||||||
| EAF12 | EAF22 | ELF | ||||||
| 1 | Fail | OK | OK | OK | EAF11 | CAF2 | LF1 | OK |
| EAF12 | LF2 | |||||||
| OK | Fail | OK | OK | CAF1 | CAF2 | LF1 | ||
| EAF22 | LF2 | |||||||
| OK | OK | Fail | OK | CAF1 | CAF2 | LF2 | ||
| EAF12 | EAF22 | ELF | ||||||
| OK | OK | OK | Fail | CAF1 | CAF2 | LF1 | ||
| EAF11 | EAF21 | ELF | ||||||
| 2 | Fail | OK | Fail | OK | EAF12 | CAF2 | LF2 | OK |
| Fail | OK | OK | Fail | EAF11 | CAF2 | LF1 | OK | |
| OK | Fail | Fail | OK | CAF1 | EAF22 | LF2 | OK | |
| OK | Fail | OK | Fail | CAF1 | EAF21 | LF1 | OK | |
| OK | OK | Fail | Fail | CAF1 | CAF2 | ELF | OK | |
| Fail | Fail | OK | OK | No signal | No signal | LF1 | Fail | |
| LF2 |
| Group | Sums of Currents | Common Measurement | Class |
|---|---|---|---|
| GaC | Σi1, Σi2, Σi3, Σi4 | Ii a C | Ca |
| GaM | Σi5, Σi6, Σi7, Σi8 | Ii a M | |
| GbC | Σi1, Σi2, Σi5, Σi6 | Ii b C | Cb |
| GbM | Σi3, Σi4, Σi7, Σi8 | Ii b M | |
| GcC | Σi1, Σi4, Σi6, Σi7 | Ii c C | Cc |
| GcM | Σi2, Σi3, Σi5, Σi8 | Ii c M |
| Parameter | Value | Unit | Definition Criterion |
|---|---|---|---|
| fmon | 2000 | Hz | ECU limitation |
| εd 1 = εd 2 | 2.5 × 10−3 | rad | FDI latency < 20 ms |
| εth|1 = εth|2 | 0.05 | rad | FDI latency < 20 ms |
| cmonmax|1 = cmon max|2 | 16 | -- | FDI latency < 20 ms |
| εs | 0.12 × 10−3 | m/s | FDI latency < 100 ms |
| εth|ssRJ | 2 | rad/s | FDI latency < 100 ms |
| εth|ssTJ | 1 | rad/s | FDI latency < 100 ms |
| cmon max|ssRJ = cmon max|ssTJ | 20 | -- | FDI latency < 100 ms |
| Parameter | Meaning | Value | Unit |
|---|---|---|---|
| ps1 | Lead of the motor 1 ball-nut | −15 × 10−3 | m |
| ps2 | Lead of the motor 2 ball-nut | 15 × 10−3 | m |
| ps3 | Lead of the output shaft ball-nut | −3.175 × 10−3 | m |
| J1 = J2 | Motors inertia | 6.5 × 10−3 | kg∙m2 |
| Jss | Screwshaft inertia | 6.5 × 10−3 | kg∙m2 |
| mss | Screwshaft mass | 0.9 | kg |
| mo | Output shaft mass | 1.3 | kg |
| R | Motors phase resistance | 0.41 | ohm |
| Ld | Motors inductance on direct axis | 2 × 10−3 | H |
| Lq | Motors inductance on quadrant axis | 2 × 10−3 | H |
| kt | Motors torque constant | 0.97 | N∙m/A |
| nd | Motors pole pairs | 15 | -- |
| Vsupply | DC voltage supply | 28 | V |
| Iq max | Maximum quadrature current | 25 | A |
| ωm max | Maximum motors speed | 25 | rad/s |
| xo max | Midstroke displacement | 25 × 10−3 | m |
| k1 = k2 | Stiffness of the motors ball-nuts | 3.67 × 105 | N∙m/rad |
| k3 | Stiffness of the output shaft ball-nut | 9.8 × 103 | N∙m/rad |
| d1 = d2 | Damping of the motors ball-nuts | 9.73 | N∙m∙s/rad |
| d3 | Damping of the output shaft ball-nut | 0.39 | N∙m∙s/rad |
| Tfr 1 | Coulomb friction on motor 1 | 5.73 | N∙m |
| ωfr 1 | Coulomb velocity on motor 1 | 0.15 | rad/s |
| Tfr 2 | Coulomb friction on motor 2 | 2.68 | N∙m |
| ωfr 2 | Coulomb velocity on motor 2 | 0.15 | rad/s |
| Ffr o | Coulomb friction on output shaft | 15 | N |
| vfr o | Coulomb velocity on output shaft | 0.001 | m/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Di Rito, G.; Luciano, B.; Borgarelli, N.; Nardeschi, M. Model-Based Condition-Monitoring and Jamming-Tolerant Control of an Electro-Mechanical Flight Actuator with Differential Ball Screws. Actuators 2021, 10, 230. https://0-doi-org.brum.beds.ac.uk/10.3390/act10090230
Di Rito G, Luciano B, Borgarelli N, Nardeschi M. Model-Based Condition-Monitoring and Jamming-Tolerant Control of an Electro-Mechanical Flight Actuator with Differential Ball Screws. Actuators. 2021; 10(9):230. https://0-doi-org.brum.beds.ac.uk/10.3390/act10090230
Chicago/Turabian StyleDi Rito, Gianpietro, Benedetto Luciano, Nicola Borgarelli, and Marco Nardeschi. 2021. "Model-Based Condition-Monitoring and Jamming-Tolerant Control of an Electro-Mechanical Flight Actuator with Differential Ball Screws" Actuators 10, no. 9: 230. https://0-doi-org.brum.beds.ac.uk/10.3390/act10090230