Low-Speed Bearing Fault Diagnosis Based on Permutation and Spectral Entropy Measures




Abstract
:1. Introduction
2. Theoretical Background
2.1. Permutation Entropy
2.2. Spectral Entropy
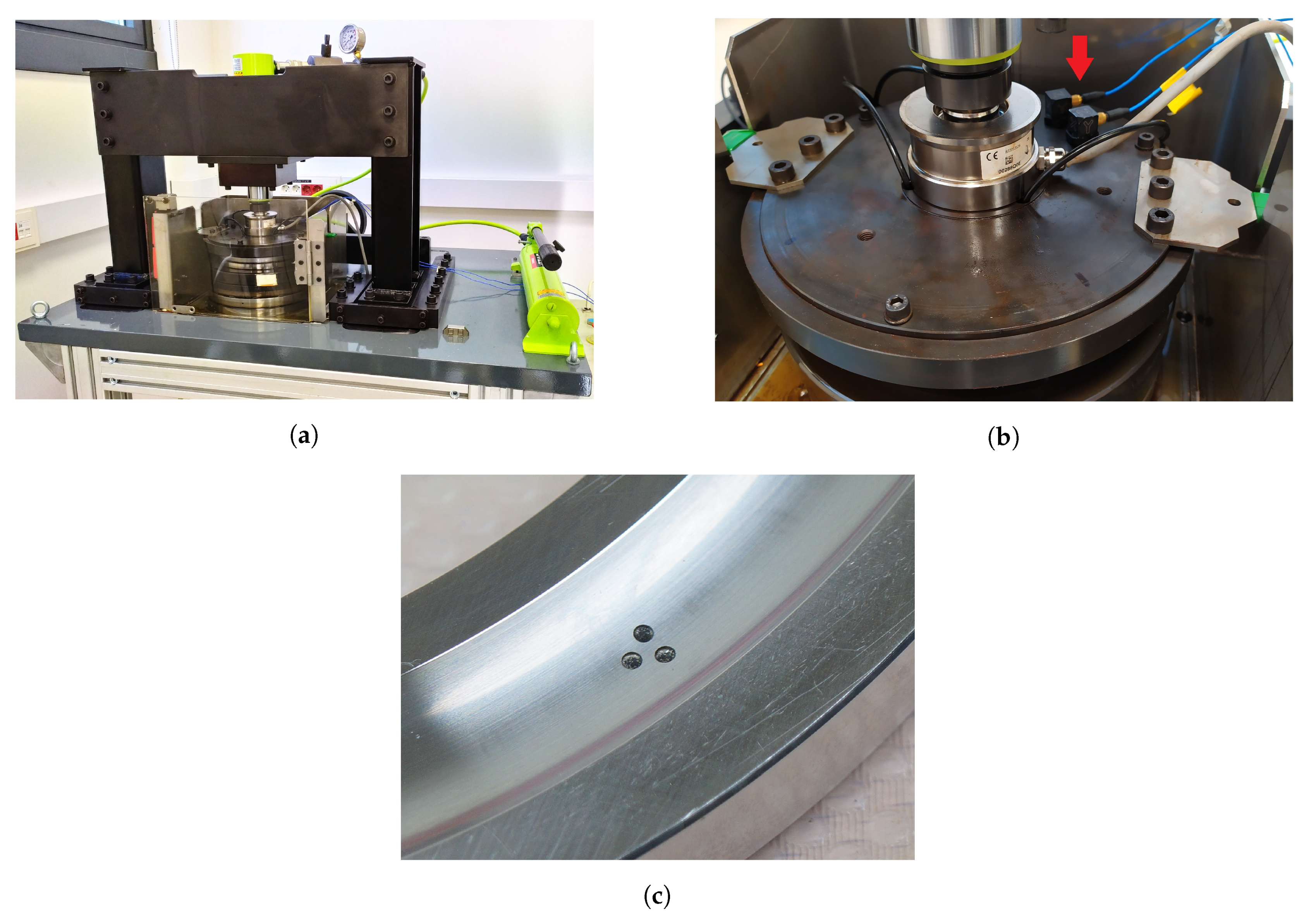
3. Experimental Set-Up
4. Methodology
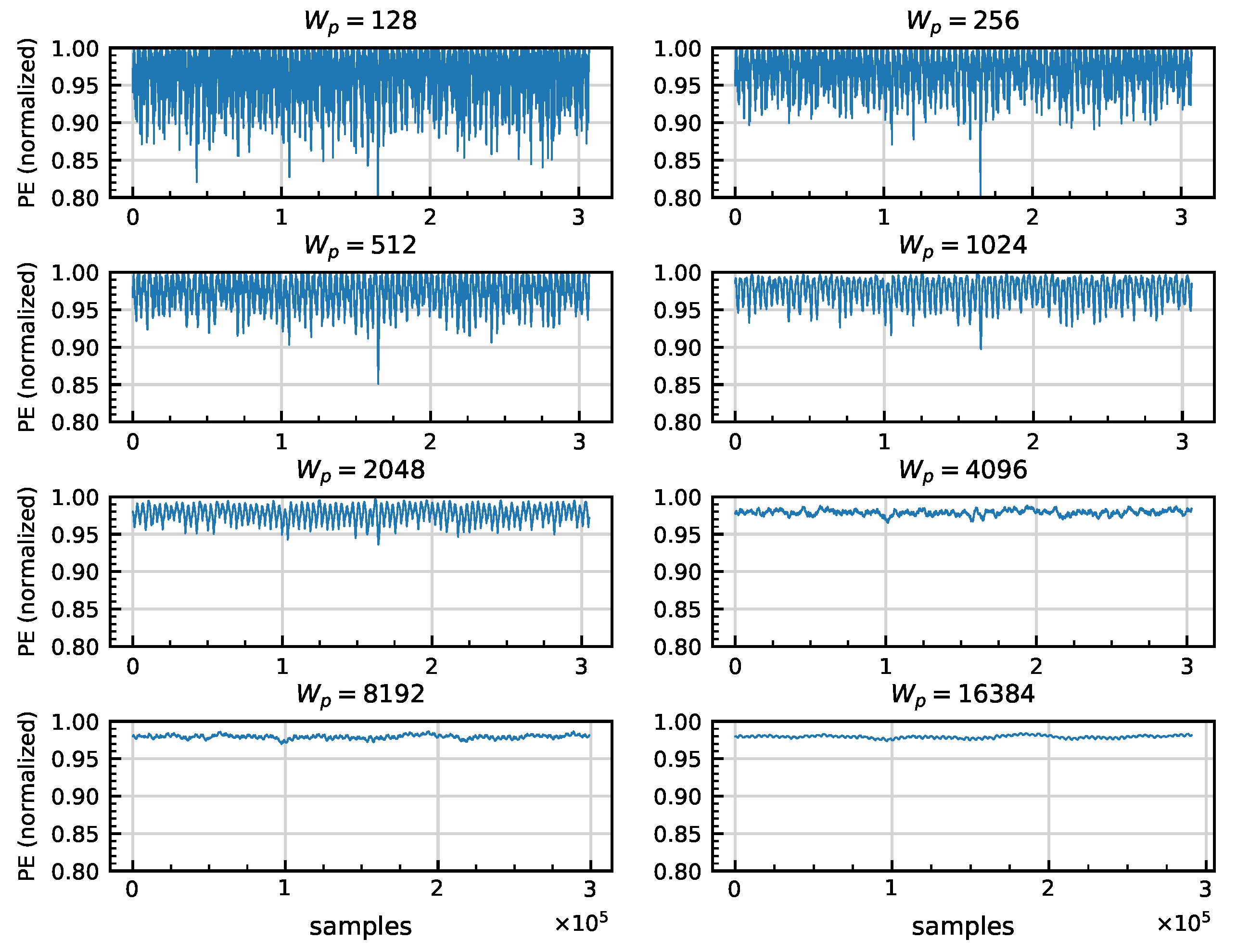
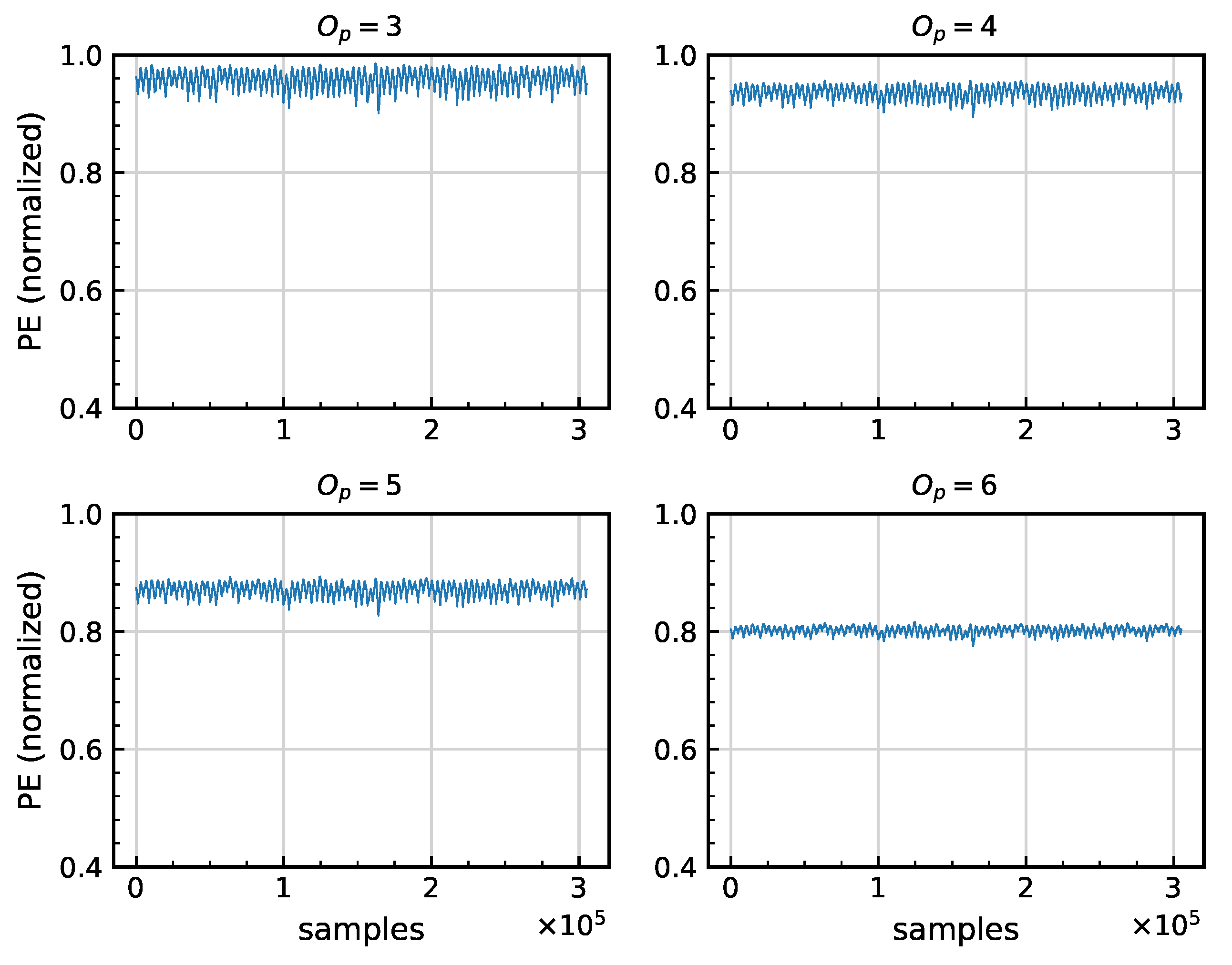
- The raw vibration signal is used for the PE process. As a result, the PE signal is obtained from the PE process.
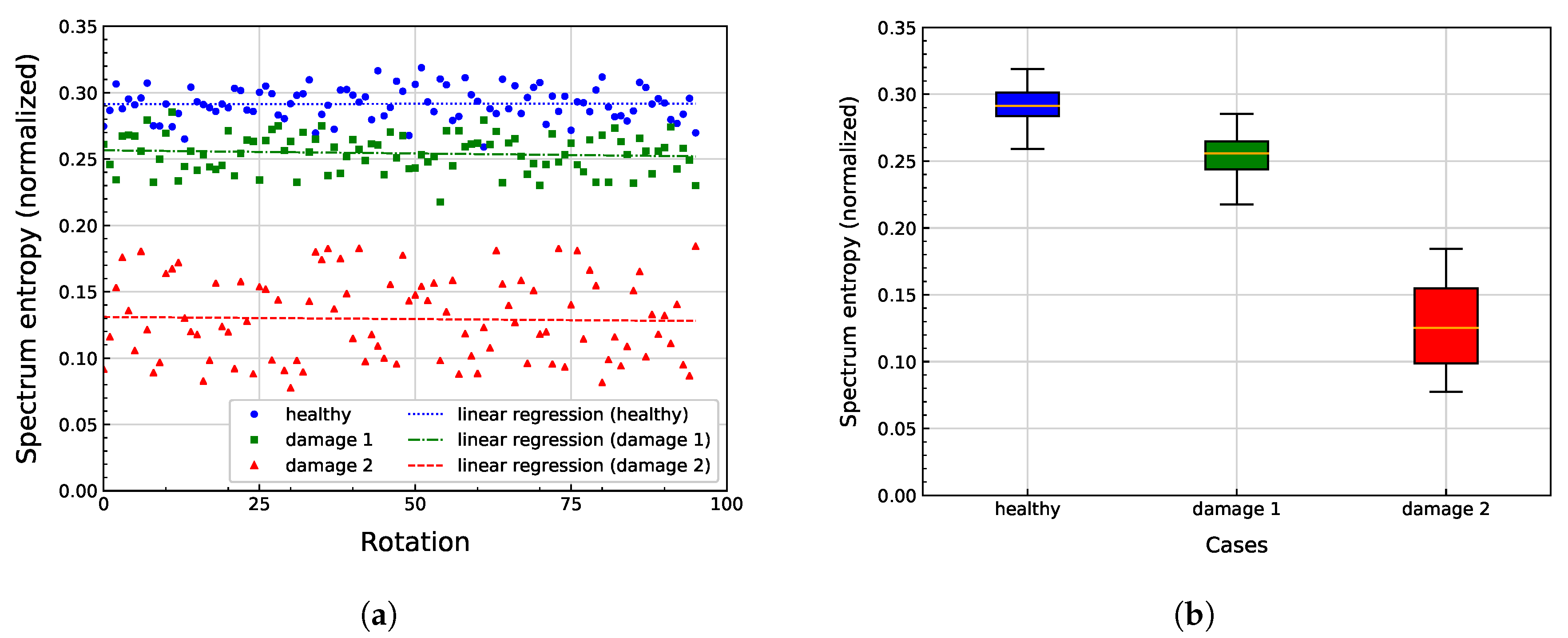
- The PE signal is later used by the SE process to calculate the SE value according to the rotation time.
5. Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AE | acoustic emission |
| CBM | condition based maintenance |
| D1 | damage 1 scenario |
| D2 | damage 2 scenario |
| EEMD | ensemble empirical mode decomposition |
| EMD | empirical mode decomposition |
| HS | healthy scenario |
| O&M | operation and maintenance |
| PE | permutation entropy |
| PSD | power spectral density |
| RMS | root mean square |
| rpm | revolutions per minute |
| SE | spectral entropy |
References
- Komusanac, I.; Fraile, D.; Brindley, G. Wind Energy in Europe in 2018; Technical Report; Wind Europe: Brussels, Belgium, 2019. [Google Scholar]
- Walsh, C.; Ramírez, L.; Fraile, D.; Brindley, G. Wind Energy in Europe in 2019; Technical Report; Wind Europe: Brussels, Belgium, 2020. [Google Scholar]
- IRENA. Future of Wind: Deployment, Investment, Technology, Grid Integration and Socio-Economic Aspects (A Global Energy Transformation Paper); Technical Report; International Renewable Energy Agency: Abu Dhabi, UAE, 2019. [Google Scholar]
- IRENA. Renewable Energy Cost Analysis—Wind Power; Technical Report; International Renewable Energy Agency: Abu Dhabi, UAE, 2012. [Google Scholar]
- IRENA. Floating Foundations: A Game Changer for Offshore Wind Power; Technical Report; International Renewable Energy Agency: Abu Dhabi, UAE, 2016. [Google Scholar]
- Lynn, P. Onshore and Offshore Wind Energy: An Introduction, 1st ed.; John Wiley & Sons Ltd.: West Sussex, UK, 2011. [Google Scholar]
- Tchakoua, P.; Wamkeue, R.; Ouhrouche, M.; Slaoui-Hasnaoui, F.; Tameghe, T.A.; Ekemb, G. Wind Turbine Condition Monitoring: State-of-the-Art Review, New Trends, and Future Challenges. Energies 2014, 7, 2595–2630. [Google Scholar] [CrossRef] [Green Version]
- Kania, L.; Krynke, M.; Mazanek, E. A Catalogue Capacity of Slewing Bearings. Mech. Mach. Theory 2012, 58, 29–45. [Google Scholar] [CrossRef]
- Ossai, C.I.; Boswell, B.; Davies, I.J. A Markovian Approach for Modelling the Effects of Maintenance on Downtime and Failure Risk of Wind Turbine Components. Renew. Energy 2016, 96, 775–783. [Google Scholar] [CrossRef]
- Stamboliska, Z.; Rusiński, E.; Moczko, P. Condition Monitoring Considerations for Low-Speed Machines. In Proactive Condition Monitoring of Low-Speed Machines; Springer International Publishing: Cham, Switzerland, 2015; pp. 35–52. [Google Scholar]
- Wang, F.; Liu, C.; Su, W.; Xue, Z.; Li, H.; Han, Q. Condition Monitoring and Fault Diagnosis Methods for Low-Speed and Heavy-Load Slewing Bearings: A Literature Review. J. Vibroeng. 2017, 19, 3429–3444. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, L. A Review of Failure Modes, Condition Monitoring and Fault Diagnosis Methods for Large-Scale Wind Turbine Bearings. Measurement 2020, 149, 107002. [Google Scholar] [CrossRef]
- Sandoval, D.; Leturiondo, U.; Pozo, F.; Vidal, Y.; Salgado, O. Revisión de las técnicas de monitorización del estado de los rodamientos de las palas de los aerogeneradores. DYNA 2019, 94, 636–642. [Google Scholar] [CrossRef]
- Sandoval, D.; Leturiondo, U.; Pozo, F.; Vidal, Y.; Salgado, O. Trends in Condition Monitoring for Pitch Bearings. In Proceedings of the 16th International Conference on Condition Monitoring and Asset Management, CM, Glasgow, UK, 25–27 June 2019. [Google Scholar] [CrossRef]
- Elforjani, M.; Mba, D. Monitoring the Onset and Propagation of Natural Degradation Process in a Slow Speed Rolling Element Bearing With Acoustic Emission. J. Vib. Acoust. 2008, 130, 041013. [Google Scholar] [CrossRef]
- Omoregbee, O.; Heyns, P. Low Speed Rolling Bearing Diagnostics Using Acoustic Emission and Higher Order Statistics Techniques. J. Mech. Eng. Res. Dev. 2018, 41, 18–23. [Google Scholar] [CrossRef]
- He, Y.; Zhang, X.; Friswell, M.I. Defect Diagnosis for Rolling Element Bearings Using Acoustic Emission. J. Vib. Acoust. 2009, 131, 061012. [Google Scholar] [CrossRef] [Green Version]
- Elforjani, M.; Mba, D. Accelerated Natural Fault Diagnosis in Slow Speed Bearings with Acoustic Emission. Eng. Fract. Mech. 2010, 77, 112–127. [Google Scholar] [CrossRef]
- He, Y.; Zhang, X. Approximate Entropy Analysis of the Acoustic Emission From Defects in Rolling Element Bearings. J. Vib. Acoust. 2012, 134, 061012. [Google Scholar] [CrossRef]
- Caesarendra, W.; Kosasih, B.; Tieu, A.K.; Zhu, H.; Moodie, C.A.S.; Zhu, Q. Acoustic Emission-Based Condition Monitoring Methods: Review and Application for Low Speed Slew Bearing. Mech. Syst. Signal Process. Dev. 2016, 72–73, 134–159. [Google Scholar] [CrossRef]
- Caesarendra, W.; Kosasih, B.; Tieu, K.; Moodie, C. An Application of Nonlinear Feature Extraction—A Case Study for Low Speed Slewing Bearing Condition Monitoring and Prognosis. In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics: Mechatronics for Human Wellbeing, AIM, Wollongong, NSW, Australia, 9–12 July 2013; pp. 1713–1718. [Google Scholar] [CrossRef] [Green Version]
- Rojas, A.; Nandi, A.K. Detection and Classification of Rolling-Element Bearing Faults Using Support Vector Machines. In Proceedings of the 2005 IEEE Workshop on Machine Learning for Signal Processing, Mystic, CT, USA, 28–28 September 2005; pp. 153–158. [Google Scholar] [CrossRef]
- Caesarendra, W.; Tjahjowidodo, T. A Review of Feature Extraction Methods in Vibration-Based Condition Monitoring and Its Application for Degradation Trend Estimation of Low-Speed Slew Bearing. Machines 2017, 5, 21. [Google Scholar] [CrossRef]
- Moodie, C. An Investigation into the Condition Monitoring of Large Slow Speed Slew Bearings. In University of Wollongong Thesis Collection 1954–2016: Wollongong; University of Wollongong: Wollongong, Australia, 2009. [Google Scholar]
- Caesarendra, W.; Tjahjowidodo, T.; Kosasih, B.; Tieu, A. Integrated Condition Monitoring and Prognosis Method for Incipient Defect Detection and Remaining Life Prediction of Low Speed Slew Bearings. Machines 2017, 5, 11. [Google Scholar] [CrossRef] [Green Version]
- Jiao, Y.; Li, G.; Wu, Z.; Geng, H.; Zhang, J.; Cheng, L. Fault Analysis for Low-Speed Heavy-Duty Crane Slewing Bearing Based on Wavelet Energy Spectrum Coefficient. In Advances in Acoustic Emission Technology; Shen, G., Wu, Z., Zhang, J., Eds.; Springer International Publishing: Cham, Switzerlaned, 2017; pp. 63–74. [Google Scholar]
- Mishra, C.; Samantaray, A.; Chakraborty, G. Rolling Element Bearing Fault Diagnosis under Slow Speed Operation Using Wavelet De-Noising. Meas. J. Int. Meas. Confed. 2017, 103, 77–86. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, L.; Carrasco, J. Vibration Analysis for Large-Scale Wind Turbine Blade Bearing Fault Detection with an Empirical Wavelet Thresholding Method. Renew. Energy 2020, 146, 99–110. [Google Scholar] [CrossRef]
- Yu, K.; Lin, T.R.; Tan, J.; Ma, H. An Adaptive Sensitive Frequency Band Selection Method for Empirical Wavelet Transform and Its Application in Bearing Fault Diagnosis. Measurement 2019, 134, 375–384. [Google Scholar] [CrossRef]
- Wang, S.; Niu, P.; Guo, Y.; Wang, F.; Li, W.; Shi, H.; Han, S. Early Diagnosis of Bearing Faults Using Decomposition and Reconstruction Stochastic Resonance System. Measurement 2020, 158, 107709. [Google Scholar] [CrossRef]
- Caesarendra, W.; Kosasih, P.; Tieu, A.; Moodie, C.; Choi, B.K. Condition Monitoring of Naturally Damaged Slow Speed Slewing Bearing Based on Ensemble Empirical Mode Decomposition. J. Mech. Sci. Technol. 2013, 27, 2253–2262. [Google Scholar] [CrossRef]
- Bao, W.; Miao, X.; Wang, H.; Yang, G.; Zhang, H. Remaining Useful Life Assessment of Slewing Bearing Based on Spatial-Temporal Sequence. IEEE Access 2020, 8, 9739–9750. [Google Scholar] [CrossRef]
- Han, T.; Liu, Q.; Zhang, L.; Tan, A. Fault Feature Extraction of Low Speed Roller Bearing Based on Teager Energy Operator and CEEMD. Meas. J. Int. Meas. Confed. 2019, 138, 400–408. [Google Scholar] [CrossRef]
- Richman, J.S.; Moorman, J.R. Physiological Time-Series Analysis Using Approximate Entropy and Sample Entropy. Am. J. Physiol. Heart Circ. Physiol. 2000, 278, H2039–H2049. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Henry, M.; Judge, G. Permutation Entropy and Information Recovery in Nonlinear Dynamic Economic Time Series. Econometrics 2019, 7, 10. [Google Scholar] [CrossRef] [Green Version]
- Shang, Y.; Lu, G.; Kang, Y.; Zhou, Z.; Duan, B.; Zhang, C. A Multifault Diagnosis Method Based on Modified Sample Entropy for Lithium-Ion Battery Strings. J. Power Sources 2020, 446, 227275. [Google Scholar] [CrossRef]
- Yan, R.; Gao, R.X. Approximate Entropy as a Diagnostic Tool for Machine Health Monitoring. Mech. Syst. Signal Process. 2007, 21, 824–839. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, R.; Li, Y.; Zhang, P.; Yang, J.; Zhao, X.; Liu, M.; Wu, D. Multispectral Image Segmentation Based on a Fuzzy Clustering Algorithm Combined with Tsallis Entropy and a Gaussian Mixture Model. Remote Sens. 2019, 11, 2772. [Google Scholar] [CrossRef] [Green Version]
- Xue, W.; Dai, X.; Zhu, J.; Luo, Y.; Yang, Y. A Noise Suppression Method of Ground Penetrating Radar Based on EEMD and Permutation Entropy. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1625–1629. [Google Scholar] [CrossRef]
- Fei, C.W.; Choy, Y.S.; Bai, G.C.; Tang, W.Z. Multi Feature Entropy Distance Approach with Vibration and Acoustic Emission Signals for Process Feature Recognition of Rolling Element Bearing Faults. Struct. Health Monit. 2017, 17, 156–168. [Google Scholar] [CrossRef]
- Gu, R.; Chen, J.; Hong, R.; Wang, H.; Wu, W. Incipient Fault Diagnosis of Rolling Bearings Based on Adaptive Variational Mode Decomposition and Teager Energy Operator. Measurement 2020, 149, 106941. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, Y.; Li, X.; Liu, M. Bearing Fault Diagnosis with Kernel Sparse Representation Classification Based on Adaptive Local Iterative Filtering-Enhanced Multiscale Entropy Features. Math. Probl. Eng. 2019, 2019, 7905674. [Google Scholar] [CrossRef] [Green Version]
- Zhao, D.; Liu, S.; Gu, D.; Sun, X.; Wang, L.; Wei, Y.; Zhang, H. Improved Multi-Scale Entropy and It’s Application in Rolling Bearing Fault Feature Extraction. Measurement 2020, 152, 107361. [Google Scholar] [CrossRef]
- Yang, C.; Jia, M. Health Condition Identification for Rolling Bearing Based on Hierarchical Multiscale Symbolic Dynamic Entropy and Least Squares Support Tensor Machine–Based Binary Tree. Struct. Health Monit. 2020. [Google Scholar] [CrossRef]
- Huo, Z.; Zhang, Y.; Jombo, G.; Shu, L. Adaptive Multiscale Weighted Permutation Entropy for Rolling Bearing Fault Diagnosis. IEEE Access 2020, 8, 87529–87540. [Google Scholar] [CrossRef]
- Fu, W.; Shao, K.; Tan, J.; Wang, K. Fault Diagnosis for Rolling Bearings Based on Composite Multiscale Fine-Sorted Dispersion Entropy and SVM With Hybrid Mutation SCA-HHO Algorithm Optimization. IEEE Access 2020, 8, 13086–13104. [Google Scholar] [CrossRef]
- Wang, H.; Du, W. Feature Extraction of Latent Fault Components of Rolling Bearing Based on Self-Learned Sparse Atomics and Frequency Band Entropy. J. Vib. Control 2020. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, Y.; Zhang, B.; Su, W. Application of Wavelet Packet Sample Entropy in the Forecast of Rolling Element Bearing Fault Trend. In Proceedings of the 2011 International Conference on Multimedia and Signal Processing, Toronto, ON, Canada, 27–28 April 2011; Volume 2, pp. 12–16. [Google Scholar] [CrossRef]
- Qin, X.; Li, Q.; Dong, X.; Lv, S. The Fault Diagnosis of Rolling Bearing Based on Ensemble Empirical Mode Decomposition and Random Forest. 2017. Available online: https://www.hindawi.com/journals/sv/2017/2623081/ (accessed on 26 June 2020).
- Li, H.; Liu, T.; Wu, X.; Chen, Q. Enhanced Frequency Band Entropy Method for Fault Feature Extraction of Rolling Element Bearings. IEEE Trans. Ind. Inform. 2020, 16, 5780–5791. [Google Scholar] [CrossRef]
- Lu, C.; Chen, J.; Hong, R.; Feng, Y.; Li, Y. Degradation Trend Estimation of Slewing Bearing Based on LSSVM Model. Mech. Syst. Signal Process. 2016, 76–77, 353–366. [Google Scholar] [CrossRef]
- Shannon, C.E. A Mathematical Theory of Communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef] [Green Version]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, UK, 2016. [Google Scholar]
- Rostaghi, M.; Azami, H. Dispersion Entropy: A Measure for Time-Series Analysis. IEEE Signal Process. Lett. 2016, 23, 610–614. [Google Scholar] [CrossRef]
- Gorobets, A.Y.; Berdyugina, S.V. Stochastic Entropy Production in the Quite Sun Magnetic Fields. Mon. Not. R. Astron. Soc. Lett. 2018, 483, L69–L74. [Google Scholar] [CrossRef]
- Bandt, C.; Pompe, B. Permutation Entropy: A Natural Complexity Measure for Time Series. Phys. Rev. Lett. 2002, 88, 174102. [Google Scholar] [CrossRef]
- Fouda, J.S.A.E.; Koepf, W.; Jacquir, S. The Ordinal Kolmogorov-Sinai Entropy: A Generalized Approximation. Commun. Nonlinear Sci. Numer. Simul. 2017, 46, 103–115. [Google Scholar] [CrossRef]
- Powell, G.E.; Percival, I.C. A Spectral Entropy Method for Distinguishing Regular and Irregular Motion of Hamiltonian Systems. J. Phys. A Math. Gen. 1979, 12, 2053–2071. [Google Scholar] [CrossRef]
- Inouye, T.; Shinosaki, K.; Sakamoto, H.; Toi, S.; Ukai, S.; Iyama, A.; Katsuda, Y.; Hirano, M. Quantification of EEG Irregularity by Use of the Entropy of the Power Spectrum. Electroencephalogr. Clin. Neurophysiol. 1991, 79, 204–210. [Google Scholar] [CrossRef]
- Abásolo, D.; Hornero, R.; Espino, P.; Álvarez, D.; Poza, J. Entropy Analysis of the EEG Background Activity in Alzheimer\textquotesingles Disease Patients. Physiol. Meas. 2006, 27, 241–253. [Google Scholar] [CrossRef] [Green Version]
- Pan, Y.N.; Chen, J.; Li, X.L. Spectral Entropy: A Complementary Index for Rolling Element Bearing Performance Degradation Assessment. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2008. [Google Scholar] [CrossRef]
- Harris, T.; Rumbarger, J.H.; Butterfield, C.P. Wind Turbine Design Guideline DG03: Yaw and Pitch Rolling Bearing Life; Technical Report; National Renewable Energy Laboratory: Golden, CO, USA, 2009. [CrossRef] [Green Version]
- Caesarendra, W.; Pratama, M.; Tjahjowidodo, T.; Tieud, K.; Kosasih, B. Parsimonious Network Based on Fuzzy Inference System (PANFIS) for Time Series Feature Prediction of Low Speed Slew Bearing Prognosis. Appl. Sci. 2018, 8, 2656. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Chen, J.; Wang, H.; Zhang, D. Degradation Evaluation of Slewing Bearing Using HMM and Improved GRU. Measurement 2019. [Google Scholar] [CrossRef]
- Bao, W.; Wang, H.; Chen, J.; Zhang, B.; Ding, P.; Wu, J.; He, P. Life Prediction of Slewing Bearing Based on Isometric Mapping and Fuzzy Support Vector Regression. Trans. Inst. Meas. Control 2019. [Google Scholar] [CrossRef]
- Liu, C.; Wang, F. A Review of Current Condition Monitoring and Fault Diagnosis Methods for Low-Speed and Heavy-Load Slewing Bearings. In Proceedings of the 2017 9th International Conference on Modelling, Identification and Control, ICMIC, Kunming, China, 10–12 July 2017; Volume 2018, pp. 104–109. [Google Scholar] [CrossRef]
- Caesarendra, W.; Kosasih, B.; Tieu, A.; Moodie, C. Circular Domain Features Based Condition Monitoring for Low Speed Slewing Bearing. Mech. Syst. Signal Process. 2014, 45, 114–138. [Google Scholar] [CrossRef] [Green Version]
- Randall, R.B.; Antoni, J. Rolling Element Bearing Diagnostics—A Tutorial. Mech. Syst. Signal Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Slope | y-intercept | |
|---|---|---|
| healthy | −4.24 × 10−6 | 0.29 |
| damage 1 | −4.74 × 10−5 | 0.26 |
| damage 2 | −3.18 × 10−5 | 0.13 |
| Md | s | ||
|---|---|---|---|
| healthy | 0.292 | 0.291 | 0.012 |
| damage 1 | 0.254 | 0.256 | 0.014 |
| damage 2 | 0.129 | 0.125 | 0.031 |
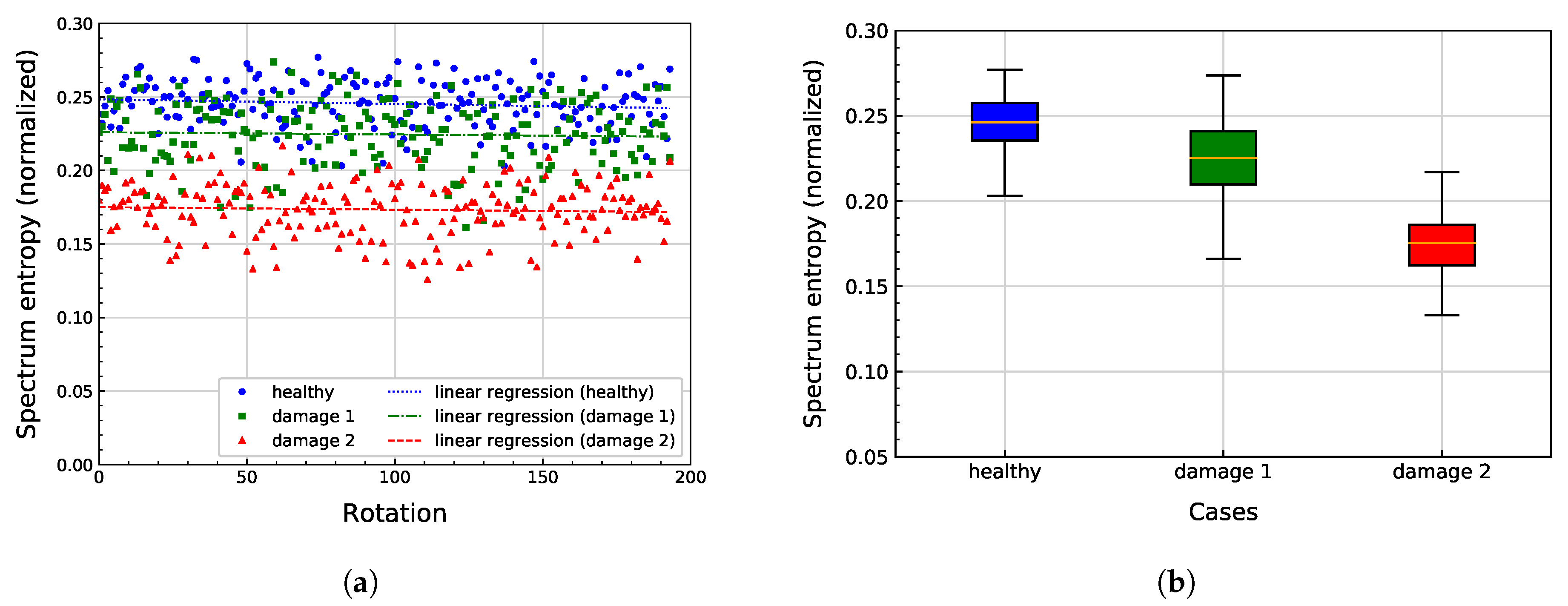
| Slope | y-intercept | |
|---|---|---|
| healthy | −3.05 × 10−5 | 0.25 |
| damage 1 | −1.51 × 10−5 | 0.23 |
| damage 2 | −1.71 × 10−5 | 0.18 |
| Md | s | ||
|---|---|---|---|
| healthy | 0.245 | 0.246 | 0.016 |
| damage 1 | 0.225 | 0.225 | 0.022 |
| damage 2 | 0.173 | 0.175 | 0.018 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sandoval, D.; Leturiondo, U.; Pozo, F.; Vidal, Y. Low-Speed Bearing Fault Diagnosis Based on Permutation and Spectral Entropy Measures. Appl. Sci. 2020, 10, 4666. https://0-doi-org.brum.beds.ac.uk/10.3390/app10134666
Sandoval D, Leturiondo U, Pozo F, Vidal Y. Low-Speed Bearing Fault Diagnosis Based on Permutation and Spectral Entropy Measures. Applied Sciences. 2020; 10(13):4666. https://0-doi-org.brum.beds.ac.uk/10.3390/app10134666
Chicago/Turabian StyleSandoval, Diego, Urko Leturiondo, Francesc Pozo, and Yolanda Vidal. 2020. "Low-Speed Bearing Fault Diagnosis Based on Permutation and Spectral Entropy Measures" Applied Sciences 10, no. 13: 4666. https://0-doi-org.brum.beds.ac.uk/10.3390/app10134666