Multi-Objective, Reliability-Based Design Optimization of a Steering Linkage



1
Department of Aeronautical Engineering, International Academy of Aviation Industry, King Mongkut’s Institute of Technology Ladkrabang, Bangkok 10520, Thailand
2
Sustainable and Infrastructure Development Center, Department of Mechanical Engineering, Faculty of Engineering, KhonKaen University, KhonKaen City 40002, Thailand
*
Author to whom correspondence should be addressed.
Appl. Sci. 2020, 10(17), 5748; https://0-doi-org.brum.beds.ac.uk/10.3390/app10175748
Submission received: 18 July 2020
/
Revised: 9 August 2020
/
Accepted: 13 August 2020
/
Published: 20 August 2020
(This article belongs to the Collection Heuristic Algorithms in Engineering and Applied Sciences)
Abstract
:Reliability-based design optimization (RBDO) of a mechanism is normally based on the non-probabilistic model, which is viewed as failure possibility constraints in each optimization loop. It leads to a double-loop nested problem that causes a computationally expensive evaluation. Several methods have been developed to solve the problem, which are expected to increase the realization of optimum results and computational efficiency. The purpose of this paper was to develop a new technique of RBDO that can reduce the complexity of the double-loop nested problem to a single-loop. This involves using a multi-objective evolutionary technique combined with the worst-case scenario and fuzzy sets, known as a multi-objective, reliability-based design optimization (MORBDO). The optimization test problem and a steering linkage design were used to validate the performance of the proposed technique. The proposed technique can reduce the complexity of the design problem, producing results that are more conservative and realizable.
1. Introduction
Uncertainties such as tolerance, backlash, and clearance can affect kinematic and dynamic characteristics of a mechanism, especially for a steering linkage [1]. In previous studies, the uncertain parameters affecting steering linkages have been quantified [1], while the robust design was an alternative for synthesis of the mechanism [2]. The first study presented an effective surrogate model for reliability analysis wherein it was extended to time-dependent reliability analysis [1]. Previous work applied the first-passage approach to handle the time-dependent reliability analysis [3]. In reliability analysis of mechanisms, it is difficult to collect the uncertainty data due to geometrical properties [4], flexible components [5], and joint clearance within the model [6]. The complete evaluation of uncertainty for all possible realizations of mechanism motion within a specific condition caused by the useable mechanism is needed [1]. Kinematic reliability analysis of steering mechanisms has been proposed for sensitivity analysis and optimization design [2]. An alternative method of reliability analysis is MonteCarlo simulation (MCS), which is computationally time-consuming. This kind of technique is called the probabilistic analysis. This technique is straightforward but requires thousands of analyses for an optimization run, which is impractical in most cases. As a result, to improve computational burden, the surrogate models as mentioned in many research papers [2,7] have been used to estimate function evaluations. Meanwhile, research in the field of topology optimization has been presented in [8], which depends on uncertainty of material properties, external loads, and other parameters. The uncertain parameters can result in impractical optimum design [9]. Recently, there are two main strategies to address the problem while accounting for uncertainties in topology optimization. The first technique is robust topology optimization (RTO) [10] and the second is reliability-based topology optimization (RBTO) [11]. The robustness or reliability can be based on the probabilistic model or non-probabilistic model [10]. The probabilistic model is a more popular choice than the non-probabilistic model due to its fast progress. Unfortunately, this model requires more precision of objective information to make the statistical distribution of uncertainties in the primary design stage similar with the robust design of mechanisms. On the other hand, the well-known examples of the second model are the convex set [12], the fuzzy set method [13], and anti-optimization with fuzzy set [14]. The fuzzy set model is a proven alternative selection method for collection of the uncertainties in optimization. This is because it provides moderate conservative results and it is acceptable and simple to combine with other techniques. Such techniques include anti-optimization [14] and a target performance-based design approach [9]. The disadvantage of the anti-optimization and fuzzy method is complexity in analysis due to the double-loop nested problem where optimization and anti-optimization are solved at the same time [14]. Similar to RBTO with a fuzzy set model, it causes triple-loop nested problems due to the additional topology optimization design stage. The complexity has been reduced by using the target performance-based design approach, which can reduce the triple-loop nested problem to a double-loop nested or single-loop problem [9,15]. Thus far, no technique can be applied to solve the nested problem of the reliability analysis optimization design of a steering linkage, and therefore our present work aimed to reduce the complexity of the double-loop nested problem in the reliability-based design optimization (RBDO) using a multi-objective optimization technique with the worst-case scenario and fuzzy uncertainties. Conventionally, RBDO and uncertainties can be categorized into two groups depending on uncertainty classification. They are aleatory uncertainty and epistemic uncertainty. The first one is caused by the randomness of a physical variation. On the other hand, the second one is due to the lack and incomplete of knowledge [16]. In general, the aleatory uncertainty is handled with the probabilistic model, but epistemic uncertainty is modeled with a convex set, a fuzzy set method, and anti-optimization [15].
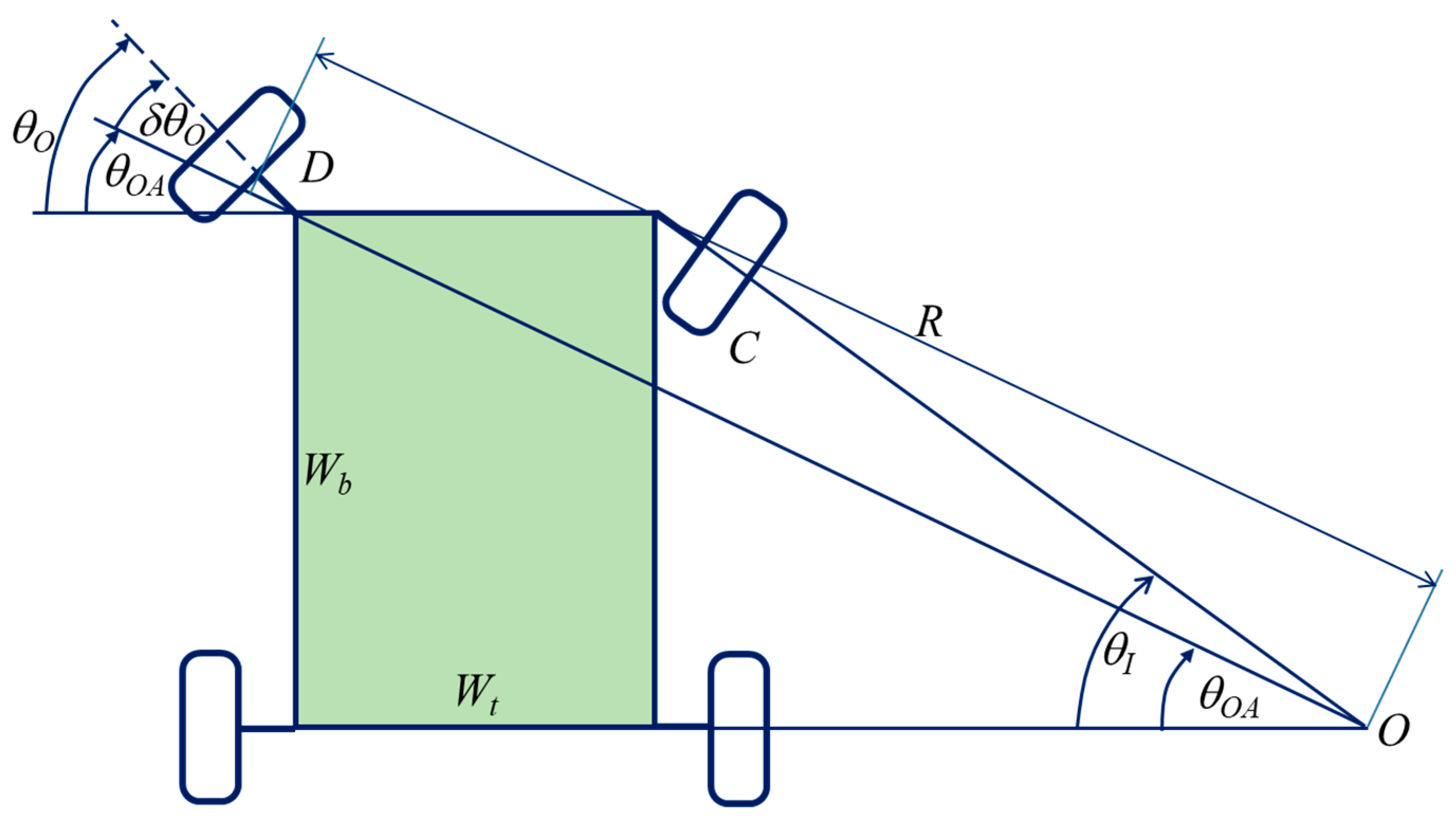
Next, state of the art steering linkage synthesis is introduced. A planar steering linkage works by applying a single input at a rack and pinion to drive two steering arms and tie rods as shown in Figure 1. It is a commonly used steering system in passenger cars, called a central take-off (CTO) type [2]. The design objective of this kind of mechanism is to avoid skidding and wear, which can be achieved by following the Ackermann principle. According to this principle, all lines passing the front wheel axle should meet at the line passing the rear axle, causing an instantaneous center, as shown in Figure 2. By using trigonometric relations, the outer wheel angle, θOA, can be expressed as a function of the inner front wheel angle, θI.
A steering error in form of Euclidean distance (EUD) can be defined by a distance deviation rather than angle distance (AD) that is defined in (2). The deviation distance of the instantaneous center of an actual steering mechanism and its theoretical value is a steering error [33], as shown in Figure 3.
From the figure, the trigonometric relation is used to formulate the steering error as
Then, the Euclidean distance of a steering error is defined as
where xO and xI are dimensionless.
This equation shows the steering error as a function of θO, θI, and a car geometric ratio Wt/Wb. Notice that the last term is smaller than 1 due to it being dependent on the geometry of a car. In the previous work, a proper value of a scaling factor (k) to minimize the steering error was proposed as [33]
The numerical experiment showed that common four-bar linkage cannot meet the design requirements of a steering linkage. Consequently, it leads to the use of the six-bar linkage [20,22,23,24,25]. The six-bar steering linkage is proposed to be the steering mechanism, which has an expectation to satisfy the Ackermann principle while it is better than the previous mechanism [26,27,28,29,30,31,32]. Nevertheless, it can fulfill the Ackermann principal for only some angles. The McPherson suspension is therefore combined with the steering linkage to achieve a high precision design [28,30,34]. A probability-based reliability technique increased the reliability and precision of the steering linkage design, as proposed in [1]. Furthermore, there are three coupling systems, including hub motor driving, differential assisted steering, and semi-active suspension systems of an electric vehicle used to study the performance enhancement of the integrated chassis system [33].
From the literature, the best objective function, constraint handling, and optimizer from the previous study in [33] are combined with a multi-objective optimization technique with the worst-case scenario and fuzzy uncertainties. The expectation is reduced complexity in the reliability-based steering linkage design and increased reliability of the design result.
The remainder of this paper starts with Section 2, preparing kinematic analysis, the steering errors, and the brief detail of the optimizer. Next, the multi-objective reliability-based design optimization technique (MRBDO) is proposed in Section 3. The simple test problem for validation of the proposed MRBDO is presented in Section 4, followed by a numerical experiment of reliability analysis of steering linkage, which is given in Section 5. The design results, and conclusions and discussions are in Section 6 and Section 7, respectively.
2. Optimization Design Problem Formulation
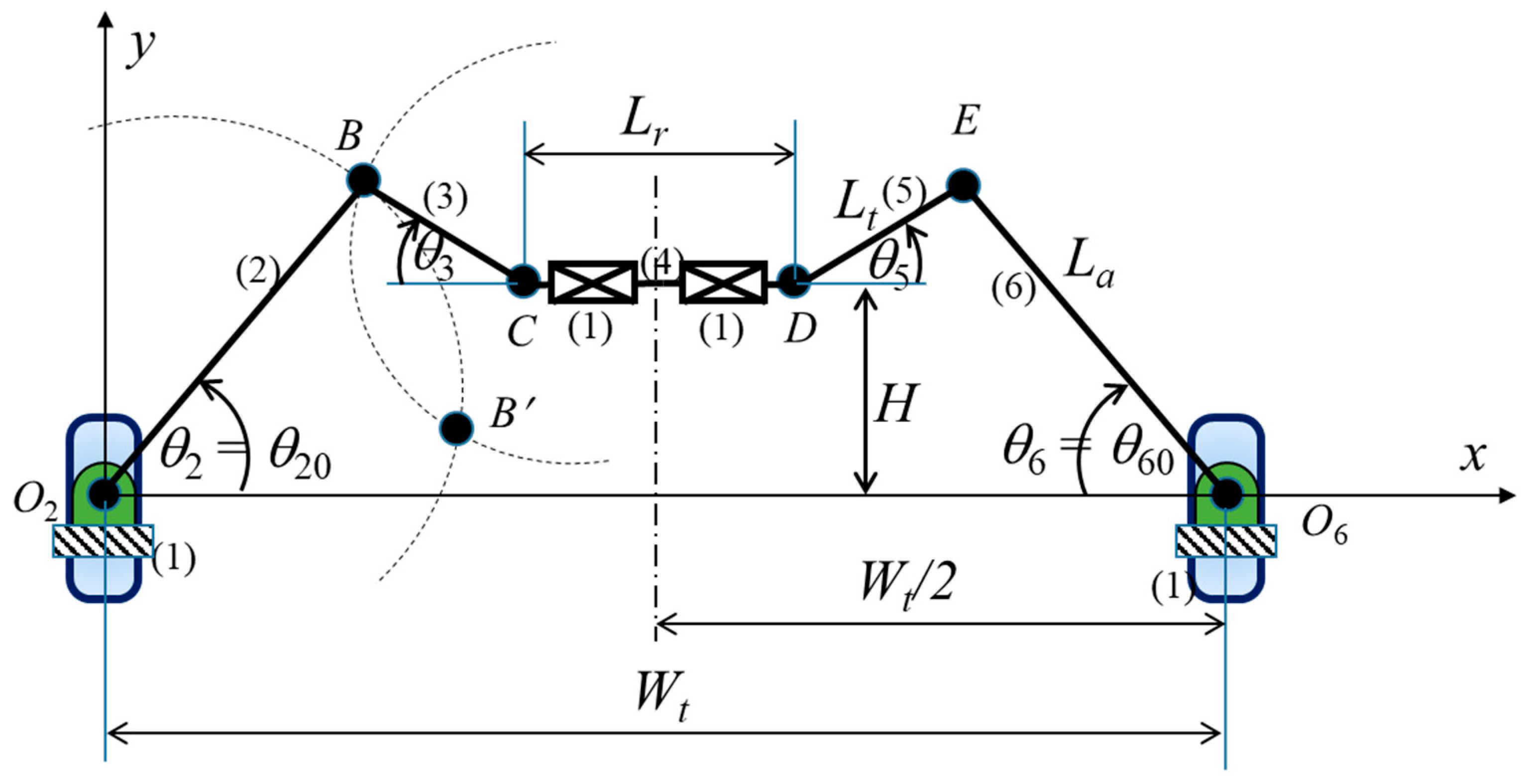
The multi-objective optimization problem of a six-bar steering linkage has been proposed in previous work [17]. The objective functions are derived from the side take-off model (STO) leading type, as shown in Figure 4. The combination of the drawing and mathematical techniques is used to define a connected point B of two circles with radius (steering arm length La, and tie rod length Lt) and known length (rack length Lr and is the off-set distance H). The changing position C caused by rack movements (b) can be formulated mathematically due to the shape changing of the linkage, which has been detailed in Sleesongsom and Bureerat [17].
In cases of the car turning right, the two circles traced by the steering arms and tie rods are intersected at two points B and B′:
and
where b is the displacement of a rack to the positive right-hand side, the center C (Cx2, Cy2) = (Wt/2 − Lb, H) and Lb = Lr/2 − b. This Lb value will be used for computing θ2 and θ3. In cases of turning left, θ5 and θ6 are computed by setting Lb =Lr/2 + b.
Rearranging (7) into and substituting into (8) forms a quadratic equation
where a2 = 1 − B2, a1 = −2CB, a0 = C2 − La2, , and .
The solutions of Equation (9) are
From Equation (7), if y1 and y2 are known, x1 and x2 can be computed.
The highest value between y1 and y2 are selected to be the solution. An initial angle on the left arm θ2 = θ20 is similar to the right arm θ6 = θ60 only in cases of the car moving in a straight motion. However, in Figure 4, the angles θ2, θ3, θ5, and θ6 have the trigonometric relations as follows:
and
where Lb = Lr/2 + b for θ5 and θ6, and Lb = Lr/2 − b for computing θ2 and θ3.
The outer wheel angle and inner front wheel angle are θO = θ20 − θ2, and θI = θ6 − θ60 = θ6 − θ20, respectively. Then, STE in Equation (6) is computed while the limiting position of steering linkage is our consideration to protect our design result from useless mechanisms [17,33,34].
2.1. Optimization Problems
A general optimization problem can be stated as
where i = 1 for single-objective optimization, i > 1 for multi-objective optimization, x is a vector of design variables, gi are inequality constraints, N is the number of inequality constraints, xi is a vector of lower bound limits, and xu is a vector of upper bound limits.
Min fi(x) i = 1, …, M
Subject to gi(x) ≤ 0, i = 1, …, N
xi ≤ x ≤ xu
xi ≤ x ≤ xu
From the new steering error, the optimization problem for steering linkage design is posed as
where the design variables are x = {La, Lt, H}T. In turning right/left of the car in range θI ∈ [0°, 40°], the computation of the steering error f should be less than or equal to 0.75. The value is defined follow in [33], which is in the interval [0,1]. The design constraints imposed in the problem (14) cause a narrow feasible region, as mentioned in [17,33]. The extension causes the feasible design domain being wider. The second last constraint is assigned for avoiding the steering linkage from limiting position [17,33]. All remaining constraints are assigned for the mechanism usability.
2.2. aRPBIL-DE
For the optimizer used in this study, it is an adaptation of the original hybridization of real-code population-based incremental learning and differential evolution (RPBIL-DE). The technique has been proposed in the design of a steering linkage [17]. The differential evolutionary (DE) reproduction is still DE/best/2/bin combined with the relaxation scheme, as shown in Figure 5, which leads to good results in solving a problem with a narrow feasible region [33]. The scheme starts with a car geometric ratio (Wt/Wb) of0.5586 and linearly decreases to k(Wt/Wb) at iteration 30 and becomes constant afterwards, where the best value is k = 0.4 [33]. Furthermore, the optimizer is combined with the opposition concept, which offers acceptable results [33]. The real code version of the population-based incremental learning(PBIL) uses a probability matrix to represent a real code population during its search. The element Pij of the probability matrix suggests the probability of xi being created from interval j of the nI equal-spaced intervals of the bounds of xi. For multi-objective optimization, many (say NT) probability matrices are used to increase population diversity; thus, each probability matrix is called a probability tray. The probability trays are used to create a population of design solutions iteratively. The obtained population is then further modified using the DE reproduction. In this work, the DE/best/2/bin scheme is used, which can be expressed as
where F ∈ [0.25, 0.75] is a scaling factor. q1, r1, q2, and r2 are randomly selected from the current real code population. The solution p is a solution in the Pareto archive and c is a resulting mutant solution. The binomial crossover is then performed on those mutant solutions, leading to a set of offspring. The combination of the offspring and the non-dominated solutions kept in the Pareto archive are sorted to find the new set of non-dominated solutions. Updating the probability matrices can be carried out by grouping the non-dominated solutions into NT groups and then finding the centroid rG of each group. A centroid is randomly chosen to update a probability matrix or probability tray as
where
where r is an interval in which the i-th element of rG is located.
c = p + F(q1 − r1) + F(q2 − r2)
The superscripts “old” and “new” stand for the previous and updated values of Pij, respectively. The procedure of this algorithm is shown in Algorithm 1. The variable pc is a crossover probability of DE, and CR is cross over ratio of an element of an offspring c, which is a binomial crossover.
| Algorithm 1. aRPBIL-DE |
| Input: Objective function name (fun), Pareto archive size (NA), number of generations (NG), population size (NP), number of probability matrix columns (nI), number of probability trays (NT) Output: Pareto front as fbest, xbest Initialization: For each tray, Pij = 1/nI Main steps : Finding f = fun(X), where X is generated from the probability trays in which it is a real code population : Generate a Pareto archive A by means of non-dominated sorting. 1: For i = 1 to NG 2: Separate the non-dominated solutions into NT groups using a clustering technique 3: Find a centroid rG of each group 4: Update each tray Pij using rG 4.1: Generate opposite learning rate OLR= 1 −LR 4.2: Choose LR= LR or OLR using binomial probability 4.3: Update each tray using Equation (17). 5: Generate X from the probability trays 6: For j = 1 to NP (recombine X and Pareto archive A using DE operators) 6.1: Randomly selects p from A 6.2: Randomly selects q and r from X, q ≠ r 6.3: Calculate mutation c by Equation (16). 6.4: Fit ci into its bound constraints. 6.5: If rand< pc, perform crossover 6.5.1: For k = 1 to n 6.5.2: If rand < CR, yk = ck 6.5.3: Else, yj,k = pk 6.5.4: End 7: End 8: Find f = fun(Y), where Y = {y1, …, yj, …, yNP} is a new real-code population 9: Perform Y∪A then find the new member in A with a non-dominated solution 10: If the member or size of A is larger than NA, remove some of the members using a clustering technique 11: End |
3. Multi-Objective, Reliability-Based Design Optimization Technique (MORBDO)
From the literature, an alternative technique to collect the uncertainties into RBDO was proposed. This is anti-optimization used to solve reliability-based design problem. Fuzzy set can be used to describe uncertainties with the help from experts’ opinions. In cases where uncertainty exists in the form of fuzzy variables a = (a1, a2, …, al), defining tolerance, backlash, clearance, etc., causes the constraints as a function of x and a. The constraints consist of inequality and bound constraints. Equality constraints, such as design symmetry, are not included directly in the design problem as they can be treated in the phase of design variable decoding. In reliability-based design with anti-optimization, all constraints should be given for the worst-case scenario or maximum possible (max (gi(x,a)). This means all constraints are bucketed to find the worst-case scenario. Then, the upper-level and lower-level optimum design problem is to be formulated as
Min fi(x) i = 1,…, M
If a simple optimization technique is used to solve the sub-problem (lower-level), only the maximization of the constraint should be solved N times at each step of modification of x in the upper level of Equation (18). The anti-optimization and fuzzy set cause the double-loop nested problem due to the need to solve optimization and anti-optimization problems at the same time [12,14]. This technique is well-known in the group of non-probabilistic approaches as the worst-case reliability where the intervals of uncertainties without accurate probability distributions [12,14] are pre-specified. A simple procedure for solving the nested optimization problem can be summarized as
- Step 1
- Assign an initial value ai(k) where k = 0 for a corresponding to each of inequality constraints gi(x,a) ≤ 0, i = 1, …, N.
- Step 2
- Solve problem (18) for fixed a = ai(k), for the ith constraint to obtain the optimal solution x(k).
- Step 3
- Fix x at x(k) and solve anti-optimization solution () to find ai(k) for each inequality constraint, and set k = k + 1.
- Step 4
- Return to Step 2 if the termination condition is not satisfied.
The procedure for solving the double-loop nested problem causes computationally expensive evaluation. In the past, several methods have been developed to solve the problem, expecting to increase computational efficiency. The present idea is to reduce the complexity of the double-loop nested problem in such a way to change the single-objective, reliability-based design optimization (18) to multi-objective, reliability-based design optimization problems. The interval of uncertainties using a fuzzy set model and an α-cut technique as one of the objective functions is also considered as follows
where WCSV is the worst-case scenario value.
Min {fi(x), −WCSV} i = 1,…, M
Subject to WCSV = max(gi(x,a)),
i = 1,…, Nxi ≤ x ≤ xu
i = 1,…, Nxi ≤ x ≤ xu
The complexity reduction herein means that the single-objective design problem (18) that requires a double loop optimization run is altered to the equivalent deterministic multi-objective problem in (19). With the proposed idea, any powerful multi-objective evolutionary algorithm (MOEA) can be used to solve the problem as MOEA can explore a Pareto front within one run. For the processing of fuzzy input values, the fuzzy set model is adopted with α-cut, which has been proposed in [13]. Furthermore, the new development technique can reduce the complexity of the double-loop nested problem to a single-loop one by using a multi-objective evolutionary technique that can find a solution set within one optimization run, being called the multi-objective, reliability-based design optimization (MORBDO).
From the present aim and the new technique, the traditional steering linkage optimization problem (15), in the previous section, can be changed to be the multi-objective, reliability-based design optimization problem using the worst-case scenario and fuzzy set model with the following explanation. The design constraints are imposed not to violate their predefined values. The uncertainties (a) are the tolerance of a steering arm length La and the tie rod-violated Lt, which are assumed to be fuzzy variables. The multi-objective reliability-based design optimization problem can be formulated as
and all constraints can be normalized with their allowable limits as follows
4. Test Problem
The proposed problem in this section is an analytical problem that several studies have tested with the evolutionary algorithms (EAs) [35]. In this research, a minimization problem of two variables, we selected torsion bar spring for testing the proposed method. The single objective problem was used to test MORBDO by adding the second objective function of the worst-case scenario function and fuzzy uncertainty. If the proposed technique worked well, the single solution would be included in the Pareto solution set, which is generated in accordance with the worst-case scenario and α-cut. The problem appropriates with testing new techniques, and the proposed optimization problem can be formulated as follows.
where d is the diameter of the torsion bar, lt is the length of torsion bar, ρ is the density of spring material, τmax is maximum shear stress, and δmax is maximum deflection.
The MORBDO test problem is solved with aRPBIL-DE for 10 instances, which specifies an initial setting of the algorithm with the population size of 60 and number of iterations being 180 while the Pareto archive size is 35. Other parameters of aRPBIL-DE are similar to those used in the previous studies [17,33]. The fuzzy set model was used in this study, and the triangular shape that the fuzzy variables produced were applied force (F), modulus of rigidity (G), and density of the spring material (ρ). The membership function values were F = (4400, 4500, 4600) N, G = (81, 82.7, 84) GPa, and ρ = (7700, 7800, 7900) kgm−3. The numerical experiment is shown in the following section, while the discussion is in the next sub-section.
4.1. Numerical Experimental Results and Discussions
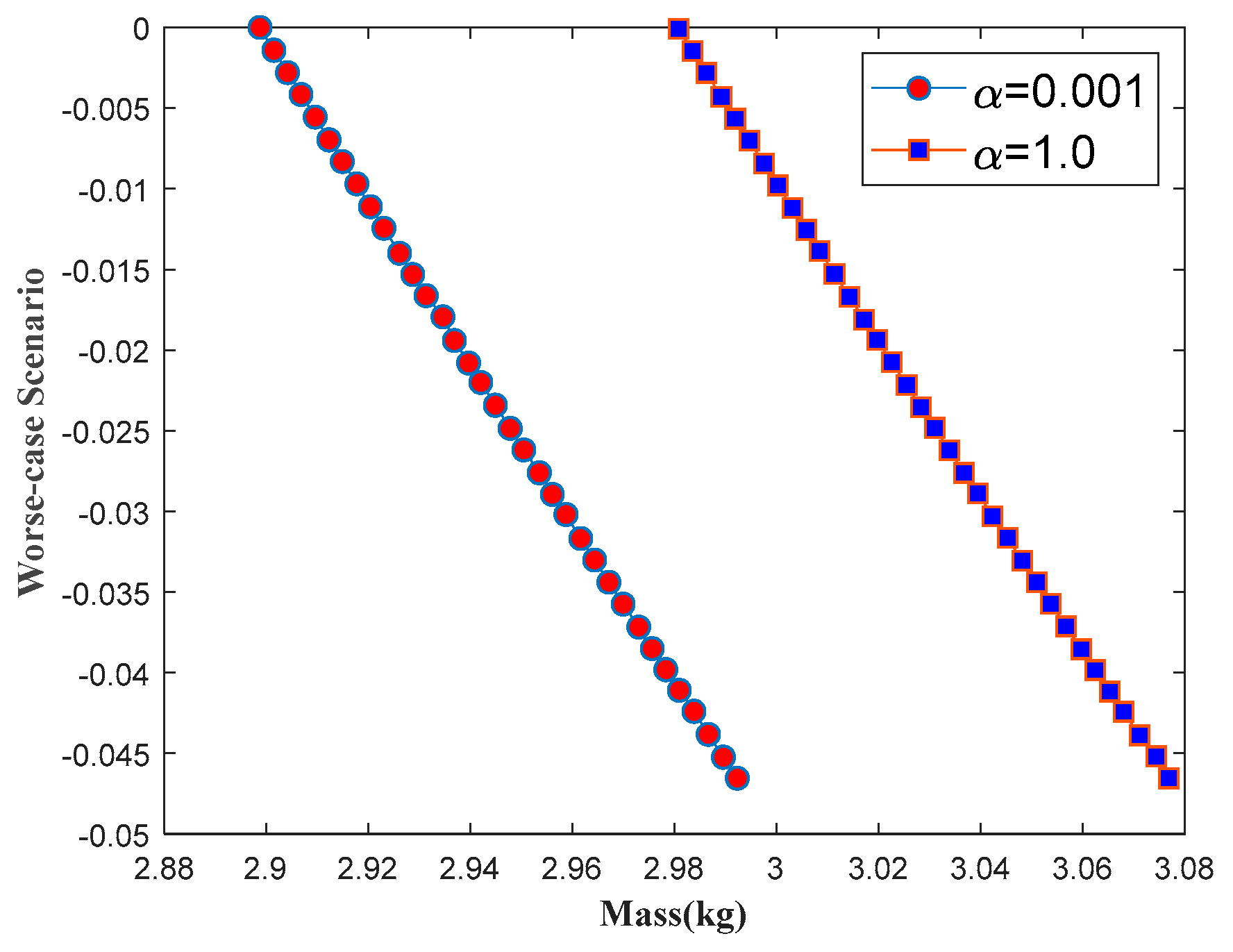
From the design demonstration, to solve the torsion bar spring optimization problem, we calculated the results, which are shown in Figure 6 and Table 1 at various α-cuts. The solution set with various α-cut = 1 and 0.001 are shown in Figure 6. The α-cut = 0.001, close to 0, represents the result of anti-optimization in cases of the convex set [12], while the deterministic design is the case of α-cut = 1. For the deterministic solution in cases of α-cut = 1.0, as shown in Figure 6 and Table 1 (first row), the result shows the optimum mass was2.981 kg at the highest worst-case scenario (−3.301 × 10−6), which was very close to the previous studies at2.988 kg (shown in the parenthesis) [35]. The present optimum design variables were lt = 1.06 m and d = 0.02142 m, which were close to the previous studies, as shown in the parentheses in the same table [35]. The result means the proposed MORBDO was validated. The deterministic solution can be a cause of minimum mass with highest worst-case scenario; on the other hand, the maximum mass is a cause of lowest worst-case scenario. The minimum mass and worst-case scenario vary in the direction of lower scenarios, meaning they are more conservative compared with higher values. The case of α-cut = 0.001 had a similar trend to the case of α-cut = 1.0. It was in the same picture, but it dominated the larger α-cut. The optimum mass and design variables at the highest worst-case scenario (−3.433 × 10−8) were 2.899 kg, lt = 1.06 m, and d = 0.02126 m, respectively. The larger α-cut was inferior to the smaller value due to lower mass. Thus, it was safer than the higher mass within the same interval of maximum shear stress and maximum deflection constraints. It promoted the solution set to depend on the worst-case scenario and the level of α-cut.
4.2. Conclusion of Testing Problem
The proposed MORBDO with worst-case scenario and fuzzy set model can reduce complexity due to the double-loop nested problem by changing the single objective design optimization into a multi-objective design optimization by considering the worst-case scenario that is one of the objectives. The torsion bar problem demonstrates the validity of the present technique. The results show the proposed technique, which leads to a more conservative and realizable design result, is simpler than the previous technique used in reliability optimization. The designer can add experience to select a more conservative solution from the solution set by considering the worst-case scenario value. Furthermore, uncertainty can be added to the optimization problem (19) by using the fuzzy set technique [13]. Moreover, user experience can be used to collect uncertainties into the design problem passing to the level of α-cut. The proposed technique is now ready to be applied for solving the steering linkage design.
5. Numerical Experiment
The proposed MORBDO in Section 3 of this research was applied for solving reliability design of a steering linkage. The MORBDO problem of the steering linkage design is formulated in Equations (18) and (19), which is solved with aRPBIL-DE, where the population size is 50, the iteration number is 80, and the Pareto archive size is 30. The optimization problem is to find the optimal dimensions of a rack-and-pinion steering linkage, which can minimize the steering error and worst-case scenario values. Another dimension is Lr = 678 mm, while the geometry dimensions of the car are Wb = 2175 mm and Wt = 1215. The performance indicator, in this study, is a hyper volume indicator (HV). The reference point {f1, f2} = {1, 2.0} is used for computing the hyper volume indicator. The fuzzy set model in this study is a triangular shape in which the fuzzy variables are the tolerance of the steering arm length La and the tie rod length Lt, denoted as eLa and eLr, respectively. The membership function values of the tolerance are eLa = eLr = (−0.2, 0, 0.2) mm. The proposed method solves the optimization problem for 30 iterations using different α-cutsof1.0, 0.5, and 0.001. The experimental results are shown in the following section, while the discussion is presented in Section 7.
6. Numerical Experimental Results
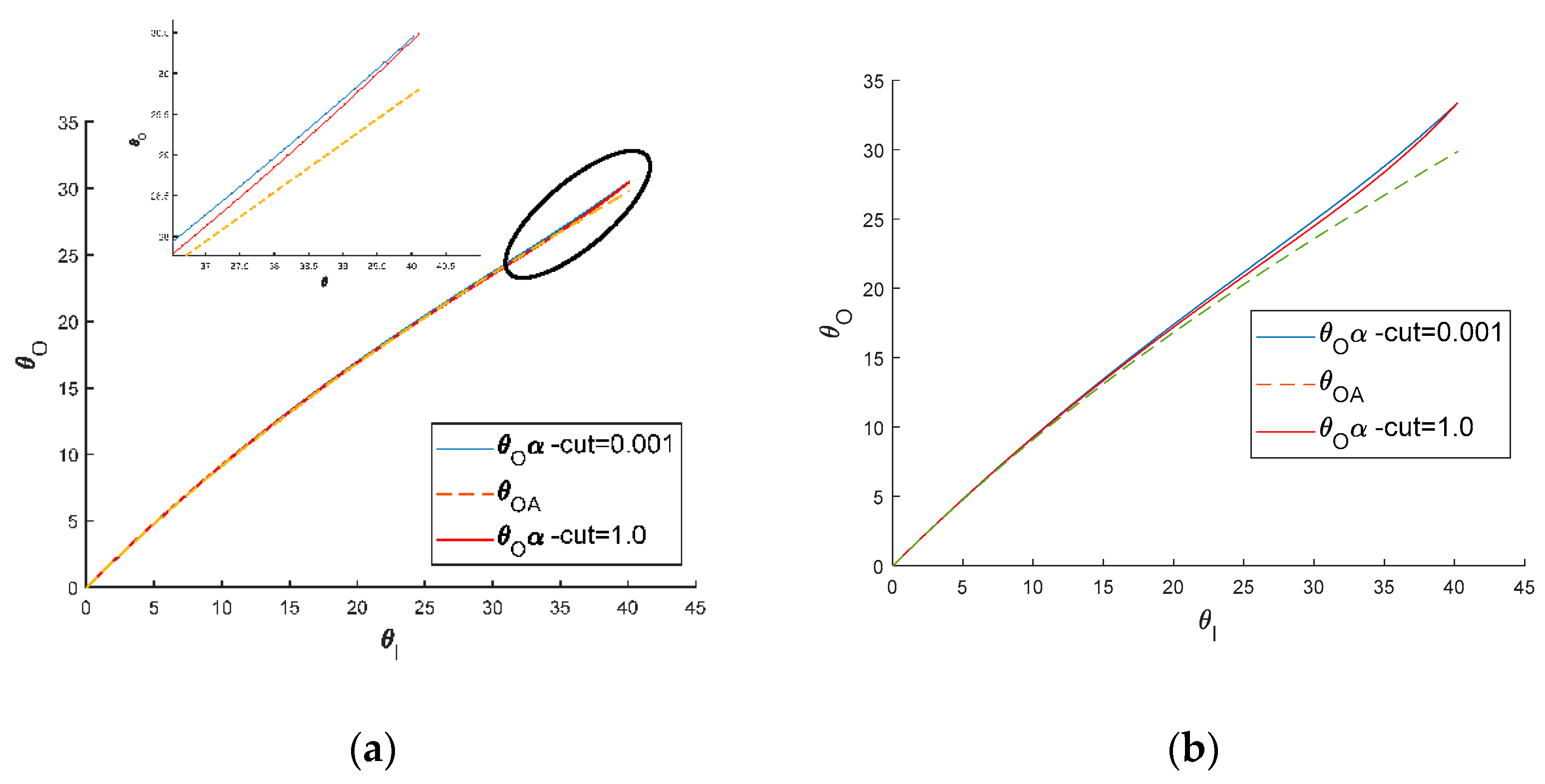
The MORBDO problem was solved for 30 runs with α-cut = 1.0, 0.5, and 0.001, and the obtained statistical results are shown in Table 2. The average computational times for each optimization run and α-cut were slightly different in terms of running time, as shown in Table 2. The new technique spends only a few second in solving the problem. The plot of the best Pareto frontier is shown in Figure 7. Some selected solutions were obtained from clustering [36] and shown in Figure 8. The minimum steering error was0.03043, with the maximum worst-case scenario being 0.5867 at the parameter bound of α-cut = 1.0. The maximum steering error obtained was0.2232, with the maximum worst-case scenario (WCSV) being −3.673 at the parameter bound of the same α-cut. The steering error was0.05463, which was close to zero at α-cut = 1.0, representing the deterministic optimum solution, which provided the WCSV as −0.05887. According to the mean value of hyper volume (HV) in Table 2, the highest value represented the best front. It can be concluded that the best front to worst wereα-cut = 1.0, then 0.5, and finally 0.001. From the results, the lower HV meant more reliable solutions. The Pareto frontier represents various solutions obtained from using different α-cuts. The fronts depended on the WCSVs and the level of α-cuts. The best and worst of the steering errors were solutions with plots of ideal (θOA) versus actual (θO) angles at α-cut = 0.001 (solution 2 and 9 of the most reliable front in Figure 9). From the figure, the result shows the worst steering error, but it was also the most reliable. To re-examine the results of the proposed technique depending on α-cuts, we selected the plot as the ideal (θOA) versus actual (θO) angles of solution 2 with very high value of α-cut. Figure 10a shows that the steering error increased as the level of α-cut =1 decreased. A similar took takes place for solution 9, as shown in Figure 10b.
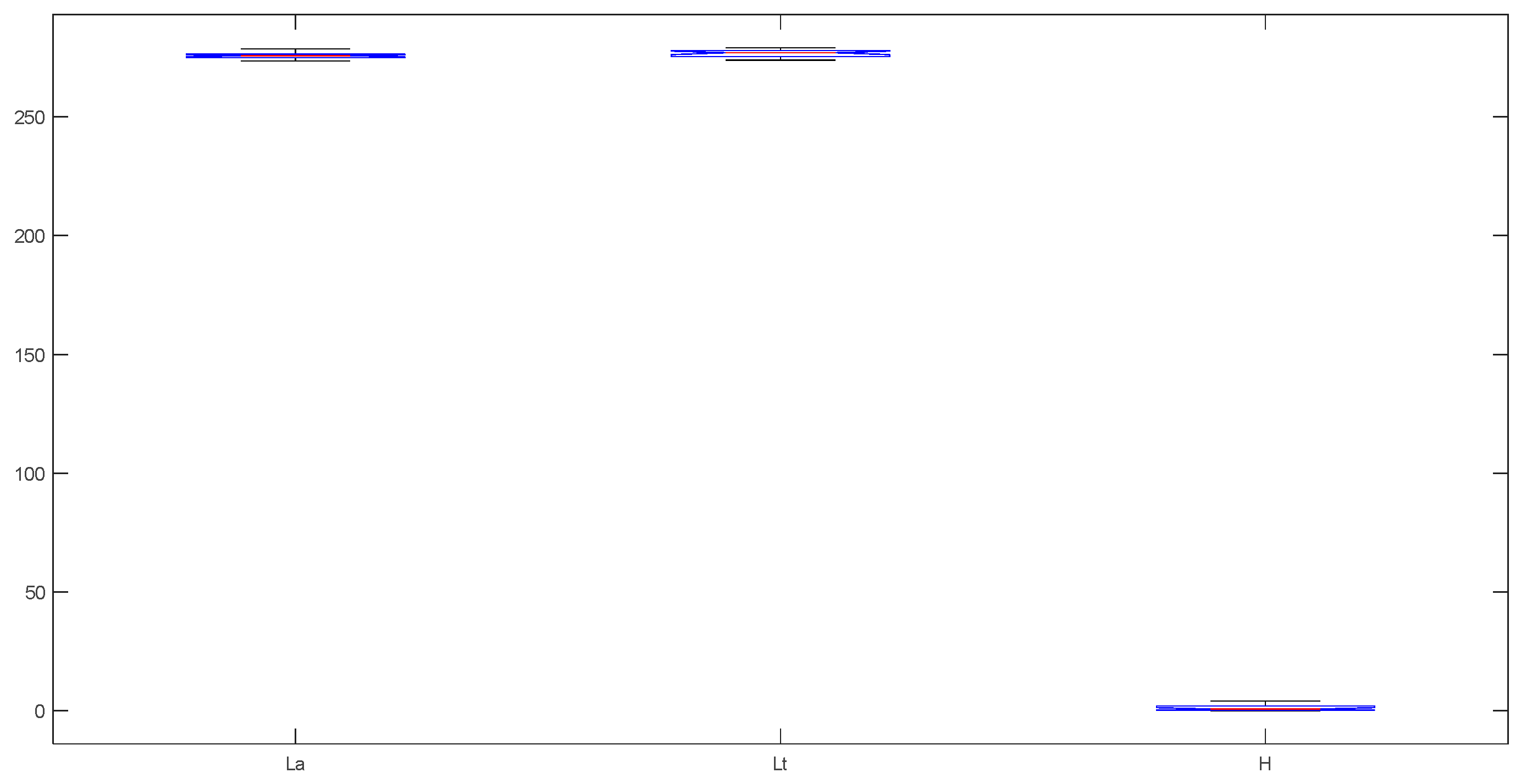
Figure 11, Figure 12 and Figure 13 show the boxplots of distribution design parameters where the central mark indicates the median and the bottom and top edges of the box show the 25% and 75% percentiles, respectively. The whiskers extended to the most extreme data points do not consider outliers, and the outliers are plotted individually using the “+” symbol. Figure 8 shows some selected solutions while Figure 14 shows a corresponding steering linkage kinematic diagram of solution number 1. The various linkages were indifferent because of the design constraints imposed in problem (18) caused by the narrow feasible solution as mentioned in [17]. The mechanisms may have similar shapes but they have different dimensions, as shown in Figure 11, Figure 12 and Figure 13. Such differences affect the results of the worse-case scenario value. A designer can select the conservative solution, which provides a compromise between the steering error and worse-case scenario value due to uncertainties. The motion of a steering linkage of solution number 1 in Figure 8 is illustrated in Figure 14. It can promote the designed steering linkage to work well.
7. Conclusions and Discussion
In this paper, a novel multi-objective, reliability-based design optimization was proposed for the reliability-based design of a steering linkage with tolerances of link length. The idea was to reduce the complexity of the traditional reliability design optimization problem, which is a double-loop nested problem. The proposed technique works by using a method of changing the single-objective optimization to a multi-objective optimization problem and to consider the interval of uncertainties using a fuzzy set model and the α-cut technique as an additional objective function. Then, the new problem is solved by a multi-objective evolutionary optimization algorithm (MOEA). The obtained Pareto solutions have several levels of reliability in the form of worst-case scenario that are ready to use in one optimization run. The proposed technique can reduce the complexity of the reliability-based design optimization problem of a steering linkage with a very simple algorithm. The proposed method can help designers or users in adding experience in selection of the compromise solutions and the level of uncertainty for their applications by a method of the worst-case scenario value and α-cut level. The present results reveal that the proposed technique gives more reliable results than the deterministic design problem. For future work, due to the efficiency of the proposed technique, it will be extended to solve the optimization problems of aircraft mechanisms and structures.
Author Contributions
S.S. and S.B. setup and designed the numerical experiments; S.S. performed the numerical experiments; S.S. and S.B. analyzed the data; S.S. wrote the paper. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by King Mongkut’s Institute of Technology Ladkrabang grant number [KREF016106]; the Thailand Research Fund [RTA6180010]; and the Post-Doctoral Program from Research Affairs, Graduate School, KhonKaen University [58225].
Acknowledgments
The authors are grateful for the financial support provided by King Mongkut’s Institute of Technology Ladkrabang (KREF016106); the Thailand Research Fund (RTA6180010); and the Post-Doctoral Program from Research Affairs, Graduate School, KhonKaen University (58225).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Wang, L.; Zhang, X.; Zhou, Y. An effective approach for kinematic reliability analysis of steering mechanisms. Reliab. Eng. Syst. Safe 2018, 180, 62–76. [Google Scholar] [CrossRef]
- Hanzaki, A.R.; Rao, P.V.M.; Saha, S.K. Kinematic and sensitivity analysis and optimization of planar rack-and-pinion steering linkages. Mech. Mach. Theory 2009, 44, 42–56. [Google Scholar] [CrossRef]
- Shang, J.; Wang, J.; Du, X. Time-dependent probabilistic synthesis for function generator mechanisms. Mech. Mach. Theory 2011, 46, 1236–1250. [Google Scholar]
- Batou, A.; Soize, C. Rigid multibody system dynamics with uncertain rigid bodies. Multibody Syst. Dyn. 2012, 27, 285–319. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.X.; Wang, Y.H.; He, B.Y. Dynamic modelling of flexible multibody systems with parameter uncertainty. Chaos Soliton Fract. 2008, 36, 605–611. [Google Scholar] [CrossRef]
- Sun, D.; Shi, Y.; Zhang, B. Robust optimization of constrained mechanical system with joint clearance and random parameters using multi-objective particle swarm optimization. Sruct. Multidiscip. Optim. 2018, 58, 2073–2084. [Google Scholar] [CrossRef]
- Wansaseub, K.; Sleesongsom, S.; Panagant, N.; Pholdee, N.; Bureerat, S. Surrogate-Assisted Reliability Optimisation of an Aircraft Wing with Static and Dynamic Aeroelastic Constraints. Int. J. Aeronaut. Space 2020, 1–10. [Google Scholar] [CrossRef]
- Sleesongsom, S.; Bureerat, S. Topology Optimisation Using MPBILs and Multi-Grid Ground Element. Appl. Sci. 2018, 8, 271. [Google Scholar] [CrossRef] [Green Version]
- Yin, H.; Yu, D.; Xia, B. Reliability-based topology optimization for structures using fuzzy set model. Comput. Methods Appl. Mech. Eng. 2018, 333, 197–217. [Google Scholar] [CrossRef]
- Dunning, P.; Kim, H. Robust topology optimization: Minimization of expected and variance of compliance. AIAA J. 2013, 51, 2656–2664. [Google Scholar] [CrossRef] [Green Version]
- Kharmanda, G.; Olhoff, N.; Mohamed, A.; Lemaire, M. Reliability-based topology optimization. Struct. Multidiscip. Optim. 2004, 26, 295–307. [Google Scholar] [CrossRef]
- Elishakoff, I.; Colombi, P. Combination of probabilistic and convex models of uncertainty when scare knowledge is present on acoustic excitation parameters. Conput. Methods Appl. Mech. Eng. 1993, 104, 187–209. [Google Scholar] [CrossRef]
- Moller, B.; Graf, W.; Beer, M. Fuzzy structural analysis using α-level optimization. Comput. Mech. 2000, 26, 547–565. [Google Scholar] [CrossRef]
- Fang, J.; Smith, S.M.; Elishakoffk, I. Combination of anti-optimization and fuzzy-set-based analyses for structural optimization under uncertainty. Math. Prob. Eng. 1998, 4, 187–200. [Google Scholar] [CrossRef] [Green Version]
- Sleesongsom, S.; Bureerat, S. Multi-Objective Reliability-Based Topology Optimization of Structures Using a Fuzzy Set Model. J. Mech. Sci. Technol. 2020, 1–8. [Google Scholar] [CrossRef]
- Meng, Z.; Pang, Y.; Pu, Y.; Wang, X. New Hybrid Reliability-Based Topology Optimization Method Combining Fuzzy and Probabilistic Models for Handling Epistemic and Aleatory Uncertainties. Comput. Methods Appl. Mech. Eng. 2020, 363, 112886. [Google Scholar] [CrossRef]
- Sleesongsom, S.; Bureerat, S. Multiobjective optimization of a steering linkage. J. Mech. Sci. Technol. 2016, 30, 3681–3691. [Google Scholar] [CrossRef]
- Simionescu, P.A.; Beale, D. Optimum synthesis of the four-bar function generator in its symmetric embodiment: The Ackermann steering linkage. Mech. Mach. Theory 2002, 37, 1487–1504. [Google Scholar] [CrossRef]
- Showers, A.; Lee, H.H. Design of the steering system of an SELU Mini Baja car. Int. J. Eng. Res. Tech. 2013, 2, 2396–2400. [Google Scholar]
- Zhao, J.S.; Liu, X.; Feng, Z.J.; Dai, J.S. Design of an Ackermann-type steering mechanism. J. Mech. Eng. Sci. 2013, 227, 2549–2562. [Google Scholar] [CrossRef]
- Ettefagh, M.M.; Javash, M.S. Optimal synthesis of four-bar steering mechanism using AIS and genetic algorithms. J. Mech. Sci. Technol. 2014, 28, 2351–2362. [Google Scholar] [CrossRef]
- Peñuñuri, F.; Peón-Escalante, R.; Villanueva, C.; Pech-Oy, D. Synthesis of mechanisms for single and hybrid tasks using differential evolution. Mech. Mach. Theory 2011, 46, 1335–1349. [Google Scholar] [CrossRef]
- Simionescu, P.A.; Smith, M.R.; Tempea, I. Synthesis and analysis of the two loop translational input steering mechanism. Mech. Mach. Theory 2000, 35, 927–943. [Google Scholar] [CrossRef]
- Carcaterra, A.; D’Ambrogio, A. Function generating differential mechanism for an exact solution of the steering problem. Mech. Mach. Theory 1998, 33, 535–549. [Google Scholar] [CrossRef]
- Simionescu, P.A.; Smith, M.R. Applications of Watt II function generator cognates. Mech. Mach. Theory 2000, 35, 1535–1549. [Google Scholar] [CrossRef]
- Simionescu, P.A.; Smith, M.R. Four- and six-bar function cognates and over constrained mechanism. Mech. Mach. Theory 2001, 36, 913–924. [Google Scholar] [CrossRef]
- Zarak, C.E.; Townsend, M.A. Optimal design of rack-and-pinion steering linkages. J. Mech. Des. 1983, 105, 220–226. [Google Scholar] [CrossRef]
- Felzien, M.L.; Cronin, D.L. Steering error optimization of the McPherson strut automotive front suspension. Mech. Mach. Theory 1985, 20, 17–26. [Google Scholar] [CrossRef]
- Simionescu, P.A.; Smith, M.R. Initial estimates in the design of rack-and-pinion steering linkages. J. Mech. Des. 2000, 122, 194–200. [Google Scholar] [CrossRef]
- Zhou, B.; Li, D.; Yang, F. Optimization design of steering linkage in independent suspension based on genetic algorithm. In Proceedings of the Computer-Aided Industrial Design and Conceptual Design, Wenzhou, China, 26 November 2009; pp. 45–48. [Google Scholar]
- Kim, S.I.; Kim, Y.Y. Topology optimization of planar linkage mechanisms. Int. J. Num. Methods Eng. 2014, 98, 265–286. [Google Scholar] [CrossRef]
- Bendefy, A.G.; Piros, A.; Hora’k, P. Arbitrary vehicle steering characteristics with changing ratio rack and pinion transmission. Advan. Mech. Eng. 2015, 7, 1–12. [Google Scholar] [CrossRef]
- Sleesongsom, S.; Bureerat, S. Multi-objective optimization of a steering linkage using alternative objective functions. Lect. Notes Comput. 2019, 11656, 47–58. [Google Scholar]
- Sleesongsom, S.; Bureerat, S. Optimization of steering linkage including the effect of McPherson strut front suspension. Lect. Notes Comput. 2018, 10941, 612–623. [Google Scholar]
- Rajendran, I.; Vijayarangan, S. Simulated annealing approach to the optimal design of automotive suspension systems. Int. J. Veh. Des. 2007, 43, 11–30. [Google Scholar] [CrossRef]
- Sleesongsom, S. Multiobjective optimization with even Pareto filter. In Proceedings of the Natural Computation, Jinan, China, 18 October 2008; pp. 92–96. [Google Scholar]
Figure 1.
Central take-off planar steering linkage schemes (reproduced from [17]).
Figure 1.
Central take-off planar steering linkage schemes (reproduced from [17]).

Figure 2.
Ackermann principle in the form of an angle distance (AD) (reproduced from [17]).
Figure 2.
Ackermann principle in the form of an angle distance (AD) (reproduced from [17]).

Figure 3.
Ackermann principle in the form of Euclidean distance (reproduced from [17]).
Figure 3.
Ackermann principle in the form of Euclidean distance (reproduced from [17]).

Figure 4.
Six-bar steering linkage configuration (reproduced from [17]).
Figure 4.
Six-bar steering linkage configuration (reproduced from [17]).

Figure 5.
Scheme of constraint handling (reproduced from [17]).
Figure 5.
Scheme of constraint handling (reproduced from [17]).

Figure 6.
Pareto frontier of the testing problem in case of α-cut = 1.0 and 0.001.

Figure 7.
The best Pareto frontier of the test problem at each α-cut = 1.0, 0.5, and 0.001.

Figure 8.
Selected solutions of α-cut = 0.001.

Figure 9.
Ideal (θOA) versus actual (θO) of α-cut = 0.001 in Figure 8 at (a) solution number 1 and (b) solution number 9.
Figure 9.
Ideal (θOA) versus actual (θO) of α-cut = 0.001 in Figure 8 at (a) solution number 1 and (b) solution number 9.

Figure 10.
Compare ideal (θOA) versus actual (θO) of α-cut = 1.0 and 0.001 (a) at solution number 2 and (b) at solution number 9.
Figure 10.
Compare ideal (θOA) versus actual (θO) of α-cut = 1.0 and 0.001 (a) at solution number 2 and (b) at solution number 9.

Figure 11.
Link dimension distribution in Figure 7 at α-cut = 1.0.
Figure 11.
Link dimension distribution in Figure 7 at α-cut = 1.0.

Figure 12.
Link dimension distribution in Figure 7 at α-cut = 0.5.
Figure 12.
Link dimension distribution in Figure 7 at α-cut = 0.5.

Figure 13.
Link dimension distribution in Figure 7 at α-cut = 0.001.
Figure 13.
Link dimension distribution in Figure 7 at α-cut = 0.001.

Figure 14.
Motion of selected solution number 1 from Figure 8.
Figure 14.
Motion of selected solution number 1 from Figure 8.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Optimum results of testing problem.
| α-Cut | Mass(kg) | Worst-Case Scenario | lt(m) | d(m) |
|---|---|---|---|---|
| 1.0 | 2.981(2.988) | −3.301 × 10−6 | 1.06(1.0613) | 0.02142(0.021439) |
| 0.001 | 2.899 | −3.433 × 10−8 | 1.06 | 0.02126 |
Numbers in the brackets are reference values from the literature.
Table 2.
Statistical results of the hyper volume (HV) of Pareto front explored 30 times of each α-cut.
Table 2.
Statistical results of the hyper volume (HV) of Pareto front explored 30 times of each α-cut.
| α-Cut | |||
|---|---|---|---|
| Run No. | 1.0 | 0.5 | 0.001 |
| 1 | 5.066174 | 4.158105 | 4.284616 |
| 2 | 5.051079 | 4.126069 | 4.277084 |
| 3 | 5.056115 | 4.247698 | 5.058315 |
| 4 | 5.043008 | 4.290069 | 5.054025 |
| 5 | 5.045264 | 4.141069 | 5.045609 |
| 6 | 4.290033 | 5.006481 | 4.240209 |
| 7 | 5.079538 | 4.854905 | 4.288664 |
| 8 | 5.052285 | 5.052389 | 4.19149 |
| 9 | 5.051431 | 4.15567 | 4.300989 |
| 10 | 4.161903 | 5.042506 | 4.241751 |
| 11 | 4.253938 | 4.298783 | 4.203374 |
| 12 | 5.032674 | 5.042374 | 5.050284 |
| 13 | 5.027805 | 5.055919 | 5.037099 |
| 14 | 4.189547 | 5.05176 | 4.164782 |
| 15 | 4.237933 | 5.046624 | 5.022785 |
| 16 | 4.175652 | 4.995841 | 4.139047 |
| 17 | 4.521695 | 4.092045 | 4.14776 |
| 18 | 5.057379 | 5.020872 | 4.928825 |
| 19 | 4.27786 | 5.035243 | 5.072948 |
| 20 | 4.275593 | 5.020993 | 5.054774 |
| 21 | 5.046283 | 5.050801 | 4.209428 |
| 22 | 4.277916 | 5.06729 | 4.174455 |
| 23 | 5.044394 | 4.318736 | 4.299731 |
| 24 | 5.056115 | 4.293151 | 5.055291 |
| 25 | 5.043182 | 4.137739 | 4.140307 |
| 26 | 4.299385 | 5.05099 | 4.183888 |
| 27 | 4.24817 | 4.26215 | 4.189787 |
| 28 | 5.06743 | 4.260298 | 4.163459 |
| 29 | 5.04816 | 4.190303 | 4.273105 |
| 30 | 5.053877 | 4.91295 | 4.183501 |
| Mean | 4.737727 | 4.642661 | 4.489246 |
| Min | 4.161903 | 4.092045 | 4.139047 |
| Max | 5.079538 | 5.06729 | 5.072948 |
| STD | 0.394746 | 0.41472 | 0.397889 |
| Comp. Time a (s) | 25.586207 | 23.103448 | 20.689655 |
a Computational time from 30 runs.
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Sleesongsom, S.; Bureerat, S. Multi-Objective, Reliability-Based Design Optimization of a Steering Linkage. Appl. Sci. 2020, 10, 5748. https://0-doi-org.brum.beds.ac.uk/10.3390/app10175748
AMA Style
Sleesongsom S, Bureerat S. Multi-Objective, Reliability-Based Design Optimization of a Steering Linkage. Applied Sciences. 2020; 10(17):5748. https://0-doi-org.brum.beds.ac.uk/10.3390/app10175748
Chicago/Turabian StyleSleesongsom, Suwin, and Sujin Bureerat. 2020. "Multi-Objective, Reliability-Based Design Optimization of a Steering Linkage" Applied Sciences 10, no. 17: 5748. https://0-doi-org.brum.beds.ac.uk/10.3390/app10175748
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.