Short Term Traffic Flow Prediction of Urban Road Using Time Varying Filtering Based Empirical Mode Decomposition

Abstract
:1. Introduction
2. Methods
2.1. Time Varying Filtering Based Empirical Mode Decomposition
2.1.1. Estimation of the Local Cut-Off Frequency
2.1.2. Calculation of Local Mean Function
2.1.3. Judgement of the Residual Signal
2.2. Least Square Support Vector Machine
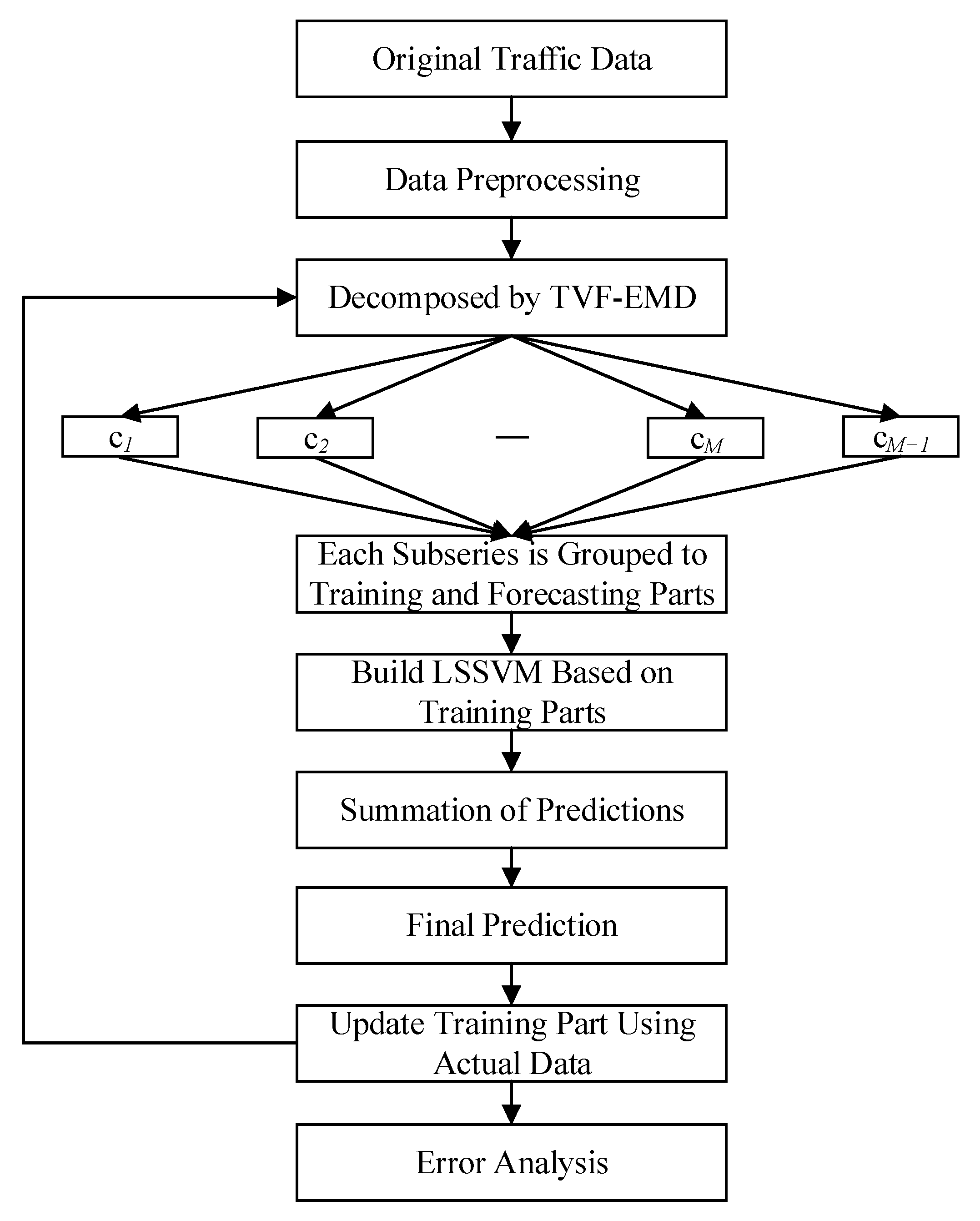
2.3. The Proposed Method
3. Case Study
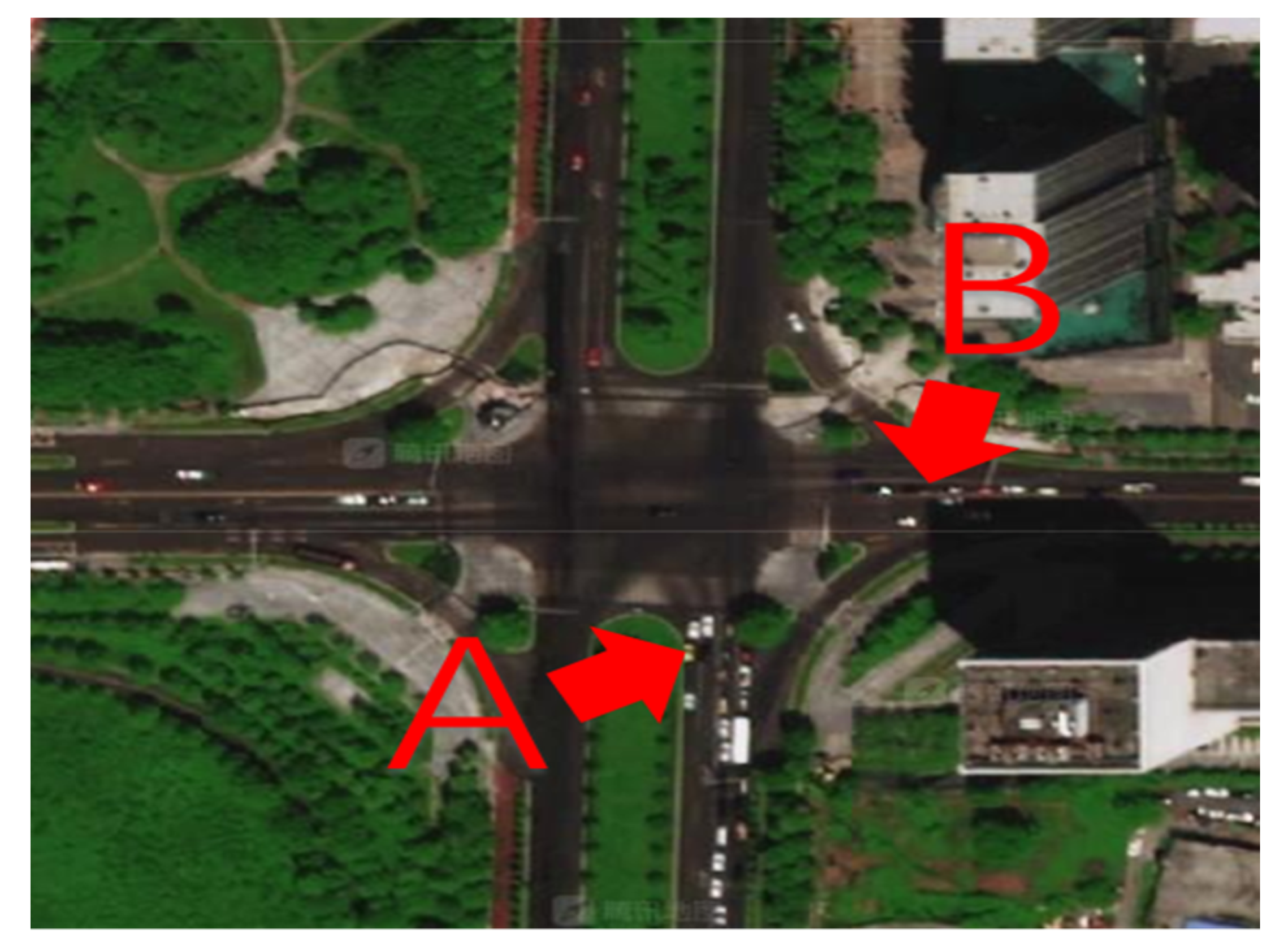
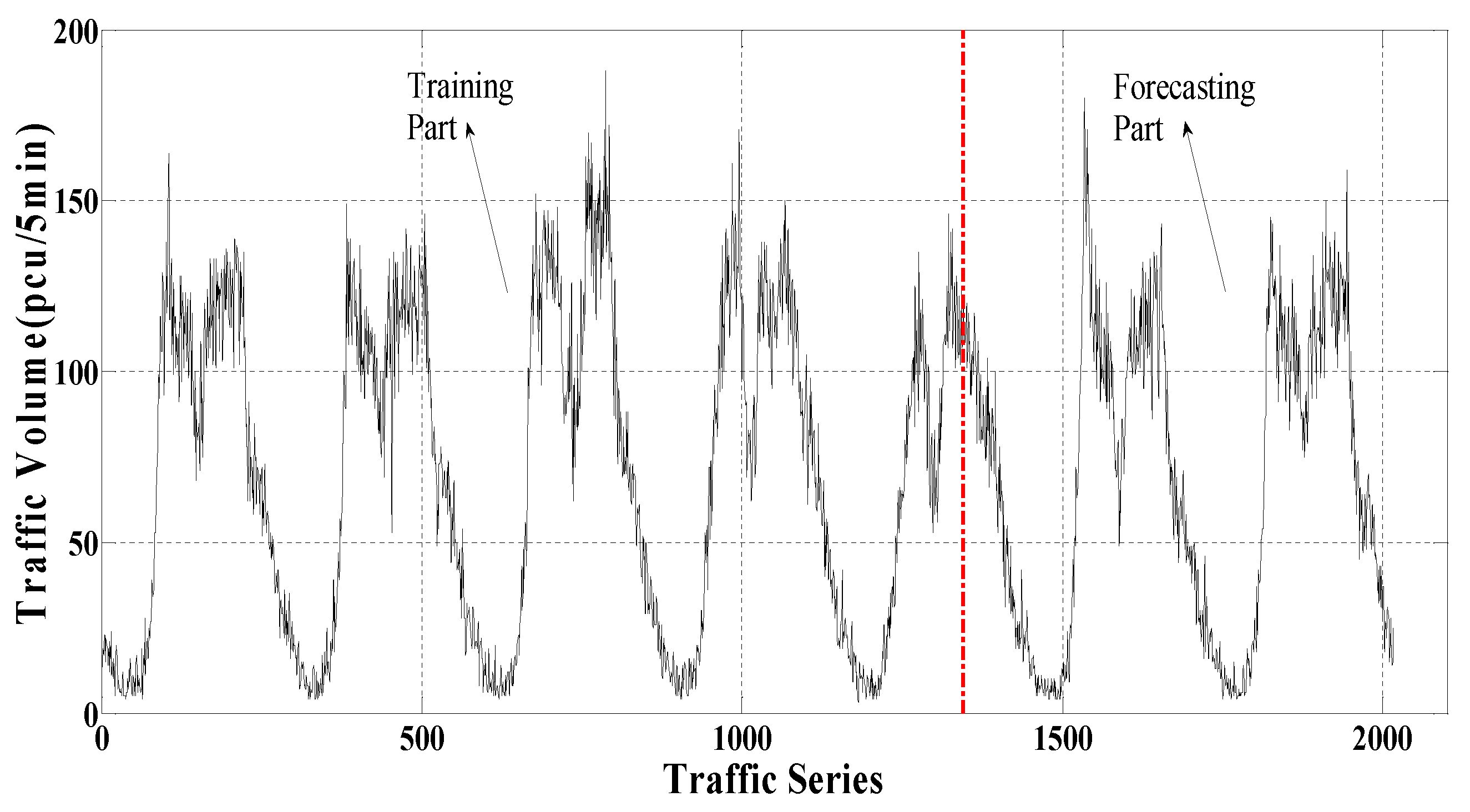
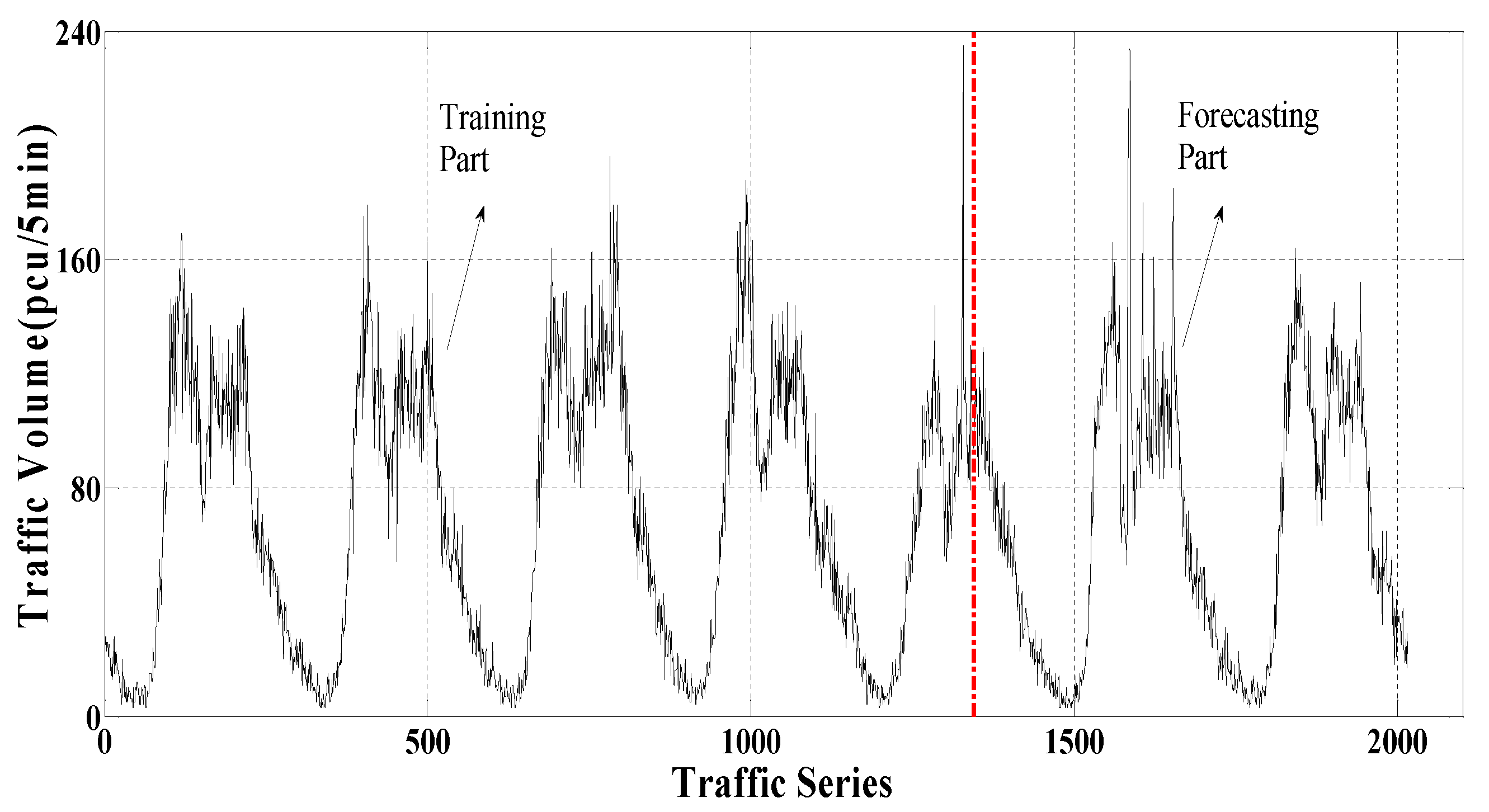
3.1. Data Description
3.2. Data Processing
3.3. Evaluation Criteria
3.4. Prediction Results and Analysis
3.4.1. TVF-EMD-LSSVM Model Prediction
3.4.2. Comparison and Analysis of Forecasting Results
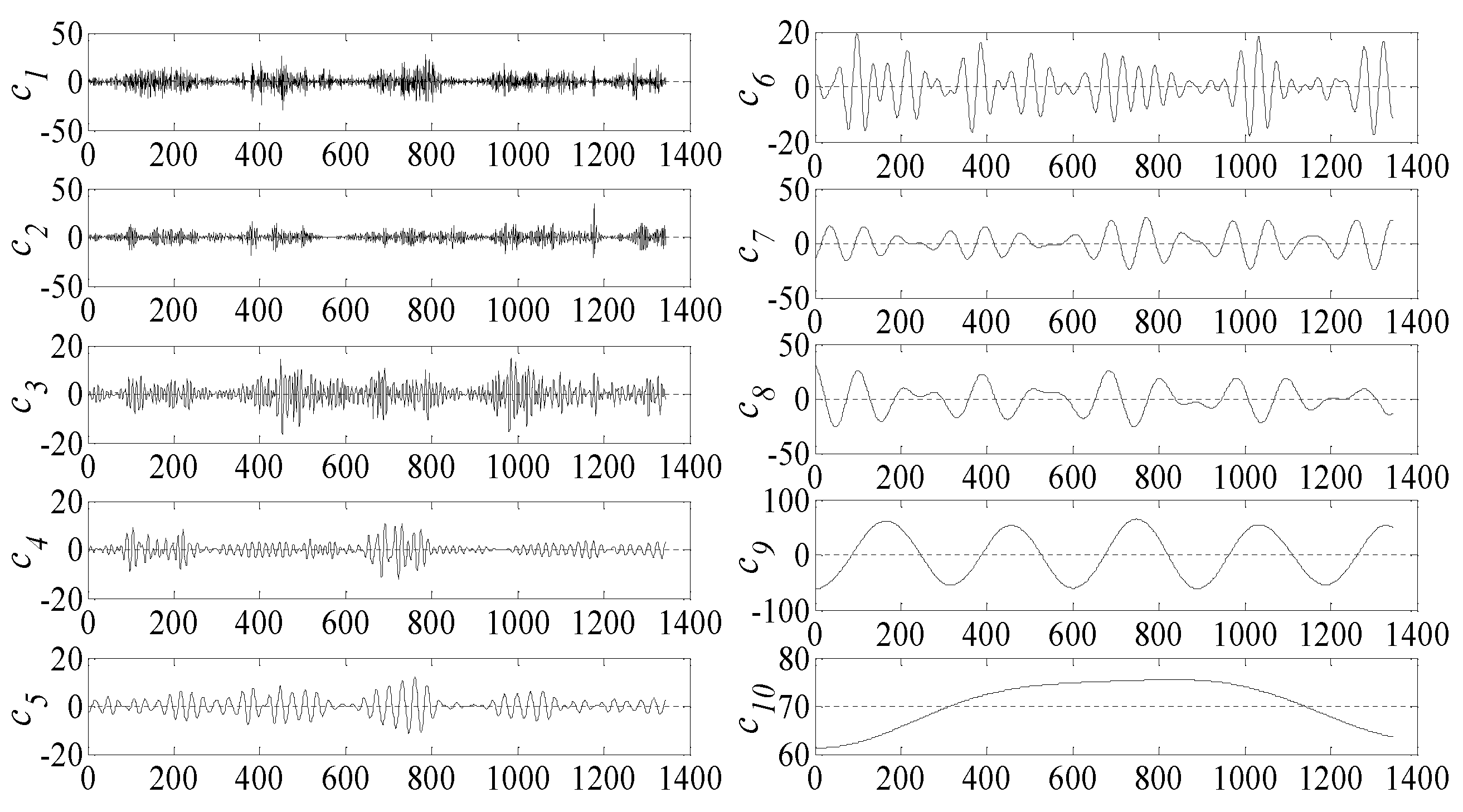
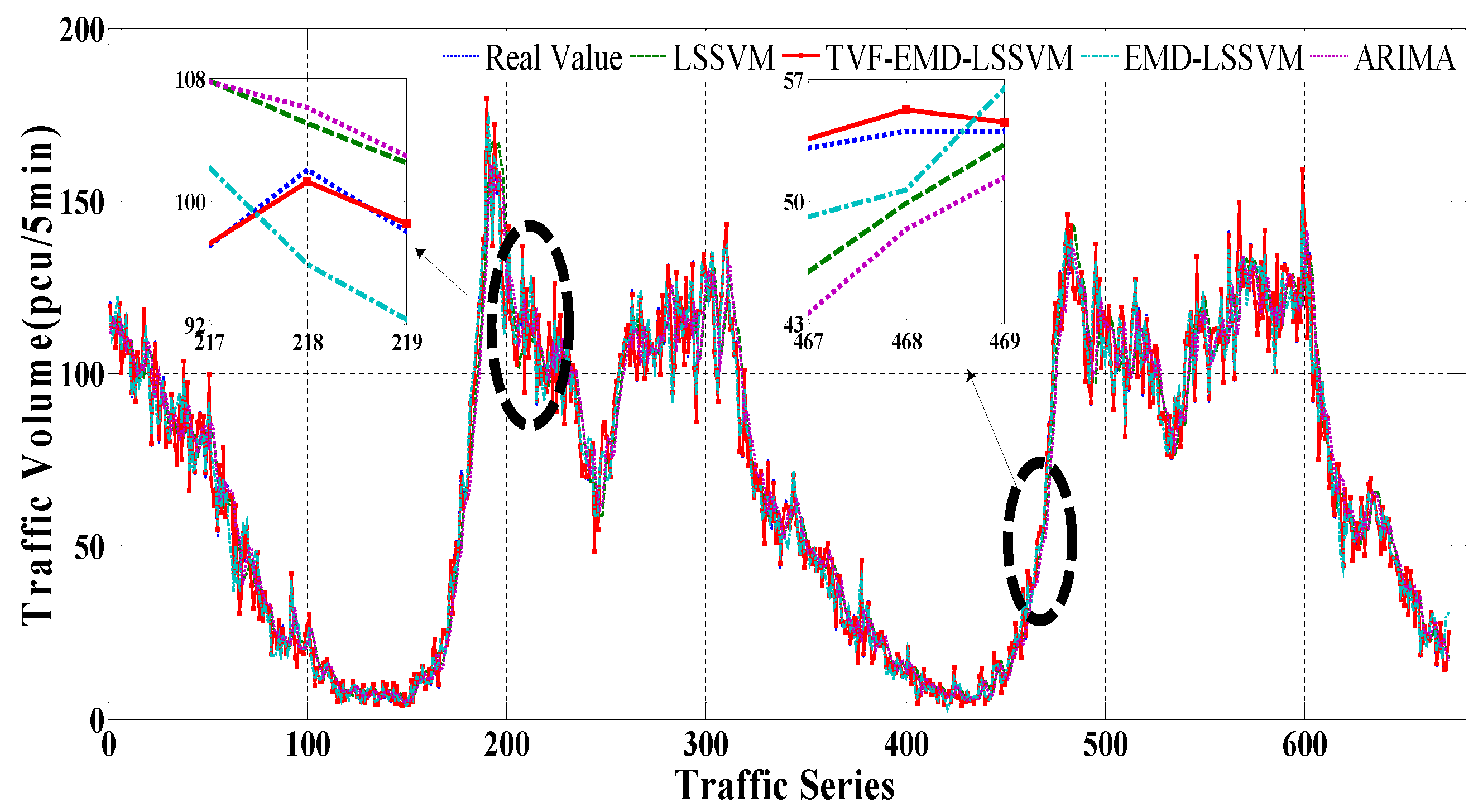
- Compared with the other three involved models, the proposed model had better forecasting performance, where its error indexes of MAE, MRPE, RMSE, RMSRE, and EC were 1.721, 3.969%, 2.974, 6.797%, and 0.9956, respectively. Specifically, in Figure 4, the red line represents the prediction result of the proposed model, while the blue line represents the true value. Their comparison indicates the proposed method could well capture the time-varying characteristics of the actual situation. From Table 2, the forecasting accuracy of the proposed model was higher than the EMD-LSSVM model with the reductions in terms of the five indexes MAE, MRPE, RMSE, RMSRE, and EC by 2.654, 5.991%, 2.831, 8.464%, and 0.0174, respectively. The reason could be that the TVF-EMD algorithm uses time-varying filtering technology, which could describe the time-varying characteristics of the data. Simultaneously, it can improve the imperfection of the model mixing in the EMD algorithm.
- Compared with the single models, the decomposition-based forecasting methods had the higher forecasting accuracy. For example, five error indexes in terms of MAE, MRPE, RMSE, RMSRE, and EC of the LSSVM model were 8.131, 17.871%, 10.801, 27.674%, and 0.9336, respectively, which presents the evident accuracy reduction in comparison with those of the proposed method. Compared with EMD-LSSVM model, these indexes were reduced by 3.756, 7.911%, 4.996, 12.413%, and 0.0306, respectively. The reason for these phenomena could be attributed to high non-stationarity and nonlinear characteristics embedded in the original data, which could be effectively addressed by the decomposition methods.
- The MAE, MRPE, RMSE, RMSRE, and EC of the ARIMA model were 8.284, 17.977%, 11.01, 27.25% and 0.9322. Compared with LSSVM, these indexes were reduced by 0.153, 0.106%, 0.209 0.424, and 0.0014, respectively. The reason could be attributed to that the nonlinear features hidden in the original data were more significant than those of linear one, which leads to the conclusion that the linear ARIMA model cannot capture the characteristics well. Therefore, it owns the lowest forecasting accuracy.
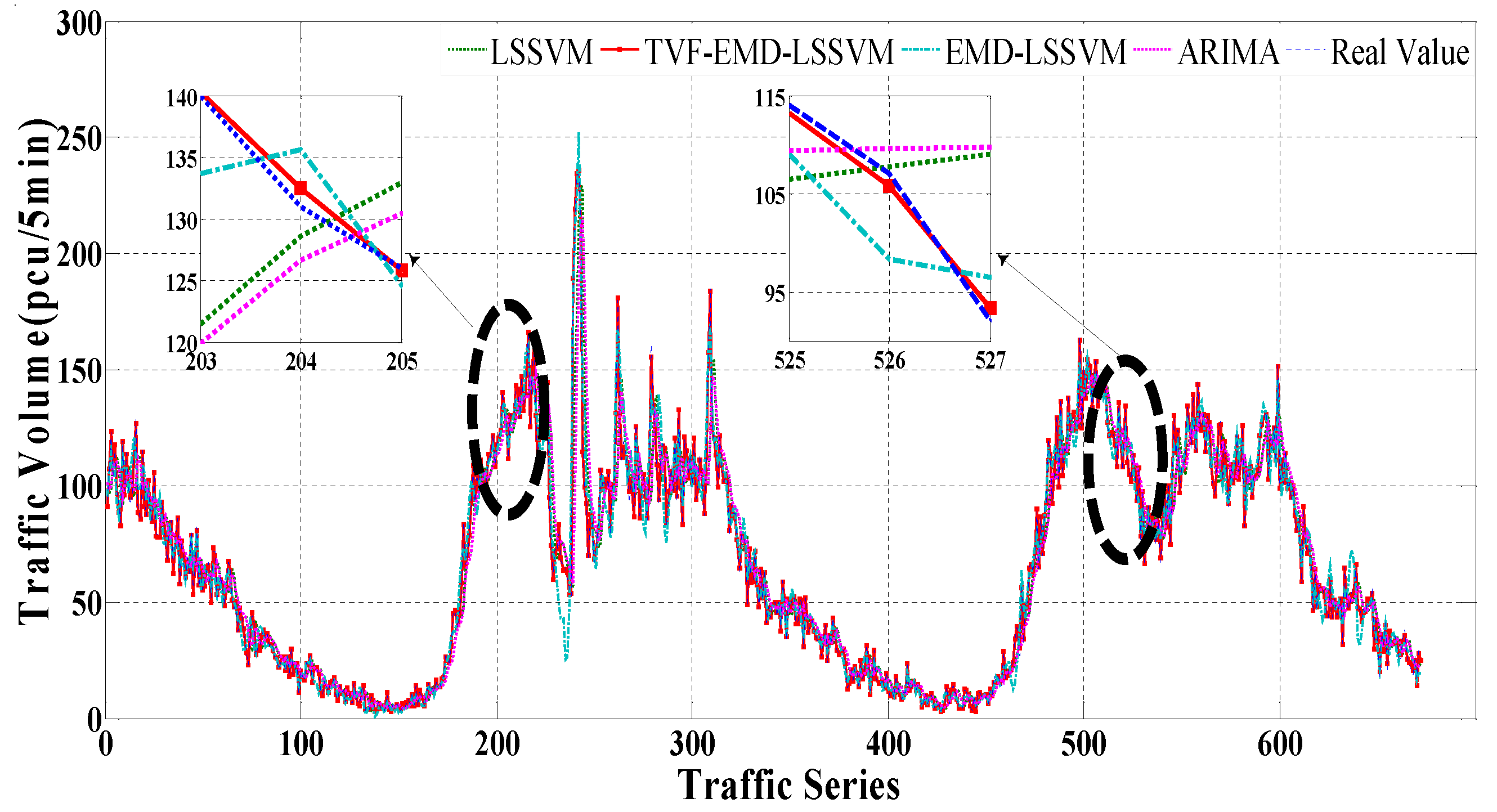
3.5. Additional Case
- TVF-EMD was better than EMD in dealing with data nonlinearity and non-stationary. The forecasting result proves that the forecasting accuracy of TVF-EMD based method was higher than EMD based method.
- The hybrid models could take advantage of the superiority each component model. The results display that the forecasting accuracy of the hybrid models was higher than that of the single models.
- The ARIMA model usually presented the high performance for the data with significant linear features. However, for short-term traffic volume data with high nonlinear characteristics, the LSSVM model may have better forecasting performance.
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Notation Illustration
| Parameters and variables | Dimension | ||
| Bandwidth | |||
| Instantaneous amplitude | Input signal | ||
| Instantaneous frequency | Amplitude of the i-th component | ||
| Local cut-off frequency | Down-sampling operation | ||
| B-spline function | B-spline order | ||
| Time | Convolution operation | ||
| Average instantaneous frequency | Instantaneous bandwidth | ||
| Weight vector | Offset | ||
| Variable Parameter | Variable Parameter | ||
| Penalty coefficient | Kernel function parameters | ||
| Instantaneous phase | Non-linear function | ||
| Phase of the i-th Component | Error variable | ||
| Pre-filter | Lagrange multiplier | ||
| Node | Input | ||
Appendix B. The Screening Process of EMD
Appendix C. The Construction of the B-Spline Time-Varying Filter
References
- Zhang, H.; Wang, X.; Cao, J.; Tang, M.; Guo, Y. A hybrid short-term traffic flow forecasting model based on time series multifractal characteristics. Appl. Intell. 2018, 48, 2429–2440. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, Z.; Vu, H.L.; Lyu, C. A spatio-temporal ensemble method for large-scale traffic state prediction. Comput. Civ. Infrastruct. Eng. 2020, 35, 26–44. [Google Scholar] [CrossRef]
- Min, W.; Wynter, L. Real-time road traffic prediction with spatio-temporal correlations. Transp. Res. Part C Emerg. Technol. 2011, 19, 606–616. [Google Scholar] [CrossRef]
- Kumar, S.V.; Vanajakshi, L. Short-term traffic flow prediction using seasonal ARIMA model with limited input data. Eur. Transp. Res. Rev. 2015, 7, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Z.; Chen, W.; Yue, H.; Liu, Z. A novel short-term traffic forecast model based on travel distance estimation and ARIMA. In Proceedings of the 2016 Chinese Control and Decision Conference (CCDC), Yinchuan, China, 28–30 May 2016. [Google Scholar]
- Wang, Y.; Li, L.; Xu, X. A piecewise hybrid of ARIMA and SVMs for short-term traffic flow prediction. Lect. Notes Comput. Sci. 2017, 493–502. [Google Scholar] [CrossRef]
- Wang, Y.; Papageorgiou, M. Real-time freeway traffic state estimation based on extended Kalman filter: A general approach. Transp. Res. Part B Methodol. 2005, 39, 141–167. [Google Scholar] [CrossRef]
- Okutani, I.; Stephanedes, Y.J. Dynamic prediction of traffic volume through Kalman filtering theory. Transp. Res. Part B 1984, 18, 1–11. [Google Scholar] [CrossRef]
- Williams, B.M.; Durvasula, P.K.; Brown, D.E. Urban Freeway Traffic Flow Prediction Application of Seasonal Autoregressive Integrated. Transp. Res. Rec. 1998, 1644, 132–141. [Google Scholar] [CrossRef]
- Kandil, N.; Wamkeue, R.; Saad, M.; Georges, S. An efficient approach for short term load forecasting using artificial neural networks. Int. J. Electr. Power Energy Syst. 2006, 28, 525–530. [Google Scholar] [CrossRef]
- Ishak, S.; Kotha, P.; Alecsandru, C. Optimization of Dynamic Neural Network Performance for Short-Term Traffic Prediction. Transp. Res. Rec. 2003, 45–56. [Google Scholar] [CrossRef]
- Vlahogianni, E.I.; Karlaftis, M.G.; Golias, J.C. Optimized and meta-optimized neural networks for short-term traffic flow prediction: A genetic approach. Transp. Res. Part C Emerg. Technol. 2005, 13, 211–234. [Google Scholar] [CrossRef]
- Zhu, J.Z.; Cao, J.X.; Zhu, Y. Traffic volume forecasting based on radial basis function neural network with the consideration of traffic flows at the adjacent intersections. Transp. Res. Part C Emerg. Technol. 2014, 47, 139–154. [Google Scholar] [CrossRef]
- Kumar, K.; Parida, M.; Katiyar, V.K. Short term traffic flow prediction in heterogeneous condition using artificial neural network. Transport 2015, 30, 397–405. [Google Scholar] [CrossRef]
- Wu, C.H.; Wei, C.C.; Su, D.C.; Chang, M.H.; Ho, J.M. Travel time prediction with support vector regression. IEEE Conf. Intell. Transp. Syst. Proc. ITSC 2003, 2, 1438–1442. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Shi, Q. Short-term traffic speed forecasting hybrid model based on Chaos-Wavelet Analysis-Support Vector Machine theory. Transp. Res. Part C Emerg. Technol. 2013, 27, 219–232. [Google Scholar] [CrossRef]
- Cong, Y.; Wang, J.; Li, X. Traffic Flow Forecasting by a Least Squares Support Vector Machine with a Fruit Fly Optimization Algorithm. Procedia Eng. 2016, 137, 59–68. [Google Scholar] [CrossRef] [Green Version]
- Luo, C.; Huang, C.; Cao, J.; Lu, J.; Huang, W.; Guo, J.; Wei, Y. Short-Term Traffic Flow Prediction Based on Least Square Support Vector Machine with Hybrid Optimization Algorithm. Neural Process. Lett. 2019, 50, 2305–2322. [Google Scholar] [CrossRef]
- Shang, Q.; Lin, C.; Yang, Z.; Bing, Q.; Zhou, X. Short-term traffic flow prediction model using particle swarm optimization-based combined kernel function-least squares support vector machine combined with chaos theory. Adv. Mech. Eng. 2016, 8, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Huang, G. Short-term wind speed prediction: Hybrid of ensemble empirical mode decomposition, feature selection and error correction. Energy Convers. Manag. 2017, 144, 340–350. [Google Scholar] [CrossRef]
- Shang, Q.; Lin, C.; Yang, Z.; Bing, Q.; Zhou, X. A hybrid short-term traffic flow prediction model based on singular spectrum analysis and kernel extreme learning machine. PLoS ONE 2016, 11, 1–25. [Google Scholar] [CrossRef]
- Labate, D.; Foresta, F.L.; Occhiuto, G.; Morabito, F.C.; Lay-Ekuakille, A.; Vergallo, P. Empirical mode decomposition vs. wavelet decomposition for the extraction of respiratory signal from single-channel ECG: A comparison. IEEE Sens. J. 2013, 13, 2666–2674. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Snin, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hubert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Duo, M.; Qi, Y.; Lina, G.; Xu, E. A short-term traffic flow prediction model based on EMD and GPSO-SVM. In Proceedings of the 2017 IEEE 2nd Advanced Information Technology, Electronic and Automation Control Conference, Chongqing, China, 25–26 March 2017. [Google Scholar]
- Tang, J.; Chen, X.; Hu, Z.; Zong, F.; Han, C.; Li, L. Traffic flow prediction based on combination of support vector machine and data denoising schemes. Phys. Stat. Mech. Appl. 2019, 534, 120642. [Google Scholar] [CrossRef]
- Tian, X.; Yu, D.; Xing, X.; Wang, S.; Wang, Z. Hybrid short-term traffic flow prediction model of intersections based on improved complete ensemble empirical mode decomposition with adaptive noise. Adv. Mech. Eng. 2019, 11, 1–15. [Google Scholar] [CrossRef]
- Li, H.; Li, Z.; Mo, W. A time varying filter approach for empirical mode decomposition. Signal Process. 2017, 138, 146–158. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, Z.; Miao, Q.; Wang, L. An optimized time varying filtering based empirical mode decomposition method with grey wolf optimizer for machinery fault diagnosis. J. Sound Vib. 2018, 418, 55–78. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhao, N.; Peng, L.; Liu, S. A new hybrid framework for probabilistic wind speed prediction using deep feature selection and multi-error modification. Energy Convers. Manag. 2019, 199, 111981. [Google Scholar] [CrossRef]
- Li, L.; Su, X.; Wang, Y.; Lin, Y.; Li, Z.; Li, Y. Robust causal dependence mining in big data network and its application to traffic flow predictions. Transp. Res. Part C Emerg. Technol. 2015, 58, 292–307. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Resource | Mean | Variance | Maximum | Minimum | Skewness | Kurtosis | Non-Stationarity |
|---|---|---|---|---|---|---|---|
| A | 70.184 | 20,710 | 188 | 3 | 0.0183 | 1.6495 | Strong |
| Model | MAE | MRPE | RMSE | RMSRE | EC |
|---|---|---|---|---|---|
| LSSVM | 8.131 | 17.871% | 10.801 | 27.674% | 0.9336 |
| EMD-LSSVM | 4.375 | 9.96% | 5.805 | 15.261% | 0.9642 |
| TVF-EMD-LSSVM | 1.721 | 3.969% | 2.974 | 6.797% | 0.9816 |
| ARIMA | 8.284 | 17.977% | 11.01 | 27.25% | 0.9322 |
| Data Resource | Mean | Variance | Maximum | Minimum | Skewness | Kurtosis | Non-Stationarity |
|---|---|---|---|---|---|---|---|
| B | 68.8284 | 2200.5 | 235 | 2 | 0.2587 | 2.0441 | Strong |
| Model | MAE | MRPE | RMSE | RMSRE | EC |
|---|---|---|---|---|---|
| LSSVM | 9.281 | 20.415% | 14.787 | 33.153% | 0.8201 |
| EMD-LSSVM | 5.93 | 13.228% | 8.405 | 20.675% | 0.8983 |
| TVF-EMD-LSSVM | 0.898 | 2.653% | 1.20 | 5.089% | 0.9855 |
| ARIMA | 9.584 | 20.364% | 15.762 | 32.269% | 0.808 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Zhao, L.; Li, S.; Wen, X.; Xiong, Y. Short Term Traffic Flow Prediction of Urban Road Using Time Varying Filtering Based Empirical Mode Decomposition. Appl. Sci. 2020, 10, 2038. https://0-doi-org.brum.beds.ac.uk/10.3390/app10062038
Wang Y, Zhao L, Li S, Wen X, Xiong Y. Short Term Traffic Flow Prediction of Urban Road Using Time Varying Filtering Based Empirical Mode Decomposition. Applied Sciences. 2020; 10(6):2038. https://0-doi-org.brum.beds.ac.uk/10.3390/app10062038
Chicago/Turabian StyleWang, Yanpeng, Leina Zhao, Shuqing Li, Xinyu Wen, and Yang Xiong. 2020. "Short Term Traffic Flow Prediction of Urban Road Using Time Varying Filtering Based Empirical Mode Decomposition" Applied Sciences 10, no. 6: 2038. https://0-doi-org.brum.beds.ac.uk/10.3390/app10062038