1. Introduction
The maximal covering location problem (MCLP), introduced by Church and Revelle [
1] maximizes the demands covered by the specified number of facilities to be located. MCLP has a wide range of applications in locating public facilities—such as health care facilities, police stations, schools, and fire stations, etc.—but it can also be used in locating private sector facilities such as warehouses, distribution centers, chain supermarkets, etc. Developing a model for each of the applications with the specific real situation, resulted in various extensions developed for the covering models since their introduction. The hierarchical MCLP [
2,
3], probabilistic MCLP [
4,
5] MCLP in competitive environments [
6], large-scale dynamic MCLP [
7], continuous MCLP for natural disasters [
8], and maximal hub location problem [
9] are some examples among the vast literature of the MCLP. The growing attention and interest in covering location problems are due to their applications. However, the developed models are far from real-world problems and there is still much work to do [
10]. Farahani et al. [
11] suggested the areas that could be considered for further research, such as having different facilities and capacitated facilities. In the current paper by considering modular capacitated facilities, we attempt to modify a closer model to real-world problems such as disaster relief service location problems.
Disaster relief services have been receiving global attention due to the scarcity of resources, accountability concerns, and the potential opportunities provided by advances in global information technologies [
12]. One of the solutions to overcome the scarcity of resources is modularization. Modularization of services in the case of disaster can be interpreted as what the World Vision International is doing, i.e., relief supplies are stored in four locations globally, and can be immediately shipped anywhere in the world [
13]. Furthermore, using mobile housing structures—such as temporary and portable offices, shelters, restrooms, warehouses, etc.—even modularization of the facilities is possible. These mobile structures are commonly used now and result in fast construction that is profoundly essential in a disaster situation like the Chinese government action caused by COVID-19 in building the Wuhan city 1000 bed hospital in 10 days utilizing the prefabricated constructions [
14]. In modular facilities, the mobile structures can move to the other areas when their mission is finished and it can result in total cost reduction because of the reusability of modules in other situations like the unique solution Japan has decided to offer praying rooms during the 2020 Olympic games [
15]. Attempting to optimize the module assignment decision, it increases flexibility [
16], reduces the costs and as a result increases sustainability. The rescue missions [
17], temporary housing [
18], and goods distribution [
19] in a disaster situation are more or less investigated in the literature, but addressing the service providing facilities in a modular and dynamic framework remains as a research gap that this gap is fulfilled in the current study.
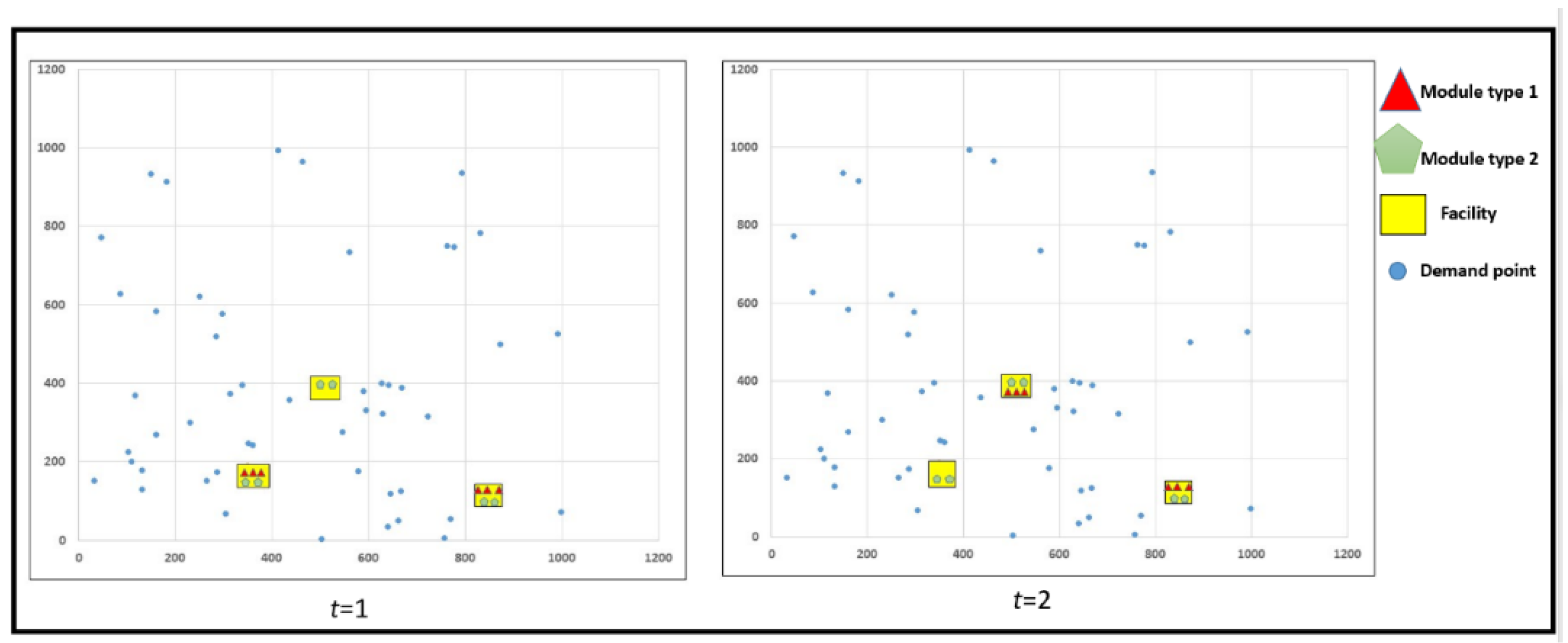
In this paper, another extension of the MCLP is presented that mainly concentrates on the structure of the facilities to be located. Almost all facilities are composed of different units and departments, which provide a special kind of services or products called modules of facilities. In real examples of hospital application, facilities are hospital location and modules are ambulances, operating rooms and staff members over time horizon. In the disaster relief centers, facility is the location of centers and the modules are tents, waters, foods, etc. In the supermarkets, facility is the location of supermarkets and the modules are hot food shelf, beverage shelf, cold product shelf, etc. In a practical setting, e-commerce companies adopt different pricing policies over different time periods under different demand forecasts. Those real-world problems and demand variation in different time periods necessitate to develop a multi-period model that optimizes the objective value in different time periods looking for optimal solutions for assigning the modules to the facilities and allocating the demand points to the modules. The proposed mathematical model in this paper locates the capacitated facilities at the beginning of the planning horizon and then in each time period, assigns the optimum number of capacitated modules to the facilities with the objective of maximizing the covered demands and minimizing the module assignment cost. Modularization of the facilities provides the opportunity to develop more cost and energy-efficient smart facilities. One of the main applications of this model is for a disaster relief situation in which government is the decision maker. The service request of demand points is not the same in all disasters and depends on many factors such as the severity of the disaster. Demand fluctuation can be reflected by having the multi-period planning model. In this application, the facilities are the disaster relief centers, the modules can be ambulances, trucks, helicopters, first aid units, food providing units, sleeping tents, shower rooms, etc. and the demand points are the residents or residential areas affected by the disaster and having service requests. The locations of a limited number of disaster relief facilities are first determined and having the assumption that each disaster is happening in one of the time periods of the planning horizon, the modules are assigned to the located facilities. The modules are capacitated and they have different sizes. The optimal number and size of each module’s kind that should be assigned to the relief centers are determined by the model in order to have maximized allocated and covered demand points. After terminating the mission of modules in one of the affected areas in one period, in the next period the modules can be transferred to the other affected area to provide service there.
Other applications of this model can be in locating and service providing of chain convenient stores as the facilities and decision maker is the operation planning department. There are many product categories available in these stores that can be assumed as the modules and customers are the demand points. Most of the time, there is no need to provide all kinds of products in all stores when there might be not enough demand for them in different seasons. According to our model, the predefined stores can be located using the developed model at the beginning of the planning horizon. Afterwards, according to the demand variation in different areas and time periods, the optimal number and size of modules are assigned to the located stores. The objective of maximizing the covered demands from one hand, and minimizing the cost of module assignments on the other hand creates a good balance between service quality and cost management.
The mathematical model of the multi-period modular capacitated maximal covering location problem (MMCMCLP) is a mixed integer linear programming model. The objective is to maximize the profit that is obtained from the income of covering demand points and the cost of module assignment. Accordingly, three kinds of decisions are determined by MMCMCLP as:
Location of the predefined number of facilities;
Type and number of each module assigned to the located facilities in each time period during the planning horizon;
Percentage of allocated demands of points to the assigned modules in each time period.
The small-size test instances can be solved to optimality using general solvers such as CPLEX. As the size of the problems increases, this solver is unable to solve the problems. To overcome this difficulty, a Lagrangian decomposition-based algorithm is developed that obtains an upper value and lower value for the optimal objective value, for which the decision makers can be assured that their profit is a value between the generated bounds and will not exceed these values. For MMCMCLP that is a maximization problem, the Lagrangian relaxation (LR) can generate an upper bound on the optimal objective value. Furthermore, many possible relaxations have been examined to figure out the relaxation of which constraints yields to the most time-efficient subproblem. In order to be able to provide sufficient evaluations on the possible methods, two procedures are proposed. In both approaches, the upper bounds are calculated by using two different sets of relaxed constraints and a decomposed problem. We also have developed two procedures to obtain a lower bound for the optimal objective value of the proposed model. In the first approach, the lower bound is computed by generating feasible solutions. In the second procedure, the lower bound is obtained from a developed heuristic method that locates the predefined number of facilities according to the criteria of more capacity and coverage of demands. Afterward, a sufficient number of modules with lower cost and more capacity would be assigned to the located facilities to maximize the number of allocated demands. Two relaxation problems and a decomposed problem provide three different upper bounds, which in addition to two lower bounds obtained from constructed feasible solutions and a heuristic method provide various bounds. The best method is the one that can produce the tightest upper and lower bounds, for which the bounds obtained from different approaches are analyzed to investigate the tightest bounds to select the best method.
The main contributions and innovations of this study are summarized as follows:
We propose a new model called multi-period modular capacitated maximal covering location problem, which in addition to the facility location decisions, it determines module assignment and demand allocation decisions in different periods of the planning horizon.
The configuration of the facilities using the modularity concept results in having three-level facilities. Different size of modules (first level) along with having a different kind of modules (second level) makes it possible to have different facilities (third level).
An efficient Lagrangian decomposition-based method is developed to derive the upper bound. Furthermore, two different lower bounds are developed and compared to synthesize the proposed Lagrangian decomposition (LD) method.
Different upper bounds and lower bounds from various approaches are compared to evaluate the efficiency and tightness of the bounds. Our findings approve the superiority of the bounds obtained from Lagrangian decomposition-based (upper bound) and heuristic method (lower bound) over large-scale instances.
Sensitivity analysis for the problem is conducted to investigate the validity of the proposed model under different parameters.
The remainder of the paper is organized as follows.
Section 2 reviews the related studies. The mathematical model for the MMCMCLP is provided in
Section 3. In
Section 4, the solution approach to obtain Lagrangian upper bound integrated with a heuristic method to achieve the lower bound of the problem is proposed. Then numerical examples are analyzed in
Section 5 and finally, conclusions are discussed in
Section 6.
4. Solution Procedure
There are three methods namely exhaustive enumeration, mathematical programming, and heuristic approaches to solve the location problems. Heuristic approaches can solve large size problems, but do not guarantee to reach an optimal solution [
46]. Lagrangian relaxation-based heuristics have also been applied to many combinatorial optimization problems [
47]. The quality of the solution is controlled by the upper and lower bounds provided by the LR procedure. Geoffrion and Bride [
48] as one of the pioneers in studying LR to solve facility location problems, obtained theoretic and geometric insights relating the value of an LR to the usual linear programming relaxation (LPR). Their results show that LR yields a great improvement over LPR at only a small additional computational cost and cutting-planes far superior to Gomory fractional cuts. They also suggested a similar in-depth analysis of LR applied to other important classes of problems as the one is performed in this paper.
Pirkul and Schilling [
49] have studied the capacitated MCLP in which the facilities can provide either a primal service for demand points or back-up service. To solve their integer linear programming model, they applied the LR method by relaxing the demand (primary and back-up) allocation constraints and proposed a heuristic method to construct a feasible solution from the subgradient method.
In this section, different possible relaxations for MMCMCLP and solving procedure for each possible relaxation are presented. In addition, a heuristic algorithm, to obtain the lower bound, is presented in the last subsection. For each proposed relaxed problem, two approaches will be used to solve it. In the first approach, the lower bound can be obtained and updated in iterations using feasible solutions and in the second approach, the lower bound would be obtained from the heuristic method.
4.1. Upper Bounds
4.1.1. LR1
There are several Lagrangian relaxations for MMCMCLP. By using this procedure, a hard problem is converted into a relatively easy one by relaxing sets of complicated constraints. After testing possible combinations of constraints to be relaxed, in the first relaxation problem (LR1) the set of constraints (3)–(5) have been chosen to be relaxed. Let , be the multipliers associated with constraint set (3)–(5), respectively. Then, the Lagrangian problem LR1 is defined as:
Subject to (2), (6)–(8).
The objective function of the problem LR1,, provides an upper bound on the objective function of the MMCMCLP for .
4.1.2. LR2
Another possible combination of constraints to be relaxed is the set of constraints (3) and (6). Let and be the multipliers associated with constraint set (3) and (6), respectively. Then the Lagrangian relaxation problem, LR2 is defined as:
Subject to (2), (4), (5), (7), and (8).
The objective function of the problem LR2, , provides an upper bound on the objective function of the MMCMCLP for .
4.1.3. Lagrangian Decomposition (LD)
When the Lagrangian multipliers
and
are fixed, the relaxed model can be decomposed into two subproblems. The first (SubP1) determines the facility locations. After solving this problem, the set of locations would be categorized as
that refers to the located and opened facilities and
that would be the set of locations that there is not opened facilities in them and we have
and
. For
the second subproblem is defined as (SubP2) that assigns modules to each opened facility and allocates the demand points to the modules. SubP1 and Subp2 are as follows:
Subject to (2), (4), (5), and (8).
As the constraints (3) are relaxed there is no restricting constraint for the amount of coverage for demand points and they can have any positive value. The valid inequality (13) is added to SubP2 (as well as to LR1 and LR2), which is a redundant constraint for the primal MMCMCLP. The SubP2 is solved with the addition of (13) to obtain results for variables
and
. An interesting feature of the SubP2 is that this problem can be decomposed and solved for each
.
We use the subgradient method to compute .
4.2. Lower Bounds
We develop two lower bound procedures for MMCMCLP. The first one uses the solutions obtained from LR1, LR2, and LD and constructs a feasible solution as the lower bound. The second lower bound procedure is a novel heuristic method.
4.2.1. Lower Bound from Feasible Solutions
is the lower bound to the MMCMCLP that can be calculated by fixing the variables and in constraints (3)–(6) and calculating the objective function (1) at the th iteration and solving the problem by a branch and bound (B&B) procedure using a general-purpose solver.
4.2.2. Lower Bound Heuristic on MMCMCLP
In this section, a heuristic method to obtain the lower bound for the MMCMCLP is presented. This heuristic method produces feasible solutions that can be used as an approximation for the optimal value of the MMCMCLP. It is important to note that due to the computational simplicity of the proposed heuristic method, it can be used as an independent method to obtain a feasible approximate solution on the optimal objective value of MMCMCLP when the computational resources are limited. At Step 1, the heuristic starts with locating
facilities out of
possible points using the criteria of more capacity (with weight factor
) and the more coverage provided with each
point (with weight factor
). Using weight factors, one can determine the importance of cost or coverage in locating facilities. After finding the location of the
facilities, the decisions for the module assignment will be fulfilled at Step 2. At Step 2, the algorithm considers the potential of each size of each module to be assigned to the
located facilities using parameter
. At Step 3, the demand points are sorted by the possible income that they can provide from each located facility
and module
at time period
. At Step 4, the sorted income of demand points from modules is augmented in parameter
until it reaches the capacity of the located facilities in each time period. On the other hand, the sorted income of the demand points will be augmented in parameter
for each located facility
and each module
at each time period
, until it reaches the capacity of the module
. At the final step, using the income from the covered demands and the calculated cost of the assigned modules, the objective value can be obtained. In contrary to the mathematical model of the MMCMCLP that capacity constraints impose computational difficulty, these constraints play a positive role in the quality of the solution obtained by the heuristic method. The detailed algorithm is shown as follows (Algorithm 1):
| Algorithm 1: The Heuristic Solution Method for MMCMCLP. |
| Step 1. Choose the largest values of . is the set of that provides maximum values of and put the related , otherwise . |
Step 2. Calculate for each .
If , assign the module to the located facility at time period in variable , otherwise . Calculate . |
| Step 3. Sort with respect to for each . Set and . |
| Step 4. For each iterate until . For each , iterate until . For the demand points involved in the iterations put , for others . |
| Step 5. = |
4.3. Sub-Gradiant Method
In each iteration of the LR method, the upper bound is updated according to the rules mentioned in the following. Assume
,
,
and
are the initial multiplier vectors, a sequence of multipliers can be updated by using the subgradiant method at iteration
.
is the value of the step size parameter at iteration
and the solution procedure for LR1 is summarized as follows (Algorithm 2):
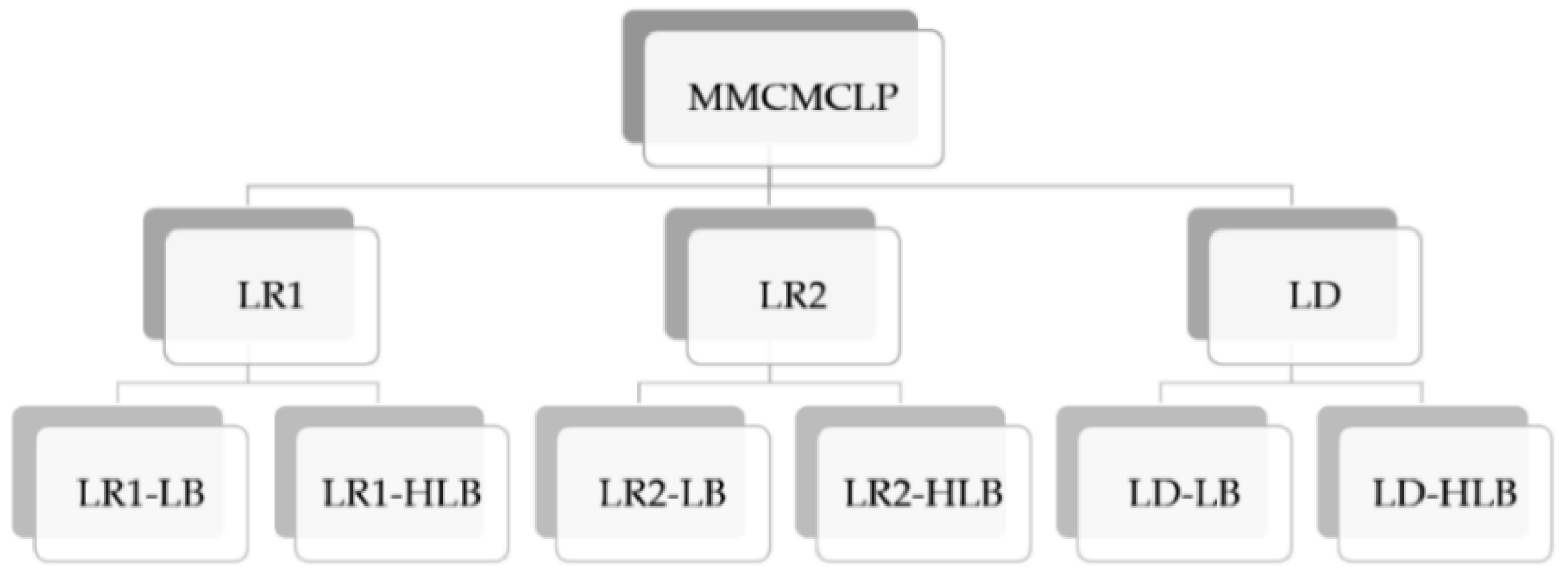
| Algorithm 2: LR1-LB |
| Step0. Put . |
| Step1. Solve the problem LR1. Put . Find the optimal values for variables and calculate |
| Step2. Using a feasible solution of the problem MMCMCLP (Section 4.2.1), Calculate . |
| Step3. Update the upper and lower bounds. If , then put . If , then put . |
| Step4 Update the step size parameter. If there was no improvement in upper bound for the past iterations then put in which . |
Step5. Check the termination conditions. Stop, if one of the following conditions holds.
or,. |
| Step6. Update Lagrangian multipliers and go to Step 1. |
The same procedure is used to solve LR2, except that instead of multipliers , and the multipliers and will be used and instead of LR1, LR2 should be solved in each iteration. Accordingly, to solve LD the same procedure as LR2 would be used except that instead of LR2 first then will be solved to calculate in order to be used as the upper bound.
For the case the lower bound is obtained from the heuristic method and to save space, in the following the procedure for LD is described and for LR1 and LR2 the procedure would be the same. The only difference would be the multipliers used and the problems to be solved in steps 0 and 1, respectively.
The solution procedure for LD using the heuristic method to obtain the lower bound
is summarized as follows (Algorithm 3):
| Algorithm 3: LD-HLB |
| Step 0. Put . |
| Step 1. Solve the problem SubP1. Obtain and solve SubP2 for . Put Find the optimal values for variables and calculate. . |
| Step 2. Update the upper bound. If then put |
| Step 3. Update the step size parameter. If there was no improvement in upper bound for the past iterations then put
in which . |
Step 4. Check the termination conditions. Stop, if one of the following conditions holds.
or . |
| Step5. Update Lagrangian multipliers and go to Step 1. |
6. Conclusions
In this paper, a new extension of the maximal covering location problem is presented, which has some important features such as the possibility of having different facilities that are composed of capacitated modules, the possibility of choosing between the different size of modules commensurate to demanded services, capacity constraints for facilities, multi-periodic demands for points, and gradual coverage for facilities. The proposed model has many applications such as locating the facilities in post-disaster situations, supermarkets, and hospitals. The idea of using the modularity concept for the facilities resulted in less cost, more flexibility, and it can provide sustainability from environmental and economic aspects. A mathematical model has been proposed for MMCMCLP, which can fit different real-life problem characteristics. Our conducted sensitivity analysis approves the accuracy of the proposed model as it can generate logical solutions by investigating various changes of parameters.
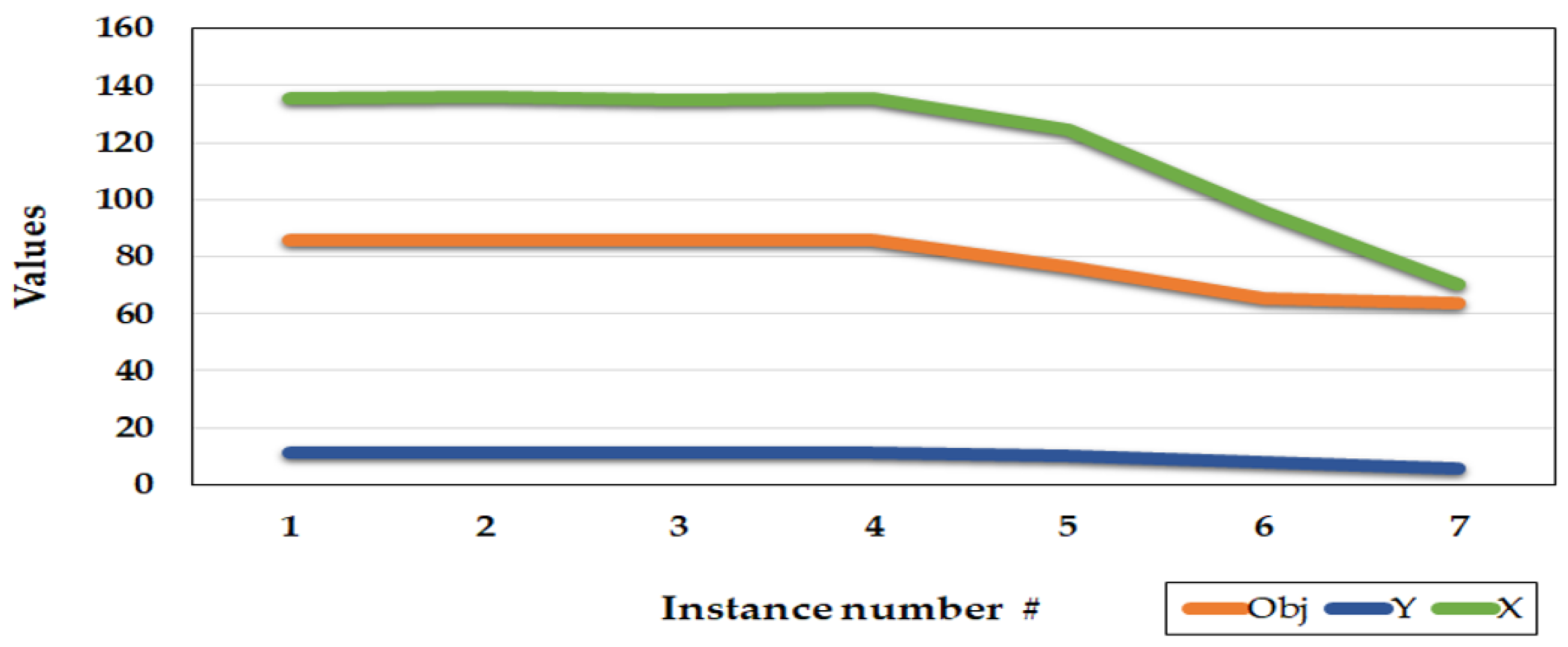
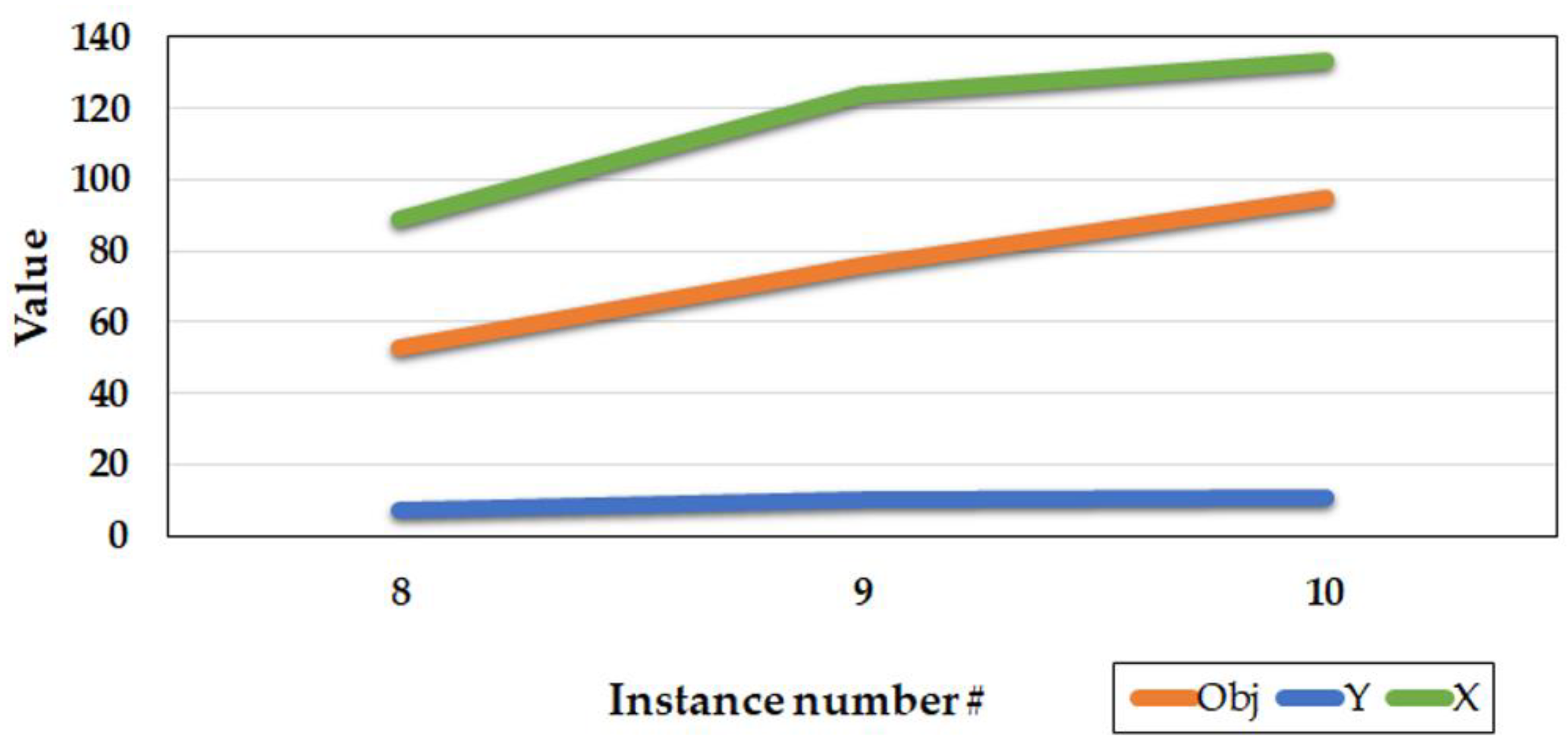
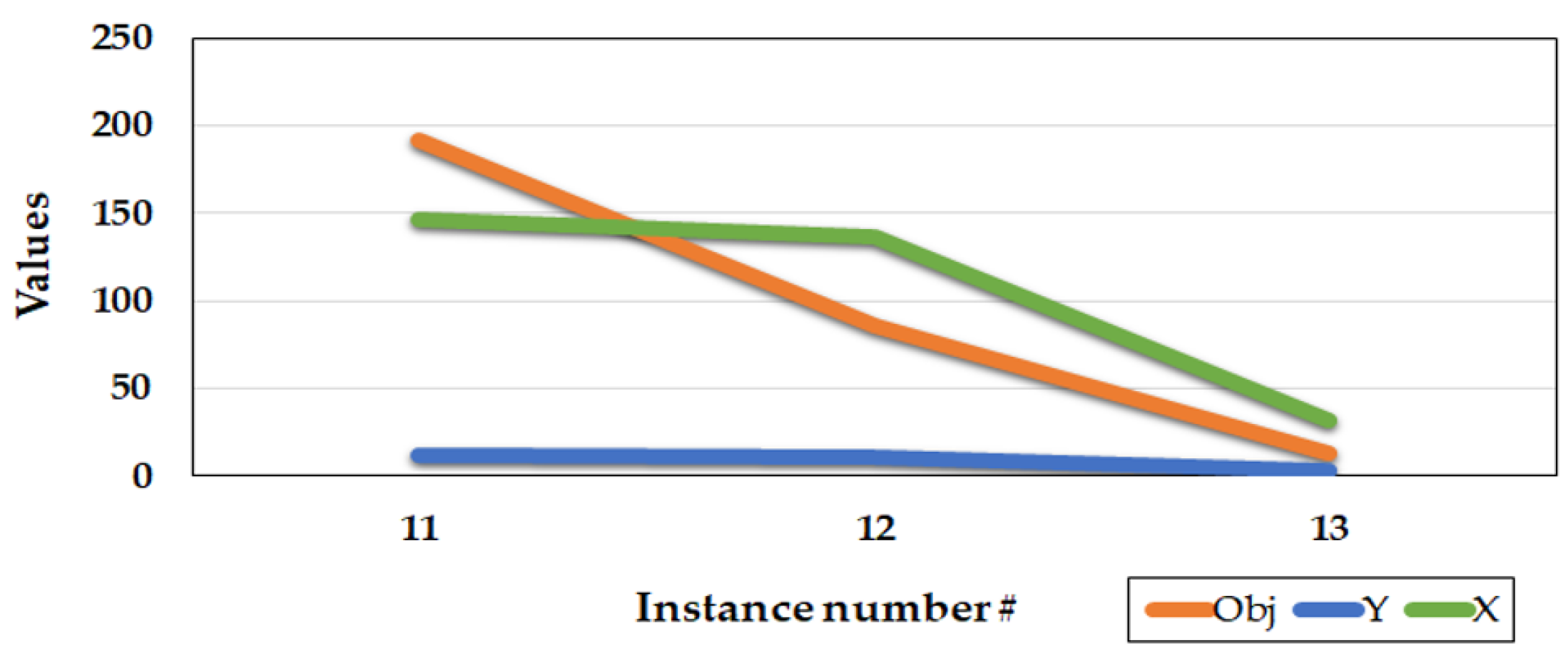
After examining the possible relaxations for the MMCMCLP, different methods are proposed to solve the relaxed and decomposed problems and obtained various upper and lower bounds. Accordingly, a heuristic method is proposed that is able to generate higher lower bounds for the optimal solutions. Although the CPLEX could just solve problems up to 300 demand points, the proposed solution procedures were capable of producing bounds with up to 1000 demand points and 100 potential facilities and beyond. Our results indicate that although common LR problems can still generate upper bounds for complex problems like MMCMCLP, Lagrangian decomposition-based approach combined with the lower bound obtained from developed heuristic methods shows better performance and is preferred to solve for both small- and large-scale problems.
The most important barrier over-performing MMCMCLP for the real application mentioned as disaster relief facility location, hospitals is data insufficiency for the parameters of demands, capacities and costs. To resolve these barriers there is a need to have access to data sets and also applying well-defined demand prediction methods. In addition, a possible future study could be compared using various matheuristics/metaheuristics for this problem, studying the probability of failure and breakdown of modules in different time periods and considering the variable radius coverage for facilities.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}