Feasibility of LoRa for Smart Home Indoor Localization
by
Kyungki Kim
1, 
Sining Li
2,
Milad Heydariaan
3,
Nour Smaoui
3,
Omprakash Gnawali
3,
Wonho Suh
4,
Min Jae Suh
5 and
Jung In Kim
2,* 1
Durham School of Architectural Engineering and Construction, University of Nebraska-Lincoln, Lincoln, NE 68588, USA
2
Department of Architecture and Civil Engineering, City University of Hong Kong, Hong Kong 999077, China
3
Department of Computer Science, University of Houston, Houston, TX 77004, USA
4
Department of Smart City Engineering, ERICA Campus, Hanyang University, Ansan 15393, Korea
5
Department of Engineering Technology, Sam Houston State University, Huntsville, TX 77340, USA
*
Author to whom correspondence should be addressed.
Appl. Sci. 2021, 11(1), 415; https://0-doi-org.brum.beds.ac.uk/10.3390/app11010415
Submission received: 30 November 2020
/
Revised: 28 December 2020
/
Accepted: 30 December 2020
/
Published: 4 January 2021
(This article belongs to the Special Issue BIM and Its Integration with Emerging Technologies)
Abstract
:With the advancement of low-power and low-cost wireless technologies in the past few years, the Internet of Things (IoT) has been growing rapidly in numerous areas of Industry 4.0 and smart homes. With the development of many applications for the IoT, indoor localization, i.e., the capability to determine the physical location of people or devices, has become an important component of smart homes. Various wireless technologies have been used for indoor localization including WiFi, ultra-wideband (UWB), Bluetooth low energy (BLE), radio-frequency identification (RFID), and LoRa. The ability of low-cost long range (LoRa) radios for low-power and long-range communication has made this radio technology a suitable candidate for many indoor and outdoor IoT applications. Additionally, research studies have shown the feasibility of localization with LoRa radios. However, indoor localization with LoRa is not adequately explored at the home level, where the localization area is relatively smaller than offices and corporate buildings. In this study, we first explore the feasibility of ranging with LoRa. Then, we conduct experiments to demonstrate the capability of LoRa for accurate and precise indoor localization in a typical apartment setting. Our experimental results show that LoRa-based indoor localization has an accuracy better than 1.6 m in line-of-sight scenario and 3.2 m in extreme non-line-of-sight scenario with a precision better than 25 cm in all cases, without using any data filtering on the location estimates.
1. Introduction
A smart home is a dwelling that interconnects and manages intelligent devices to provide mutual functions of omnidirectional information to occupants [1]. Some applications of the smart home (e.g., health and sleep monitoring, surveillance, security) require a real-time indoor positioning of users, which is specifically important for elders and physically disabled people [2]. Furthermore, the localization allows intelligent devices not only to carry out basic tasks (e.g., home service robots) but also to execute complex commands, flexibly interacting with residents [3]. Thus, accurate indoor localization is an essential prerequisite of implementing an automated and convenient smart home environment.
To select an appropriate localization technology for a smart home, the stakeholders should consider four aspects. First, indoor settings often reflect, diffract, and scatter the signals during the transmission and such signals decrease the accuracy of localization [4,5]. Thus, the localization systems should be able to obtain the device locations under both line-of-sight (LOS) and non-line-of-sight (NLOS) conditions accurately. Second, stakeholders for a smart home should consider the ranges of the signals of localization technologies. Technology with a broader range has better adaptability for various scenarios, and the broader reception range also reduces the number of anchor points [6]. The third aspect is the cost of localization technology. Since the consumers of the smart home are sensitive to prices, an affordable localization system increases the feasibility of smart home implementation [7]. The last aspect is energy efficiency [8,9]. The property of high energy efficiency extends device battery life, reduces the cost, and more accessible for end-users. Tag-based localization techniques rely on at least three static anchors to estimate the position of a dynamically moving tag. However, due to walls, furniture, and heavy electronic devices (e.g., refrigerator, television) blocking the signals, it is highly challenging to ensure the minimum number of anchors continuously communicates with tags in a smart home.
Several technologies have been applied in the indoor localization of smart homes. The Global Positioning System (GPS) [10] is the most pervasive outdoor localization system, while it is unavailable for smart home localization. Since the surface in the building blocks and reflects GPS signals, this phenomenon makes the GPS signal too weak to work accurately inside of buildings [11]. Several tag-based localization technologies have been applied in the indoor localization of smart homes including passive radio-frequency identification (RFID), active RFID, ultra-wideband (UWB), Bluetooth low energy (BLE), and low range (LoRa). With the introduction of radio communication technologies, various affordable sensing techniques, such as RFID system, have provided a good opportunity for indoor localization services [12,13,14,15,16,17]. The existing RFID localization techniques can be categorized into two types: tag and antenna localization. The tag is attached to tracked objects in the tag localization technique, while multiple antennas are installed at known locations in the indoor environment [12,18]. Moreover, the antenna localization technique tracks RFID antennas’ position, which is equipped to moving objects, and tags are installed in the underlying place. In both cases, dynamically moving objects’ locations can be estimated based on received signal strength between tags and antennas converted to distance [19]. However, the RFID positioning systems with a high-level accuracy require installing a significant number of tags or antennas in the room [15].
Compared with the RFID system, the UWB system, which transmits ultra-short pulses over a large bandwidth (>500 MHz), could correct to a few centimeters [20]. However, the limitation of UWB localization systems is its poor performance under NLOS conditions that commonly exist in residential buildings with walls and furniture [21]. Another powerful technology is BLE, which acquires radio frequency (RF) signals and utilizes the received signal strength indicator (RSSI) value to identify the real-time localization [22]. BLE has many benefits, for example low energy usage, and low cost. At the same time, with the widespread of Bluetooth, BLE has minimal infrastructure requirements to adoption [23]. The fundamental challenge of BLE is the high susceptibility to fast fading of 30 dB in close positions [24]. This problem affects the stability of BLE localization technology. Meanwhile, when common building elements block the BLE signal, it has a higher packet drop rate than other sensing technologies [25]. This phenomenon cuts back the effective coverage range of the BLE localization system. Due to these fundamental limitations, indoor localization using those sensing technologies suffer from low accuracy, packet loss, or the need to install many sensing devices.
However, LoRa has a great potential as a robust and feasible solution for indoor localization for smart home applications. With relatively low cost and power consumption, the LoRa’s signal with city-level range is resilient to multipath effect or noise. Therefore, LoRa signals have good penetration ability and stability, which is more stable than WiFi and BLE [25,26]. Despite the promising potential, most the existing studies [27,28] and commercial applications [29] use LoRa for rapid collection of sensing data from remote locations rather than directly calculating locations of objects. There are initial studies [25,26] that compared LoRa with WiFi and BLE. However, no study has rigorously evaluated LoRa’s performance as a home-level indoor localization system that tracks the location of objects in a home with light walls, heavy furniture, and electronic devices that cause different degrees of signal intensity under NLOS conditions.
To overcome the limitation, this study investigates the feasibility of applying LoRa for indoor localization in residential apartments unit with only three static LoRa anchors. To this end, the research team carried out an experiment that evaluated the ranging and trilateration accuracy of LoRa in a furnished apartment, which includes LOS and NLOS scenarios. The experiment results were analyzed based on the context of LOS and NLOS situations.
The following section discusses the performance of five sensing technologies, which are used for indoor localization, from literature review in detail. After describing the experimental setup and calibration process, the authors discuss the feasibility of LoRa for the indoor localization under both LOS and NLOS situation in a furnished apartment.
2. Literature Review
Recent advancements in wireless sensing technologies are bringing unprecedented changes to smart home applications. Significant efforts have been made by academic studies and industry professionals to apply various sensing technologies (e.g., passive and active RFID, BLE, UWB, and LoRa) for real-time localization in the built environment with different purposes. Table 1 summarizes the five sensing technologies, and the following of this section reviews their application areas, strength and weakness. After that, this section also describes the objectives and scope of this research based on the findings from the review.
2.1. Radio Frequency Identification Device (RFID)
The passive RFID is a low-cost location-sensing technique. The passive tags reflect and modulate the radio frequency signal emitted from readers to realize the localization. Nevertheless, passive tags can run without a battery; simultaneously, it has a limited applicable range. Fortin-Simard et al. [48,49,50] tracked the localization of a mobile robot with RFID antennas using an RSSI fingerprinting method. This study requires a training phase that involves the collection of RSSI data from tags and matching of the RSSI vectors to locations. Though centimeter-level accuracy was reported, this approach relies on RSSI-based training when the space configuration changes. In smart home applications, slight changes in configurations (e.g., moving furniture, tables) would lead to fingerprints changes and the need for frequent training. Yamano et al. [51] also introduced a learning-based localization method with passive RFID technology to provide a position for mobile robots.
The RFID system used Support Vector Machine (SVM) to construct classifiers to model the features of localization problems. However, the experiment does not consider the signal blocking caused by general building elements. The improved experimental results were calculated under the LOS conditions, which cannot correctly reflect the accuracy of indoor localization for real-world implementation. Baeg et al. [16] constructed a prototype that uses the passive RFID system for localization and navigation of a light-weight robot in the smart home environment. In this prototype, most sensing tags can be installed in the environment, and the service robot is equipped with an RFID antenna for object recognition and object handling for localization. Although a smart environment was developed, lightweight robots’ performance (e.g., accuracy, applicable range, reliability) has not been tested or validated in this study. Furthermore, tracking an antenna may not be a universal solution for smart home applications that need to track the locations of people or small objects.
The active RFID consists of readers and active tags. The active tags contain a radio transceiver and a button-cell battery used to power the transceiver. Thus, the active RFID has a broader reception range and costs more than passive RFID. The SpotON system [6] is the first localization system based on active RFID technology. This system integrates the RSSI technology, the aggregation algorithm, and the payload distribution measurement to calculate the indoor location. However, the SpotON system is limited by small applicable range (less than 16 m2) and high energy consumption of tags (2AA batteries in 30 h).
Another well-known indoor localization sensing system based on the active RFID is the LANDMARC system [52]. The researchers for the system have developed an algorithm to estimate the relations between physical distance, power levels, and signal strengths. Yet, the accuracy of LANDMARC system highly depends on the density of reference tags. To reaching one-meter average error, installation of four readers and one reference tag per square meter is needed. Many methods [53] were developed based on the LANDMARC system. For example, Jain et al. [40] used a backtracking algorithm to identify reference tags for the LANDMARC to reduce the requirements of the density of tags and improve localization accuracy. Some studies adopted the active RFID system for smart home applications.
Wang et al. [54] proposed an indoor positioning system to track users’ movement and direction in a smart home environment. The active RFID tags are assigned in the positioning area, and an RFID antenna is attached to the user. This study analyzed the active tags’ overlapping sensing areas to better match the signal strength and various areas. When a user roves in an area, the user moves toward or away from the tags inevitably changing the received signal strengths. Though this study could calculate the moving direction based on the relative signal strength of the active tags, this approach may not be a solid solution for smart home applications because of an unrealistic assumption of perfectly circular shapes of the sensing areas. Furthermore, this study did not address the movements or obstacles that cause RSSI fluctuation and lower accuracy.
2.2. Bluetooth Low Energy (BLE)
BLE is a low-cost and high-energy localization technology [55]. The BLE-based system [56] used the received signal strength (RSS) fingerprinting method to measure a distance. It is embedded with k-Means clustering to estimate the indoor position precisely. Yet, the utilization of the fingerprinting algorithm involves an interactive training process which is a barrier to robust implementation of the system. The Bluetooth indoor positioning system (BIPS) [57] is a representative BLE-based localization system, which could track indoor mobile users without training. The BIPS guarantees cost-effective and energy-efficient, but it has a short reception range and the location error above three or four meters.
Another indoor localization system [58] for smart home adopted Bluetooth technology and RSSI value for positioning. The research team used the range average calculation as the smooth filter to deal with considerable RSSI value fluctuation while using the delta-based sampling to collect persuasive samples. Despite the improved accuracy, several limitations remain unsolved. For example, the accuracy of measurement results depends on the size of valid samples due to delta-based sampling implementation, affecting performance consistency. Blas and López-de-Ipiña [6,59] used BLE beacons with improved trilateration to enhance the estimated location’s outcome. This system is examined in university faculties to locate a professor or staff. The application range of BLE beacon is up to 30 or 70 m depending on the properties of manufacturers. The mean value of measurement error is close to four meters, which does not meet the requirement of accuracy. As a result, the performance of the BLE is not attractive in the indoor localization field.
2.3. ZigBee
ZigBee is an emerging technology built based on the IEEE 802.15.4 standard. The ZigBee is often used in creating low cost, low data rate, and energy-efficient personal area network [24].
Some researchers exploited the ZigBee system as the localization technique and tested its applicability in the smart home environment. The performance of ZigBee was evaluated coarsely, room level space used the RSSI proximity-based algorithm. The results indicated the ZigBee have high sensitivity and great energy efficiency of localization. However, this study did not illustrate the values of positioning error [60]. Jan Blumenthal et al. [61] used the weight centroid localization (WCL) algorithm to improve the calculated position of ZigBee in real implementation. And the averaged localization error is 2.6 meters (m) in a grid aligned sensor network, but the beacon distance is only 10 m. Another research group revealed the positioning error of sensor-to-target distance estimation of ZigBee is 1.5–2 m, but this value was collected in the LOS scenario with a high density of sensor nodes (0.27 nodes/m2) [43]. These data demonstrated the defects of ZigBee in the localization field. Since the ZigBee is a short-range communication system, only the vast array of sensors and nodes maintain a satisfactory accuracy level.
2.4. Ultra-Wideband (UWB)
The UWB technology has seen rapid development in the communication sector [6]. The UWB has gradually received attentions as a solution for indoor localization because of its immunity to interference from other signals and its excellent penetration of numerous materials [62]. UWB was tested in a corridor with a width of 2.5 m to mimic the location-awareness during museum visiting [63]. UWB tags are attached to each painting, and users carry a phone with UWB for positioning. The results have presented UWB has a sub-meter accuracy in the LOS scenario. Yet, the research group mentioned that NLOS conditions would seriously deteriorate the measurable range and accuracy. Furthermore, Guvenc et al. [26,64] proposed an NLOS identification system using multipath channel statistics in UWB packets. This study reports NLOS bias less than 2 m when applied in a rectangular room of size 30 m × 20 m. However, information about obstacles causing the NLOS in this experiment are thoroughly explained. It is important to know that the accuracy and applicable range of UWB and other sensing technologies can be greatly impacted by metallic or thick objects in smart homes that interfere with UWB signals.
Since UWB localization systems have high accuracy, some home-entertainment applications use this technology for precise positionings, such as the smart audio system that adopts UWB to adjust the sound according to users’ location and provide an optimum listening experience [6]. The researchers used one omnidirectional transmitting and four directional receiving antennas to detect the small movements of listeners’ chest in real-time. Moreover, the experiment validated the precise UWB localization system needs a very stable implementation environment with low jitter and high signal to noise ratios. As discussed above, although UWB has distinctive advantages of accurately localizing objects, there are several defects that block the implementation of UWB in the smart home localization [17]. First, the infrastructure cost of UWB is higher than other systems [62]. Furthermore, when the metal objects, such as common home appliances, hinder the propagation path, UWB has a poor reception range and accuracy.
2.5. Long Range (LoRa)
LoRa is a low-power wide-area network (LPWAN), and it is the physical layer of the LoRa communication technology [63]. long-range wide area network (LoRaWAN) is the media access control (MAC) layer of the LoRa [26,64]. It defines the communication protocol and system architecture for LoRa. LoRaWAN determines the battery lifetime, communication range, and the quality of service. LoRaWAN utilizes long-range star architecture instead of the more common mesh network architecture. In the star topology, the individual nodes need not forward the data from other nodes, which preserves the energy and increase the battery lifetime. The battery of some end instruments could work for more than ten years [6].
Since LoRa uses the chirp spread spectrum (CSS) modulation, which provides resilience against interfering and multipath effects, and broadens the communication range significantly [17], the maximum reception range would reach fifteen km in suburban and five km in urban areas [25,26]. The LoRaWAN specification also defined that LoRa transmits over the industrial scientific medical (ISM) bands [47,65], which are license-free bands. It reduces the implementation cost of LoRa. Moreover, the cheap nodes, end devices, and infrastructure further lower the implementation threshold.
Another advantage of LoRa is the lower center frequency compared to WiFi, BLE, and UWB. Signal attenuation increases with increasing center frequency [66], in both free space and through objects. Lower center frequency allows LoRa signals to penetrate through heavy objects of buildings (such as walls, floors, furniture, and electronic devices) [67] which is not possible with other sensing technologies. The capability to penetrate objects causing NLOS combined with the long-range reading makes LoRa a viable sensing technology for robust localization in large indoor spaces with various NLOS situations using a small number of static anchors. More specifically, a study on vehicle tracking in a large indoor parking garage (180 m × 80 m) shows promising localization results with only three anchors [68]. Since buildings commonly have various objects blocking the signals, using other sensing technologies that do not penetrate objects well would require several anchors installed to make sure a certain number of anchors are seen from all the localizations in the building. Even though UWB with a large frequency bandwidth has the highest accuracy and precision in LOS, the performance of UWB can be significantly reduced by various objects in smart homes causing NLOS conditions. Additionally, a large frequency bandwidth requires using a larger center frequency which can drastically impact the maximum range and penetration of UWB signals through various objects. Similarly, WiFi and BLE cannot achieve high communication range and high penetration compared to LoRa. Another research study shows that LoRa has better localization accuracy (0.7 m–3.72 m) than BLE (1.53 m–26.46 m) and WiFi (0.5 m–4.06 m) in indoor environments [25]. Beyond the accuracy and coverage (maximum range), LoRa has lower power consumption than WiFi and UWB, and similar power consumption as RFID and BLE [69,70]. LoRa outperforms RFID in maximum range of communication, mainly because of the difference in their modulations. RFID is not specifically designed for long-range communication nor localization.
Because of the strengths in penetration, long-distance, low-cost, and energy-efficient transmission, LoRa can be used for the development of robust indoor localization systems resilient against changes. An indoor localization system using sensing technology without LoRa’s penetration capability requires careful installation of several anchors considering the building configuration and objects in the building to make sure all the locations in the building are in LOS situation. Furthermore, locations of anchors need to be adjusted to cope with slight changes of configuration of the space, such as placement of furniture and electronic devices. Since LoRa signals can penetrate objects at long distance, the indoor localization system based on LoRa can assure continuous and robust location tracking of objects in a building. For example, the location of a tag in a small and confined space covered with thick walls in a building can be tracked continuously without additional anchors in the confined space.
Despite the great potential of LoRa for indoor localization, not much is known about how LoRa-based localization would perform in a home with LOS and NLOS situations. Even though a couple of studies attempted to evaluate LoRa in indoor localization [71], the knowledge gained from these studies is highly limited because the configurations of the test environments are mostly unknown, and the results of localization were analyzed without providing the description on the LOS and NLOS situations impacting the performances. For instance, [25] reported 0.76 m–3.72 m combined an accuracy without thoroughly explaining the configurations of the test environment. This study did not describe what LOS situations and NLOS situations were created in the environment using what type of building objects and electronic devices and how the situations impacted the performance of localization. Rather than rough descriptions of the test conditions such as “NLOS caused by varying walls”, the performance of LoRa should evaluated revealing the relations between the configuration of the test environment and their impact on the performances.
2.6. Objectives and Scope
To overcome the limitation, this study investigates the feasibility of applying LoRa for smart home localization. Especially, this study focuses on indoor localization of typical residential apartments. Thus, the research team needs to identify whether the 2D location of a LoRa tag can be tracked under LOS and NLOS conditions, which are commonly encountered in a furnished apartment, with a limited number of static anchors. To this end, the team carried out an experiment for LoRa that evaluated the accuracy of ranging and trilateration without continuous retraining or system configurations under both LOS and NLOS conditions. This study also focuses on determining the locations of static tags instead of dynamically moving tags the accuracy of which could potentially be impacted by movements. The impact of dynamic motion, speed, and placement of LoRa tags on the localization performance would be investigated in a separate study in the future.
3. Experiment and Evaluation
In this section, we evaluate the idea of LoRa localization in an indoor environment.
3.1. Experimental Setup
First, the research team discusses our experimental setup, including a testing environment, a data collection platform and protocol, and a radio configuration in the experiments of this research.
3.1.1. Testing Environment
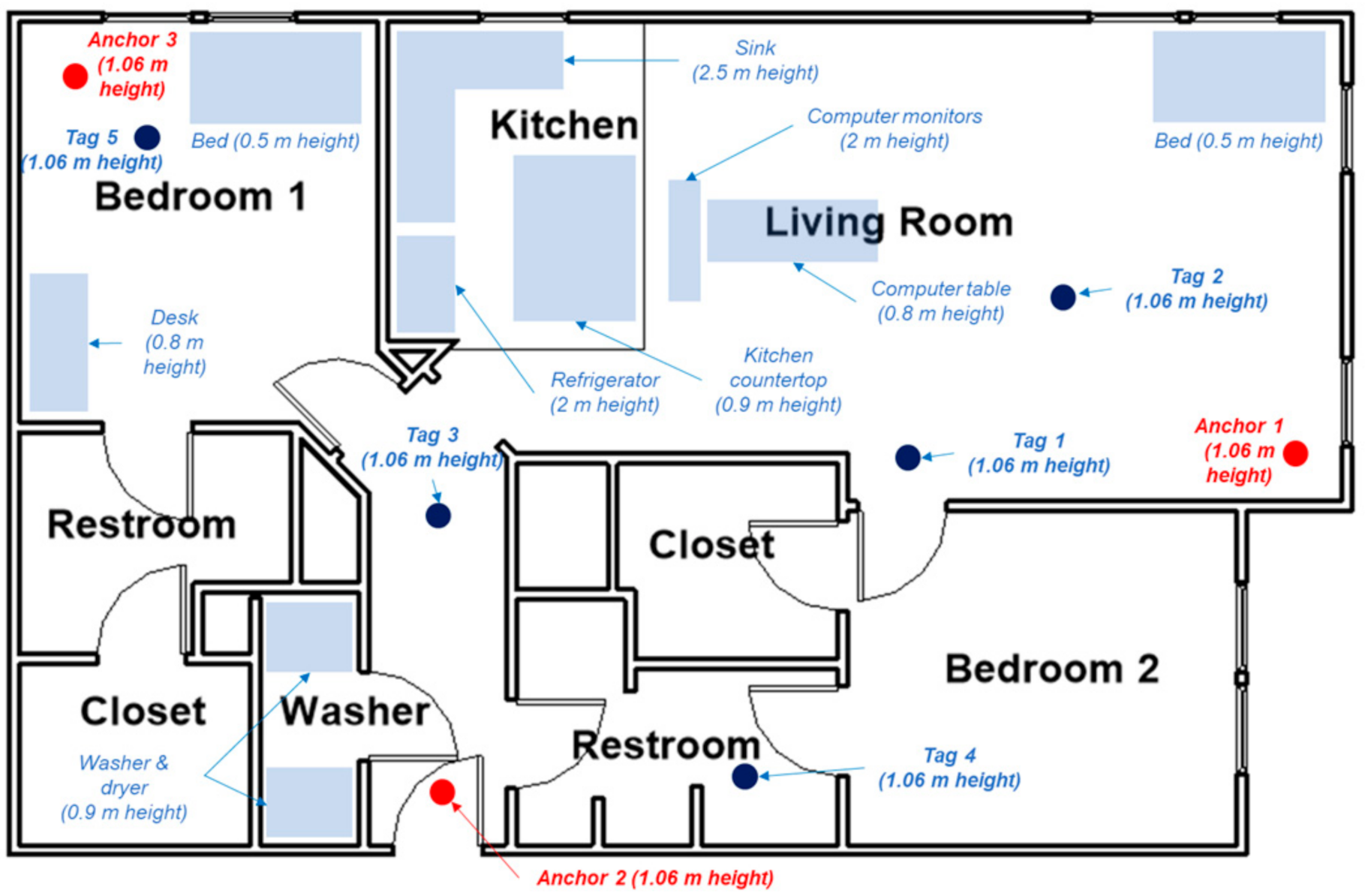
The research team conducts a data collection in a 114.4 m2 (1,231 sq-ft) furnished apartment, as shown in Figure 1. We place our LoRa nodes, at a fixed height of 1.06 m (3.48 ft) which is the height of the waist of a person, to cover different scenarios of tracking persons that generally exist in homes. The appliances and the furniture in the apartment that can cause reflections and NLOS for LoRa communication, include walls, refrigerator, sink, kitchen countertop, beds, desk, computer table, computer monitor, washer, and dryer. NLOS and reflections both cause inaccuracies in range measurements between tags and anchors.
3.1.2. Data Collection
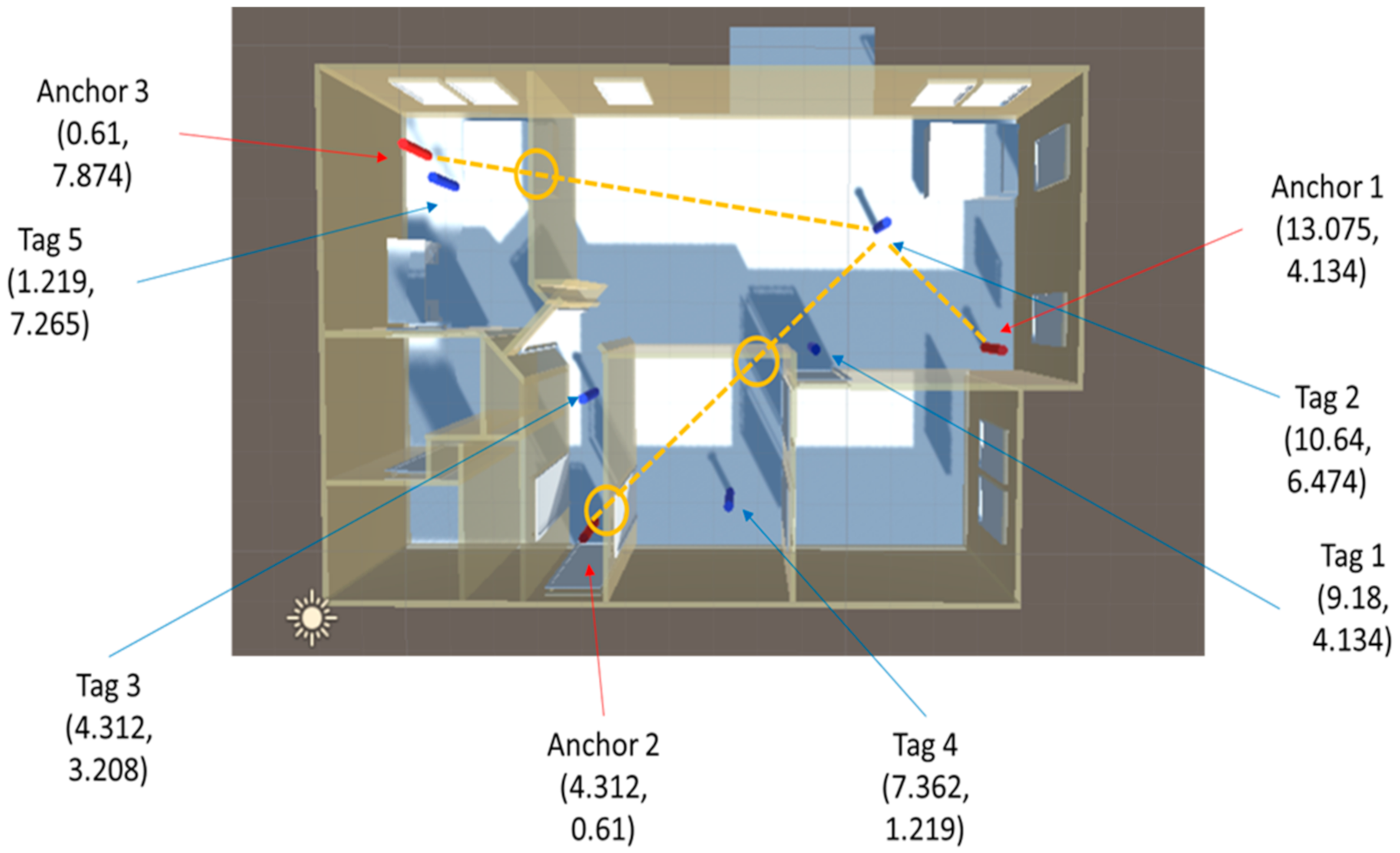
In our experiments, we use Adafruit Feather 32u4 RFM95 LoRa radio, capable of only operating on 868 MHz (European ISM) and 915 MHz (American ISM). We chose 915 MHz band to be compliant with the Federal Communications Commission (FCC) regulations. We equipped each board with a 900 MHz external antenna to achieve better signal strength. As shown in Figure 1 and Figure 2, we use three anchors and five tags. Tags are connected through USB cables to a laptop, where the experiment is controlled by a Python script. The script sends a command to each tag at a time, requesting a set of RSSI measurements with all anchors with a specified TX power. The tag then sends a packet with the specified TX power to each anchor at a time, requesting an RSSI measurement. The packet contains the TX power number that the anchor should use. On the reception of this request by the anchor, it records RSSI and is included in the response packet. The tag receives the response packet and records the RSSI. Finally, the tag logs this measurement by specifying RSSI measured at both sides. In our experiments we set the LoRa nodes to use a bandwidth of 125 kHz, a coding rate of 4/5, a spreading factor of 8, and a preamble length of 8. We collect various data with different TX power levels between 5 dB and 23 dB. For localization experiments, we collect approximately 2000 RSSI measurements at each five tags from each three anchors.
3.2. Calibration
As the first step, we collect calibration data to identify the correlation between RSSI and distances. We use this correlation to map the RSSI measurements to distances in our ranging and localization experiments.
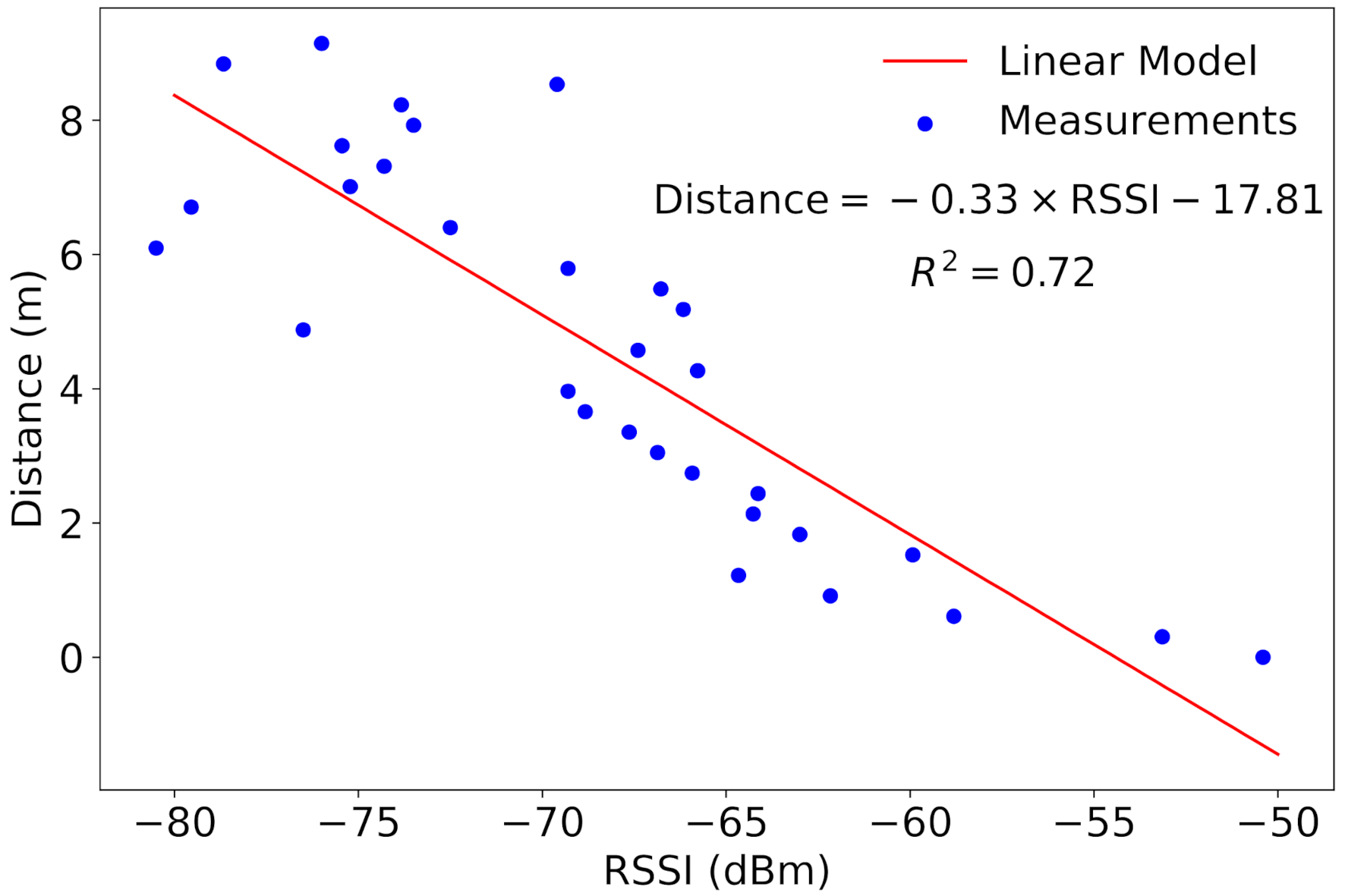
We also collect the calibration data using one anchor and one tag in the same apartment as the rest of the experiments. We increase the distance from 0 m to 10 m and measured RSSI at every 30 cm with TX power levels of 5, 10, 15, 20, and 23 dB. Finally, we map RSSI to distance using linear and the 3rd degree polynomial. Linear mapping results in the best fitting model.
The result of linear mapping for TX power of 5 dB is shown in Figure 3. The equation is:
Although R2 is 0.72, in practice we observe that the performance of the linear model is better than the 3rd degree polynomial. The calibration model is different for each TX power level, but we do not observe any difference in the ranging performance when using different TX power levels.
3.3. Ranging Performance
We first evaluate the performance of LoRa for ranging. For each anchor node we calculate the ranging error with each tag by comparing the ground truth distance (by calculating the Euclidean distance between the actual position of tag and anchor) with the measured distance (mapped from measured RSSI using the calibration model from the previous section).
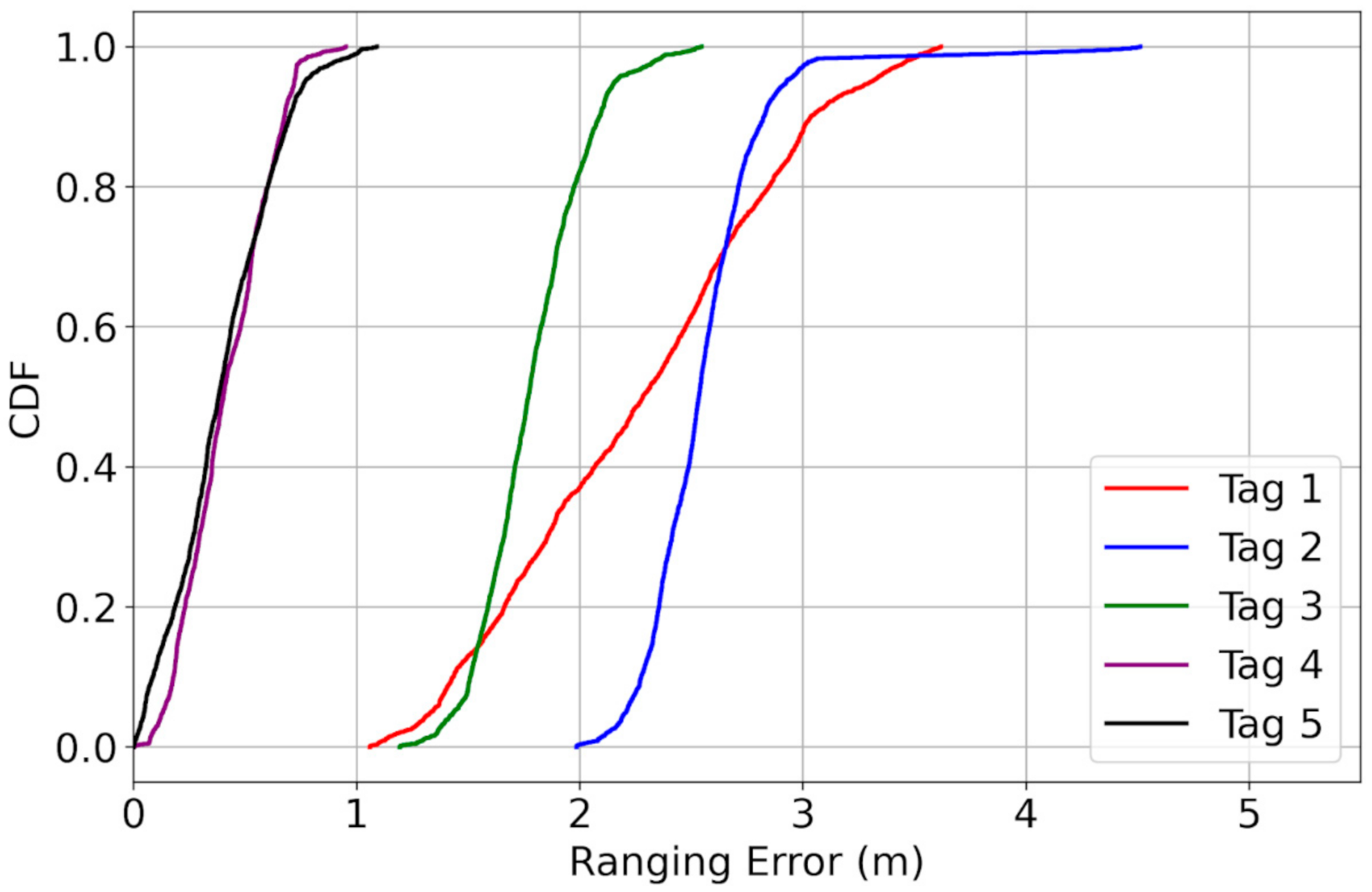
Next, we look at the distribution of ranging error for each anchor and tag. Figure 4, Figure 5 and Figure 6 present the distribution of ranging error for each anchor and all 5 tags. Table 2 indicates the summary of ranging error for all three anchors and five tags. In most cases the ranging error is below 2 m, except for a few NLOS cases where it leads to a large ranging error. We discuss the results in detail as follows. One thing to note is that even though the ranging errors go up to a few meters (lower accuracy), the ranging precision is still very high. In fact, the standard deviation remains below 1 m for the worst case and we have below 20 cm for the best case.
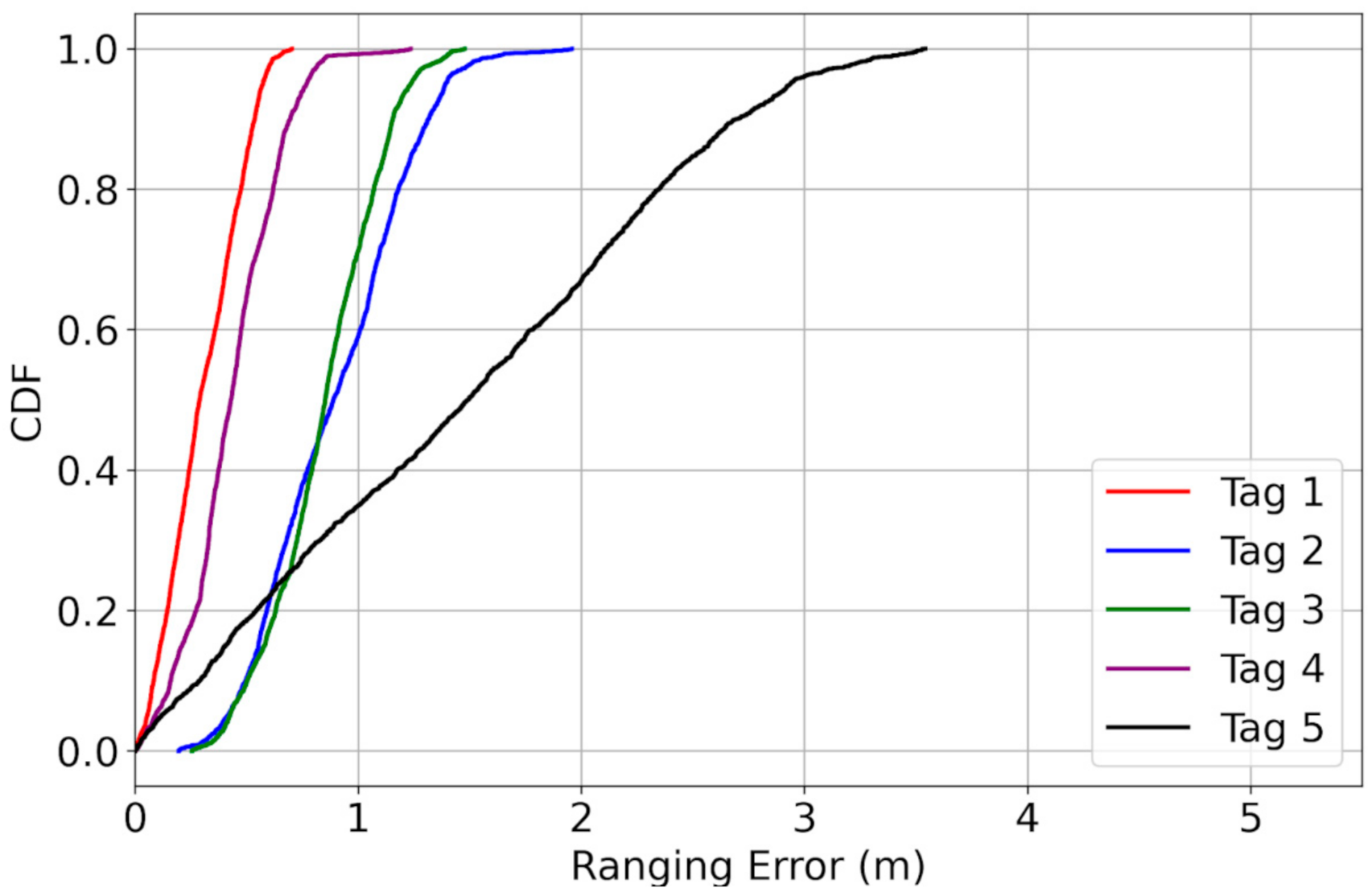
Figure 4 presents the cumulative distribution function (CDF) of ranging error for Anchor 1 and all five tags. The large error for Tag 5 is due to the NLOS condition caused by the kitchen area, exactly between Anchor 1 and Tag 5. All other tags have accuracies better than 2 m since they are either in complete LOS or they are only partially in NLOS caused by the walls.
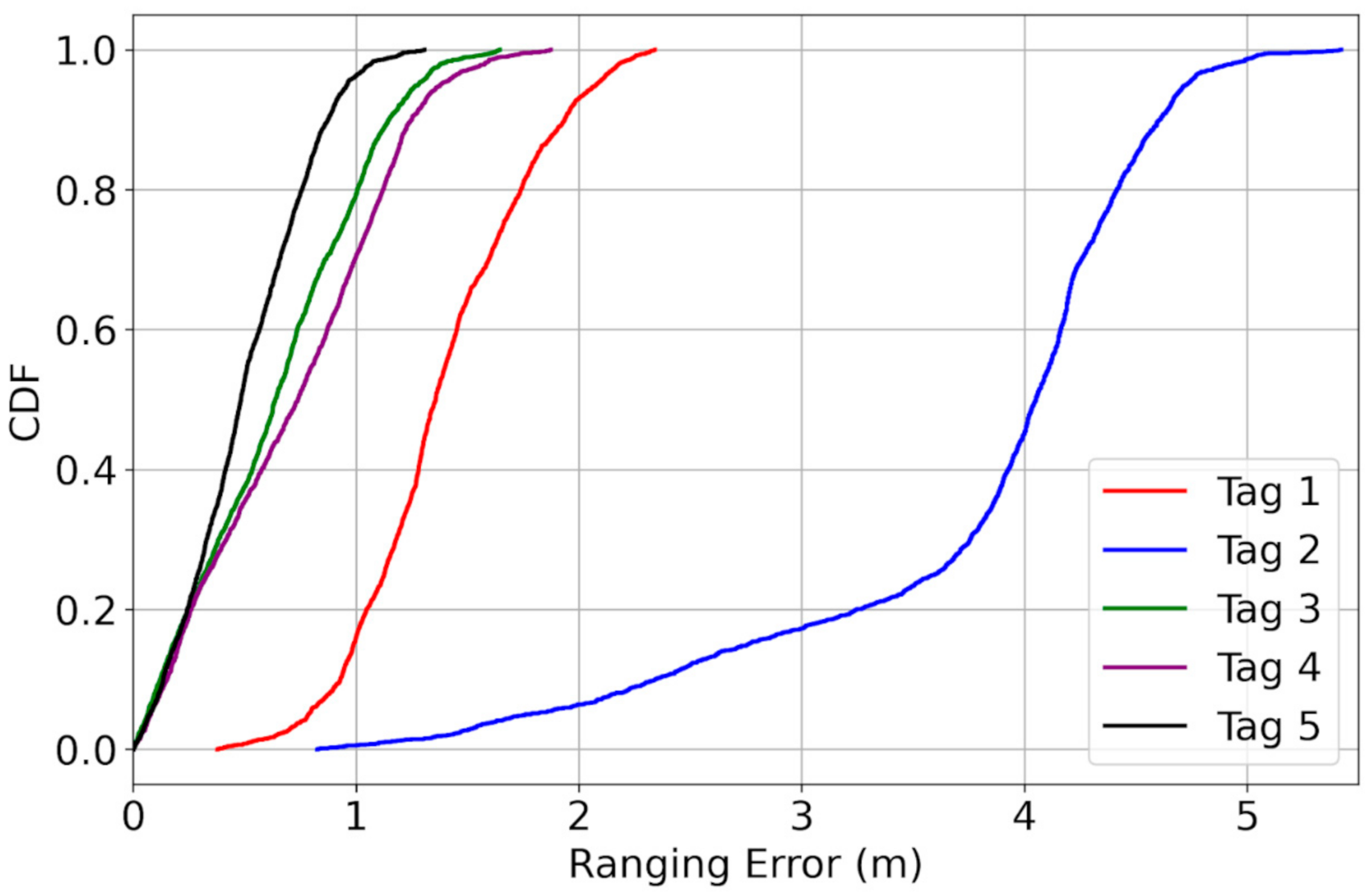
Figure 5 presents the CDF of ranging error for Anchor 2 and all five tags. The larger errors for Tags 1 and 2 are due to NLOS caused by walls and possibly other objects in the closet area and restroom. The accuracy for Tag 3 is most likely affected by reflections from objects and walls.
Figure 6 shows the CDF of ranging error for Anchor 3 and all five tags. The large error for Tag 2 is because of the NLOS condition caused by the kitchen area, exactly between Anchor 3 and Tag 2.
3.4. Localization Performance
Finally, we evaluate the performance of LoRa in estimating the location of tags in an indoor environment. We use the same data as the previous evaluation and run a trilateration algorithm on the range measurements using least square estimation (LSE) method similar with [71], solved by quasi-Newton BFGS method, with the following cost figure:
where is the measured distance with anchor and is the parametric (with and coordinates) distance with anchor as follows:
We run the algorithm for each 5 measurements from all anchors to estimate one tag location. From the 2000 measurements between each tag and anchor, we get 400 location estimates for each tag. And then, we calculate the Euclidean distance between the ground truth location and estimated location of each tag to get the localization error.
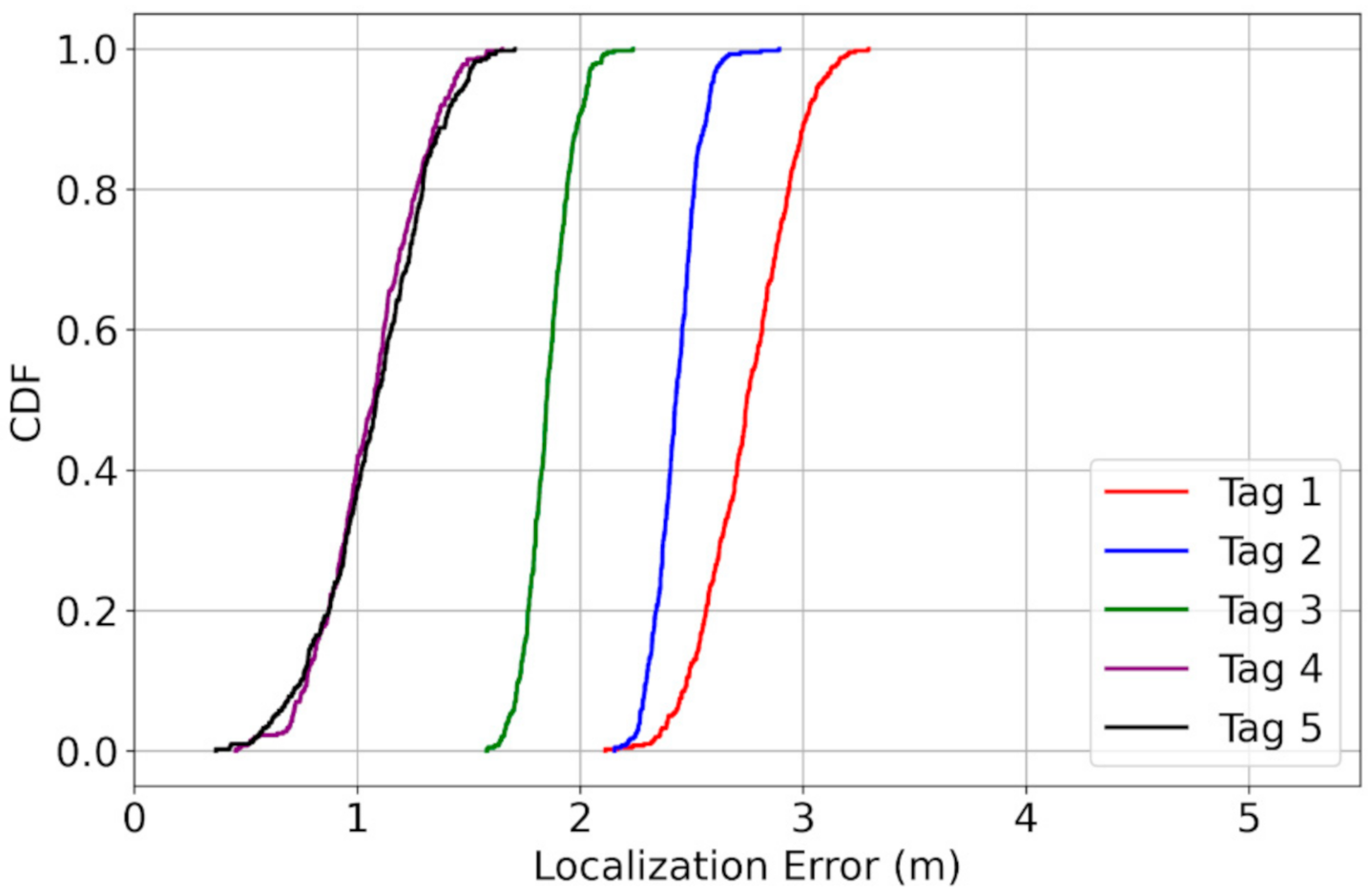
Table 3 is the summary of localization error and CDF or localization errors in Figure 7. Tags 4 and 5 have errors below 1.6 m, while other tags (1, 2, and 3) have errors up to 3.2 m. The reason for the larger error of these tags is intuitive from the ranging performance results. Tag 1 has large ranging errors with Anchor 2, Tag 2 has large ranging errors with Anchors 2 and 3, and Tag 3 has large ranging errors with Anchor 2. On average, our localization error is better than 2.75 m, even in NLOS.
One thing to note is that even though the localization error goes up to 3.2 m (lower accuracy), the precision is still very high. The standard deviation remains below 25 cm.
4. Discussion
4.1. Accuracy
Although the accuracy of implementation of LoRa localization is better than 3.2 m, it may be desirable to improve the accuracy depending on the application. We discuss three potential solutions to improve the localization accuracy, especially in the NLOS conditions. Similar solutions have been discussed in the literature in this area, but it is still worth exploring such ideas in the context of indoor localization in home setting.
1- Filtering: In the presence of multiple location estimates, we can use signal filtering techniques, such as low-pass filtering, to detect and mitigate any spurious or sudden changes in the signal power.
2- Anchor selection: With more than three anchor nodes available, we can choose the best subset of anchor nodes to provide more accurate location estimate. We can select the best of anchors by monitoring a signal quality measure such as RSSI.
3- Different localization schemes: Instead of RSSI, we might be able to use time-of-arrival (TOA) or time-difference-of-arrival (TDOA) techniques.
4- Geometric correction: Since the standard deviation of error is small in all cases, we only have the accuracy problem which can potentially be corrected with the knowledge of the geometry of the environment or using fingerprinting techniques.
4.2. Scalability
With the increase in the number of anchor nodes and tag nodes, it might be necessary to make localization protocol more efficient to avoid packet collisions. For example, if the number of anchors is considerably lower than the number of tags, we can send packets from anchors only. In this case, the tag nodes only receive on the channel and do not cause any packet collisions. The calculated RSSI then can either be used on the tags (self-localization) or stored and transferred later via another wireless radio to a central server (tracking).
4.3. Localization
In our work, we discuss 2D localization with LoRa. In some scenarios (e.g., multi-floor buildings), it might be of interest to estimate the elevation of tags. In such cases, we need to install more LoRa nodes with different elevations to be able to localize tags in 3D.
5. Conclusions
LoRa is one of wireless telecommunications systems, and this system could provide long-range, low-power, low-bitrate data transmission. Meanwhile, LoRa has a strong performance of interference elimination and high network efficiency. These characteristics reveal that LoRa could be potentially used in the IoT and location-based services (LBS).
This research demonstrates the feasibility of LoRa for indoor localization applications. Firstly, we compare the strengths and weaknesses of existing technologies used for indoor localization. Then, the practical experiment evaluates the accuracy and the precision of LoRa localization in both LOS and NLOS conditions in a furnished home setting where the localization area is relatively smaller than offices or corporate buildings. The experimental results show that LoRa localization could achieve accuracies better than 1.6 m in LOS and 3.1 m in extreme NLOS conditions. In all cases, the precision is better than 25 cm. In addition, the results suggest that LoRa can be used for some indoor localization applications, even with a simple implementation without using any signal or data filtering. For instance, initial locations of multiple mobile assistive robots can be estimated without input from human users. Initial pose estimate is an important step in indoor robot localization followed by probabilistic adjustment of the location and orientation using sensors attached to the robots. With longer range communication and higher penetration capabilities, LoRa can be considered a promising technology that combines communication and localization.
After our preliminary experiments, a few problems related to the LoRa’s use in the smart home indoor localization are revealed and they need to be studied in future research. For example, the accuracy of indoor localization can be increased by optimizing the three-dimensional positioning algorithm to satisfy more application scenarios. By doing so, coordinates of tags can be more accurately determined to allow users to locate objects, such as small electronic devices, in the building precisely. The 3.1 m accuracy under NLOS in this study would still benefit users to find objects easily or utilize location-based assistance using the rough coordinates of tags. However, more precise locations obtained by optimizing the performances could reduce potential errors, such as false alarms and incorrect locations of objects. Also, the LoRa localization technology system could extend into mobile applications, which lets end-users access the needed location-based information anytime and anywhere. Our research team will conduct further studies to improve the applicability of LoRa in smart home indoor localization.
Author Contributions
Conceptualization, K.K. and J.I.K.; methodology, K.K. and M.H.; software development, M.H. and N.S.; hardware protoyping, M.H.; validation, K.K. and M.J.S.; formal analysis, N.S. and O.G.; investigation, W.S.; data curation, O.G.; writing—original draft preparation, S.L. and J.I.K.; writing—review and editing, W.S. and M.J.S.; visualization, S.L. and N.S.; supervision, K.K. and J.I.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by City University of Hong Kong, grant number 7200593.
Institutional Review Board Statement
Not appliable.
Informed Consent Statement
Not appliable.
Data Availability Statement
Not appliable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Alam, M.R.; Reaz, M.B.I.; Ali, M.A.M. A review of smart homes–Past, present, and future. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2012, 42, 1190–1203. [Google Scholar] [CrossRef]
- Ghourchian, N.; Allegue-Martinez, M.; Precup, D. Real-Time Indoor Localization in Smart Homes Using Semi-Supervised Learning. In Proceedings of the 29th Innovative Applications of Artificial Intelligence Conference, San Francisco, CA, USA, 6–9 February 2017; pp. 1–8. [Google Scholar]
- Betke, M.; Gurvits, L. Mobile robot localization using landmarks. IEEE Trans. Robot. Autom. 1997, 13, 251–263. [Google Scholar] [CrossRef] [Green Version]
- Wireless Communications: Principles and Practice. Available online: http://ee.sharif.edu/~wireless.comm.net/references/Rappaport%20-%20Wireless%20Communications,Principles%20and%20Practice-ISBN%200130422320.pdf (accessed on 4 January 2021).
- Fundamentals of Wireless Communication. Available online: https://web.stanford.edu/~dntse/wireless_book.html (accessed on 4 January 2021).
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Domestic robotics. Available online: https://0-link-springer-com.brum.beds.ac.uk/chapter/10.1007/978-3-319-32552-1_65 (accessed on 4 January 2021).
- van Haute, T.; de Poorter, E.; Lemic, F.; Handziski, V.; Wirström, N.; Voigt, T.; Wolisz, A.; Moerman, I. Platform for benchmarking of RF-based indoor localization solutions. IEEE Commun. Mag. 2015, 53, 126–133. [Google Scholar] [CrossRef] [Green Version]
- Behboodi, A.; de Poorter, E.; Handziski, V.; Crombez, P.; de Las Heras, J.J.; Lemic, F.; Moerman, I.; van Haute, T.; Verhoeve, P.; Voigt, T.; et al. Evaluation of RF-based Indoor Localization Solutions for the Future Internet. In Proceedings of the Future Network and Mobile Summit 2013 Conference Proceedings, Lisbon, Portugal, 3–5 July 2013. [Google Scholar]
- Doberstein, D.; Doberstein, D. Introduction to the Global Positioning System. In Fundamentals of GPS Receivers; Springer: New York, NY, USA, 2012; pp. 23–37. ISBN 9781461404088. [Google Scholar]
- Olsen, E.A.; Park, C.W.; How, J.P. 3D formation flight using differential carrier-phase GPS sensors. Navig. J. Inst. Navig. 1999, 46, 35–48. [Google Scholar] [CrossRef]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. In Proceedings of the 1st IEEE International Conference on Pervasive Computing and Communications, PerCom 2003, Fort Worth, TX, USA, 23–26 March 2003; pp. 407–415. [Google Scholar]
- Jin, G.Y.; Lu, X.Y.; Park, M.S. An indoor localization mechanism using active RFID tag. In Proceedings of the IEEE International Conference on Sensor Networks, Ubiquitous, and Trustworthy Computing, Taichung, Taiwan, 5–7 June 2006; Volume 2006 II, pp. 40–43. [Google Scholar]
- Fortin-Simard, D.; Bouchard, K.; Gaboury, S.; Bouchard, B.; Bouzouane, A. Accurate passive RFID localization system for smart homes. In Proceedings of the 2012 IEEE 3rd International Conference on Networked Embedded Systems for Every Application, NESEA 2012, Liverpool, UK, 13–14 December 2012. [Google Scholar]
- Wu, H.; Wu, X.; Tian, G. Indoor robot localization based on single RFID tag. Artif. Life Robot. 2018, 23, 373–379. [Google Scholar] [CrossRef]
- Wang, C.S.; Huang, C.H.; Chen, Y.S.; Zheng, L.J. An implementation of positioning system in indoor environment based on active RFID. In Proceedings of the 2009 Joint Conferences on Pervasive Computing, JCPC 2009, Tamsui, Taipei, Taiwan, 3–5 December 2009; pp. 71–76. [Google Scholar]
- Razavi, S.N.; Haas, C.T. Using reference RFID tags for calibrating the estimated locations of construction materials. In Proceedings of the Automation in Construction; Elsevier: Amsterdam, The Netherlands, 2011; Volume 20, pp. 677–685. [Google Scholar]
- Design and Calibration of the SpotON Ad-Hoc Location Sensing System. Available online: http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.23.6231 (accessed on 4 January 2021).
- Chawla, V.; Ha, D.S. An Overview of Passive RFID. IEEE Commun. Mag. 2007, 45, 11–17. [Google Scholar] [CrossRef]
- Yu, K.; Oppermann, I. Performance of UWB position estimation based on time-of-arrival measurements. In Proceedings of the 2004 International Workshop on Ultra Wideband Systems; Joint with Conference on Ultra Wideband Systems and Technologies; Joint UWBST and IWUWBS 2004, Kyoto, Japan, 18–21 May 2004; pp. 400–404. [Google Scholar]
- Otim, T.; Bahillo, A.; Diez, L.E.; Lopez-Iturri, P.; Falcone, F. Towards Sub-Meter Level UWB Indoor Localization Using Body Wearable Sensors. IEEE Access 2020, 8, 178886–178899. [Google Scholar] [CrossRef]
- Faragher, R.; Harle, R. Location fingerprinting with bluetooth low energy beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Park, J.W.; Yang, X.; Cho, Y.K.; Seo, J. Improving dynamic proximity sensing and processing for smart work-zone safety. Autom. Constr. 2017, 84, 111–120. [Google Scholar] [CrossRef]
- Finding objects using UWB or BLE localization technology: A museum-like use case. Available online: https://0-ieeexplore-ieee-org.brum.beds.ac.uk/document/8115865 (accessed on 4 January 2021).
- LoRaIn: Making a Case for LoRa in Indoor Localization. Available online: https://0-ieeexplore-ieee-org.brum.beds.ac.uk/document/8730767 (accessed on 4 January 2021).
- Islam, B.; Islam, M.T.; Nirjon, S. Feasibility of LoRa for Indoor Localization. Available online: https://pdfs.semanticscholar.org/ab00/c1eacbdd76732b7438ec8e5653f7c875def4.pdf (accessed on 4 January 2021).
- Chen, Y.; Han, D. Water quality monitoring in smart city: A pilot project. Autom. Constr. 2018, 89, 307–316. [Google Scholar] [CrossRef] [Green Version]
- Teizer, J.; Neve, H.; Li, H.; Wandahl, S.; König, J.; Ochner, B.; König, M.; Lerche, J. Construction resource efficiency improvement by Long Range Wide Area Network tracking and monitoring. Autom. Constr. 2020, 116, 103245. [Google Scholar] [CrossRef]
- Kwant.ai Partners with Global LoRaWAN® Leader Actility to Offer Advanced IoT Solutions for Smart Construction. Available online: https://www.kwant.ai/blog/2020/10/20/kwantai-partners-with-global-lorawan-leader-actility-to-offer-advanced-iot-solutions-for-smart-construction (accessed on 7 November 2020).
- Fang, Y.; Cho, Y.K.; Zhang, S.; Perez, E. Case Study of BIM and Cloud–Enabled Real-Time RFID Indoor Localization for Construction Management Applications. J. Constr. Eng. Manag. 2016, 142, 05016003. [Google Scholar] [CrossRef]
- Jaselskis, E.J.; El-Misalami, T. Implementing Radio Frequency Identification in the Construction Process. J. Constr. Eng. Manag. 2003, 129, 680–688. [Google Scholar] [CrossRef]
- Yabuki, N.; Oyama, T. Application of radio frequency identification technology for management of light weight temporary facility members. Available online: https://ascelibrary.org/doi/abs/10.1061/40937%28261%2983 (accessed on 4 January 2021).
- Vorst, P.; Schneegans, S.; Yang, B.; Zell, A. Self-localization with RFID snapshots in densely tagged environments. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS, Nice, France, 22–26 September 2008; pp. 1353–1358. [Google Scholar]
- Baeg, S.H.; Park, J.H.; Koh, J.; Park, K.W.; Baeg, M.H. Building a smart home environment for service robots based on RFID and sensor networks. In Proceedings of the ICCAS 2007–International Conference on Control, Automation and Systems, Seoul, Korea, 17–20 October 2007; pp. 1078–1082. [Google Scholar]
- Huynh, S.; Parry, D.; Fong, A.C.M.; Tang, J. Novel RFID and ontology based home localization system for misplaced objects. IEEE Trans. Consum. Electron. 2014, 60, 402–410. [Google Scholar] [CrossRef] [Green Version]
- Park, J.; Kim, K.; Cho, Y.K. Framework of Automated Construction-Safety Monitoring Using Cloud-Enabled BIM and BLE Mobile Tracking Sensors. J. Constr. Eng. Manag. 2017, 143, 05016019. [Google Scholar] [CrossRef]
- Park, J.; Marks, E.; Cho, Y.K.; Suryanto, W. Performance Test of Wireless Technologies for Personnel and Equipment Proximity Sensing in Work Zones. J. Constr. Eng. Manag. 2016, 142, 04015049. [Google Scholar] [CrossRef]
- Mokhtari, G.; Anvari-Moghaddam, A.; Zhang, Q.; Karunanithi, M. Multi-residential activity labelling in smart homes with wearable tags using BLE technology. Sensors 2018, 18, 908. [Google Scholar] [CrossRef] [Green Version]
- localization using RSSI measurements and iRingLA. Available online: https://hal.archives-ouvertes.fr/hal-01387824/document (accessed on 4 January 2021).
- Huh, J.H.; Bu, Y.; Seo, K. Bluetooth-tracing RSSI sampling method as basic technology of indoor localization for smart homes. Int. J. Smart Home 2016, 10, 9–22. [Google Scholar] [CrossRef]
- Smaoui, N.; Kim, K.; Gnawali, O.; Lee, Y.J.; Suh, W. Respirable dust monitoring in construction sites and visualization in building information modeling using real-time sensor data. Sens. Mater. 2018, 30, 1775–1786. [Google Scholar] [CrossRef] [Green Version]
- Teizer, J.; Venugopal, M.; Walia, A. Ultrawideband for automated real-time three-dimensional location sensing for workforce, equipment, and material positioning and tracking. Transp. Res. Rec. 2008, 56–64. [Google Scholar] [CrossRef]
- Zetik, R.; Shen, G.; Thomä, R.S. Evaluation of requirements for UWB localization systems in home-entertainment applications. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, IPIN 2010–Conference Proceedings; Zurich, Switzerland, 15–17 September 2010. [Google Scholar]
- Monica, S.; Ferrari, G. Accurate indoor localization with UWB wireless sensor networks. In Proceedings of the Workshop on Enabling Technologies: Infrastructure for Collaborative Enterprises, WETICE, Parma, Italy, 23–25 June 2014; pp. 287–289. [Google Scholar]
- Cemin, Z.; Kuhn, M.; Merkl, B.; Fathy, A.E.; Mahfouz, M. Accurate UWB indoor localization system utilizing time difference of arrival approach. In Proceedings of the 2006 IEEE Radio and Wireless Symposium, San Diego, CA, USA, 17–19 January 2006; Volume 2006, pp. 515–518. [Google Scholar]
- Towards location enhanced IoT: Characterization of LoRa signal for wide area localization. Available online: https://0-ieeexplore-ieee-org.brum.beds.ac.uk/document/8559844 (accessed on 4 January 2021).
- LoRa-based localization systems for noisy outdoor environment. Available online: https://www.medsci.cn/sci/show_paper.asp?id=f67a8115e3c6569a (accessed on 4 January 2021).
- Cheng, C.S.; Chang, H.H.; Chen, Y.T.; Lin, T.H.; Chen, P.C.; Huang, C.M.; Yuan, H.S.; Chu, W.C. Accurate location tracking based on active RFID for health and safety monitoring. In Proceedings of the 3rd International Conference on Bioinformatics and Biomedical Engineering, iCBBE 2009, Beijing, China, 11–13 June 2009. [Google Scholar]
- Xuejing, J.; Ye, L.; Xiaolei, W. An Enhanced Approach of Indoor Location Sensing Using Active RFID. In Proceedings of the 2009 WASE International Conference on Information Engineering, ICIE 2009, Taiyuan, China, 10–11 July 2009; Volume 1, pp. 169–172. [Google Scholar]
- Active RFID-based localization using virtual reference elimination. Available online: https://0-ieeexplore-ieee-org.brum.beds.ac.uk/document/4343863 (accessed on 4 January 2021).
- Jain, S.; Sabharwal, A.; Chandra, S. An improvised localization scheme using active RFID for accurate tracking in smart homes. In Proceedings of the UKSim2010–UKSim 12th International Conference on Computer Modelling and Simulation, Cambridge, UK, 24–26 March 2010; pp. 51–56. [Google Scholar]
- IoT-based system for indoor location using bluetooth low energy. Available online: https://0-ieeexplore-ieee-org.brum.beds.ac.uk/document/8088211 (accessed on 4 January 2021).
- Bruno, R.; Delmastro, F. Design and analysis of a Bluetooth-based indoor localization system. Lect. Notes Comput. Sci. 2003, 2775, 711–725. [Google Scholar] [CrossRef] [Green Version]
- de Blas, A.; López-De-Ipiña, D. Improving trilateration for indoors localization using BLE beacons. In Proceedings of the 2017 2nd International Multidisciplinary Conference on Computer and Energy Science, SpliTech 2017, Split, Croatia, 12–14 July 2017. [Google Scholar]
- Baronti, P.; Pillai, P.; Chook, V.W.C.; Chessa, S.; Gotta, A.; Hu, Y.F. Wireless sensor networks: A survey on the state of the art and the 802.15.4 and ZigBee standards. Comput. Commun. 2007, 30, 1655–1695. [Google Scholar] [CrossRef]
- Bianchi, V.; Ciampolini, P.; de Munari, I. RSSI-Based Indoor Localization and Identification for ZigBee Wireless Sensor Networks in Smart Homes. IEEE Trans. Instrum. Meas. 2019, 68, 566–575. [Google Scholar] [CrossRef]
- Sugano, M.; Kawazoe, T.; Ohta, Y.; Murata, M. Indoor localization system using RSSI measurement of wireless sensor network based on ZigBee standard. In Proceedings of the 6th IASTED International Multi-Conference on Wireless and Optical Communications: Wireless Sensor Networks, WSN 2006, Banff, AB, Canada, 3–5 July 2006; pp. 503–508. [Google Scholar]
- Tsang, T.K.K.; El-Gamal, M.N. Ultra-wideband (UWB) communications systems: An overview. In Proceedings of the 3rd International IEEE Northeast Workshop on Circuits and Systems Conference, NEWCAS 2005, Montreal, QC, Canada, 19–22 June 2005; Volume 2005, pp. 381–386. [Google Scholar]
- Ridolfi, M.; van de Velde, S.; Steendam, H.; de Poorter, E. Analysis of the Scalability of UWB Indoor Localization Solutions for High User Densities. Sensors 2018, 18, 1875. [Google Scholar] [CrossRef] [Green Version]
- Guvenc, I.; Chong, C.C.; Watanabe, F. NLOS identification and mitigation for UWB localization systems. In Proceedings of the IEEE Wireless Communications and Networking Conference, WCNC, Hong Kong, China, 11–15 March 2007; pp. 1573–1578. [Google Scholar]
- Timmermann, D. Weighted centroid localization in Zigbee-based sensor networks. Available online: https://0-ieeexplore-ieee-org.brum.beds.ac.uk/document/4447528 (accessed on 4 January 2021).
- Zampella, F.; Jiménez, R.A.R.; Seco, F. Robust indoor positioning fusing PDR and RF technologies: The RFID and UWB case. Available online: https://0-ieeexplore-ieee-org.brum.beds.ac.uk/document/6817857 (accessed on 4 January 2020).
- An introduction to Sigfox and LoRa PHY and MAC layers to cite this version. Available online: https://hal.archives-ouvertes.fr/hal-01774080/document (accessed on 4 January 2021).
- Sinha, R.S.; Wei, Y.; Hwang, S.H. A survey on LPWA technology: LoRa and NB-IoT. ICT Express 2017, 3, 14–21. [Google Scholar] [CrossRef]
- Choi, W.; Chang, Y.S.; Jung, Y.; Song, J. Low-power LORa signal-based outdoor positioning using fingerprint algorithm. ISPRS Int. J. Geo-Inf. 2018, 7, 440. [Google Scholar] [CrossRef] [Green Version]
- Electromagnetic Signal Attenuation in Construction Materials. Available online: https://nvlpubs.nist.gov/nistpubs/Legacy/IR/nistir6055.pdf (accessed on 4 January 2021).
- Xu, W.; Kim, J.Y.; Huang, W.; Kanhere, S.S.; Jha, S.K.; Hu, W. Measurement, Characterization, and Modeling of LoRa Technology in Multifloor Buildings. IEEE Internet Things J. 2020, 7, 298–310. [Google Scholar] [CrossRef] [Green Version]
- Manzoni, P.; Calafate, C.T.; Cano, J.C.; Hernández-Orallo, E. Indoor vehicles geolocalization using LoRaWAN. Future Internet 2019, 11, 124. [Google Scholar] [CrossRef] [Green Version]
- Sadowski, S.; Spachos, P. RSSI-Based Indoor Localization with the Internet of Things. IEEE Access 2018, 6, 30149–30161. [Google Scholar] [CrossRef]
- Gu, C.; Jiang, L.; Tan, R. LoRa-based localization: Opportunities and challenges. arXiv 2018, arXiv:1812.11481. [Google Scholar]
- Gezici, S.; Tian, Z.; Giannakis, G.B.; Kobayashi, H.; Molisch, A.F.; Poor, H.V.; Sahinoglu, Z. Localization via ultra-wideband radios: A look at positioning aspects of future sensor networks. IEEE Signal Process. Mag. 2005, 22, 70–84. [Google Scholar] [CrossRef]
Figure 1.
A furnished two-bedroom apartment used as our testing environment. We used three anchor nodes (red circles) and 5 tags (dark blue circles) at a fixed height of 1.06 m (3.48 ft). Furniture and appliances cause NLOS and reflections for LoRa signals and impact the localization accuracy.
Figure 1.
A furnished two-bedroom apartment used as our testing environment. We used three anchor nodes (red circles) and 5 tags (dark blue circles) at a fixed height of 1.06 m (3.48 ft). Furniture and appliances cause NLOS and reflections for LoRa signals and impact the localization accuracy.

Figure 2.
Floor plan of the apartment with anchor/tag locations.

Figure 3.
RSSI to distance mapping for 5 dB of TX power, using a linear model.

Figure 4.
CDF of ranging error for Anchor 1 and all five tags. All tags show errors below 2 m except for Tag 5. The kitchen area is between Anchor 1 and Tag 5, causing NLOS conditions and affecting the ranging performance. Other tags are either in LOS or partial NLOS and have better accuracies.
Figure 4.
CDF of ranging error for Anchor 1 and all five tags. All tags show errors below 2 m except for Tag 5. The kitchen area is between Anchor 1 and Tag 5, causing NLOS conditions and affecting the ranging performance. Other tags are either in LOS or partial NLOS and have better accuracies.

Figure 5.
CDF of ranging error for Anchor 2 and all five tags. Tags 4 and 5 show errors below 1 m. Tag 2 has errors below 2.5 m. Other tags have larger errors due to NLOS caused by walls and possibly other things in the closet and restroom area.
Figure 5.
CDF of ranging error for Anchor 2 and all five tags. Tags 4 and 5 show errors below 1 m. Tag 2 has errors below 2.5 m. Other tags have larger errors due to NLOS caused by walls and possibly other things in the closet and restroom area.

Figure 6.
CDF of ranging error for Anchor 3 and all five tags. All tags show ranging errors below 2.5 m, except for Tag 2. The kitchen area is between Anchor 3 and Tag 2, causing NLOS conditions and affecting the ranging performance. Other tags are either in LOS or partial NLOS and have better accuracies.
Figure 6.
CDF of ranging error for Anchor 3 and all five tags. All tags show ranging errors below 2.5 m, except for Tag 2. The kitchen area is between Anchor 3 and Tag 2, causing NLOS conditions and affecting the ranging performance. Other tags are either in LOS or partial NLOS and have better accuracies.

Figure 7.
CDF of localization error for all five tags. Tags 4 and 5 have smaller errors compared to Tags 1, 2, and 3. The reason for larger errors for Tags 1, 2, and 3 is that they have larger ranging errors with at least one anchor (from ranging error).
Figure 7.
CDF of localization error for all five tags. Tags 4 and 5 have smaller errors compared to Tags 1, 2, and 3. The reason for larger errors for Tags 1, 2, and 3 is that they have larger ranging errors with at least one anchor (from ranging error).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Summary of sensing technologies applicable in smart home localization.
| Technology | Applications | Pros | Cons |
|---|---|---|---|
| Passive RFID | Working location tracking [30] Material tracking [31,32] Mobile robot’s self-localization [33] Activity recognition and assistance [14] | Cheap tags High energy efficiency | Short reception range Low accuracy Need a great amount of tags or antennas |
| Active RFID | Material tracking [17] Robot interaction with smart objects [34] User position tracking [16] Misplaced object positioning [35] | Longer reception range | Expensive tags Low accuracy Lower portability |
| BLE | Worker location tracking [36] Worker-equipment proximity detection [37] Residential activity labelling [38] Indoor localization in the smart home [39,40] | Long reception range Low energy consumption High acceptance Low cost of infrastructure | High susceptibility of other signals High packet-drop rate |
| UWB | Worker location tracking [41,42] Equipment tracking [43] User location-based adjustment of home-entertainment applications [44] Accurate indoor localization [45] | High accuracy of localizationImmune to interferenceHigh energy efficient | Short reception range High cost of infrastructure |
| LoRa | Outdoor localization [33,46,47] Not applied in construction | Long reception range Low cost High energy efficiency Penetration | Unexplored |
Table 2.
Summary of ranging error for each anchor and tag (50th: 50th percentile, 99th: 99th percentile).
Table 2.
Summary of ranging error for each anchor and tag (50th: 50th percentile, 99th: 99th percentile).
| Anchor 1 Ranging Error (m) | Anchor 2 Ranging Error (m) | Anchor 3 Ranging Error (m) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Avg | Std | 50th | 99th | Avg | Std | 50th | 99th | Avg | Std | 50th | 99th | |
| Tag 1 | 0.31 | 0.17 | 0.29 | 0.65 | 2.27 | 0.61 | 2.28 | 3.54 | 1.39 | 0.38 | 1.36 | 2.25 |
| Tag 2 | 0.90 | 0.32 | 0.89 | 1.63 | 2.56 | 0.28 | 2.54 | 3.86 | 3.79 | 0.88 | 4.05 | 5.03 |
| Tag 3 | 0.85 | 0.24 | 0.85 | 1.40 | 1.79 | 0.23 | 1.77 | 2.42 | 0.64 | 0.38 | 0.64 | 1.51 |
| Tag 4 | 0.44 | 0.20 | 0.43 | 0.86 | 0.42 | 0.19 | 0.40 | 0.84 | 0.72 | 0.42 | 0.74 | 1.65 |
| Tag 5 | 1.49 | 0.90 | 1.49 | 3.39 | 0.40 | 0.23 | 0.38 | 1.00 | 0.50 | 0.27 | 0.48 | 1.17 |
Table 3.
Summary of localization error (m) for each tag.
| Avg | Std | 50th | 75th | 90th | 99th | |
|---|---|---|---|---|---|---|
| Tag 1 | 2.75 | 0.21 | 2.75 | 2.90 | 3.01 | 3.19 |
| Tag 2 | 2.43 | 0.10 | 2.43 | 2.50 | 2.57 | 2.66 |
| Tag 3 | 1.86 | 0.10 | 1.85 | 1.93 | 1.99 | 2.10 |
| Tag 4 | 1.06 | 0.22 | 1.08 | 1.23 | 1.36 | 1.58 |
| Tag 5 | 1.08 | 0.25 | 1.09 | 1.26 | 1.40 | 1.59 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Kim, K.; Li, S.; Heydariaan, M.; Smaoui, N.; Gnawali, O.; Suh, W.; Suh, M.J.; Kim, J.I. Feasibility of LoRa for Smart Home Indoor Localization. Appl. Sci. 2021, 11, 415. https://0-doi-org.brum.beds.ac.uk/10.3390/app11010415
AMA Style
Kim K, Li S, Heydariaan M, Smaoui N, Gnawali O, Suh W, Suh MJ, Kim JI. Feasibility of LoRa for Smart Home Indoor Localization. Applied Sciences. 2021; 11(1):415. https://0-doi-org.brum.beds.ac.uk/10.3390/app11010415
Chicago/Turabian StyleKim, Kyungki, Sining Li, Milad Heydariaan, Nour Smaoui, Omprakash Gnawali, Wonho Suh, Min Jae Suh, and Jung In Kim. 2021. "Feasibility of LoRa for Smart Home Indoor Localization" Applied Sciences 11, no. 1: 415. https://0-doi-org.brum.beds.ac.uk/10.3390/app11010415
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.