
Dynamic Modeling and Control of a Parallel Mechanism Used in the Propulsion System of a Biomimetic Underwater Vehicle

 ,
, 


Abstract
:Featured Application
Abstract
1. Introduction
2. Materials and Methods
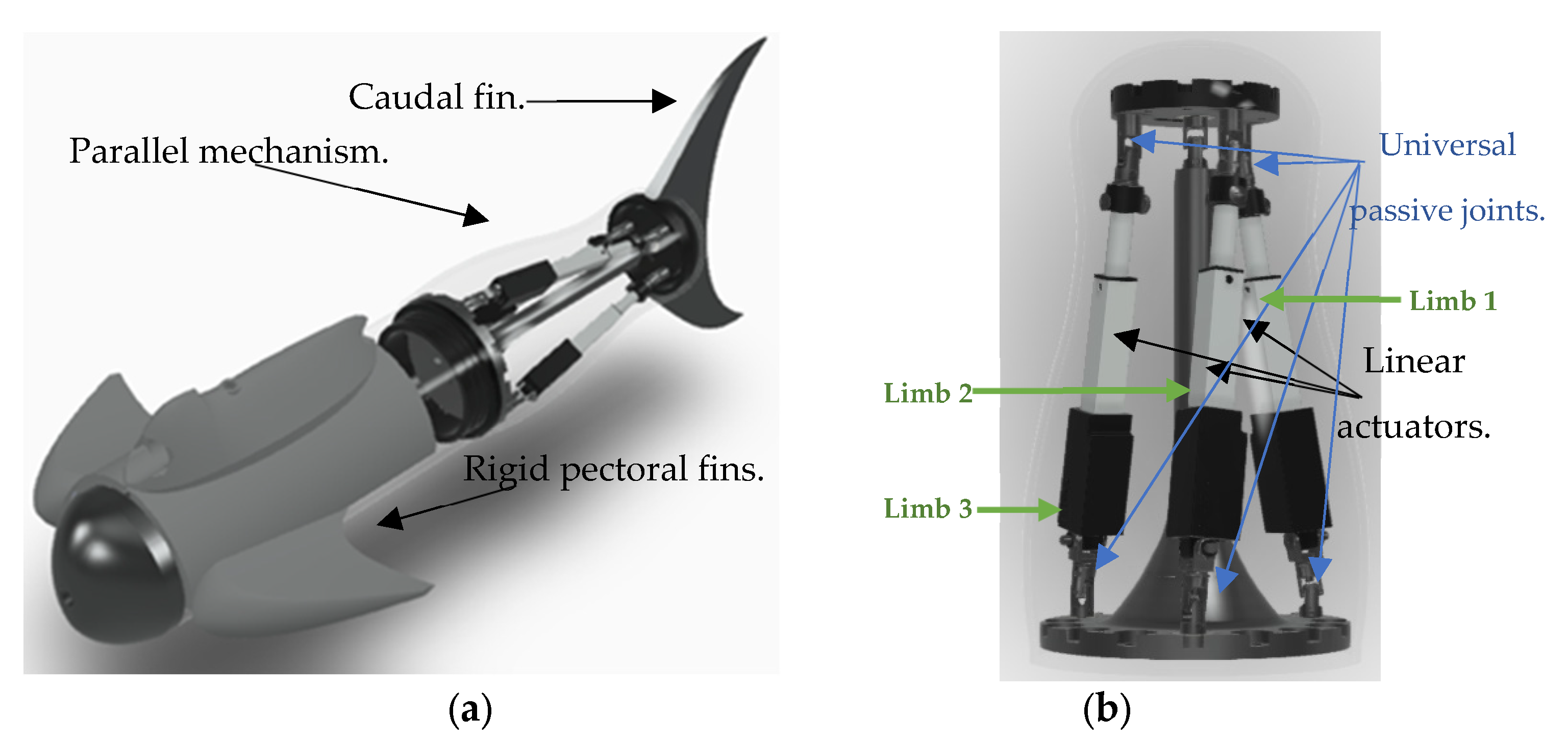
2.1. Propulsion System’s Configuration
- The caudal fin is attached to the moving platform. Thrust to the vehicle will be generated by the water displacement produced by the caudal fin. Hence, proper motion control in the platform’s oscillation and frequency is of great interest.
- Three limbs are responsible for moving the platform. The parallel mechanism contains three robotic arms with the same configuration. Each limb contains four passive (non-actuated) universal joints at the beginning and at the end where platforms are attached. One linear (prismatic) actuator is placed between such passive joints and is the responsible of the motion generation for each limb.
- The first limb always acts as a pivot. This configuration is helpful when controlling the flapping motion from the platform. This means that the oscillation from the moving platform will be caused by moving only limbs 2 and 3.
- No translational motion is desired. The incorporation of a fourth restrictive limb with spherical joint at its end links the origins of both platforms. This causes distance from both origins to always stay constant.
- The rotational motion of the platform is analyzed based on the Euler angles disposition and measured respect to an inertial frame fixed on the origin of the fixed platform. Considering that only limbs 2 and 3 cause the moving platform’s oscillation, only two rotational motions of roll () and yaw () are produced. The roll motion is produced over the Y axis and presents a total range from . Moreover, the yaw motion is produced over the Z axis and it takes values of for vertical flapping and 90 for horizontal flapping. Finally, it is desired that rotational motion from the platform could reach flapping frequencies ranging from 0.5 to 5 Hz.
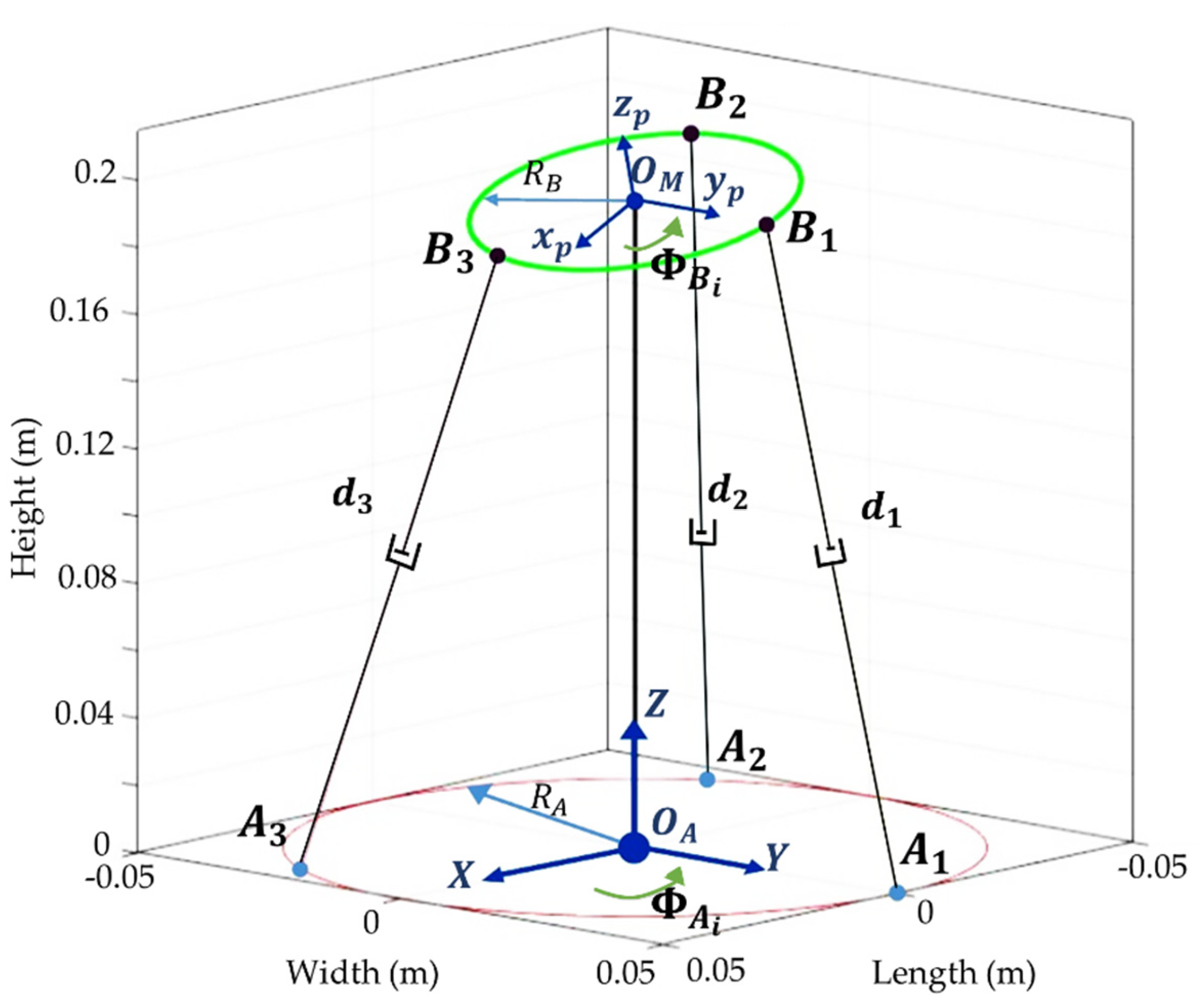
2.2. Propulsion System’s Kinematics Modeling
2.2.1. Platform’s Kinematics
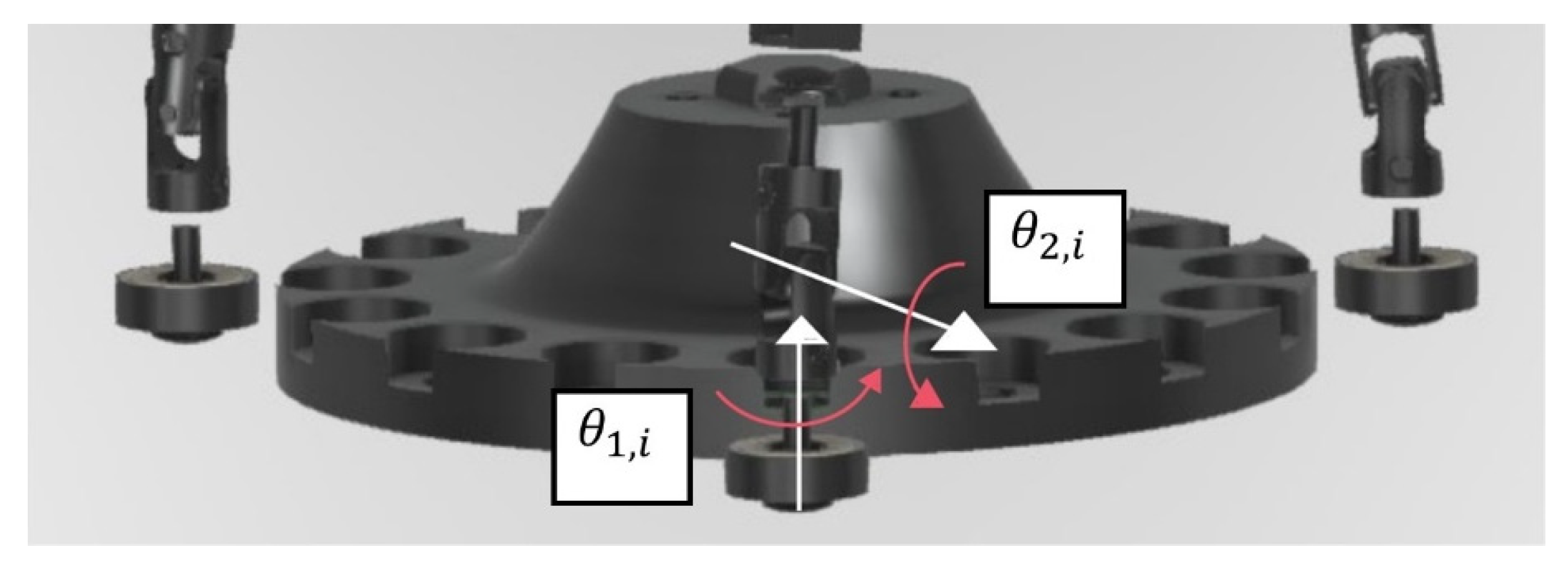
2.2.2. Limbs’ Inverse Kinematics
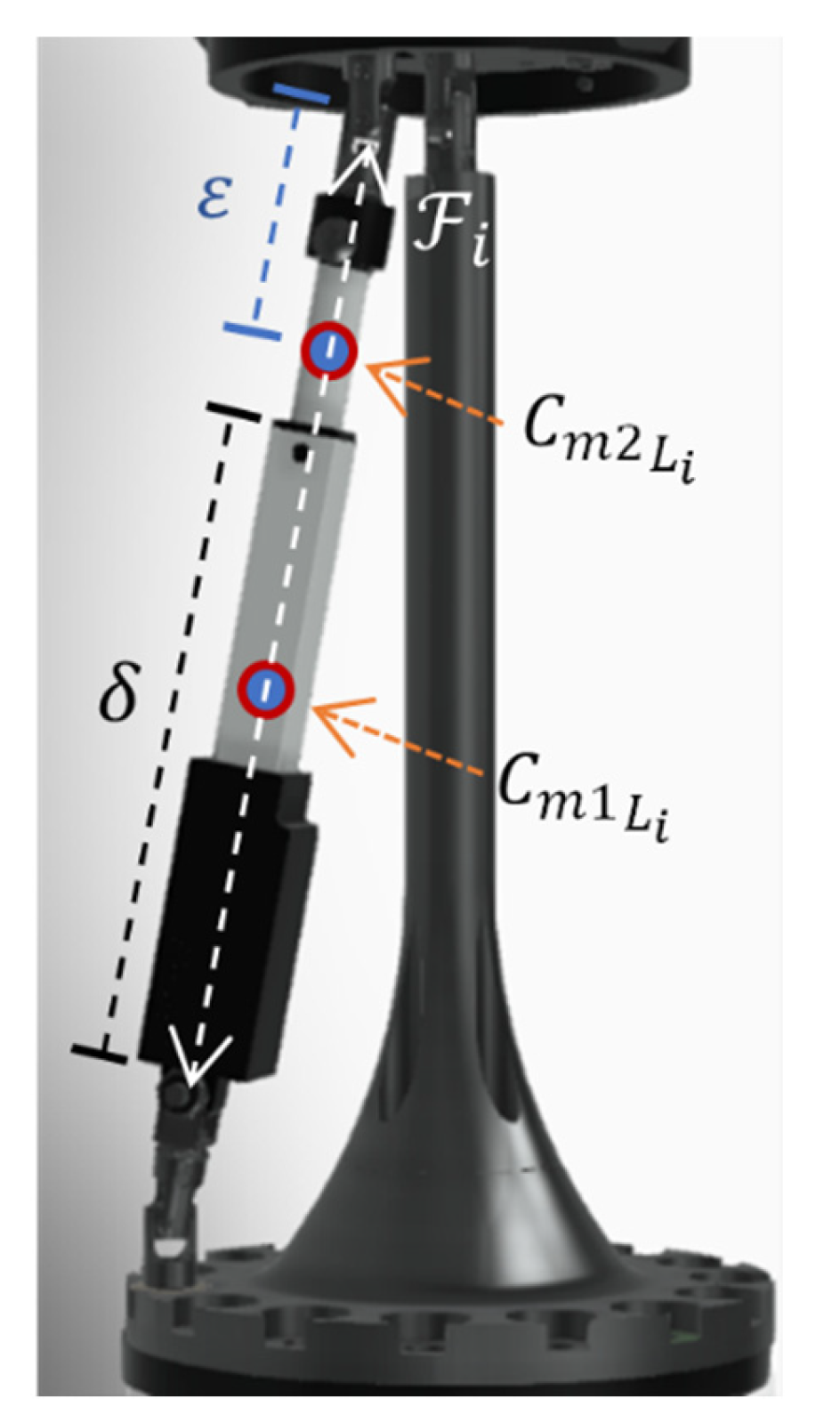
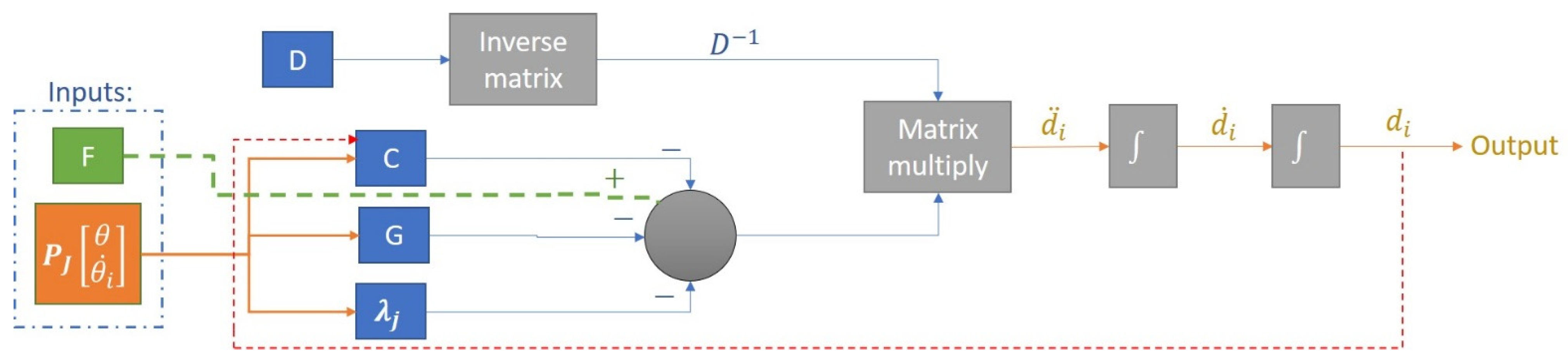
2.3. Propulsion System’s Inverse Dynamic Modeling
Derivation of Limb’s Force Equations
2.4. Path Tracking and Control
2.4.1. Feedback PD Controller
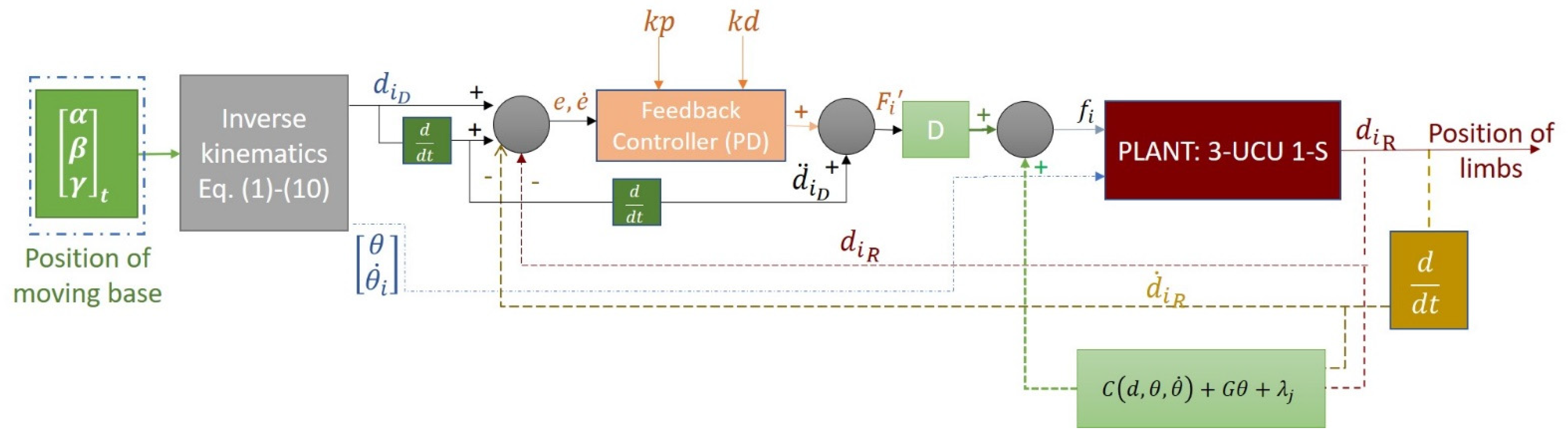
2.4.2. Feedforward Plus Feedback Controller
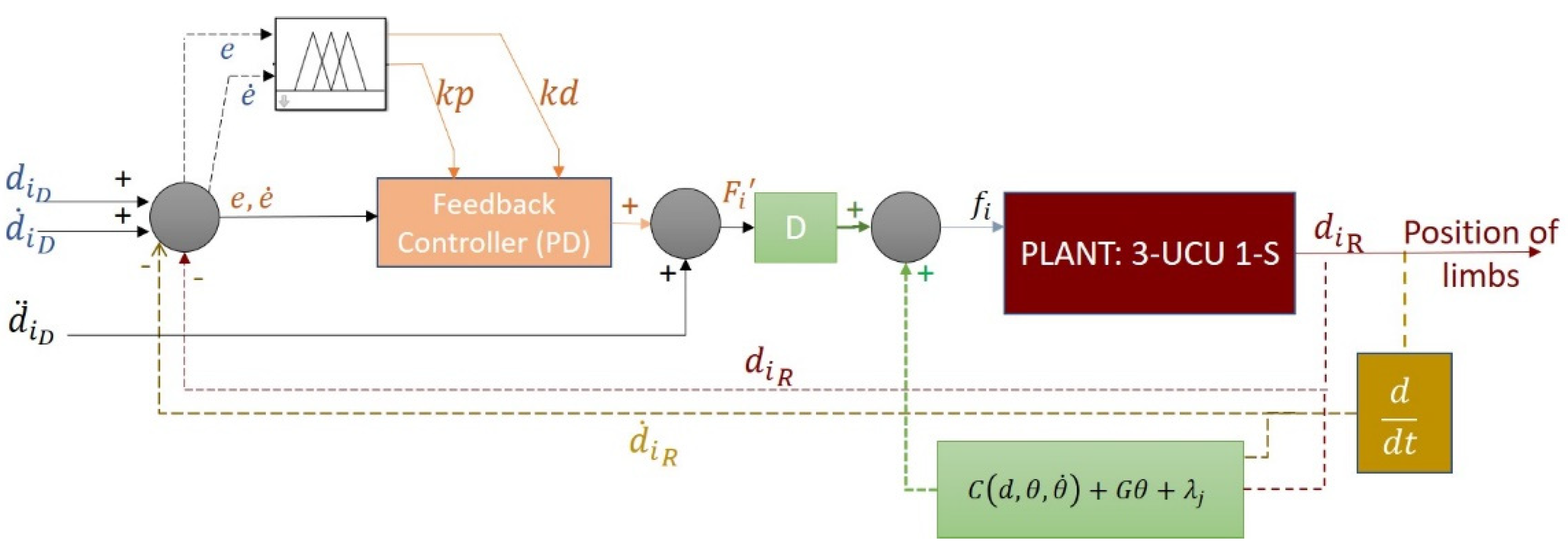
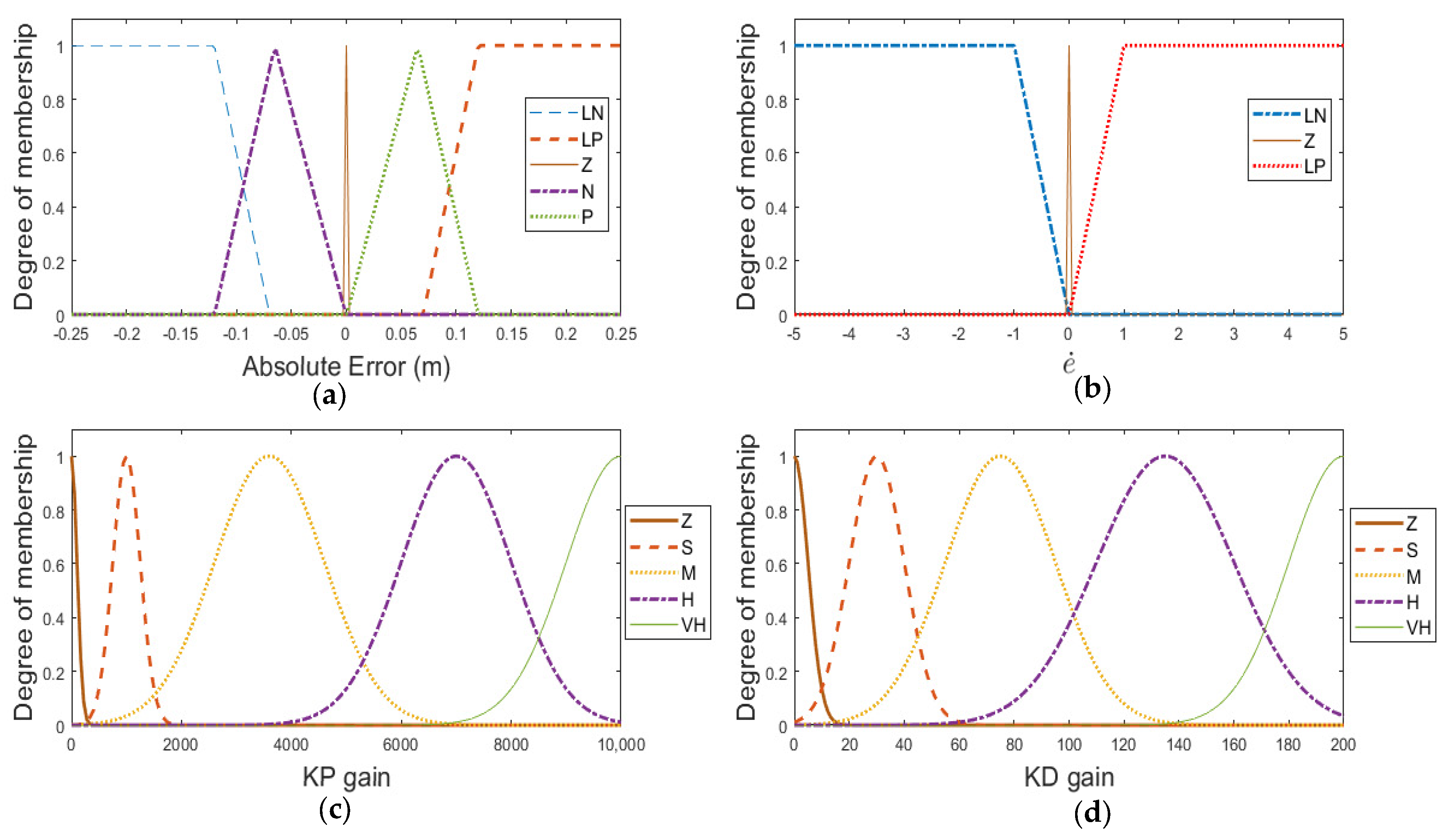
2.4.3. Adaptive Fuzzy Feedback Controller
2.5. Simulations
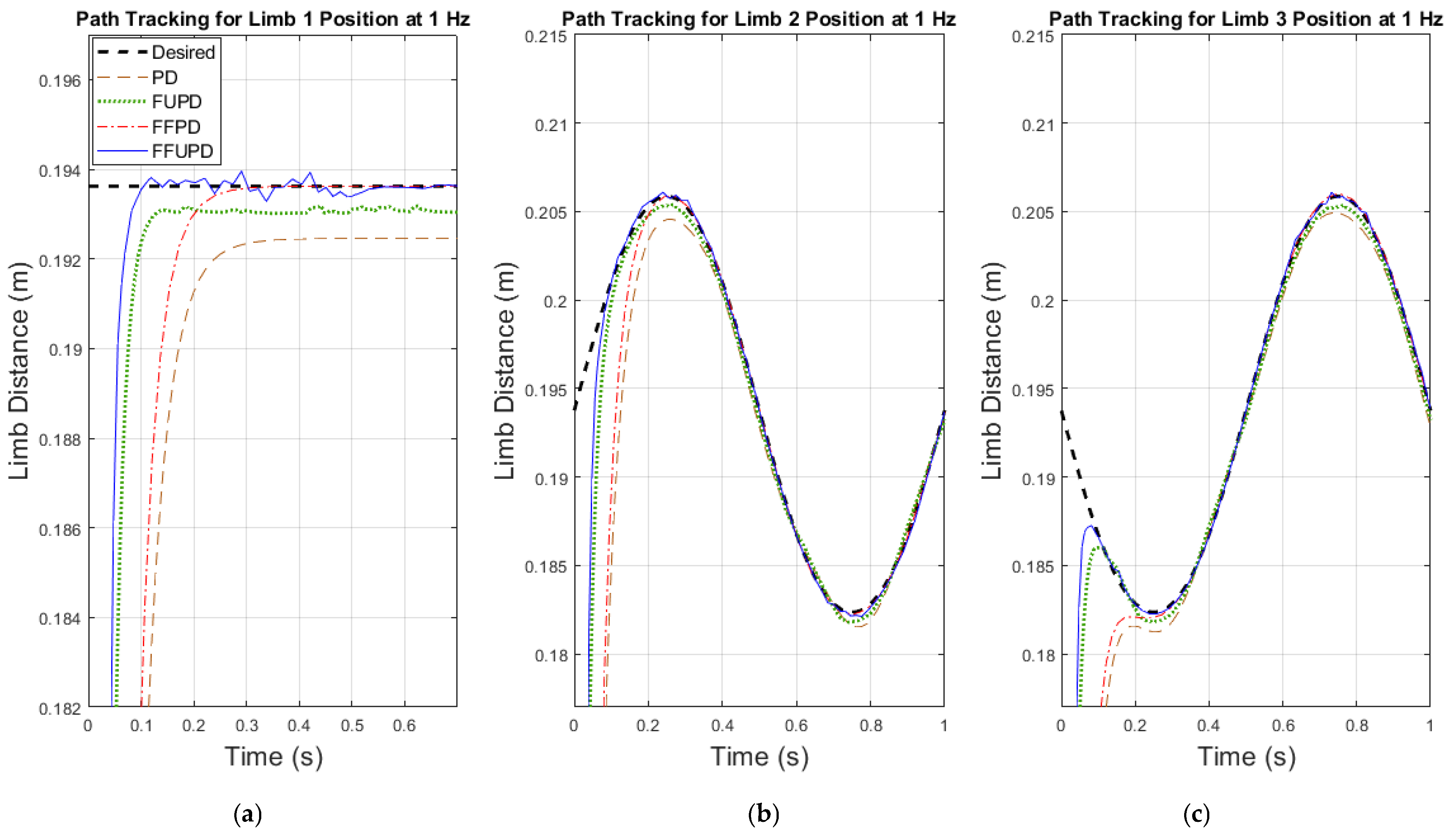
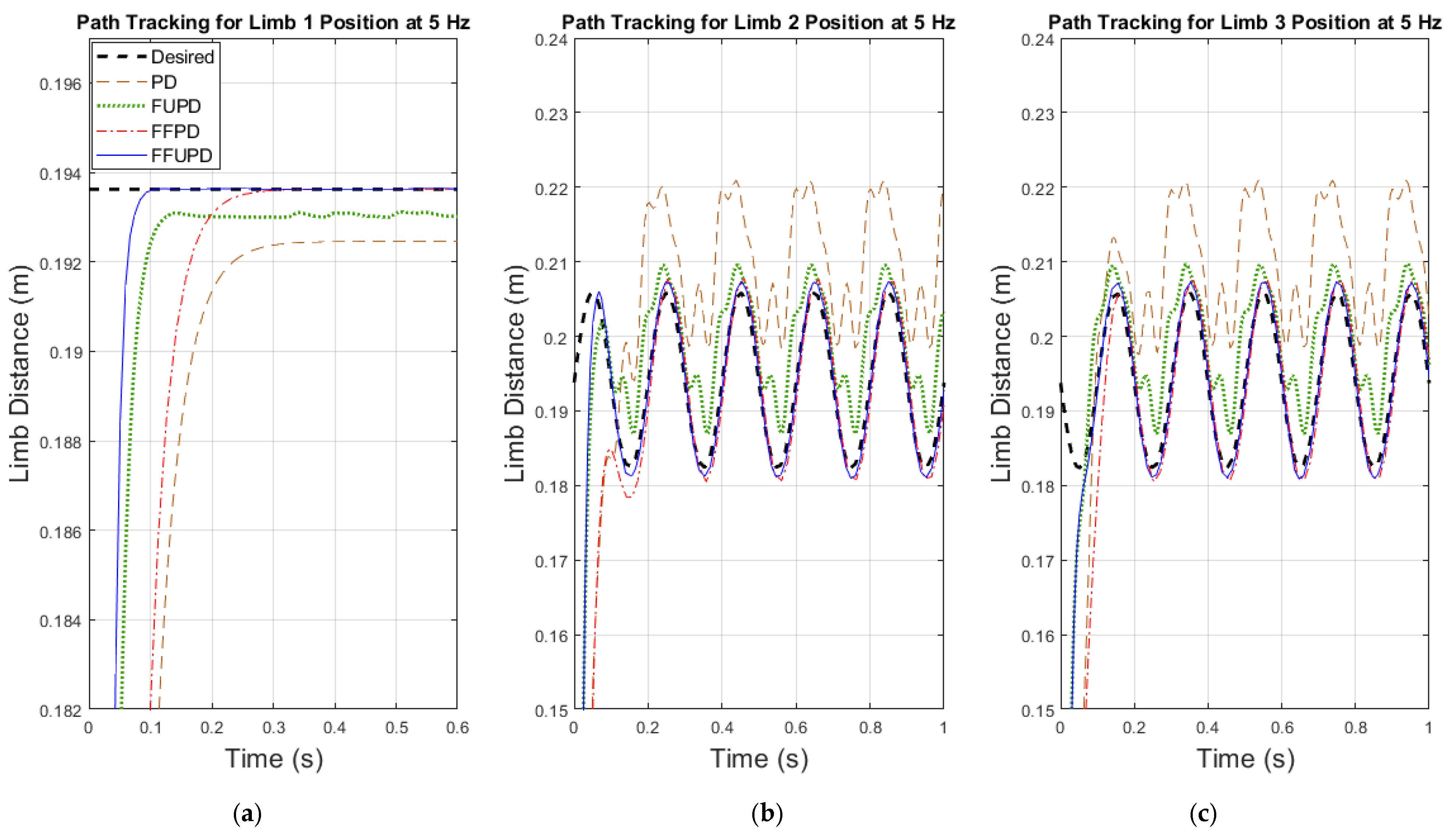
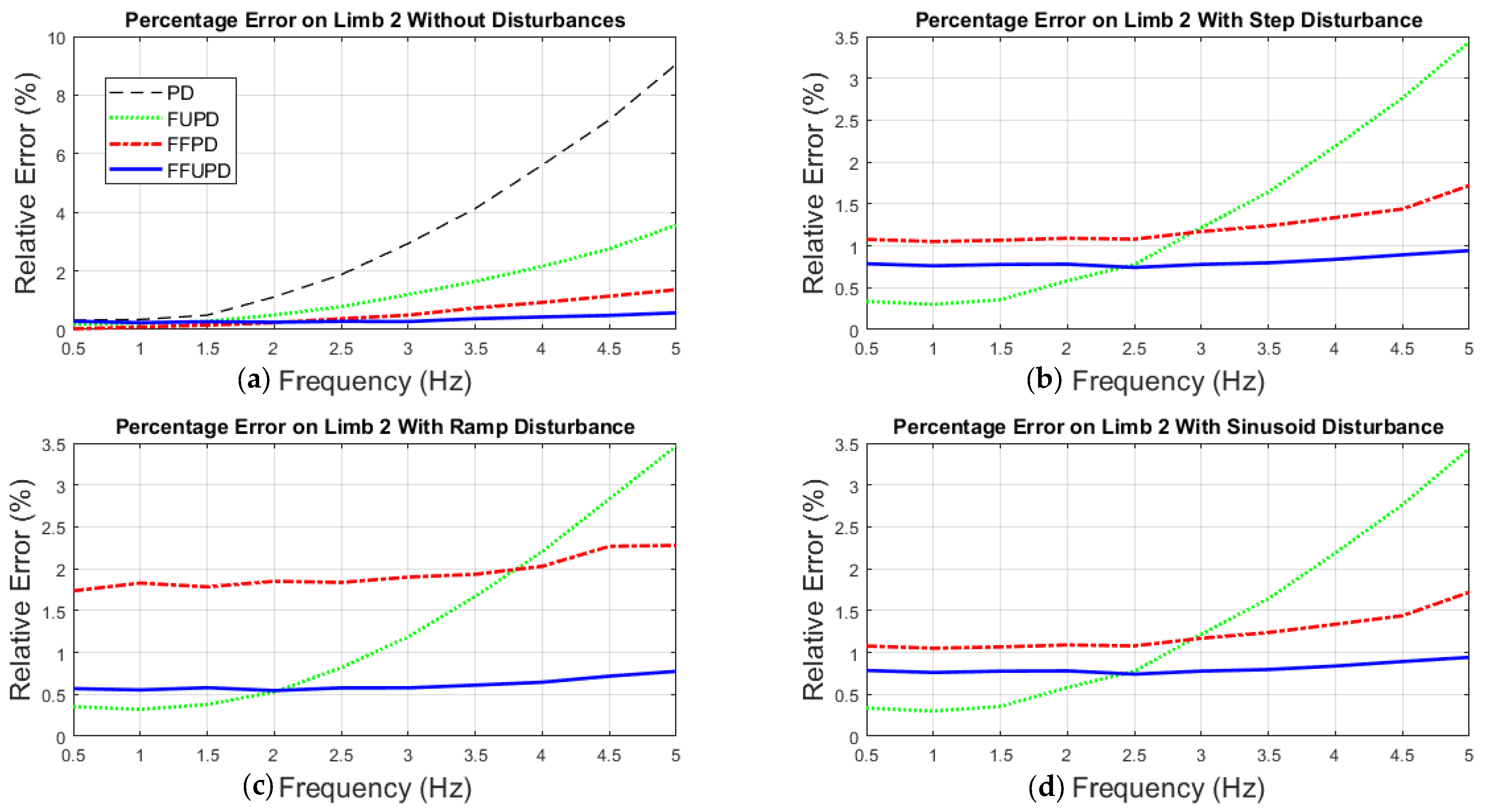
- Set 1 of simulations: The effectiveness of four controllers was tested based on the comparison of how each limb could reach the desired length when the platform changed its position over time. The precision of following the desired trajectory for each limb was compared for the whole spectrum of flapping frequencies.
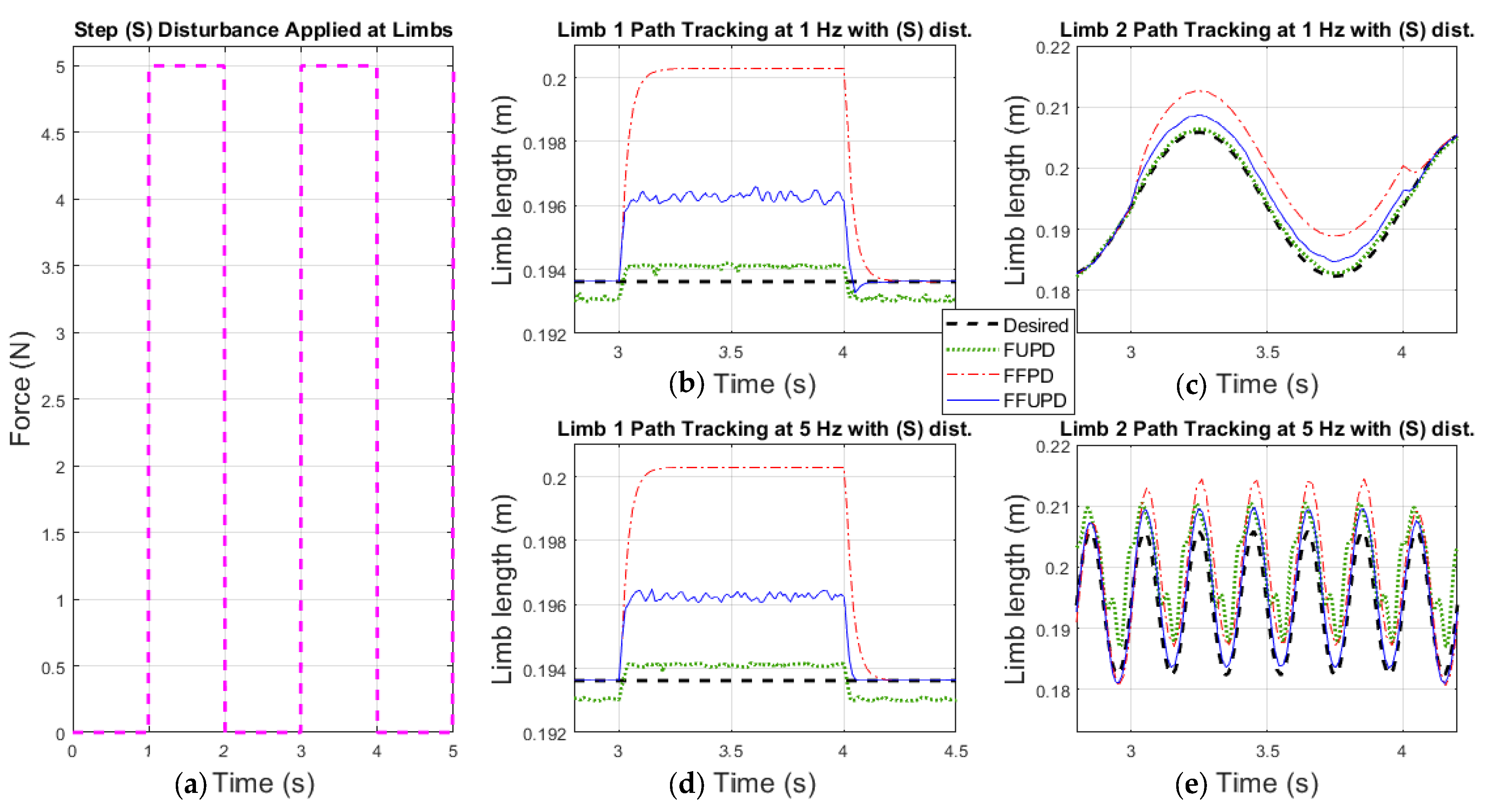
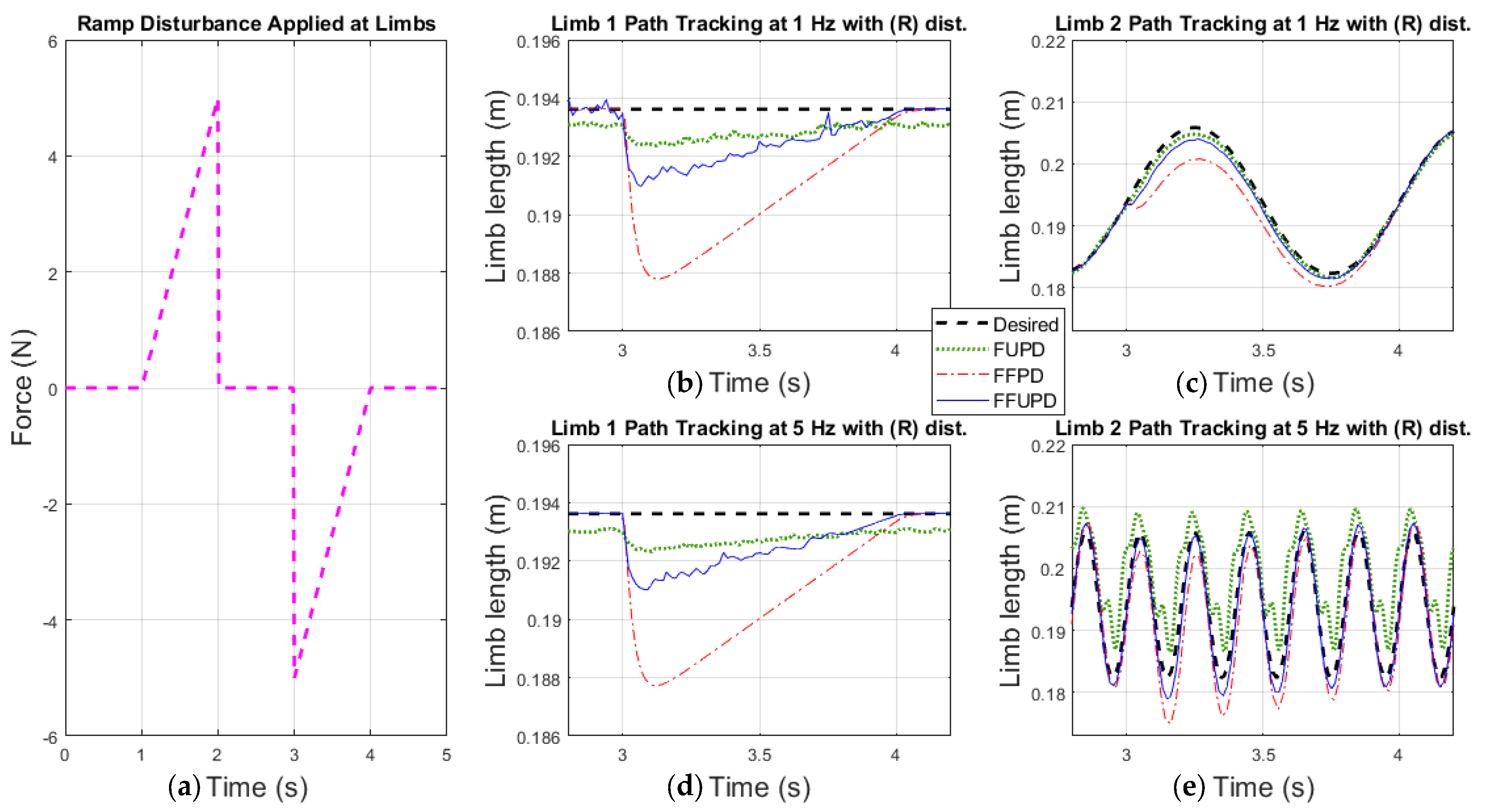
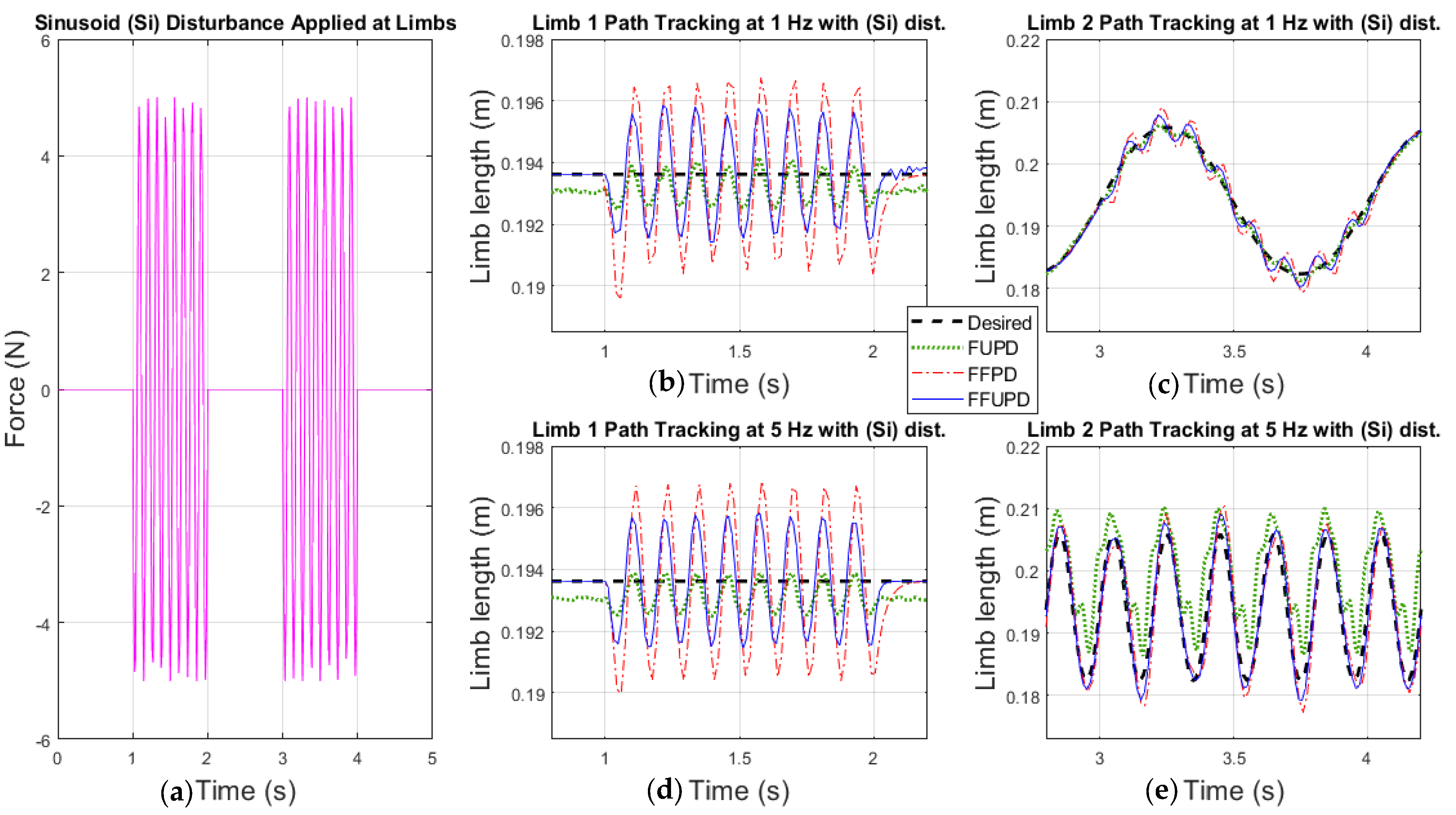
- Set 2 of simulations: The desired platform’s trajectory and flapping frequencies stayed constant as the previous set, but disturbances were added to each limb’s line of action. Three different types of disturbances were simulated and added to the plant: step (S), ramp (R) and sinusoid (Si), mathematically defined by:
3. Results and Discussion
4. Conclusions and Future Work
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sahoo, A.; Dwivedy, S.K.; Robi, P. Advancements in the field of autonomous underwater vehicle. Ocean. Eng. 2019, 181, 145–160. [Google Scholar] [CrossRef]
- Gafurov, S.A.; Klochkov, E.V. Autonomous Unmanned Underwater Vehicles Development Tendencies. Procedia Eng. 2015, 106, 141–148. [Google Scholar] [CrossRef] [Green Version]
- Chiu, F.-C.; Guo, J.; Chen, J.-G.; Lin, Y.-H. Dynamic characteristic of a biomimetic underwater vehicle. In Proceedings of the 2002 Interntional Symposium on Underwater Technology (Cat. No.02EX556), Tokyo, Japan, 19 April 2002; pp. 172–177. [Google Scholar] [CrossRef]
- Ren, Q.; Xu, J.; Guo, Z.; Ru, Y. Motion Control of a multi-joint robotic fish based on biomimetic learning. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 1566–1571. [Google Scholar] [CrossRef]
- Yu, J.; Su, Z.; Wu, Z.; Tan, M. Development of a Fast-Swimming Dolphin Robot Capable of Leaping. IEEE/ASME Trans. Mechatron. 2016, 21, 2307–2316. [Google Scholar] [CrossRef]
- Anderson, J.M.; Chhabra, N.K. Maneuvering and Stability Performance of a Robotic Tuna. Integr. Comp. Biol. 2002, 42, 118–126. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yu, J.; Tan, M.; Wang, S.; Chen, E. Development of a Biomimetic Robotic Fish and Its Control Algorithm. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2004, 34, 1798–1810. [Google Scholar] [CrossRef] [PubMed]
- Suleman, A.; Crawford, C. Studies on Hydrodynamic Propulsion of a Biomimetic Tuna. In Underwater Vehicles; IntechOpen: Vienna, Austria, 2008; pp. 459–486. [Google Scholar] [CrossRef] [Green Version]
- Yu, J.; Tan, M. Design and Control of a Multi-joint Robotic Fish. In Springer Tracts in Mechanical Engineering; Springer Robot Fish: Berlin/Heidelberg, Germany, 2015; pp. 93–117. [Google Scholar]
- Aparicio-García, C.T.; Duchi, E.A.N.; Garza-Castañón, L.E.; Vargas-Martínez, A.; Martínez-López, J.I.; Minchala-Ávila, L.I. Design, Construction, and Modeling of a BAUV with Propulsion System Based on a Parallel Mechanism for the Caudal Fin. Appl. Sci. 2020, 10, 2426. [Google Scholar] [CrossRef] [Green Version]
- Alvarado, P.V.Y.; Youcef-Toumi, K. Design of Machines With Compliant Bodies for Biomimetic Locomotion in Liquid Environments. J. Dyn. Syst. Meas. Control. 2005, 128, 3–13. [Google Scholar] [CrossRef]
- Scaradozzi, D.; Palmieri, G.; Costa, D.; Pinelli, A. BCF swimming locomotion for autonomous underwater robots: A review and a novel solution to improve control and efficiency. Ocean. Eng. 2017, 130, 437–453. [Google Scholar] [CrossRef]
- Taghirad, H.D. Parallel Robots: Mechanics and Control; CRC Press: Boca Raton, FL, USA, 2013; Volume 128. [Google Scholar]
- Merlet, J.P. Parallel Robots; Springer-Verlag: Berlin/Heidelberg, Germany, 2006; Volume 128. [Google Scholar]
- Cavallo, E.; Michelini, R.C. A Robotic Equipment for the Guidance of a Vectored Thrustor AUV. In Proceedings of the 35th International Symposium on Robotics ISR, Paris, France, 23–26 March 2004; pp. 23–26. [Google Scholar]
- Wang, R.; Guo, X.; Zhong, S. An Underwater Vector Propulsion Device Based on the RS+2PRS Parallel Mechanism and Its Attitude Control Algorithm. Appl. Sci. 2019, 9, 5210. [Google Scholar] [CrossRef] [Green Version]
- Liu, T.; Hu, Y.; Xu, H.; Zhang, Z.; Li, H. Investigation of the vectored thruster AUVs based on 3SPS-S parallel manipulator. Appl. Ocean. Res. 2019, 85, 151–161. [Google Scholar] [CrossRef]
- Pazmiño, R.S.; Cena, C.E.G.; Arocha, C.A.; Santonja, R.A. Experiences and results from designing and developing a 6 DoF underwater parallel robot. Robot. Auton. Syst. 2011, 59, 101–112. [Google Scholar] [CrossRef]
- Dasgupta, B.; Choudhury, P. A general strategy based on the Newton–Euler approach for the dynamic formulation of parallel manipulators. Mech. Mach. Theory 1999, 34, 801–824. [Google Scholar] [CrossRef]
- Bingul, Z.; Karahan, O. Dynamic Modeling and Simulation of Stewart Platform. In Serial and Parallel Robot Manipulators–Kinematics, Dynamics, Control and Optimization; Kucuk, S., Ed.; IntechOpen: London, UK, 2012; pp. 19–42. [Google Scholar] [CrossRef] [Green Version]
- Staicu, S. Dynamics of the 6-6 Stewart parallel manipulator. Robot. Comput. Manuf. 2011, 27, 212–220. [Google Scholar] [CrossRef]
- Arian, A.; Danaei, B.; Abdi, H.; Nahavandi, S. Kinematic and dynamic analysis of the Gantry-Tau, a 3-DoF translational parallel manipulator. Appl. Math. Model. 2017, 51, 217–231. [Google Scholar] [CrossRef]
- Chouchane, M.; Fakhfakh, T.; Daly, H.B.; Aifaoui, N.; Chaari, F. Design and Modeling of Mechanical Systems-II. In Proceedings of the 10th World Congress on Engineering Asset Management (WCEAM 2015), Hammamet, Tunisia, 23–25 March 2015; Volume 789, pp. 479–487. [Google Scholar]
- Elkady, A.; Elkobrosy, G.; Hanna, S.N.; Sobh, S.H.A.T. Cartesian Parallel Manipulator Modeling, Control and Simulation. In Parallel Manipulators, towards New Applications; I-Tech Education and Publishing: Vienna, Austria, 2008; p. 506. [Google Scholar]
- Wu, H.; Handroos, H. Hybrid fuzzy self-tuning PID controller for a parallel manipulator. In Proceedings of the Fifth World Congress on Intelligent Control and Automation (IEEE Cat. No.04EX788), Hangzhou, China, 15–19 June 2004; Volume 3, pp. 2545–2549. [Google Scholar]
- Fadaei, M.H.K.; Zalaghi, A.; Atigh, S.G.R.A.G.; Torkani, Z. Design of PID and Fuzzy-PID Controllers for Agile Eye Spherical Parallel Manipulator. In Proceedings of the 2019 5th Conference on Knowledge Based Engineering and Innovation (KBEI), Tehran, Iran, 28 February–1 March 2019; pp. 113–117. [Google Scholar] [CrossRef]
- Thanh, T.D.; Kotlarski, J.; Heimann, B.; Ortmaier, T. On the inverse dynamics problem of general parallel robots. In Proceedings of the 2009 IEEE International Conference on Mechatronics, Malaga, Spain, 14–17 April 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Lynch, K.M.; Park, F.C. Modern Robotics: Mechanics, Planning, and Control; Cambridge University Press: Cambridge, UK, 2017; 544p. [Google Scholar]
- Lotfi, M.; Menhaj, M.B.; Hosseini, S.A.; Shirani, A.S. A design of switching supervisory control based on fuzzy-PID controllers for VVER-1000 pressurizer system with RELAP5 and MATLAB coupling. Ann. Nucl. Energy 2020, 147, 107625. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Distance between and | |||
| Distance from to joints 1 | |||
| Distance from to joints | |||
| Angular distance between joints | (90, 210, 330) | ||
| Angular distance between joints | |||
| Roll-pitch-yaw Euler angles. | |||
| LN | N | Z | P | LP | ||
|---|---|---|---|---|---|---|
| N | VH/VH | H/H | S/M | H/H | VH/VH | |
| Z | VH/VH | M/M | Z/Z | M/M | VH/VH | |
| P | VH/VH | H/H | S/M | H/H | VH/VH | |
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Actuator’s hull length. | 0.068 | ||
| Distance from joint to | 0.025 | ||
| Mass of actuator’s hull. | 0.054 | ||
| Mass of actuator’s piston. | 0.250 | ||
| Platform’s moment of inertia. | 1.09 | ||
| Actuator’s hull inertial moment. | 3.8 | ||
| Actuator’s piston inertial moment. | 4.5 | ||
| Gravitational acceleration. | 9.81 | ||
| Proportional PD gain. | 2500 | - | |
| Derivative PD gain. | 100 | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Algarín-Pinto, J.A.; Garza-Castañón, L.E.; Vargas-Martínez, A.; Minchala-Ávila, L.I. Dynamic Modeling and Control of a Parallel Mechanism Used in the Propulsion System of a Biomimetic Underwater Vehicle. Appl. Sci. 2021, 11, 4909. https://0-doi-org.brum.beds.ac.uk/10.3390/app11114909
Algarín-Pinto JA, Garza-Castañón LE, Vargas-Martínez A, Minchala-Ávila LI. Dynamic Modeling and Control of a Parallel Mechanism Used in the Propulsion System of a Biomimetic Underwater Vehicle. Applied Sciences. 2021; 11(11):4909. https://0-doi-org.brum.beds.ac.uk/10.3390/app11114909
Chicago/Turabian StyleAlgarín-Pinto, Juan Antonio, Luis E. Garza-Castañón, Adriana Vargas-Martínez, and Luis I. Minchala-Ávila. 2021. "Dynamic Modeling and Control of a Parallel Mechanism Used in the Propulsion System of a Biomimetic Underwater Vehicle" Applied Sciences 11, no. 11: 4909. https://0-doi-org.brum.beds.ac.uk/10.3390/app11114909