1. Introduction
Conventional thermal power plants (CTPP) play a key role to deal with one of the biggest challenges of the energy sector: the reliable and efficient supply of electricity. The CTPP provides backup energy to the electric power system to balance the variable electricity demand and the intermittent generation of non-conventional renewable energy sources such as wind and solar energy. When coping with normal demand variations or when variable renewable energies cannot meet the demand, CTTP generation has to be adjusted employing lower or greater production of electricity (reduction or increase of load) respectively. This adjustment is also applied by doing start-ups and shutdowns of equipment in the power plants. In this context, rapid startups and shutdowns improve the operational flexibility of the power plant by adding to it competitive advantage [
1,
2,
3,
4]. Therefore, the optimal design of operating profiles is a research area with high potential [
5,
6,
7,
8].
A thermal power plant often uses a steam generator to take advantage of the heat obtained from its main electricity generation process. In a steam generator, water is heated and then turned into steam that spins a turbine, which is connected to a generator that produces electricity.
To create high-temperature, high-pressure steam in the steam generator, fuel energy is converted to heat, which is transferred to the drum boiler.
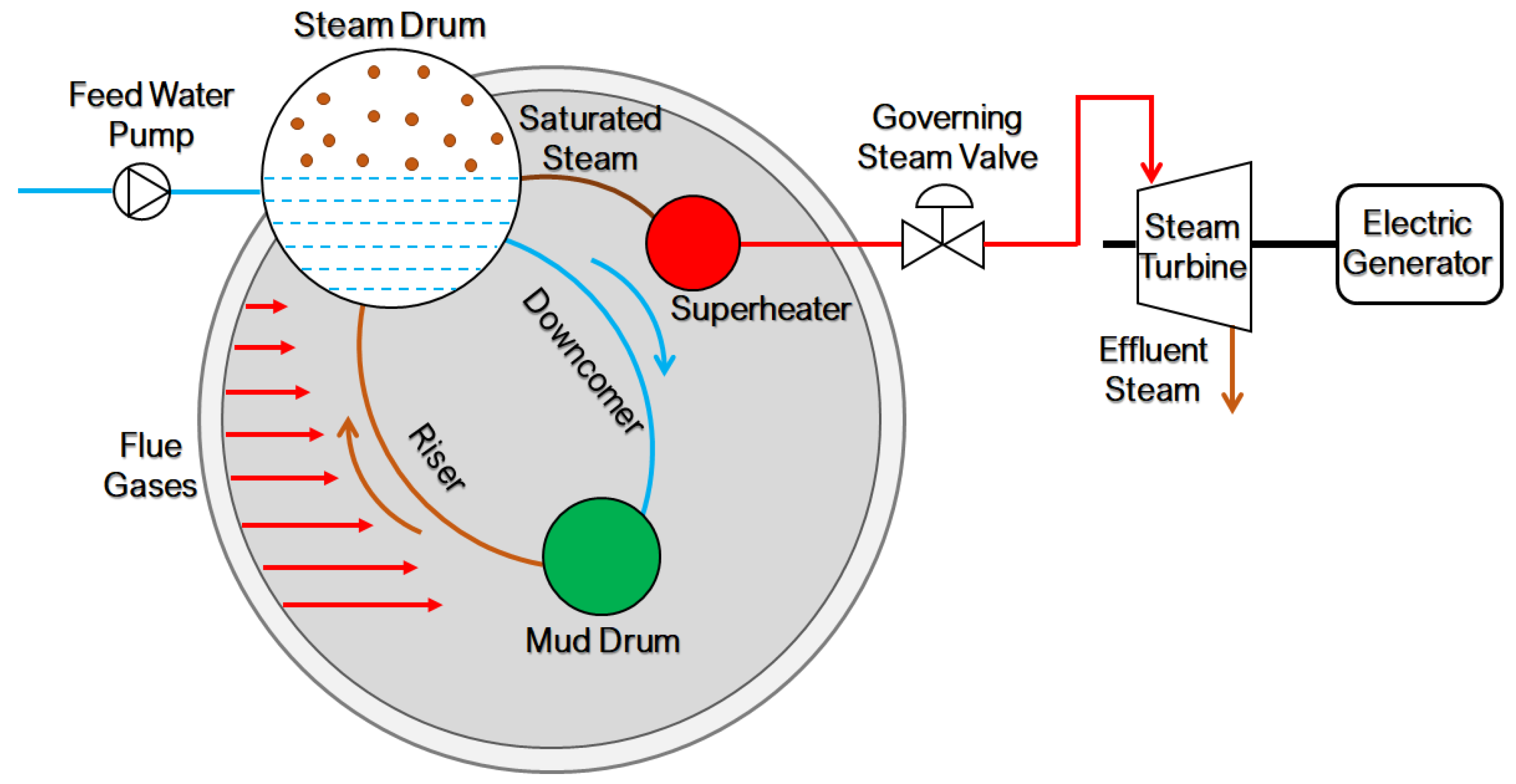
Figure 1 shows a typical drum boiler. As explained by Aström and Bell [
9] the drum boiler has a reservoir for water and steam with a water inlet and a steam outlet at the top. The drum stores the steam generated in the water tubes and acts as a phase-separator for the steam-water mixture. The difference in densities between hot and cold water along with the gravity contributes to the accumulation of the “hotter” water and saturated steam into the drum boiler.
The drum boiler has the potential to improve the competitiveness of a thermal power plant by reducing its startup time. The rate at which a boiler can be brought up to a normal operating state depends on its size, and the length of time it has been shut down. In general, the larger and colder a boiler, the longer it takes to startup.
The startup is carried out by operating the control valves in ways that the steam flow rate and pressure increase up to their normal setpoints when the steam pressure and combustion control system can be switched over to automatic.
Although fast startups improve the competitiveness in an open power market, if a startup is carried out too fast, excessive thermal stress can occur in the drum boiler components [
10]. Therefore, feasible operating procedures must consider the physical constraints of the drum boiler that ensure its integrity.
Operating procedure synthesis (OPS) can be described as a planning problem, where actions and their sequence must be found in order to take the process from an initial state to a goal state, such as in startups and shutdowns [
11]. Additionally, transient operations can take advantage of OPS in terms of both safety and cost [
12].
Despite the focus on startup-time reduction, current approaches [
9,
13,
14] fail shortly because they can only obtain startup curves of the drum boiler state variables but cannot identify the corresponding control actions (operations) and their sequence.
This paper is structured as follows:
Section 2 contains the literature review.
Section 3 the problem description. In
Section 4 the proposed approach is presented. Next, the case study is described in
Section 5. Then, in
Section 6 the experiments and results are presented. Finally,
Section 7 presents the conclusions and future work.
2. Literature Review
OPS can be considered as a search for a set of sequenced primitive operations that transform a plant system from an initial state to a pre-specified goal state through a series of intermediate states. These primitive operations must be carried out in such a way that no violations are made of any relevant process or mechanical, safety, and environmental constraints.
Most attempts to solve OPS problems have relied on simplified process behavior models [
12]. In contrast to this, simulation-based planning approaches make use of detailed dynamic behavior models of the process and a mathematical representation of quantitative constraints embedded within a rigorous dynamic optimization framework.
Regarding drum boiler transient operations, a lot of work has been done regarding the optimization of steam generation in a drum boiler from a procedural point of view. Aström and Bell [
9] developed a nonlinear physical model with a complexity that is suitable for dynamic optimization and OPS. The model is based on physical parameters for the plant and can be easily scaled to simulate any power plant drum boiler.
Franke et al. [
15] developed a nonlinear dynamic model of a drum boiler based on Aström’s physical model, using the Modelica language. Their model had three control inputs in terms of feedwater flow rate, heat supply, and steam outlet. They solved a dynamic optimization problem using a sequential quadratic programming (SQP) algorithm. Using this approach, the startup time could be reduced by 30%.
Kruger et al. [
16] proposed a quadratic programming optimization approach to determine the optimal values of steam pressure and steam temperature in a startup process. Their model considered hard constraints such as control bounds and stress levels for the drum and header. They concluded that their optimization model could minimize both fuel consumption and startup time.
Belkhir et al. [
17] investigated the minimization of the startup time of a drum boiler. Their proposed startup strategy defined the initial and goal states in terms of steam mass flow rate and the internal pressure of the drum. The startup process was formulated as an optimal control problem that minimized a quadratic objective function under physical and operational constraints. The physical constraints were related to the structural integrity of thick-walled components due to higher thermal stresses. The optimization problem was solved by combining a framework developed on the JModelica environment and the interior-point optimizer algorithm (IPOPT). Their results were compared with the optimal start-up trajectories in Franke et al. [
18], and the optimized profiles reached desired states in a shorter time without violating the operational and physical constraints.
Zhang et al. [
19] reported the dynamic analysis of the steam and water system of the natural circulation boiler using the environment of MATLAB/Simulink. They proposed a boiler model based on the work of Aström and Bell with specific parameters to simulate the dynamic analysis of the steam water system. They solved the model using the ode45 algorithm, which is based on the fourth-order Runge–Kutta and Dormand–Prince methods. The boiler startup aimed at saving water and fuel.
Nevertheless, these works have limited applicability since they were solutions to specific problems. For instance, in many cases, the simulation model is embedded within the optimization tool and it is not possible to scale them for more complex problems. Other works propose approaches using commercial tools for the coupling of a simulation-optimization system. The drawback is that these tools operate as black boxes, with limited information about the modeling assumptions. A third group of contributions, despite considering thermal stress evaluation, seek to minimize startup times regardless of how the plant must be operated to achieve a given goal state.
To overcome the limitations of previous works, this paper proposes a scalable approach for the synthesis of operating procedures that minimize the startup time of the drum boiler while avoiding the excessive formation of thermal stresses. The proposed approach is based on a dynamic optimization methodology with a hybrid-metaheuristic algorithm that generates the optimal startup procedure of a drum boiler. The proposed algorithm is based on two important elements of two metaheuristic algorithms. Namely, the search zone in the cooling element from the simulated annealing algorithm and the efficient computational performance provided from the tabu search algorithm memory structures. A case study evaluates the proposed approach by comparing it against results previously published in the literature.
5. Case Study
The evaluation of the proposed methodology is carried out by means of a case study on the generation of the optimum operating procedure of a drum boiler. The problem consists of finding an operating procedure that takes the system from a given pressure and steam-flowrate values to the desired pressure and steam mass-flowrate values in the shortest time possible while avoiding excessive thermal stresses in the metal of the wall of the drum boiler. The simulator component was developed using the OpenModelica environment [
25,
26]. OpenModelica has algorithms for solving differential equation systems, making it possible to observe changes in variables over time. The drum boiler simulation model in OpenModelica is based on the model reported by Rosado et al. [
10].
The integration between the OpenModelica simulator and the optimization algorithm was carried out by implementing a two-way interface. First, the interface receives the operating procedure generated by the optimization algorithm. Then, it translates this procedure to a set of parameters for the simulation model. Finally, it evaluates and executes the simulation model. Conversely, the interface receives the results of the simulation and translates them into a format suited to the optimization algorithm.
The optimization problem is formulated based on the work by Belkhir et al. [
17]. The goal is to reach given values of pressure and steam outlet flowrate by manipulating the heat inlet valve and the steam outlet valve. Accordingly, the optimization problem is formulated as:
where
Equation (5) seeks to minimize the time it takes for the drum boiler to reach the goal. The parameters
and
from Equation (5) are the ones specified by Belkhir et al. [
17]. When
A = 0 the problem is reduced to finding a sequence of operations that is feasible but not necessarily optimal [
9]. A feasible solution is a solution that reaches the goal state without violating any of the constraints. In this optimization problem
is the desired internal pressure,
is the desired steam mass-flow rate,
and
are weights,
is the steam pressure at the drum boiler, and
is the steam flow rate at the drum boiler outlet. Equation (6) represents the time that the system takes to get from the initial state to the final state.
Equation (7) constrains the opening of the steam outlet valve (
) to values between 0 (totally closed) and 1 (fully open). Equation (8) ensures that the heat rate does not exceed 25 MW/min. It is a nonlinear constraint because it implies that there could be different heat ramp rates during the process. Equation (9) is a constraint of the accumulated heat limit of the drum boiler which must not exceed 500 MW and Equation (10) is a constraint that avoids excessive thermal stress in the drum boiler that must be less than 10 MPa. The water is supplied by a control system and the steam flow is controlled by a valve. The interaction between the opening of the steam outlet valve and the heat rate in the drum boiler generates steam at pressure
which exits at flow rate
. The steam can later be sent to a superheater or directly to a steam turbine [
9]. For this problem, the goal was set to
MPa,
kg/s. The weights were set to
and
. Parameter
A is set to 0 during the initial solution generation and then changed to
for the rest of the algorithm. The nonlinearity of Equations (7) and (8) add complexity to the problem, which justifies the use of metaheuristic methods to find a solution.
To ensure that the optimization algorithm converges, the stopping condition of the algorithm is met when 1000 iterations are performed. It is worth mentioning that several tests with more iteration limits were performed, but the algorithm always converged before 1000 iterations.
Each operating procedure is represented according to the encoding scheme explained in
Section 4.2.1, in which each operation is formed by combining discrete values of the heat flow and the valve position of the steam outlet valve. This results in the nine operations shown in
Table 1.
The execution time per operation is set to 60, 120, or 180 s. The repetition parameter is set to vary between 0 to 9. The length of the sequence is fixed to nine elements.
Figure 7 shows an example of an operating procedure. The first element in the sequence represents operation 8 (
MW/min,
) being executed for 60 s and repeated three times.
The feasibility function
is calculated with Equation (11). An extra penalty can be applied to
in case the total time of the generated sequence is less than 1200 s, a value too low to be feasible.
where
Q is the accumulated heat that must reach 400 MW,
represents the number of times the thermal stress exceeded the 10 MPa limit throughout the process and
G represents how far is the sequence of approaching the steam pressure and steam outflow goal.
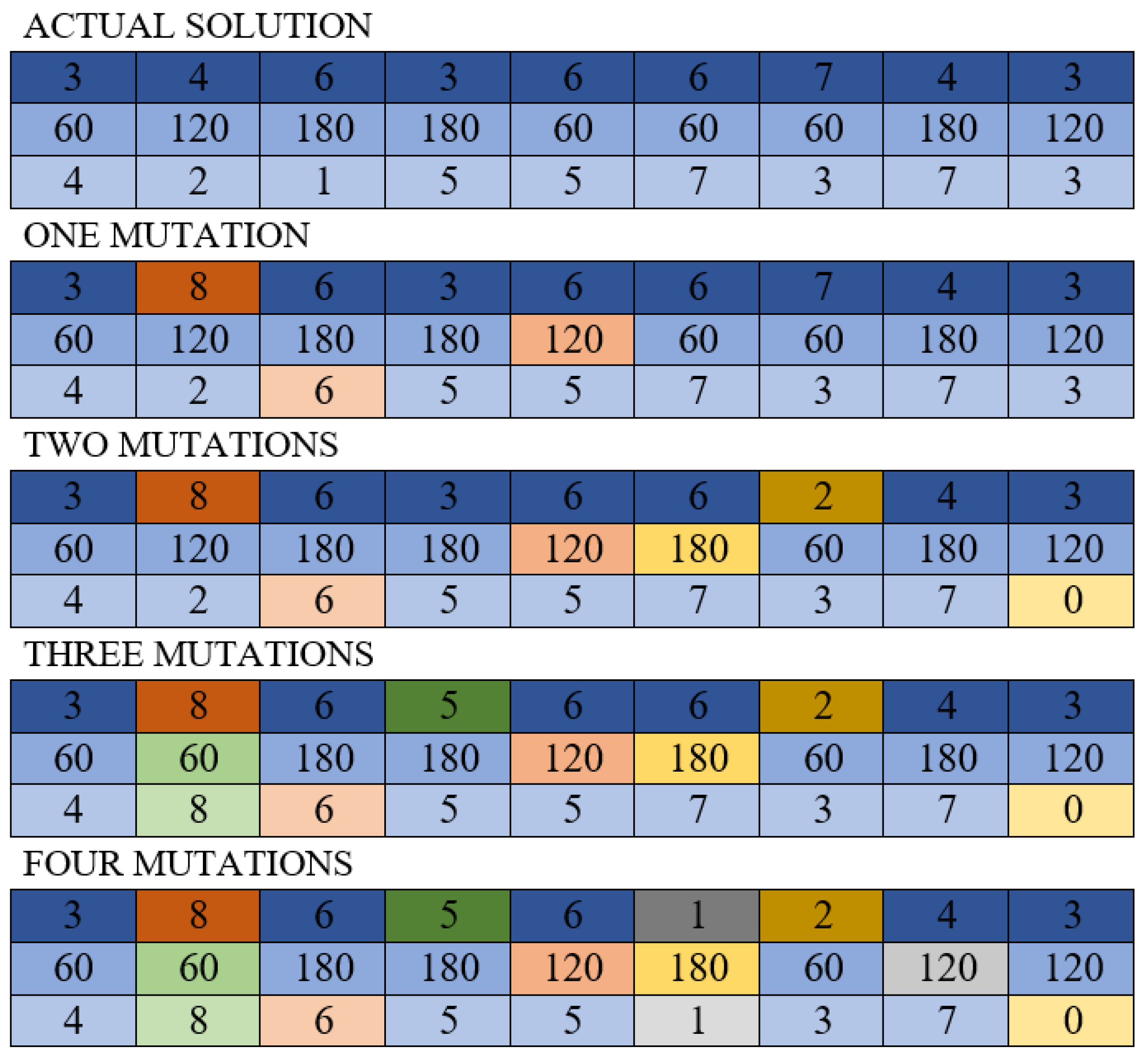
During the optimization process, new solutions are generated using the NOP. The NOP takes an existing solution and makes a mutation by randomly change one of the sequence elements (operation, time, and repetition). A neighborhood operator can be applied multiple times as a solution-diversification strategy.
Figure 8 shows an example of NOP applied four times.
The number of times that NOP is applied is set based on the value of
as shown in
Table 2. The number of times NOP is applied depends on the length of the solution for the given problem. In this case study, the maximum number of mutations is four because it changes half the values of the previous solution in the worst scenario for
.
For the metaheuristic hybrid algorithm and the simulated annealing algorithm, it is necessary to specify the acceptance probability function. This function is represented by Equation (12):
where
P is the probability of selecting a worse neighbor solution,
T is a parameter that gradually decreases as the algorithm proceeds (
T is also known as the annealing temperature),
is the final time of the neighbor solution and
the final time of the actual solution because the time is the value that is sought to optimize in this problem.
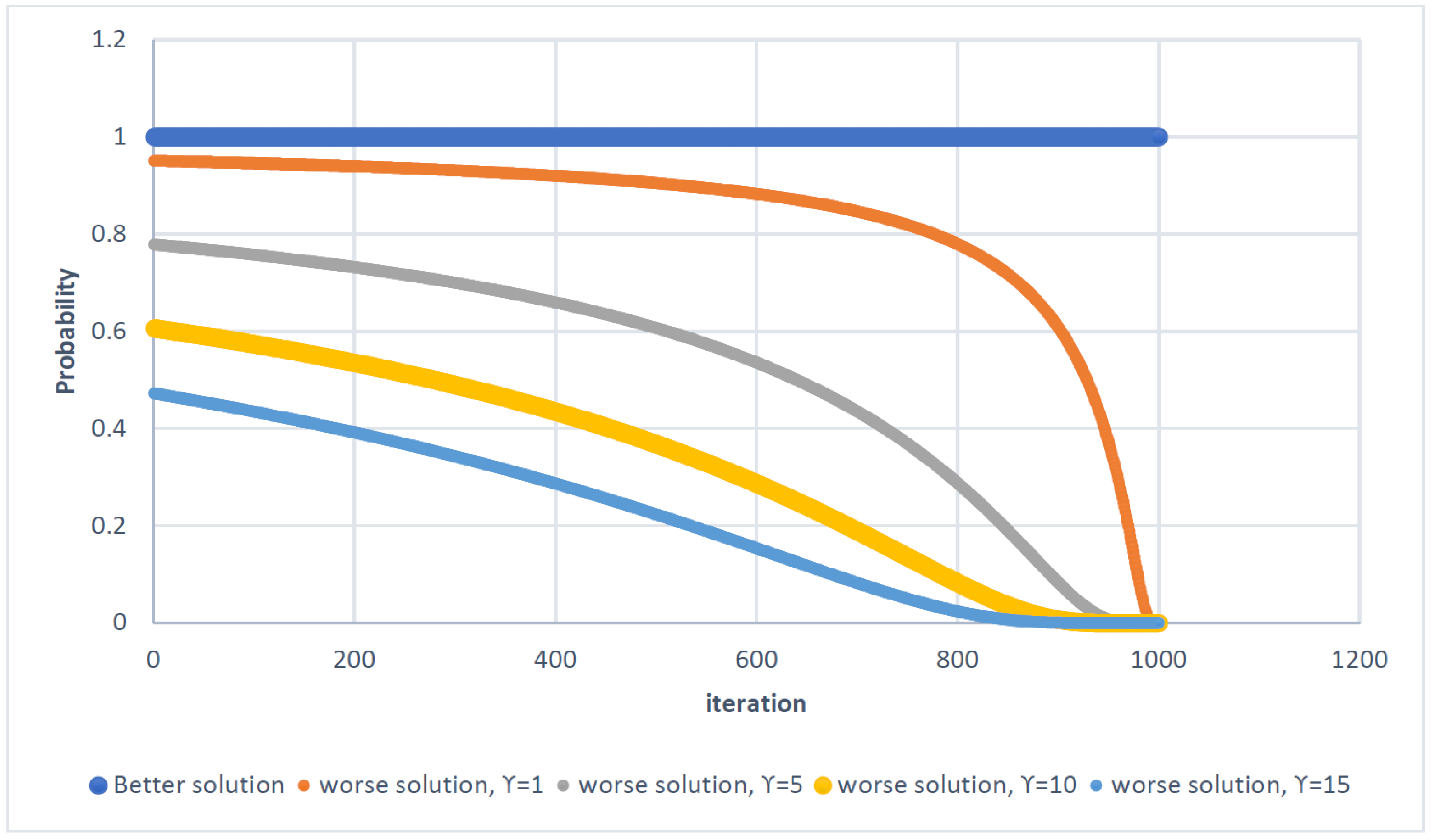
is a parameter that magnifies the difference between two solutions.
To select the value of
, the value of the Boltzman distribution was analyzed with a difference of 50 s between two solutions, varying the value of
between 1 and 15. The value of
was selected as it starts with a probability slightly larger than
but steadily decreasing through the iterations.
Figure 9 shows the probability of selecting a worse solution (50 s worse) using different
values in a run of 1000 iterations.
6. Experiments and Results
To evaluate the proposed approach, two experiments were carried out:
Experiment A, which uses a randomly generated operating procedure as the initial solution for the metaheuristic hybrid algorithm. The results were then compared against a benchmark solution [
17] and a solution obtained with the micro genetic algorithm described in [
10].
Experiment B, which compares the metaheuristic hybrid algorithm, the simulated annealing algorithm, and the tabu search algorithm. The comparison considers two different initial solutions: a randomly generated solution; and a feasible solution generated by the procedure explained in
Figure 6.
6.1. Experiment A
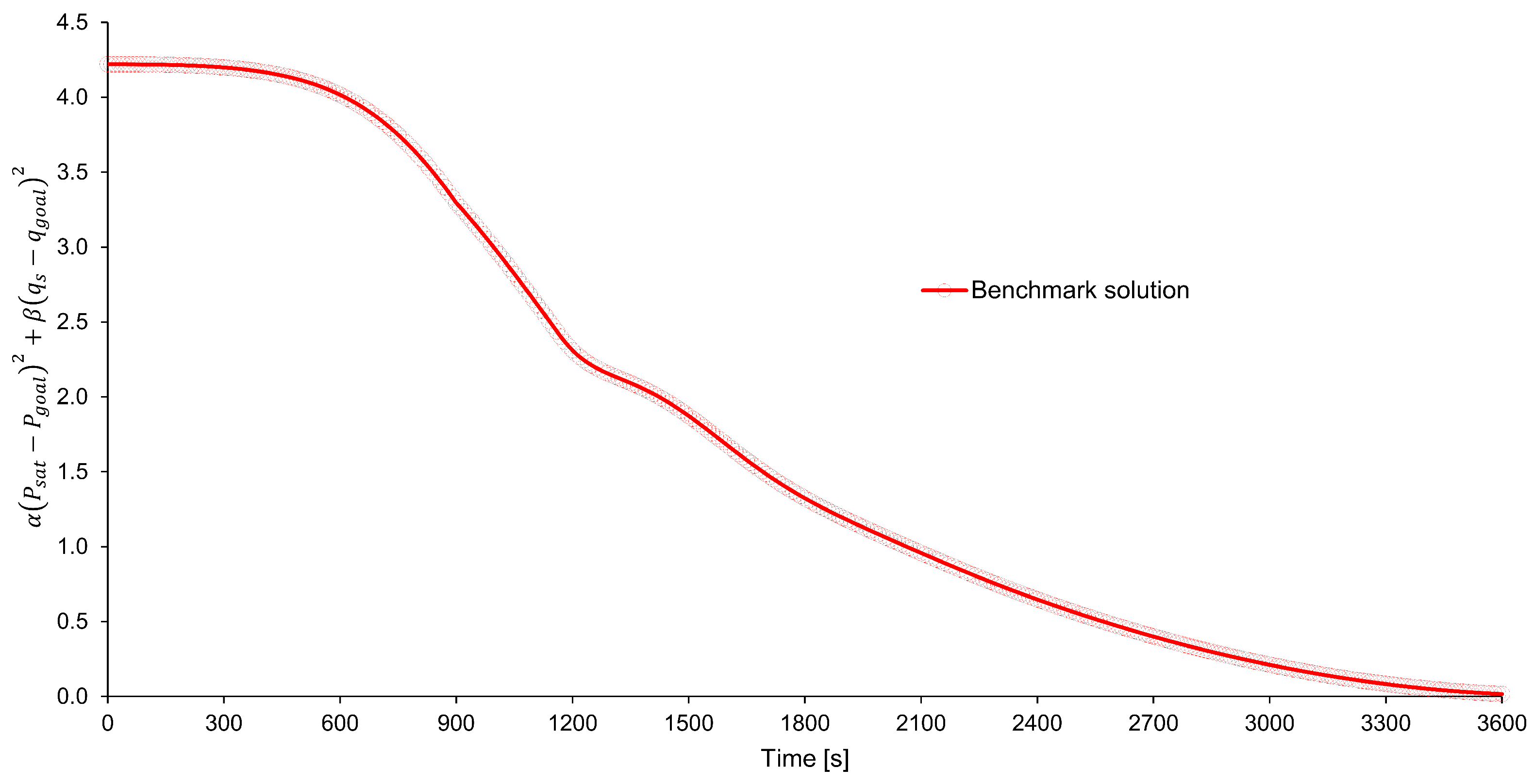
The benchmark solution is a representative startup profile reported by Belkhir et al. [
17]. In this solution, the operating procedure consists of keeping the heat input at a constant value of 8 MW/min and the steam output valve fully open since the very beginning. After executing the operating procedure with the OpenModelica simulation model, the startup completed in 3000 s.
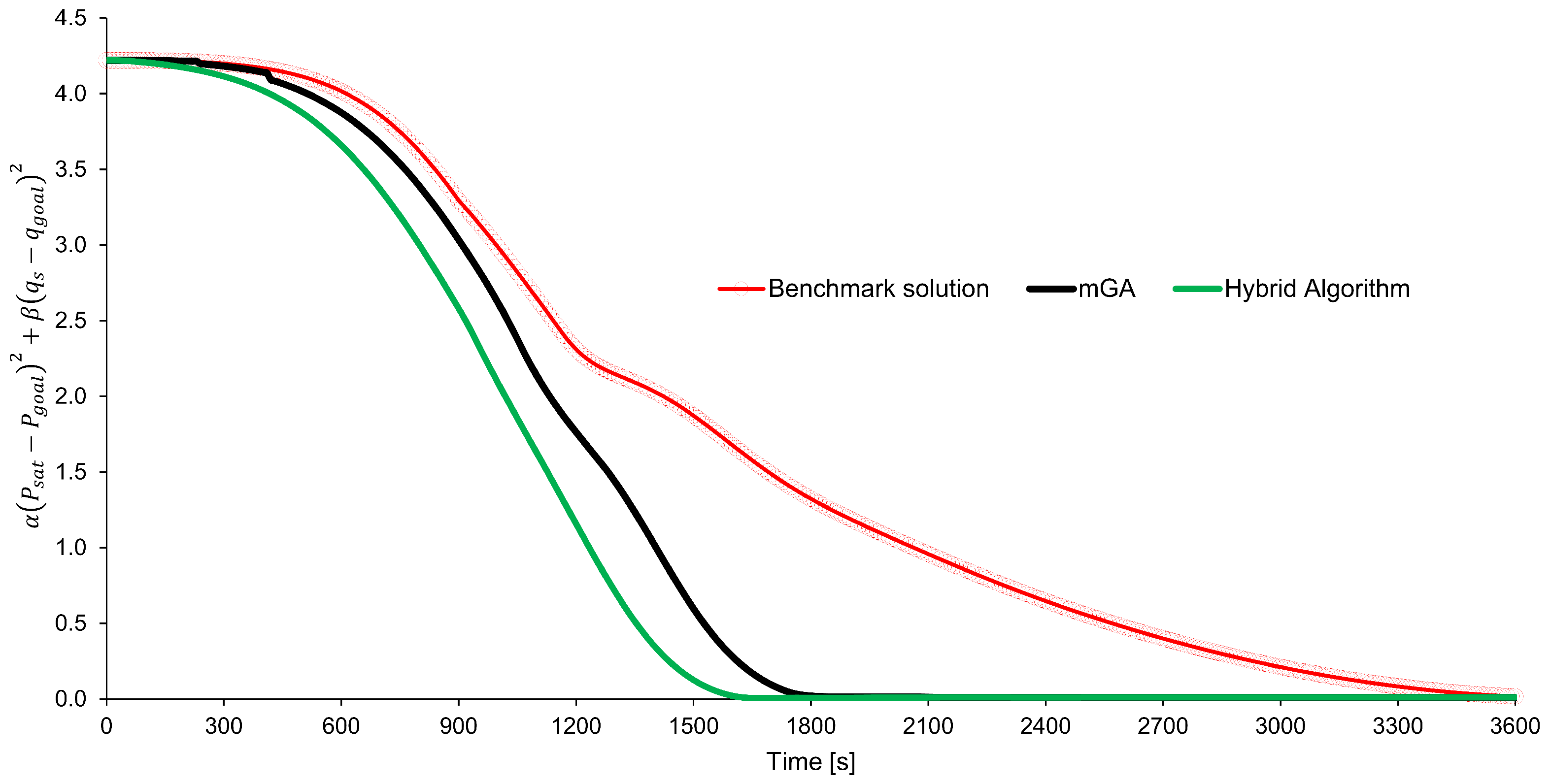
Figure 10 shows the plot of function
which measures the distance to the goal state over time.
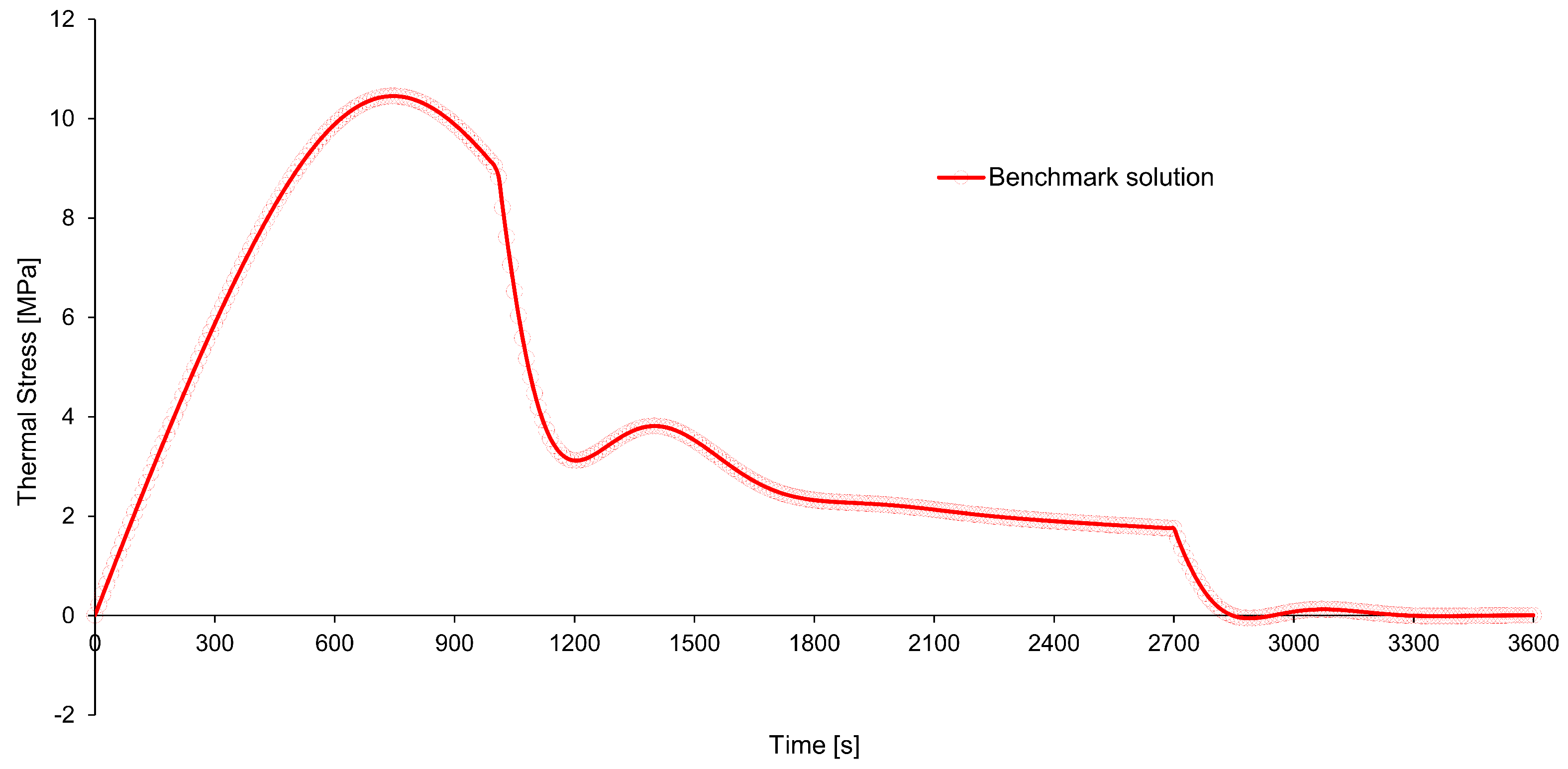
The Belkhir operating procedure was a feasible solution as it never exceeded the limits imposed by the thermal stress constraint, maintaining a stress value between −10 MPa and 10 MPa. The goal state was reached after 3000 s. The stress profile is shown in
Figure 11.
The micro genetic algorithm (mGA) implemented the same encoding scheme of this paper. The probabilities used in all the experiments were 10% for mutation and 20% for crossover. The population of the mGA consisted of 5 individuals, and the termination criteria were set to a maximum of 40 generations and 20 epochs, respectively.
The metaheuristic hybrid algorithm was initiated with a randomly generated solution and stopped after 1000 iterations.
Table 3 shows the solution obtained as a result of the optimization.
Table 4 shows the decoded operating procedure based on the operations shown in
Table 1. After reaching the desired goal, the heat inlet valve and the steam outlet valve took the values of 0 MW/min and full open respectively.
With this operation procedure, the drum boiler arrived at the goal state in 1560 s.
Figure 12 shows the change of the distance to the goal state over time over time for the metaheuristic hybrid algorithm, the benchmark solution, and the micro genetic algorithm.
The operating procedure obtained with the metaheuristic hybrid algorithm produced a feasible thermal stress profile of the thick-walled component. This thermal stress profile had a similar shape pattern and magnitude as the one obtained with either the benchmark solution or the solution obtained with the micro genetic algorithm, which means that the drum boiler integrity was not affected.
Figure 13 shows the behavior of the thermal stress, which is related to the structural integrity of the drum boiler.
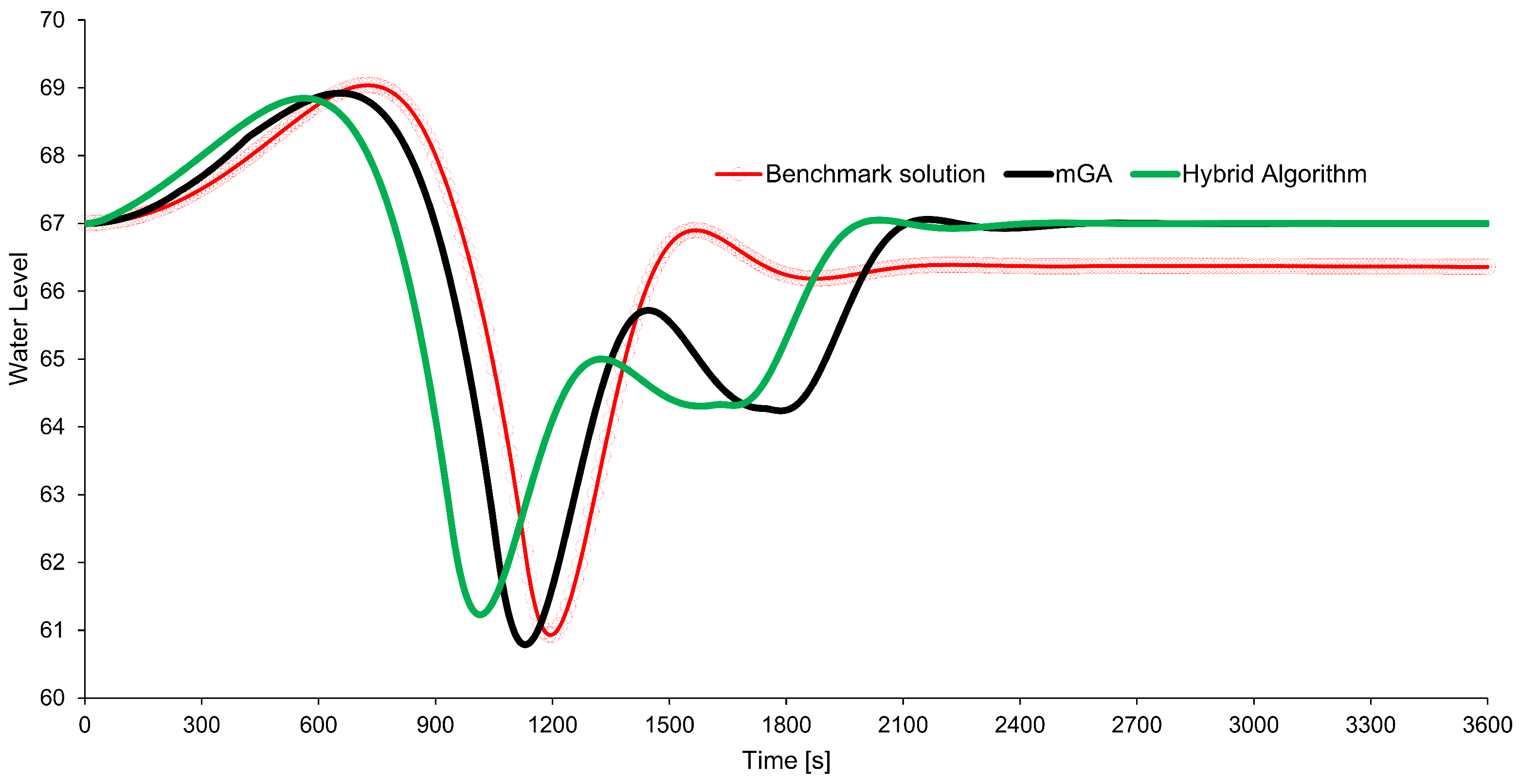
The feed water flow had to be controlled so that the water level inside the drum was kept at its set point. A PI controller was used for this purpose.
Figure 14 shows the behavior of the water level during the entire drum boiler startup process, where the metaheuristic hybrid algorithm achieved a more stable pattern compared to the micro genetic algorithm and the benchmark solution.
Figure 14 shows that the water level changed abruptly during the drum boiler startup process. The instability of the liquid level could be reduced with the use of a non-linear controller that can adapt to the non-linearity of the model or the use of the gain scheduling approach which involved the application of different controller tuning parameters as a process transitions from one operating range to another [
27]. However, the magnitude of the changes in water level was considered tolerable for this experiment.
The best result was obtained at the 654th iteration. Due to the memory strategy, the simulation of 396 previously simulated solutions was avoided. The experiment took 216 min on a computer with 4.00 GHz Intel Xeon W-2125 CPU and 32 GB of RAM, running Windows 10 Pro. In summary, the proposed approach could synthesize a startup operating procedure that reached the goal state in less time than the benchmark solution, without sacrificing feasibility.
6.2. Experiment B
Experiment B compares the proposed metaheuristic hybrid algorithm against two well-known metaheuristic algorithms: simulated annealing and tabu search.
To prove if the difference in the startup time of each algorithm is significant, a hypothesis test was conducted. To do this test, experiments were carried out for a randomly generated initial solution and a feasible solution that was generated according to the procedure shown in
Figure 6. A total of 10 experiments were performed for each algorithm as shown in
Table 5. In either algorithm, each experiment was run with 1000 iterations as stopping condition, which was shown to guarantee convergence in all cases.
The test aimed at proving whether there was a significant difference in the average startup time obtained by each of the algorithms. To prove that, we used the t-test and the mean start up time of 10 experiments. The start-up time means were considered significantly different when . Conversely, start-up times means were not considered significantly different if . In all the experiments, the result was , indicating that in all the experiments the start-up times means were considered significantly different.
For the time to complete the start-up, the following hypothesis test was carried out, which sought to verify or refute if there was a significant difference between the solution generated by the metaheuristic hybrid algorithm and the tabu search algorithm; and between the metaheuristic hybrid algorithm and the simulated annealing algorithm:
where
is the average of the startup time obtained with the metaheuristic hybrid algorithm and
is the average of the startup time obtained with either simulated annealing or tabu search.
Table 6 and
Table 7 show the mean and standard deviation of the 10 experiments for each method.
Table 8 shows the results obtained with the application of the
t-test in experiment B.
In
Table 6 and
Table 7, the “best” result was the best start-up time measured in seconds and the “CPU” result was the required time for the CPU to achieve it measured in minutes.
For the case of minimum drum boiler startup time, the t-test shows that there was no significant difference in the result obtained with the metaheuristic hybrid algorithm compared to the result obtained with the tabu search algorithm and simulated annealing. However, this test shows that there was a significant difference compared to the micro genetic algorithm.
In the case of computational time, as shown in the box plots of
Figure 15, the results indicate that the computational time of the metaheuristic hybrid algorithm was better than the computational time of either the tabu search algorithm, simulated annealing, and micro genetic algorithm. As shown in
Figure 16 the computational time of the metaheuristic hybrid algorithm was better than the computational time of both simulated annealing and tabu search algorithm, but it was not better than the computational time of the micro genetic algorithm. However, in any case, the solutions proposed by the micro genetic algorithm were better than the proposed by the metaheuristic hybrid algorithm in terms of the start-up time.
7. Conclusions and Future Work
This paper presents an approach for the synthesis of the operating procedures of a plant system. Specifically, a metaheuristic optimization algorithm was developed that combines two characteristics of other metaheuristic algorithms, namely the cooling element from the simulated annealing algorithm and the memory structure of the tabu search algorithm.
From the results of the experiments, it can be concluded that the proposed methodology can synthesize an operating procedure for the startup of a drum boiler of a thermal power plant that takes less time to reach its goal state than a representative startup profile found in the literature.
From the results of the experiments, it is evident that the metaheuristic hybrid algorithm performs better than the individual algorithms in terms of computational time. However, results from the t-test indicate that there is no significant difference in the drum boiler startup time result using the metaheuristic hybrid algorithm against the simulated annealing or tabu search algorithms. Despite the advantage in computational time, this result of the metaheuristic hybrid algorithm can still be improved by modifying the exploration strategy of the hybrid algorithm.
Additionally, the results reveal that the metaheuristic hybrid algorithm can find a better solution than the one found with the micro genetic algorithm. The hybrid algorithm tends to find better solutions by cooling element and the tabu list. The “cooling” element allows the selection of new “worse” solutions at the early stages of the iterative process in order to avoid local optima. Then the algorithm “cools” as it converges, so the probability of selecting “worse” solutions decreases, accepting only better solutions. On the other hand, the tabu list is a memory structure that stores information of previously evaluated solutions. As a result, the algorithm avoids visiting again solutions that have already been evaluated, improving the computational efficiency by avoiding unnecessary simulation runs.
As future work, different optimization algorithms can be studied while keeping the same simulation model. On the other hand, more complex simulation models for the drum boiler can be used to increase fidelity in the results or eliminate disturbances in the model caused by the controller. Finally, the proposed approach for the synthesis of operating procedures could be used in processes other than the drum boiler startup.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}