
CHARMIE: A Collaborative Healthcare and Home Service and Assistant Robot for Elderly Care

 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
2.1. System and Hardware
2.1.1. Motion Platform
2.1.2. Lifting Mechanism and Torso
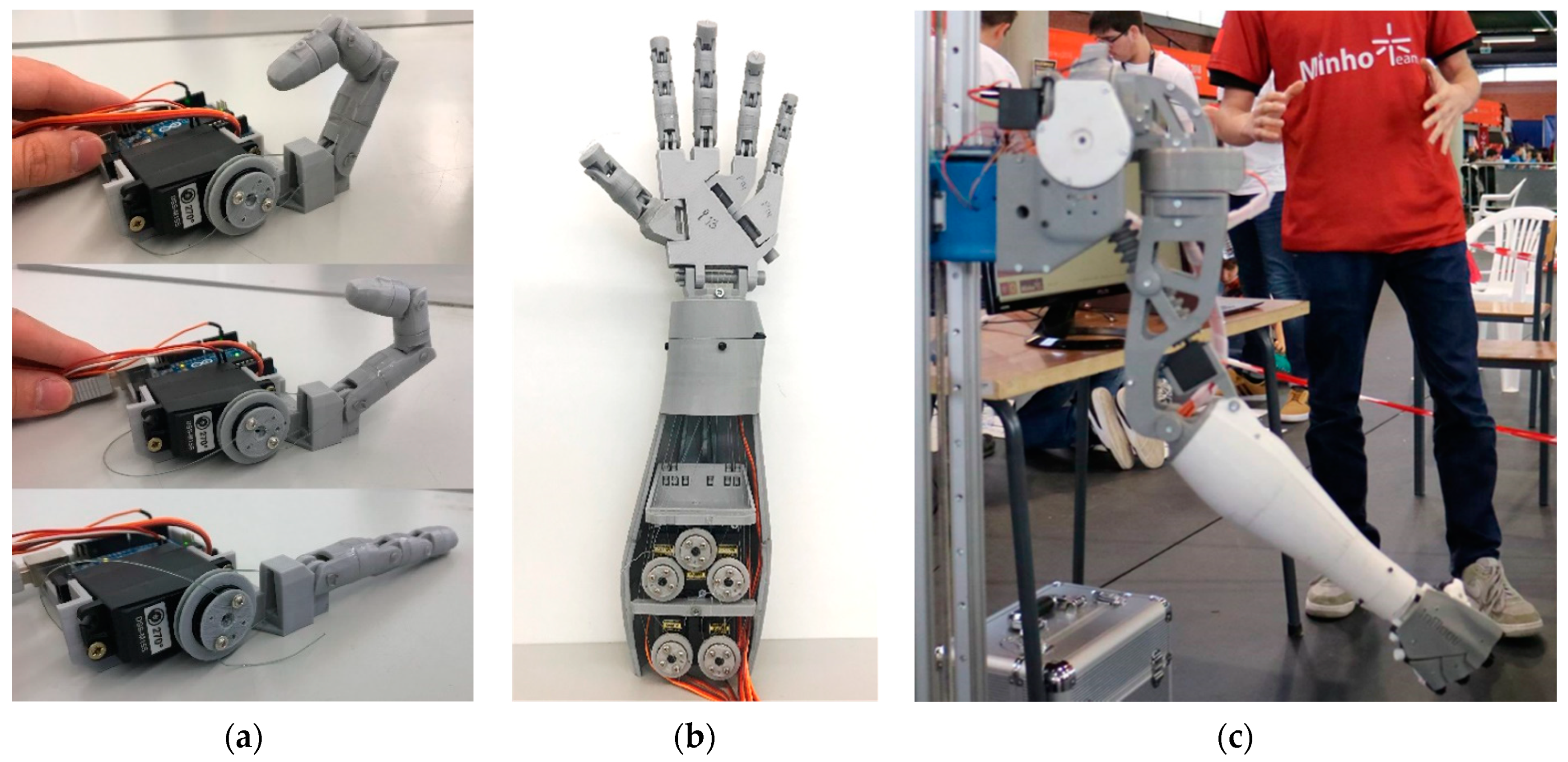
2.1.3. Robotic Arm
2.1.4. Robotic Head
2.2. Components
2.2.1. Sensor System
- Map building and self-localisation;
- Safe navigation (obstacle detection and avoidance);
- Human-robot interaction (user and pose/gesture detection);
- Object detection and subsequent manipulation.
2.2.2. Map Building and Self-Localisation
2.2.3. Navigation (Obstacle Detection and Avoidance)
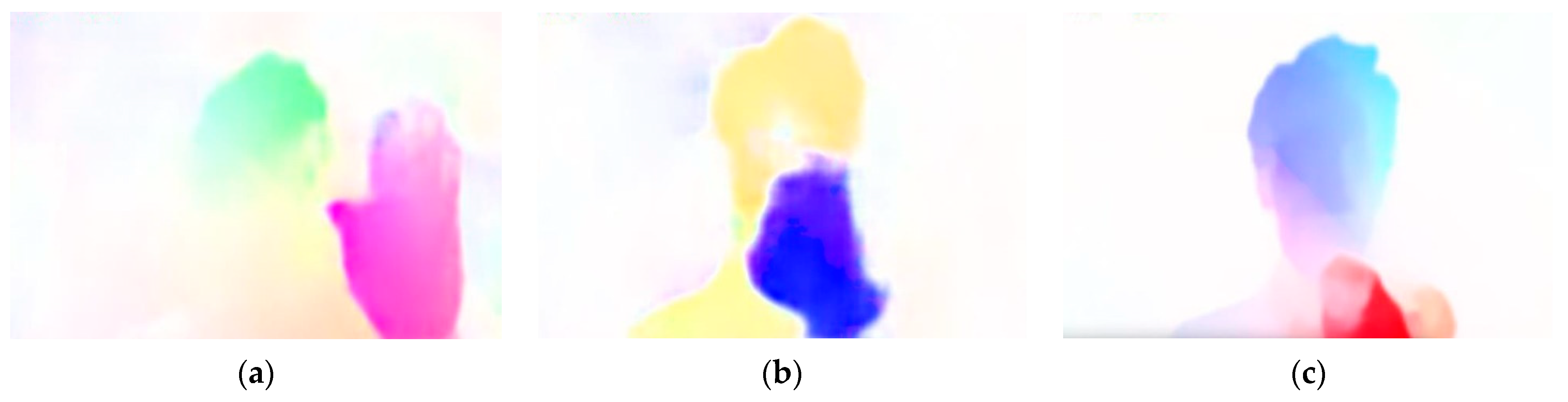
2.2.4. Human-Robot Interaction (User and Gesture Detection)
2.2.5. Object Detection and Subsequent Manipulation
3. Results
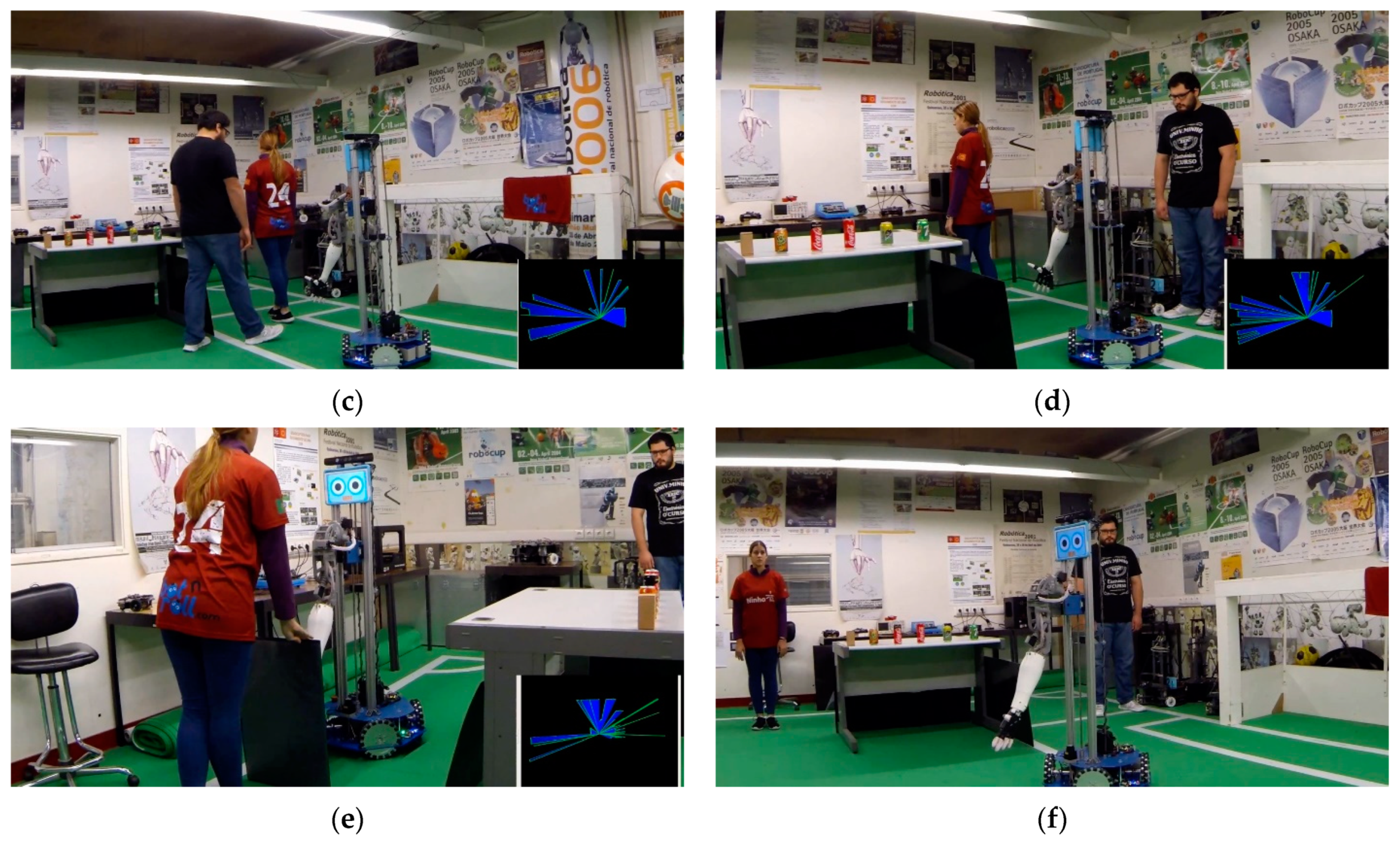
3.1. Help Me Carry This Bag
3.2. Can You Find This Item and Bring It to Me
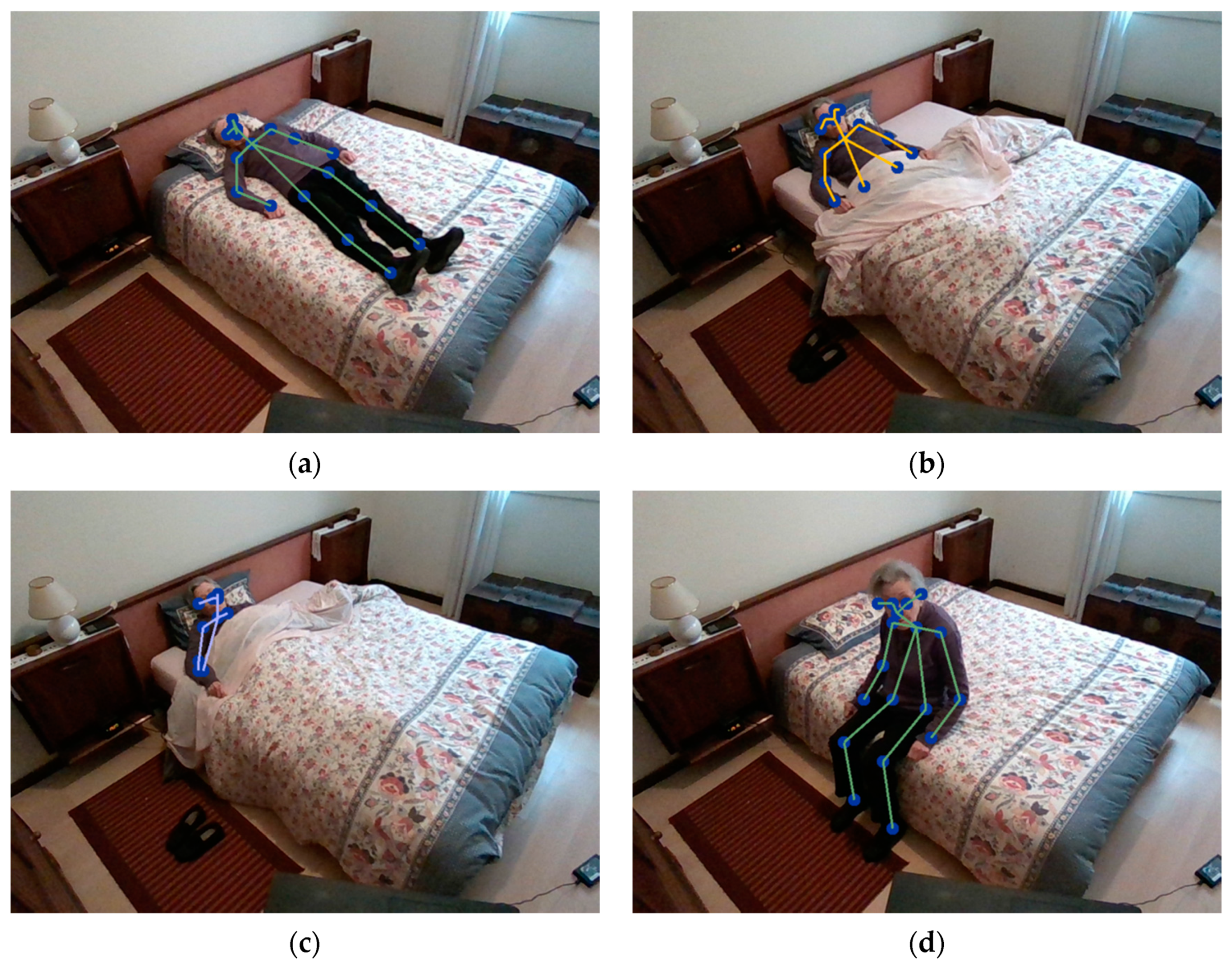
3.3. Check on the Patients
3.4. Store the Groceries” or “Clean up the Room
3.5. Follow Me” and “Lay the Table
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Video Link
References
- United Nations Department of Economic and Social Affairs. World Population Prospects 2019; United Nations: New York, NY, USA, 2019; ISBN 9789211483161. [Google Scholar]
- Eurostat, Population Structure and Ageing—Statistics Explained. 2016. Available online: https://ec.europa.eu/eurostat/statistics-explained/index.php?title=Population_structure_and_ageing (accessed on 1 August 2021).
- European Commission. The 2018 Ageing Report: Underlying Assumptions & Projection; European Commission: Brussels, Belgium, 2018; ISBN 9789279353512. [Google Scholar]
- Cristea, M.; Noja, G.G.; Stefea, P.; Sala, A.L. The Impact of Population Aging and Public Health Support on EU Labor Markets. Int. J. Environ. Res. Public Health 2020, 17, 1439. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- WHO. Global Strategy and Action Plan on Ageing and Health; WHO: Geneva, Switzerland, 2017; ISBN 9789241513500. [Google Scholar]
- Garmann-Johnsen, N.F.; Mettler, T.; Sprenger, M. Service Robotics in Healthcare: A Perspective for Information Systems Researchers? In Proceedings of the 35th International Conference on Information Systems (ICIS 2014), Auckland, New Zealand, 14 December 2014. [Google Scholar] [CrossRef]
- Kim, J.; Gu, G.M.; Heo, P. Robotics for healthcare. In Biomedical Engineering: Frontier Research and Converging Technologies; Springer International Publishing: Berlin, Germany, 2015; ISBN 9783319218137. [Google Scholar]
- Doelling, K.; Shin, J.; Popa, D.O. Service Robotics for the Home: A State of the Art Review. In Proceedings of the ACM International Conference Proceeding Series, Rhodes, Greece, 27 May 2014. [Google Scholar]
- Martinez-Martin, E.; Del Pobil, A.P. Personal robot assistants for elderly care: An overview. In Intelligent Systems Reference Library; Springer: Berlin, Germany, 2018. [Google Scholar]
- Yang, G.Z.; Nelson, B.J.; Murphy, R.R.; Choset, H.; Christensen, H.; Collins, S.H.; Dario, P.; Goldberg, K.; Ikuta, K.; Jacobstein, N.; et al. Combating COVID-19-The Role of Robotics in Managing Public Health and Infectious Diseases. Sci. Robot. 2020, 5, eabb5589. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shen, Y.; Guo, D.; Long, F.; Mateos, L.A.; Ding, H.; Xiu, Z.; Hellman, R.B.; King, A.; Chen, S.; Zhang, C.; et al. Robots under COVID-19 Pandemic: A Comprehensive Survey. IEEE Access 2021. [Google Scholar] [CrossRef]
- Khan, Z.H.; Siddique, A.; Lee, C.W. Robotics Utilization for Healthcare Digitization in Global COVID-19 Management. Int. J. Environ. Res. Public Health 2020, 17, 3819. [Google Scholar] [CrossRef] [PubMed]
- Holland, J.; Kingston, L.; McCarthy, C.; Armstrong, E.; O’Dwyer, P.; Merz, F.; McConnell, M. Service Robots in the Healthcare Sector. Robotics 2021, 10, 47. [Google Scholar] [CrossRef]
- Fischinger, D.; Einramhof, P.; Papoutsakis, K.; Wohlkinger, W.; Mayer, P.; Panek, P.; Hofmann, S.; Koertner, T.; Weiss, A.; Argyros, A.; et al. Hobbit, a Care Robot Supporting Independent Living at Home: First Prototype and Lessons Learned. Rob. Auton. Syst. 2016, 75, 60–78. [Google Scholar] [CrossRef]
- Coşar, S.; Fernandez-Carmona, M.; Agrigoroaie, R.; Pages, J.; Ferland, F.; Zhao, F.; Yue, S.; Bellotto, N.; Tapus, A. ENRICHME: Perception and Interaction of an Assistive Robot for the Elderly at Home. Int. J. Soc. Robot. 2020, 12, 779–805. [Google Scholar] [CrossRef] [Green Version]
- Abubakar, S.; Das, S.K.; Robinson, C.; Saadatzi, M.N.; Cynthia Logsdon, M.; Mitchell, H.; Chlebowy, D.; Popa, D.O. ARNA, a Service Robot for Nursing Assistance: System Overview and User Acceptability. IEEE Int. Conf. Autom. Sci. Eng. 2020, 2020, 1408–1414. [Google Scholar] [CrossRef]
- Stuede, M.; Westermann, K.; Schappler, M.; Spindeldreier, S. Sobi: An Interactive Social Service Robot for Long-Term Autonomy in Open Environments. arXiv 2021, arXiv:2105.03242. [Google Scholar]
- Alvito, P.; Marques, C.; Carriço, P.; Sequeira, J.; Gonçalves, D. Deliverable D2.2.1: MOnarCH Robots Hardware. 2014. Available online: http://users.isr.ist.utl.pt/~jseq/MOnarCH/Deliverables/D2.2.1_update.pdf (accessed on 1 August 2021).
- Holz, D.; Iocchi, L. Benchmarking Intelligent Service Robots through Scientific Competitions: The RoboCup @ Home Approach. In Proceedings of the AAAI Spring Symposium—Designing Intelligent Robots: Reintegrating AI II, Stanford University, Stanford, CA, USA, 25–27 March 2013. [Google Scholar]
- Basiri, M.; Piazza, E.; Matteucci, M.; Lima, P. Benchmarking Functionalities of Domestic Service Robots through Scientific Competitions. KI—Kunstl. Intelligenz 2019, 33, 357–367. [Google Scholar] [CrossRef]
- Iocchi, L.; Holz, D.; Ruiz-Del-Solar, J.; Sugiura, K.; Van Der Zant, T. RoboCup@Home: Analysis and Results of Evolving Competitions for Domestic and Service Robots. Artif. Intell. 2015, 229, 258–281. [Google Scholar] [CrossRef]
- Matamoros, M.; Seib, V.; Paulus, D. Trends, Challenges and Adopted Strategies in RoboCup@Home. In Proceedings of the 19th IEEE International Conference on Autonomous Robot Systems and Competitions, Gondomar, Portugal, 24–26 April 2019. [Google Scholar]
- Cousineau, J.; Le, H. Walking Machine @ Home 2019 Team Description Paper; RoboCup: Sydney, Australia, 2019; pp. 1–9. [Google Scholar]
- Perez, B.F.V.; Meneghetti, D.R.; Matiuci, E.; Neves, L.C.; Pimentel, F.; Melo, G.S.; Santos, J.V.M.; Gazignato, L.I.; Gonbata, M.Y.; Carvalho, M.G.; et al. RoboFEI @ Home Team Description Paper for RoboCup @ Home 2019; RoboCup: Sydney, Australia, 2019. [Google Scholar]
- Albar, B.; Joffroy, L. CATIE Robotics @ Home 2019 Team Description Paper; RoboCup: Sydney, Australia, 2019. [Google Scholar]
- Memmesheimer, R.; Mykhalchyshyna, I.; Wettengel, N.Y.; Evers, T.; Buchhold, L.; Schmidt, P.; Schmidt, N.; Germann, I.; Mints, M.; Rettler, G.; et al. RoboCup 2019—Homer@UniKoblenz (Germany); RoboCup: Sydney, Australia, 2019; Volume 2014, pp. 1–9. [Google Scholar]
- van der Burgh, M.F.B.; Lunenburg, J.J.M.; Appeldoorn, R.P.W.; van Beek, L.L.A.M.; Geijsberts, J.; Janssen, L.G.L.; van Dooren, P.; van Rooy, H.W.A.M.; Aggarwal, A.; Aleksandrov, S.; et al. Tech United Eindhoven @Home 2020 Team Description Paper; RoboCup: Dordeaux, France, 2020; pp. 1–9. [Google Scholar]
- Wang, M.; Deng, W. Deep Face Recognition: A Survey. Neurocomputing 2021. [Google Scholar] [CrossRef]
- Memmesheimer, R.; Seib, V.; Paulus, D. Homer@UniKoblenz: Winning Team of the Robocup@home Open Platform League 2017. In Proceedings of the Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics), Robot World Cup XXI, Cham, Switzerland, 2018; Springer International Publishing: Cham, Switzerland, 2018; pp. 509–520. [Google Scholar]
- Weber, T.; Triputen, S.; Danner, M.; Braun, S.; Schreve, K.; Rätsch, M. Follow Me: Real-Time in the Wild Person Tracking Application for Autonomous Robotics. In Proceedings of the Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics), RoboCup 2017: Robot World Cup XXI; Springer International Publishing: Cham, Switzerland, 2018; pp. 156–167. [Google Scholar]
- Martínez, L.; Loncomilla, P.; Ruiz-Del-solar, J. Object Recognition for Manipulation Tasks in Real Domestic Settings: A Comparative Study. In Proceedings of the Lecture Notes in Artificial Intelligence (Subseries of Lecture Notes in Computer Science), RoboCup 2014: Robot World Cup XVIII; Springer International Publishing: Cham, Switzerland, 2015; pp. 207–219. [Google Scholar]
- Massouh, N.; Brigato, L.; Iocchi, L. RoboCup@Home-Objects: Benchmarking Object Recognition for Home Robots. In Robot World Cup; Springer International Publishing: Berlin, Germany, 2019; Volume 11531. [Google Scholar] [CrossRef] [Green Version]
- Złotowski, J.; Proudfoot, D.; Yogeeswaran, K.; Bartneck, C. Anthropomorphism: Opportunities and Challenges in Human–Robot Interaction. Int. J. Soc. Robot. 2015, 7, 347–360. [Google Scholar] [CrossRef]
- Gonçalves, F.; Ribeiro, T.; Garcia, I.; Ribeiro, F.A.; Monteiro, C.; Lopes, G. Development of an Anthropomorphic Mobile Manipulator with Human, Machine and Environment Interaction. FME Trans. 2019, 47, 790–801. [Google Scholar] [CrossRef]
- Portugal, D.; Alvito, P.; Christodoulou, E.; Samaras, G.; Dias, J. A Study on the Deployment of a Service Robot in an Elderly Care Center. Int. J. Soc. Robot. 2019, 11, 317–341. [Google Scholar] [CrossRef]
- Reddy, K.V.; Kodati, M.; Chatra, K.; Bandyopadhyay, S. A Comprehensive Kinematic Analysis of the Double Wishbone and MacPherson Strut Suspension Systems. Mech. Mach. Theory 2016, 105, 441–470. [Google Scholar] [CrossRef]
- Van der Burgh, M.F.B.; Lunenburg, J.J.M.; Appeldoorn, R.P.W.; Wijnands, R.W.J.; Clephas, T.T.G.; Baeten, M.J.J.; Van Beek, L.L.A.M.; Ottervanger, R.A.; Van Rooy, H.W.A.M.; van de Molengraft, M.J.G. Tech United Eindhoven @Home 2017 Team Description Paper. In RoboCup@Home; RoboCup@Home: Nagoya, Japan, 2017; Volume 10. [Google Scholar]
- Lunenburg, J.J.M.; Coenen, S.A.M.; van den Dries, S.; Elfring, J.; Janssen, R.J.M.; Sandee, J.H.; van de Molengraft, M.J.G. Tech United Eindhoven Team Description 2013. In Proceedings of the 17th RoboCup International Symposium (May 2013), Eindhoven, The Netherlands, 24–30 June 2013; pp. 1–8. [Google Scholar]
- Garcia, I.; Gonçalves, F.; Ribeiro, T.; Fernandes, P.; Rocha, C.; Boucinha, R.; Lopes, G.; Ribeiro, A.F. Autonomous 4DOF Robotic Manipulator Prototype for Industrial Environment and Human Cooperation. In Proceedings of the 19th IEEE International Conference on Autonomous Robot Systems and Competitions, Gondomar, Portugal, 24–26 April 2019. [Google Scholar]
- Paik, J.K.; Shin, B.H.; Bang, Y.B.; Shim, Y.B. Development of an Anthropomorphic Robotic Arm and Hand for Interactive Humanoids. J. Bionic Eng. 2012, 9, 133–142. [Google Scholar] [CrossRef]
- Langevin, G. InMoov—Open Source 3D Printed Life-Size Robot. Available online: https://inmoov.fr/ (accessed on 1 August 2021).
- Llop-Harillo, I.; Pérez-González, A.; Andrés-Esperanza, J. Grasping Ability and Motion Synergies in Affordable Tendon-Driven Prosthetic Hands Controlled by Able-Bodied Subjects. Front. Neurorobot. 2020, 14, 57. [Google Scholar] [CrossRef] [PubMed]
- Zhou, J.; Yi, J.; Chen, X.; Liu, Z.; Wang, Z. BCL-13: A 13-DOF Soft Robotic Hand for Dexterous Grasping and in-Hand Manipulation. IEEE Robot. Autom. Lett. 2018, 3, 3379–3386. [Google Scholar] [CrossRef]
- Lopes, A.G.T.; Ribeiro, A.F.M.; Pereira, D.C.; Neves, F.M.A.; Garcia, I.S.M.; Ribeiro, J.C.L.; Ferreira, J.F.R.; Fernandes, P.N.L.; Ribeiro, T.A. CHARMIE, Minho Team @ Home 2017 Team Description Paper; RoboCup@Home: Nagoya, Japan, 2017. [Google Scholar]
- Rosten, E.; Porter, R.; Drummond, T. Faster and Better: A Machine Learning Approach to Corner Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 105–119. [Google Scholar] [CrossRef] [Green Version]
- Hornung, A.; Wurm, K.M.; Bennewitz, M.; Stachniss, C.; Burgard, W. OctoMap: An Efficient Probabilistic 3D Mapping Framework Based on Octrees. Auton. Robots 2013, 34, 189–206. [Google Scholar] [CrossRef] [Green Version]
- Xiaoyu, W.; Caihong, L.; Li, S.; Ning, Z.; Hao, F. On Adaptive Monte Carlo Localization Algorithm for the Mobile Robot Based on ROS. In Proceedings of the 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 5207–5212. [Google Scholar]
- Monteiro, S.; Bicho, E. A Dynamical Systems Approach to Behavior-Based Formation Control. In Proceedings of the Proceedings—IEEE International Conference on Robotics and Automation, Washington, DC, USA, 30 May 2002. [Google Scholar]
- Fernando, R.; Lopes, G.; Maia, T.; Ribeiro, H.; Silva, P.; Roriz, R.; Ferreira, N. Motion Control of Mobile Autonomous Robots Using Non-Linear Dynamical Systems Approach. In Proceedings of the CONTROLO, Guimarães, Portugal, 14–16 September 2016; pp. 409–421. [Google Scholar]
- Schulman, J.; Levine, S.; Moritz, P.; Jordan, M.; Abbeel, P. Trust Region Policy Optimization. In Proceedings of the 32nd International Conference on Machine Learning, Lille, France, 7–9 July 2015. [Google Scholar]
- Schulman, J.; Wolski, F.; Dhariwal, P.; Radford, A.; Klimov, O. Proximal Policy Optimization Algorithms. arXiv 2017, arXiv:1707.06347. [Google Scholar]
- Lillicrap, T.P.; Hunt, J.J.; Pritzel, A.; Heess, N.; Erez, T.; Tassa, Y.; Silver, D.; Wierstra, D. Continuous Control with Deep Reinforcement Learning. arXiv 2016, arXiv:1509.02971. [Google Scholar]
- Abdolmaleki, A.; Springenberg, J.T.; Tassa, Y.; Munos, R.; Heess, N.; Riedmiller, M. Maximum a Posteriori Policy Optimisation. In Proceedings of the 6th International Conference on Learning Representations, ICLR 2018—Conference Track Proceedings, Vancouver, BC, Canada, 30 April–3 May 2018. [Google Scholar]
- Ribeiro, T.; Gonçalves, F.; Garcia, I.; Lopes, G.; Ribeiro, A.F. Q-Learning for Autonomous Mobile Robot Obstacle Avoidance. In Proceedings of the 2019 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Gondomar, Portugal, 24–26 April 2019. [Google Scholar] [CrossRef]
- Ribeiro, T. Deep Reinforcement Learning for Robot Navigation Systems; Repositorium, University of Minho: Braga, Portugal, 2019. [Google Scholar]
- Tai, L.; Paolo, G.; Liu, M. Virtual-to-Real Deep Reinforcement Learning: Continuous Control of Mobile Robots for Mapless Navigation. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Zhang, K.; Zhang, Z.; Li, Z.; Qiao, Y. Joint Face Detection and Alignment Using Multitask Cascaded Convolutional Networks. IEEE Signal Process. Lett. 2016, 23, 1499–1503. [Google Scholar] [CrossRef] [Green Version]
- Szegedy, C.; Ioffe, S.; Vanhoucke, V.; Alemi, A.A. Inception-v4, Inception-ResNet and the Impact of Residual Connections on Learning. In Proceedings of the 31st AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 7–12 February 2017. [Google Scholar]
- Huang, G.B.; Mattar, M.; Berg, T.; Labeled, E.L.; Images, R.; Learned-miller, E. Labeled Faces in the Wild: A Database for Studying Face Recognition in Unconstrained Environments. HAL Archives-Ouvertes. In Workshop on Faces in’Real-Life’Images: Detection, Alignment, and Recognition. 2008. Available online: https://hal.inria.fr/inria-00321923/ (accessed on 1 August 2021).
- Li, B.Y.L.; Mian, A.S.; Liu, W.; Krishna, A. Using Kinect for Face Recognition under Varying Poses, Expressions, Illumination and Disguise. In Proceedings of the IEEE Workshop on Applications of Computer Vision, Clearwater Beach, FL, USA, 15–17 January 2013. [Google Scholar]
- Schroff, F.; Kalenichenko, D.; Philbin, J. FaceNet: A Unified Embedding for Face Recognition and Clustering. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 12 June 2015. [Google Scholar]
- Huang, C.C.; Nguyen, M.H. Robust 3D Skeleton Tracking Based on Openpose and a Probabilistic Tracking Framework. In Proceedings of the Conference Proceedings—IEEE International Conference on Systems, Man and Cybernetics, Bari, Italy, 6–9 October 2019. [Google Scholar]
- Cao, Z.; Hidalgo, G.; Simon, T.; Wei, S.E.; Sheikh, Y. OpenPose: Realtime Multi-Person 2D Pose Estimation Using Part Affinity Fields. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 172–186. [Google Scholar] [CrossRef] [Green Version]
- Ilg, E.; Mayer, N.; Saikia, T.; Keuper, M.; Dosovitskiy, A.; Brox, T. FlowNet 2.0: Evolution of Optical Flow Estimation with Deep Networks. In Proceedings of the Proceedings—30th IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Hui, T.W.; Tang, X.; Loy, C.C. LiteFlowNet: A Lightweight Convolutional Neural Network for Optical Flow Estimation. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 23 June 2018. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 30 June 2016. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| θ (deg) | d (mm) | l (mm) | α (deg) |
|---|---|---|---|
| 0.00 | 40.02 | −90.0 | |
| + 90 | 66.10 | 0.00 | 90.0 |
| + 90 | 287.83 | 31.04 | 90.0 |
| − 26.6 | 0.00 | 0.00 | −90.0 |
| 283.03 | 59.74 | 0.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ribeiro, T.; Gonçalves, F.; Garcia, I.S.; Lopes, G.; Ribeiro, A.F. CHARMIE: A Collaborative Healthcare and Home Service and Assistant Robot for Elderly Care. Appl. Sci. 2021, 11, 7248. https://0-doi-org.brum.beds.ac.uk/10.3390/app11167248
Ribeiro T, Gonçalves F, Garcia IS, Lopes G, Ribeiro AF. CHARMIE: A Collaborative Healthcare and Home Service and Assistant Robot for Elderly Care. Applied Sciences. 2021; 11(16):7248. https://0-doi-org.brum.beds.ac.uk/10.3390/app11167248
Chicago/Turabian StyleRibeiro, Tiago, Fernando Gonçalves, Inês S. Garcia, Gil Lopes, and António F. Ribeiro. 2021. "CHARMIE: A Collaborative Healthcare and Home Service and Assistant Robot for Elderly Care" Applied Sciences 11, no. 16: 7248. https://0-doi-org.brum.beds.ac.uk/10.3390/app11167248