
Flexible Vibrotactile Actuator Based on Dielectric Elastomer for Smart Handheld Devices



1
Interaction Laboratory, Advanced Research Technology Center, Korea University of Technology and Education, Chungjeol-ro, Byeongcheon-myeon, Dongnam-gu, Cheonan 31253, ChungNam, Korea
2
School of Computer Science, College of Engineering and Information Technology, Semyung University, Jecheon 27136, Chungcheongbuk-do, Korea
*
Author to whom correspondence should be addressed.
†
These authors contributed equally.
Appl. Sci. 2021, 11(24), 12020; https://0-doi-org.brum.beds.ac.uk/10.3390/app112412020
Submission received: 29 October 2021
/
Revised: 9 December 2021
/
Accepted: 14 December 2021
/
Published: 17 December 2021
(This article belongs to the Special Issue Haptics: Technology and Applications—2021)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:This paper presents an electroactive and soft vibrotactile actuator based on a dielectric elastomer. The vibrotactile actuator is composed of an upper layer, an adhesive tape layer, a dielectric layer with bumps, and a lower layer. When a voltage is applied to the actuator, an electrostatic force created between the upper and lower layers pulls the upper layer down, compressing the dielectric layer. As soon as the applied voltage is released, the upper layer is quickly restored to its initial state by the elastic force of the compressed dielectric elastomer. Because two forces contribute to the actuation at the same time, the created vibration is sufficiently strong to stimulate human mechanoreceptors. When the applied voltage is removed, the upper layer and dielectric elastomer return to their initial shapes. We conducted experiments to determine the best weight ratio of polydimethylsiloxane (PDMS) and Ecoflex, and to quantitatively investigate the haptic performance of the proposed vibrotactile actuator. The experiments clearly show that the plasticized vibrotactile actuator can create a variety of haptic sensations over a wide frequency range.
1. Introduction
Considering their abundant capabilities, smart devices have become an integral part of most people’s lives. Smart devices can provide absorbing and interesting content to users through multisensory channels (visual, auditory, and haptic). In particular, in the case of smart handheld devices, because the size of the visual display is not large enough to provide an immersive sensation to users, haptic information coupled with visual information enables users to delicately and immersively manipulate target objects. Haptic information is mainly created by small and lightweight vibrotactile actuators already embedded in smart handheld devices [1,2,3,4]. Recently, smart handheld devices have evolved into fully flexible types that maximize their usability and availability [5,6,7]. The currently available rigid vibrotactile actuators are limited from creating vibrotactile sensation in fully flexible devices, such devices having the ability to show diverse shapes. Therefore, it is necessary to consider flexible vibrotactile actuators that can change shape to create improved haptic sensations in fully flexible devices.
One of the most attractive methods for fabricating flexible vibrotactile actuators is the use of electroactive polymers (EAPs) [8,9,10,11,12,13,14]. Among EAPs, dielectric elastomers have many benefits, such as large displacement, moderate bandwidth, low power consumption, and low mechanical impedance compared to other electroactive polymers (ionic polymer metal composites, piezoelectric polymers, etc.) [15]. Many studies have been conducted on the fabrication of flexible actuators using dielectric elastomers [11,12,13,14]. T. Kurogi et al. proposed a dielectric elastomer-based flexible tactile display to create multiple mechanical stimuli [11]. H. Boys et al. suggested a soft wearable tactile display based on a hydrostatically coupled dielectric elastomer [12]. Ankit et al. fabricated a transparent and integrable surface texture change device based on a dielectric elastomer for localized tactile feedback [13]. J.-H. Youn et al. developed a wearable soft tactile actuator based on a dielectric elastomer (acrylic elastomer and Wacker Elastosil) [14].
Among the many dielectric elastomers available, polydimethylsiloxane (PDMS) is one of the most attractive materials because it can create a strong force to stimulate human mechanoreceptors. Other reasons are that it is durable, resilient, and moldable. D. Pyo et al. proposed a flexible vibrotactile actuator based on a pyramidal microstructured PDMS layer [16]. S. Yun et al. presented a transparent and flexible visuo-haptic interface using PDMS and a polymer waveguide [17]. X. Ji et al. developed a PDMS-based soft haptic actuator with thickness of 18 μm [18]. The magnitude of the vibrational force is a very important factor to create a variety of haptic sensations. If there is a huge force difference between absolute threshold and maximum force at a specific frequency, the user can feel the various haptic sensations. However, although these actuators can provide human-perceivable vibrotactile information, their vibrational force is not sufficiently strong to create a variety of haptic sensations.
Here, we present a PDMS-based soft vibrotactile actuator that creates a strong vibrational force to express a variety of haptic sensations by simply integrating an upper layer, an adhesive tape layer, a bumpy-shaped dielectric layer, and a lower layer. We then optimize the actuator by investigating the mechanical/dielectric properties of various prepared dielectric layer samples. The dielectric layer is sandwiched between the upper and lower layers. If we apply a voltage across the upper and lower layers, the dielectric layer is compressed in the thickness direction and is stretched in the longitudinal direction. However, because the dielectric layer is tightly encapsulated by the upper and lower layers, there is no space available that allows it to stretch. Therefore, to allow the dielectric layer to expand, we formed a ridged (bumpy) dielectric layer. Under an applied voltage, both a moving plate in the upper layer and the dielectric layer move downward. The combined motion of the two layers maximizes the haptic force.
The paper is organized as follows: Section 2 introduces the structure of the proposed vibrotactile actuator and its operating principle, and also presents a fabrication method of a dielectric layer. Section 3 experimentally optimized the proposed actuator and showed its haptic performance. In Section 4, we summarized our research work.
2. Design of Vibrotactile Actuator Based on Dielectric Elastomer
2.1. Structure of Proposed Vibrotactile Actuator and Its Operating Principles
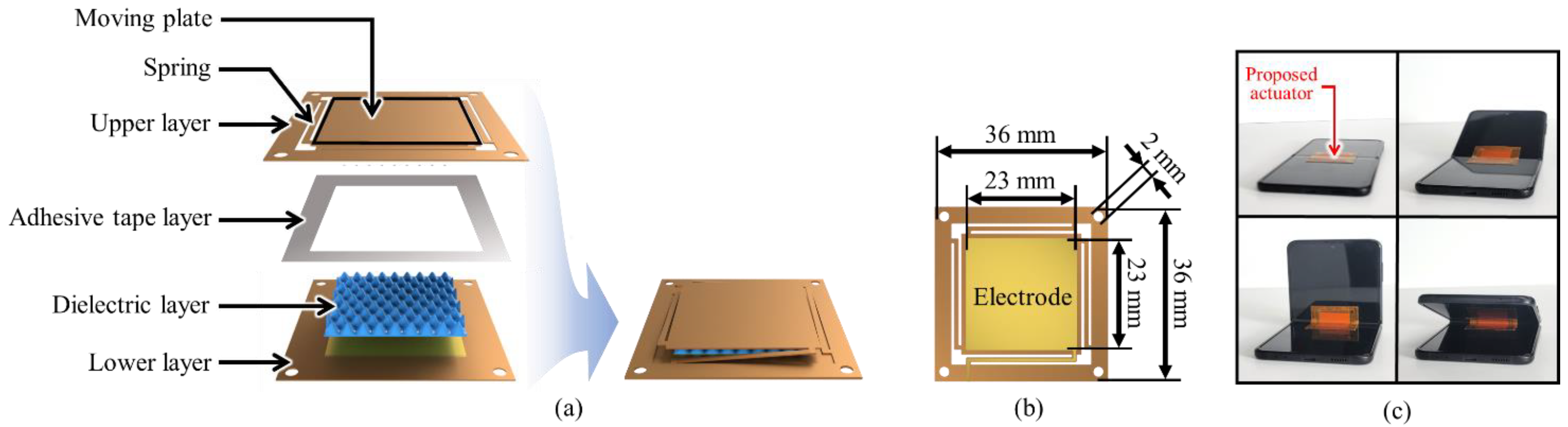
The proposed flexible vibrotactile actuator consists of an upper layer, an adhesive tape layer, a dielectric layer, and a lower layer, as shown in Figure 1a. The upper layer, which is made of polyimide film, is composed of a moving plate and four springs. The copper electrode is laminated to the bottom surface of the moving plate in the upper layer (Figure 1b). Another electrode is laminated to the top surface of the lower layer. The edges of the upper layer are bonded to the edges of the lower layer using a double-sided adhesive tape (we called it the adhesive tape layer). The dielectric layer is sandwiched between the upper and lower layers. The sizes of the upper and lower layers are 36 mm (L) × 36 mm (W) × 100 μm (T), and the sizes of the moving plate and dielectric layer are 23 mm × 23 mm × 100 μm and 23 mm × 23 mm × 450 μm, respectively. The overall size of the fabricated vibrotactile actuator is 36 mm × 36 mm × 650 μm. The proposed vibrotactile actuator is highly flexible and bendable enough to be attached to flexible and foldable devices as shown in Figure 1c.
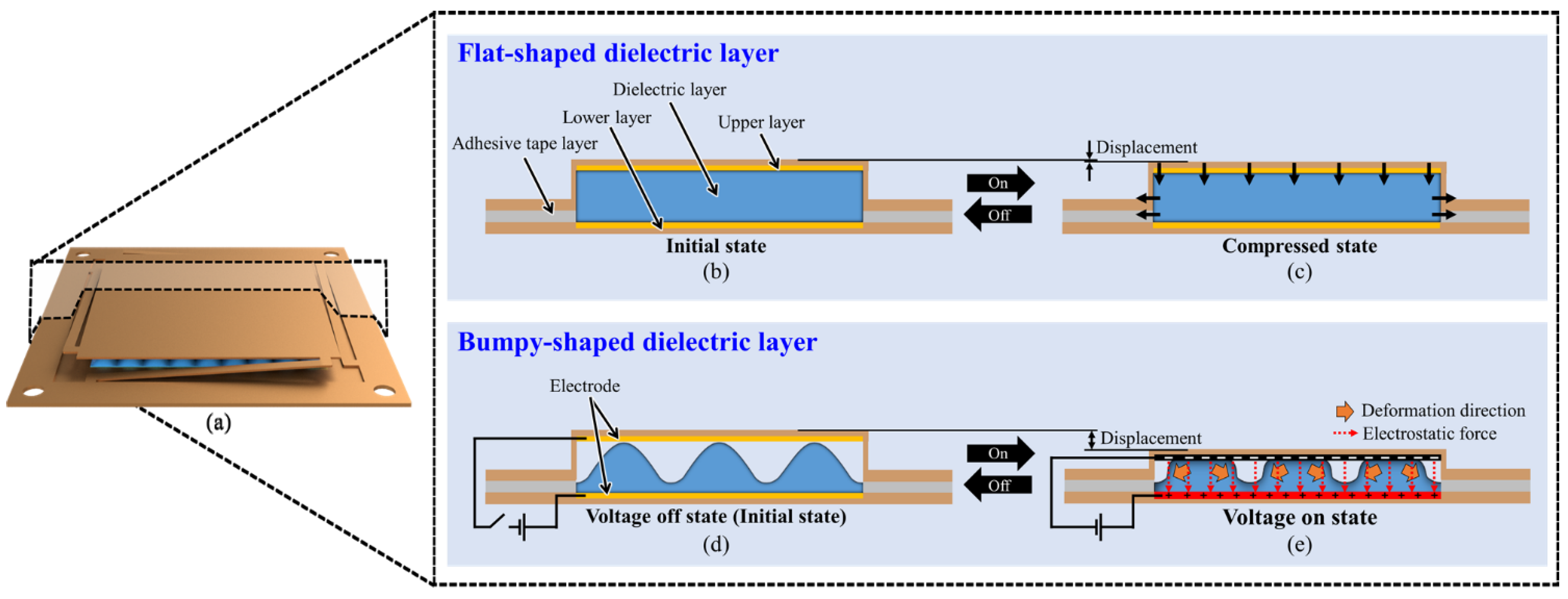
Figure 2 shows a cross-sectional view of the proposed vibrotactile actuator. As previously mentioned, the proposed vibrotactile actuator is composed of the upper layer, the adhesive tape layer, the dielectric layer, and the lower layer. In this structure, the dielectric layer is compressed along the thickness direction and is stretched along the horizontal direction when a voltage is applied to the actuator. The dielectric layer tends to bend under the applied voltage without stretching along its horizontal direction because both ends of the dielectric layer are fixed. The amount of bend increases with increasing voltage. However, there is no space available to allow this type of bending in the proposed actuator because of the sandwich structure, as shown in Figure 2b,c. Therefore, the length of the dielectric layer can be decreased or empty space can be created between the dielectric layer and the upper layer to allow bending. However, the decreased length makes the area that can create vibration narrow, and furthermore, having a thicker actuator due to the empty space not only makes the proposed actuator bulky but also makes its applying voltage higher. To avoid these issues, we fabricated a dielectric layer whose surface has a bumpy shape that allows actuator motion and therefore maximizes the haptic effect.
Figure 2d,e show the operating principle of the proposed actuator. Figure 2d shows the initial state without an applied voltage, and Figure 2e shows the state after applying voltage. When a voltage is applied to the proposed actuator, an electrostatic force is generated between the two parallel electrodes. This generated electrostatic force attracts the moving plate in the upper layer, causing it to move downward, compressing the bumpy-shaped dielectric layer. As a result, the dielectric layer is stretched along the horizontal direction and is compressed in the vertical direction [19]. Because of this effect, the ridges in the bumpy-shaped dielectric layer are stretched and compressed, resulting in a gently sloped shape (Figure 2e). As soon as the applied voltage is removed, the dielectric layer and the moving plate are returned to their initial shape by the four springs in the upper layer and by the elasticity of the dielectric layer. It means that under the voltage input, the actuator is compressed. As soon as the applied voltage is released, the actuator is quickly back to the initial shape. Due to this reason, while a periodical sinusoidal AC voltage is applied to the proposed actuator, the actuator continuously repeats the compression and restoration, resulting in vibration. In our structure, because two energies contribute to the generation of vibrations, we can increase the haptic performance.
2.2. Fabrication of the Bumpy-Shaped Dielectric Layer
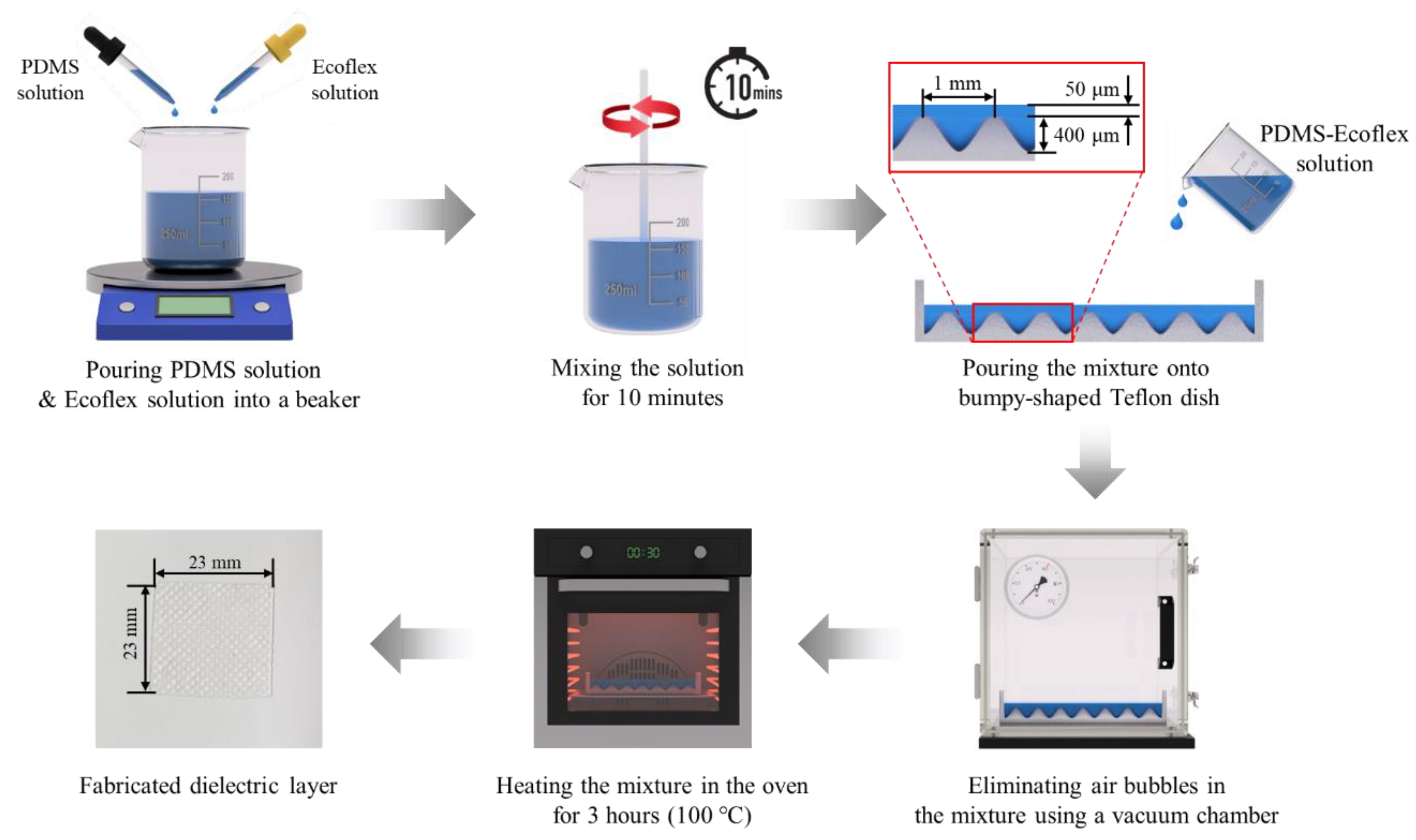
Figure 3 shows the fabrication process for the proposed bumpy-shaped dielectric layer. To fabricate the dielectric layer, we poured polydimethylsiloxane (PDMS, Sylgard184, Dow Corning Corp., Midland, TX, USA) and Ecoflex solution (Ecoflex-0010™, Smooth-On Inc., Easton, PA, USA) into a beaker and then stirred the PDMS–Ecoflex solution for 10 min. The mixed solution was dribbled onto a bumpy-patterned Teflon dish, and the dish was placed in a vacuum chamber to remove any bubbles in the mixture. The PDMS–Ecoflex mixture was then placed in an oven and heated to 100 °C for 3 h. Finally, the bumpy-shaped dielectric layer was obtained by removing the mixture from the oven, allowing it to cool, and removing the membrane from the Teflon dish.
3. Experiments and Results
The haptic performance of the proposed actuator is directly affected by the electrostatic force between two parallel layers and the mechanical and dielectric properties of the bumpy-shaped dielectric layer. If the dielectric layer is too rigid, the vibrational displacement of the proposed actuator becomes too small to create a strong vibration. In contrast, the use of too soft a dielectric layer can absorb the vibrations generated by the proposed actuator. Therefore, the best mechanical properties of the dielectric layer that maximize the haptic performance must be investigated. Furthermore, the higher the dielectric constant of the dielectric layer, the higher the electrostatic force (Maxwell stress) of the actuator based on the dielectric layer [20]. As a result, the haptic performance of the actuator based on the dielectric layer increases. The dielectric and mechanical properties are influenced by the weight ratio of PDMS to Ecoflex. For this reason, we prepared six dielectric layer samples having different weight ratios of PDMS and Ecoflex to investigate the effects of the dielectric and mechanical properties of the bumpy-shaped dielectric layer. The weight ratios of PDMS to Ecoflex were 1:0, 1:3, 1:4, 1:5, 1:6, and 1:7, and are referred to as dielecl1:0, dielecl1:3, dielecl1:4, dielecl1:5, dielecl1:6, and dielecl1:7, respectively.
3.1. Mechanical Properties of the Dielectric Layer
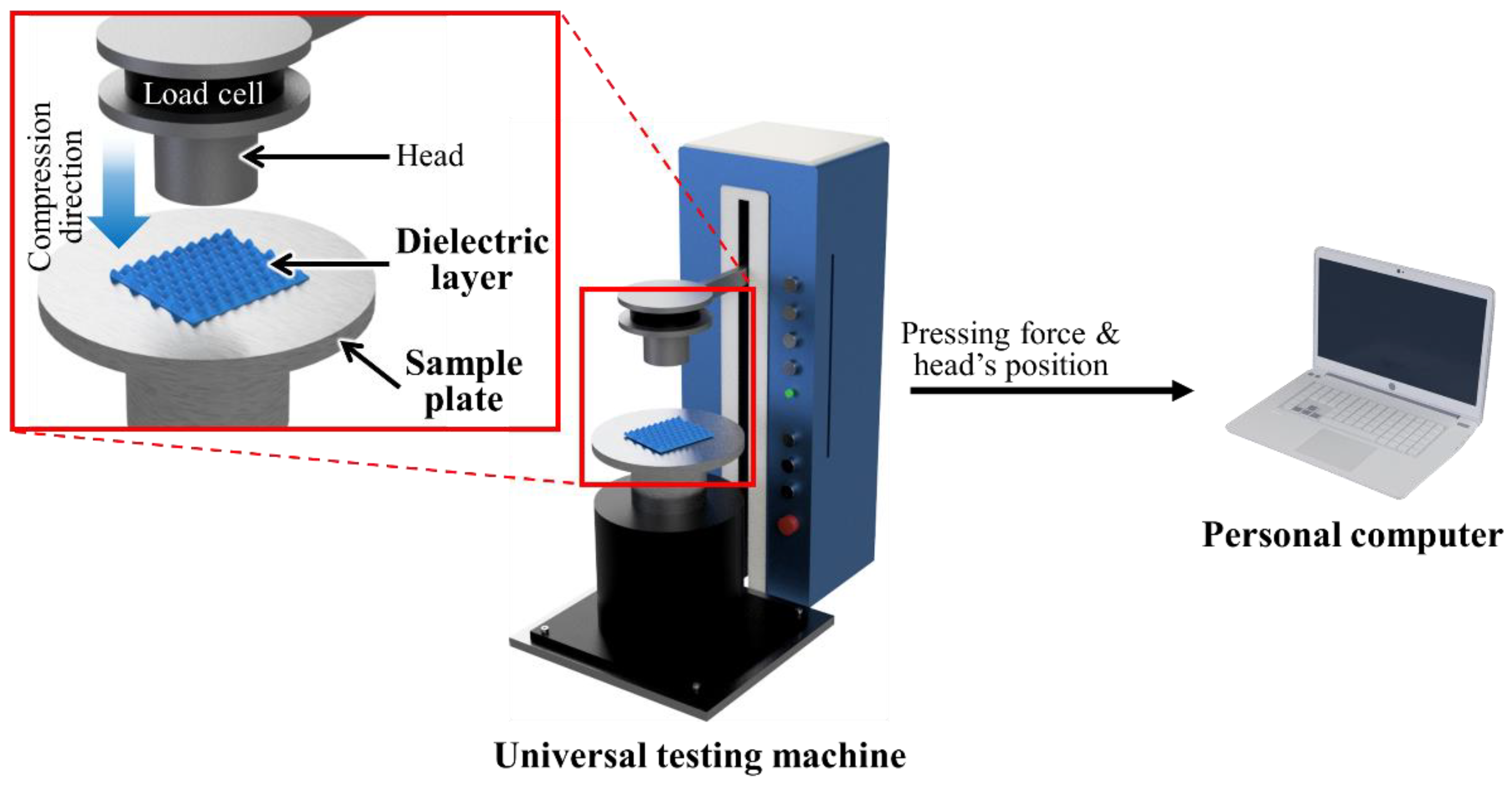
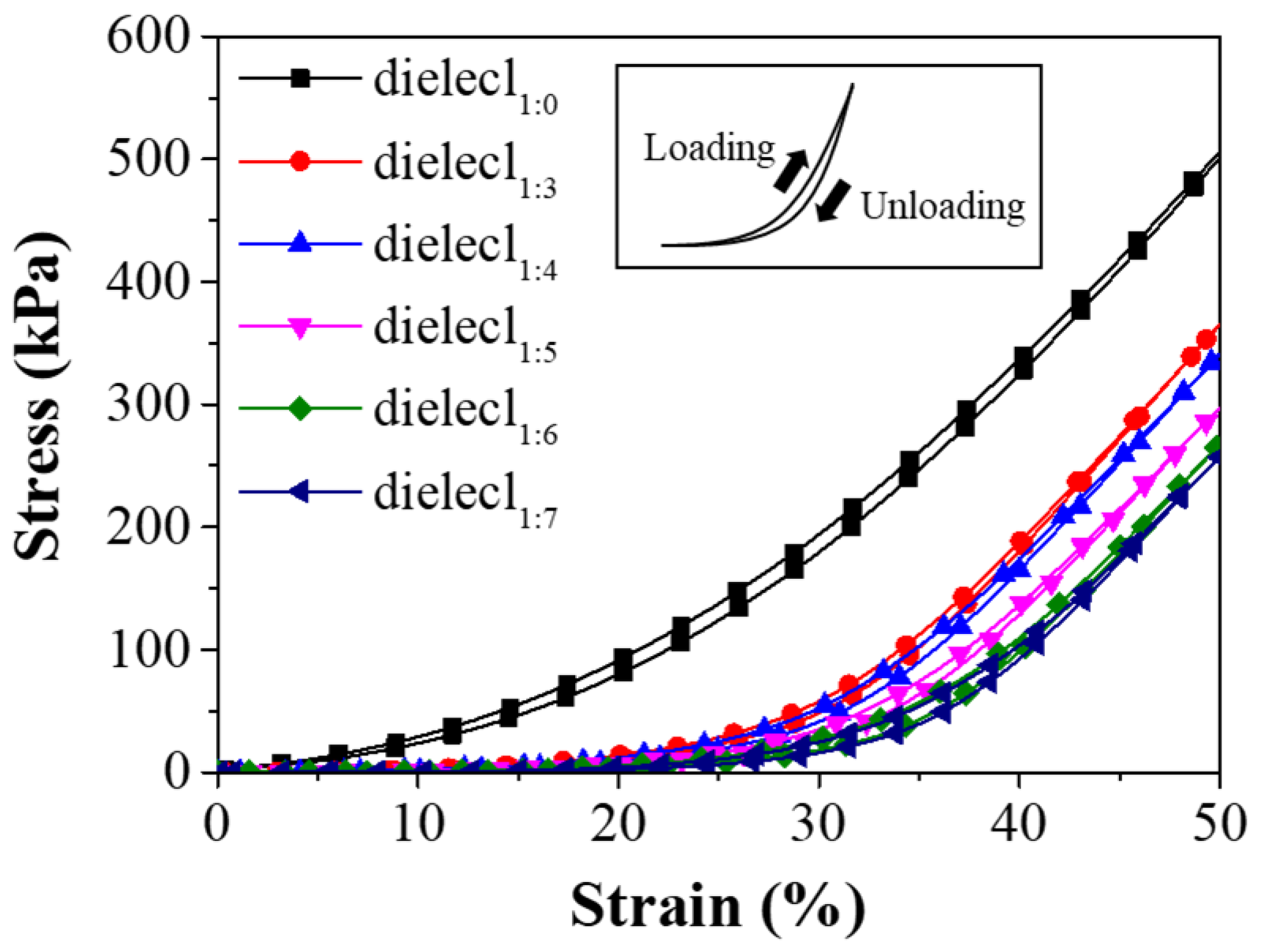
We constructed an experimental setup consisting of a loadcell (Xforce P, Zwick/Roell Co., Ulm, Germany), a dielectric layer, a sample plate, a universal testing machine (UTM, Z0.5, Zwick/Roell Co., Ulm, Germany), and a personal computer (PC) to investigate the influence of Ecoflex on the mechanical properties of the dielectric layer, as shown in Figure 4. Each prepared dielectric layer was placed on the sample plate and pressed by the head of the UTM. During compression, we measured the pressing force using the loadcell and understood the position of the head using an encoder in the UTM. Subsequently, the pressing force and head position were fed to the PC. Figure 5 shows the hysteresis loops of all prepared samples after 100 repetitions (loading and unloading). The results show that the greater amount of Ecoflex used, the softer the dielectric layer became. Among the samples, the Young’s modulus of pure PDMS (dielecl1:0) was much higher than that of the other samples.
3.2. Dielectric Properties of the Dielectric Layer
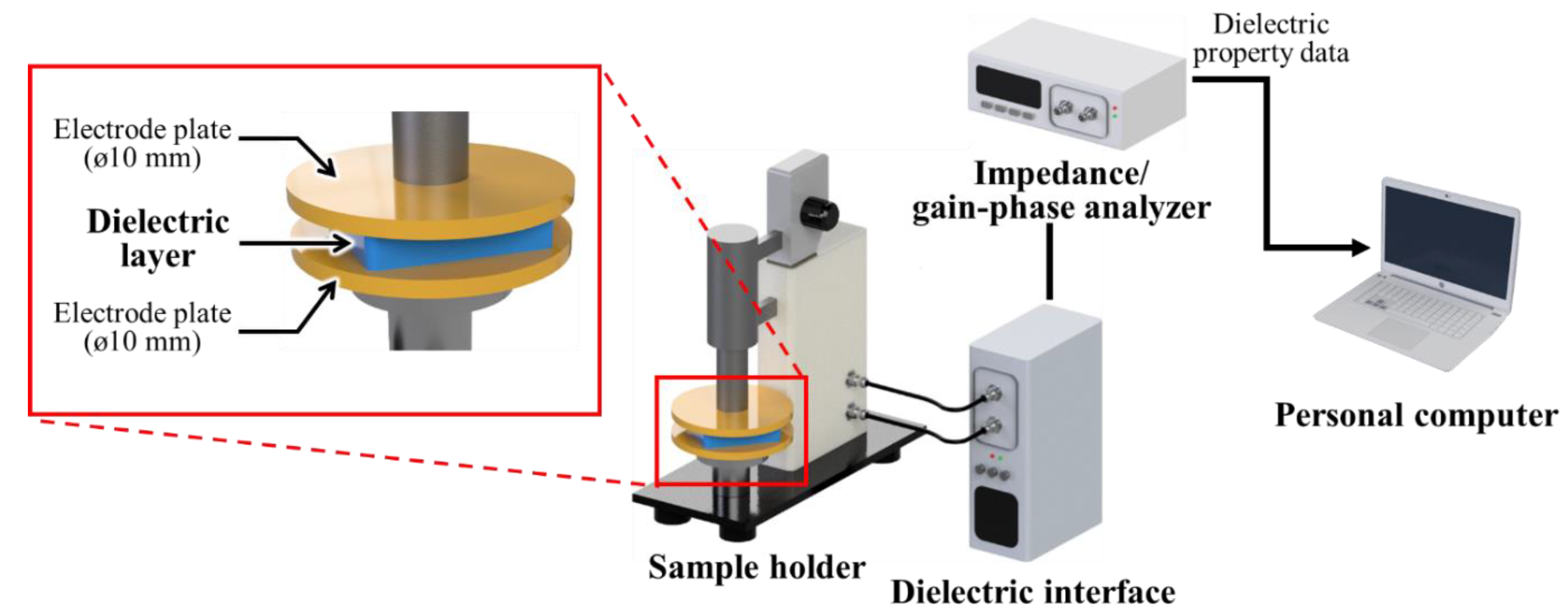
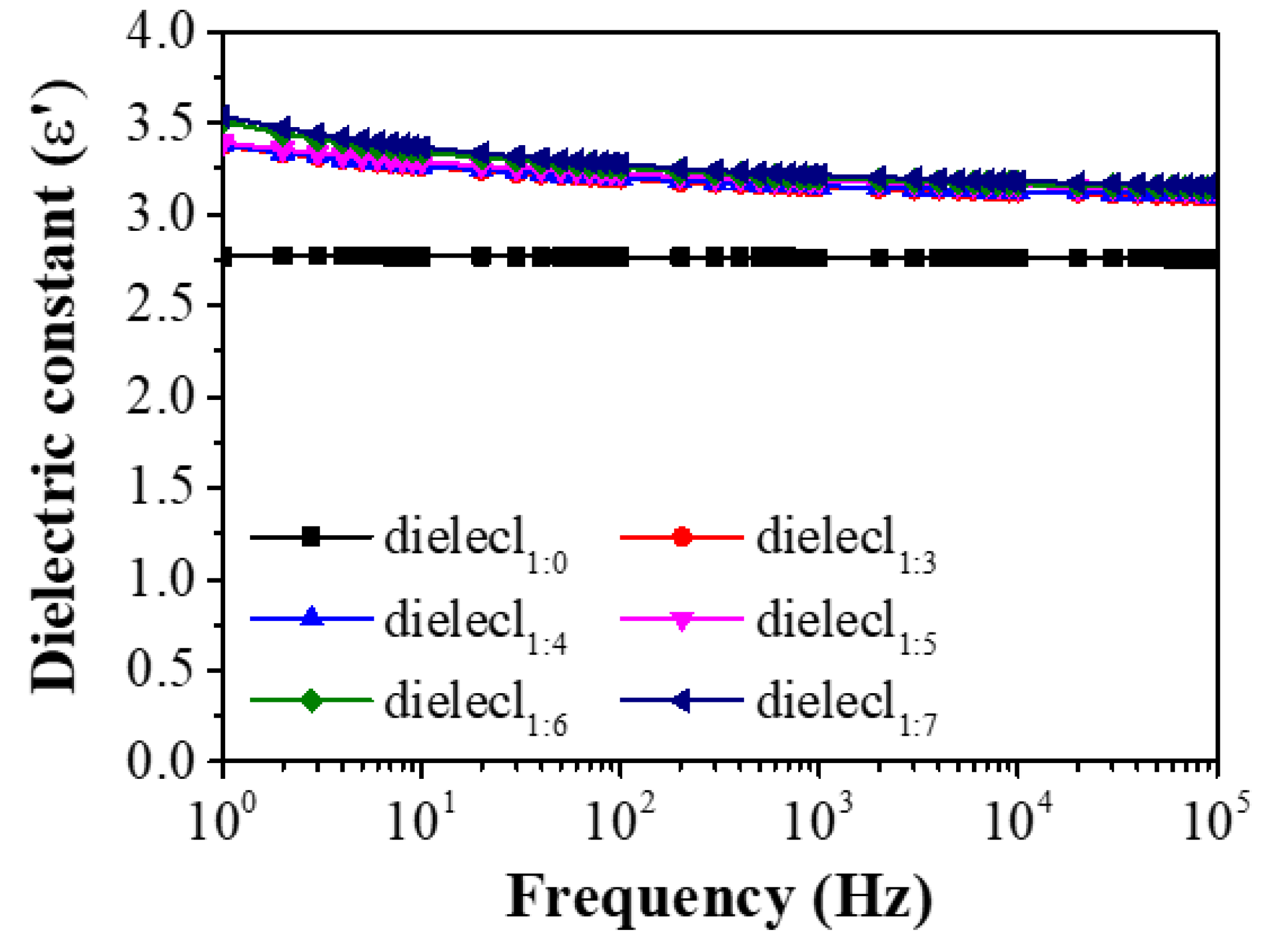
The dielectric properties of the dielectric layer are an important factor in determining the compression strength caused by the electrostatic force [20]. The experimental setup was composed of a dielectric layer, a sample holder with two electrode plates (diameter of 10 mm each), an impedance/gain-phase analyzer (SI-1260, Solatron Analytical Co., Farnborough, UK) coupled with a dielectric interface (SI-1296, Solatron Analytical Co., Farnborough, UK), and a personal computer (PC), as shown in Figure 6. We prepared samples having the same ratios as used in the previous experiment. Each dielectric layer sample was placed between the two parallel electrode plates to obtain its dielectric properties. The obtained dielectric properties of each sample were stored on the PC. Figure 7 shows the measured dielectric constants of the six dielectric layer samples as a function of frequency. The dielectric constant of pure PDMS was the lowest among the prepared samples and was almost constant, regardless of the frequency variation. The higher the Ecoflex content in the sample, the higher the dielectric constant becomes. As shown in Figure 5 and Figure 7, the Ecoflex content in the samples affects both the dielectric and mechanical properties.
3.3. Haptic Performance of the Proposed Actuator
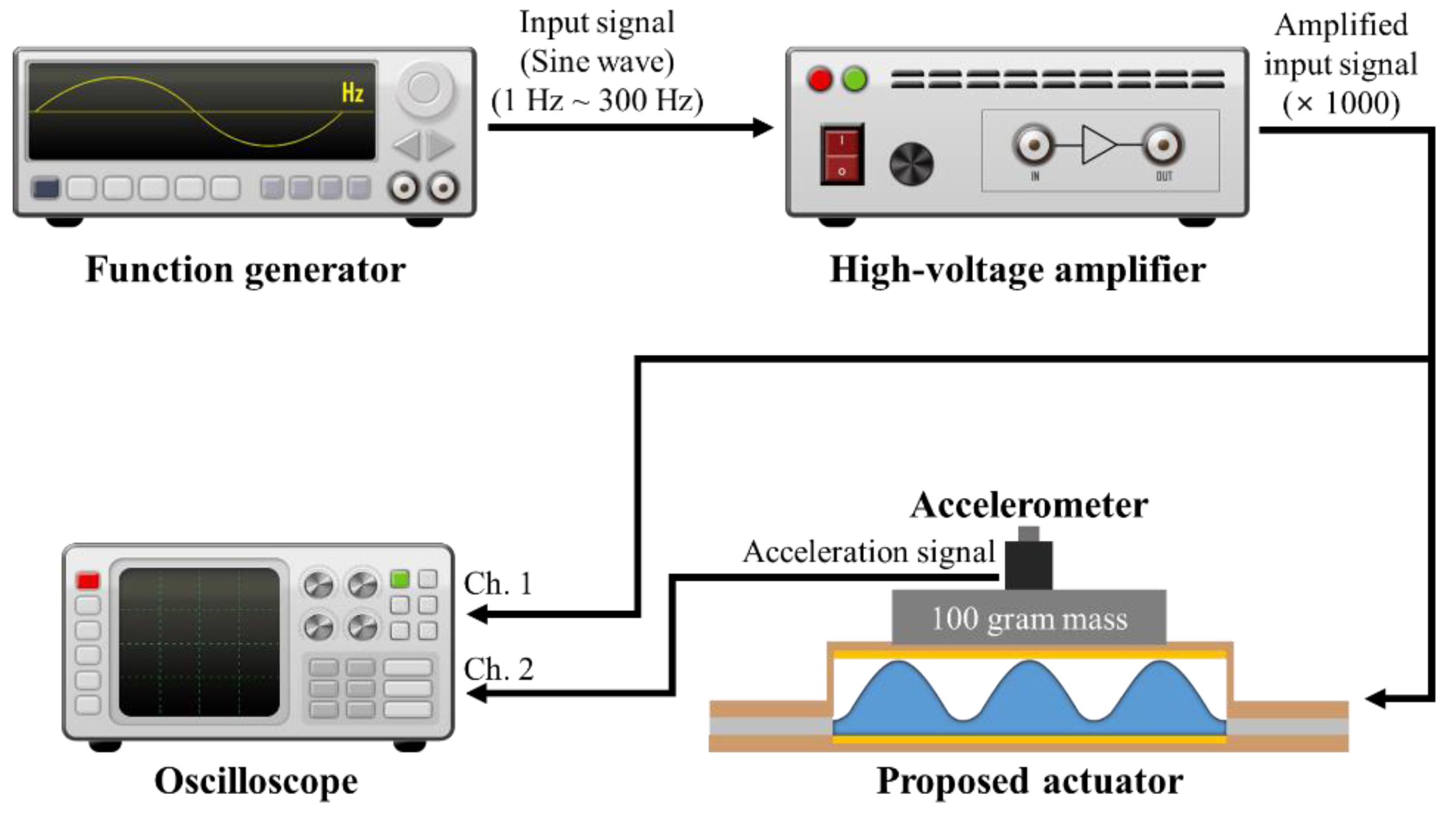
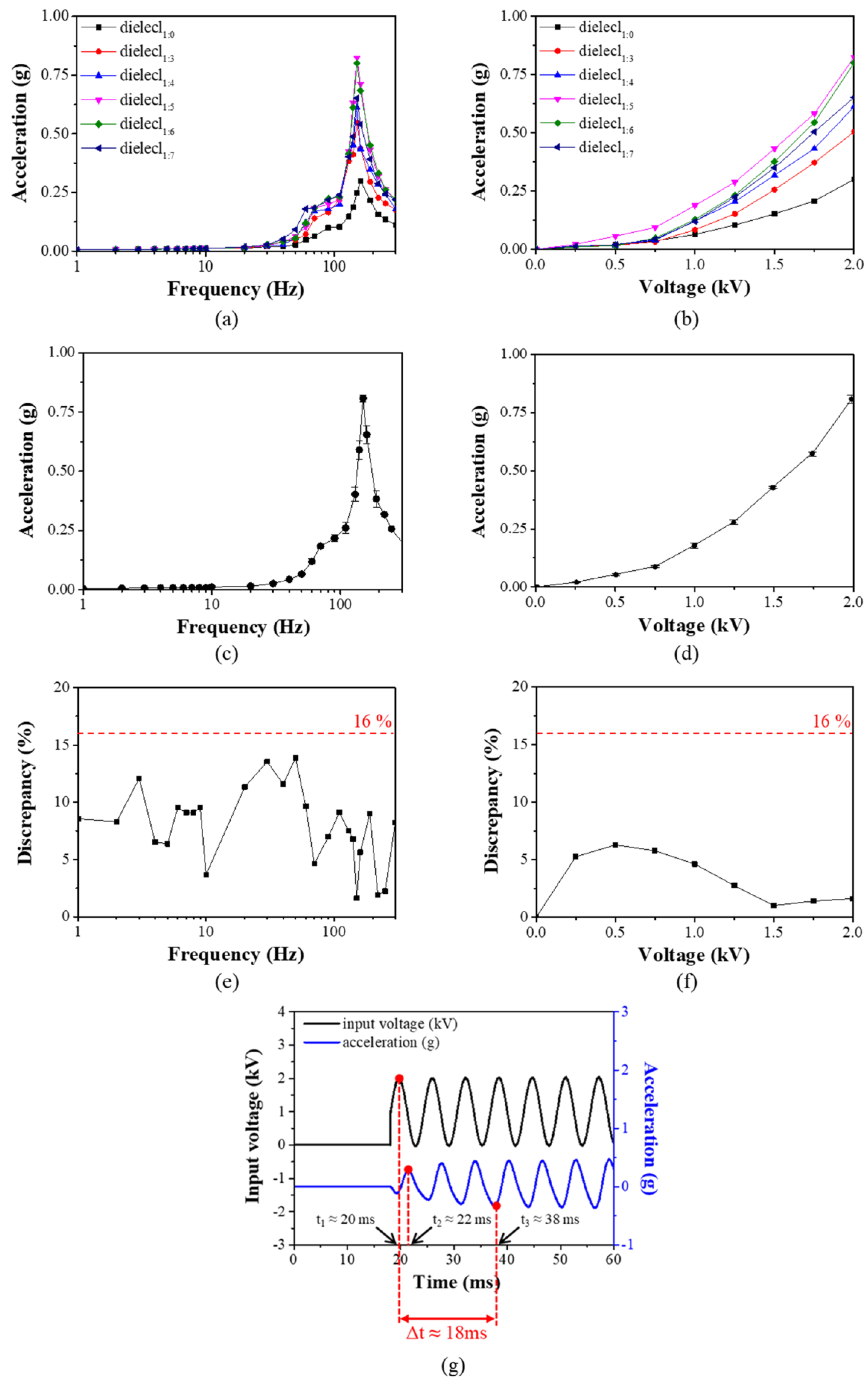
To find the best weight ratio of PDMS to Ecoflex, we prepared six dielectric layer samples as mentioned above and fabricated six corresponding vibrotactile actuators. The haptic performance of each vibrotactile actuator was quantitatively verified using the experimental environment shown in Figure 8. We attached 100 g of mass to the proposed actuator, and then we placed an accelerometer (2.4 g, charge accelerometer type 4393, Bruel & Kjaer, Virum, Denmark) on the upper surface of the mass. The AC input voltage generated from the function generator (Protek 9305, GSInstech, Incheon, Korea) was amplified (1000 times) by the high-voltage amplifier (Trek 10/40A-HS, Trek Inc., New York, NY, USA). Subsequently, the amplified voltage was applied to an actuator. While applying the amplified input signal, we measured the vibration using an accelerometer and displayed the measured vibration on an oscilloscope (TDS1012B, Tektronix, Shanghai, China). In the first experiment, we investigated the frequency response of the proposed actuator by sweeping the frequency of the input signal from 1 Hz to 300 Hz using a fixed peak-to-peak input voltage of 2 kV (Figure 9a). As the amount of Ecoflex increases in the actuator, the maximum amplitude of the measured vibration increases. However, when the ratio of PDMS to Ecoflex exceeded 1:5, the maximum amplitude decreased. Therefore, the dielecl1:5-based vibrotactile actuator achieved the best performance among the prepared actuators.
Additionally, the haptic performance of the proposed actuator according to the amplitude of the input voltage is as important as its frequency response. In a second experiment, we measured the haptic behavior of the proposed actuator as a function of the amplitude of the input voltage at a fixed frequency of 150 Hz (resonant frequency) (Figure 9b). The vibration strength is proportional to the amplitude of the input voltage. Moreover, the dielecl1:5 based vibrotactile actuator has the highest performance among the prepared vibrotactile actuators.
In order to verify the reproducibility of the proposed actuator, we prepared five actuators based on the dielecl1:5, which shows the best haptic performance. We observed the haptic performance of the prepared five actuators as a function of the input frequency from 1 Hz to 300 Hz at the fixed amplitude (2 kVpp) (Figure 9c). Moreover, we investigated their haptic performance as a function of the input voltage at the resonant frequency (Figure 9d). As can be observed from Figure 9e,f, even though there are some discrepancies in the results of the vibrational force’s variation, the discrepancies are smaller than the just-noticeable difference (16%) [21], which is a differential threshold for the vibrational force that a human can reliably discriminate. It means that there is little variability due to the manufacturing of the actuator.
The response time is also an important factor in haptic performance. If the response time is too slow, a realistic haptic sensation cannot be provided to a user in real time. Therefore, we measured the response time of the proposed actuator based on dielecl1:5. The experimental setup was the same as that used in the first and second experiments. The amplitude of the applied voltage was fixed at 2 kVpp, and the frequency was fixed at 150 Hz (resonant frequency). Figure 9g shows the measured response time of the proposed vibrotactile actuator. The response time can be defined as the time difference between t1 and t2. We defined t1 as the moment the input voltage is at maximum and t2 as the moment the actuator generates the first maximum amplitude. However, the actuator may not create a large enough vibration to stimulate human mechanoreceptors at t2. Therefore, we conservatively computed the response time by subtracting t3 (when the vibrational output reached 90% of its maximum amplitude) from t1. The response time of the proposed actuator was observed as approximately 18 ms. The measured response time of the proposed actuator was faster than that of a commercially available linear resonant haptic actuator (<30 ms), which is the most widely used in handheld devices [22].
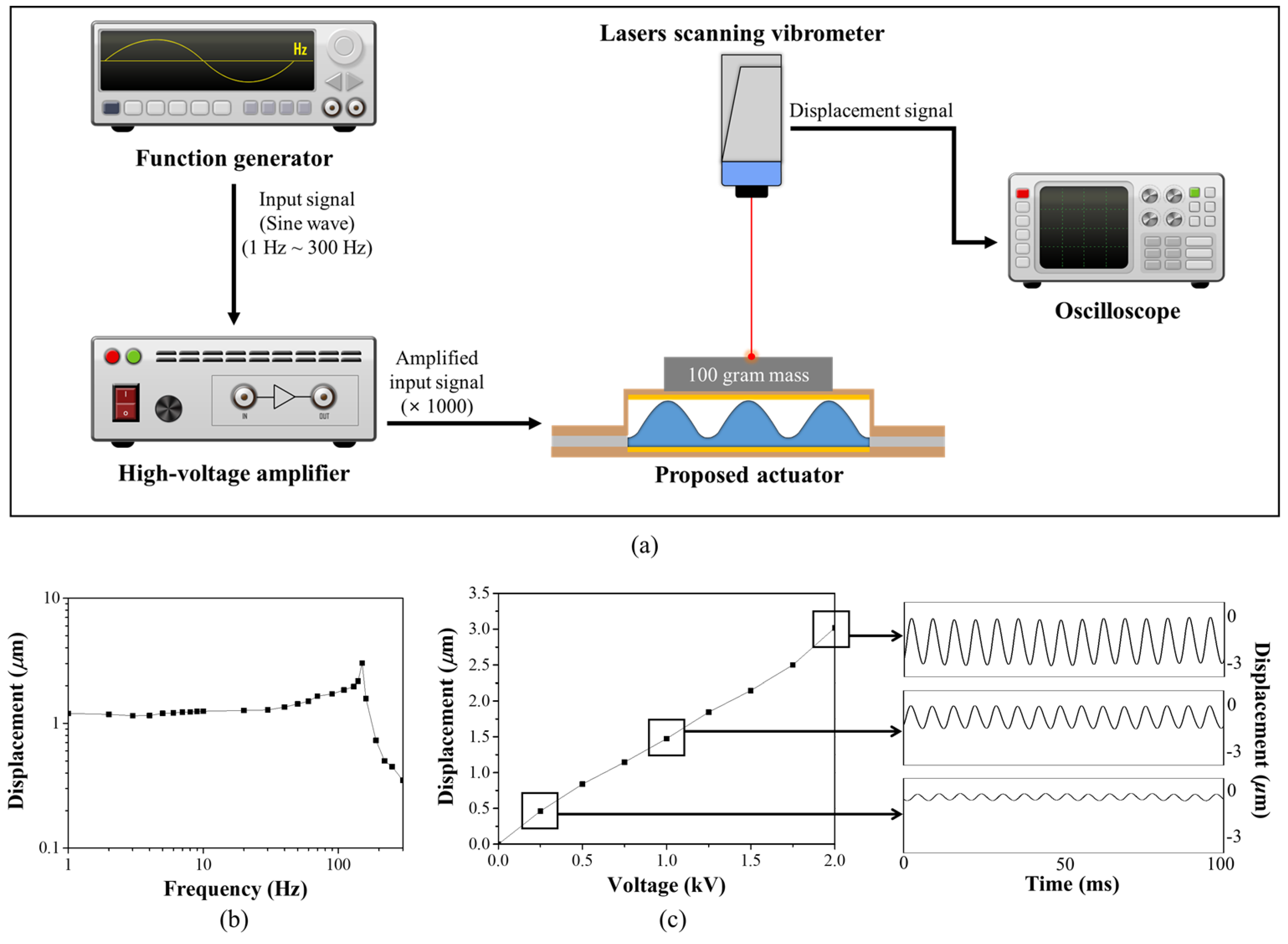
In addition, we measured the displacement of the proposed vibrotactile actuator. The experimental setup is almost the same as the experimental environment for observing vibrational acceleration. The displacement of the proposed actuator was measured by a laser scanning vibrometer (PSV-500, Polytec GmbH, Waldbronn, Germany) as shown in Figure 10a. Based on this experimental environment, we measured the displacement of the actuator as a function of frequency (1~300 Hz) at a fixed amplitude (2 kVpp) (Figure 10b). Furthermore, the displacement was investigated as a function of input voltage (0 to 2.0 kV) at a fixed frequency (150 Hz) (Figure 10c). In Figure 10c, we drew the only maximum displacement of measured vibration. So, we also plotted vibrational displacement when an input voltage is 0.25 kVpp, 1.0 kVpp, and 2.0 kVpp, respectively. The largest displacement (3.02 μm) was observed at the resonance frequency (150 Hz). The result also shows that displacement was controlled by the input voltage.
4. Conclusions
In this paper, we have proposed a thin, highly flexible, and lightweight vibrotactile actuator based on PDMS and Ecoflex, and experimentally optimized it to provide a variety of haptic sensations in real time. The proposed vibrotactile actuator is composed of an upper layer, an adhesive tape layer, a bumpy-shaped dielectric layer, and a lower layer. In this structure, because the electrostatic and elastic forces contribute to the operation of the proposed actuator, the haptic performance of the proposed actuator is improved. To experimentally optimize the proposed actuator, we prepared several dielectric layer samples having different weight ratios of PDMS and Ecoflex, and investigated the mechanical and dielectric properties of the prepared several dielectric layer samples. Furthermore, we fabricated several vibrotactile actuators based on the prepared dielectric layer samples and measured the haptic performance of each actuator. The results show that haptic performance of the proposed actuator keeps getting better as the amount of Ecoflex in the dielectric layer increases. However, as the weight ratio of PDMS to Ecoflex exceeded 1:5, the haptic performance decreased. Therefore, we selected the vibrotactile actuator based on dielecl1:5. To show the reproducibility of the proposed actuator, we fabricated five haptic actuators based on the dielecl1:5 and evaluated their haptic performance. The result shows that the difference in haptic performance of the samples was less than the JND of human tactile perception [21]. Therefore, humans can hardly distinguish the difference in vibration amplitude among actuators. Furthermore, we confirmed that the proposed haptic actuator possesses a fast response time (approximately 18 ms). Due to these reasons, we expect that the proposed haptic actuator will be used as a future tactile feedback module for various smart devices such as a foldable smartphone, a flexible visual display, a rollable infotainment system, etc.
Author Contributions
Conceptualization, Y.H.H.; validation, D.-S.C.; investigation and analysis, D.E.K.; supervision, S.-Y.K.; writing and editing, all authors. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Technology Innovation Program (10077367, Development of a film-type transparent/stretchable 3D touch sensor/haptic actuator combined module and advanced UI/UX) funded by the Ministry of Trade, Industry & Energy (MOTIE, Korea). This work was supported by Institute of Information & communications Technology Planning & Evaluation (IITP) grant funded by the Korea government (MSIT) (No. 2020-0-00594, Morphable Haptic Controller for Manipulating VR·AR Contents). This work was also supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIT) (NRF-2021R1C1C1005677).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within this manuscript.
Acknowledgments
We thank the Cooperative Equipment Center at Koreatech for assistance with the universal testing machine (UTM) experiments.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Rehman, S.U.; Liu, L.; Li, H. Vibrational Soccer: Tactile Rendering of Football Game on Mobile. In Proceedings of the 2007 International Conference on Next Generation Mobile Applications, Services and Technologies (NGMAST 2007), Cardiff, UK, 12–14 September 2007. [Google Scholar] [CrossRef]
- Diaconita, I.; Reinhardt, A.; Christin, D.; Rensing, C. Inferring Smartphone Positions based on Collecting the Environment’s Response to Vibration Motor Actuation. In Proceedings of the 11th ACM Symposium on QoS and Security for Wireless and Mobile Networks, Cancun, Mexico, 2–6 November 2015. [Google Scholar] [CrossRef]
- Yatani, K.; Truong, K.N. Semfeel: A User Interface with Semantic Tactile Feedback for Mobile Touch-screen Devices. In Proceedings of the 22nd Annual ACM Symposium on User Interface Software and Technology, Victoria, BC, Canada, 4–7 October 2009. [Google Scholar] [CrossRef]
- Azenkot, S.; Ladner, R.E.; Wobbrock, J.O. Smartphone Haptic Feedback for Nonvisual Wayfinding. In Proceedings of the 13th International ACM SIGACCESS Conference on Computers and Accessibility, Dundee, UK, 24–26 October 2011. [Google Scholar] [CrossRef]
- Lo, J.; Girouard, A. Bendy: Exploring Mobile Gaming with Flexible Devices. In Proceedings of the Eleventh International Conference on Tangible, Embedded, and Embodied Interaction, Yokohama, Japan, 20–23 March 2017. [Google Scholar] [CrossRef]
- Strohmeier, P.; Burstyn, J.; Carrascal, J.P.; Levesque, V.; Vertegaal, R. Reflex: A Flexible Smartphone with Active Haptic Feedback for Bend Input. In Proceedings of the TEI’16: Tenth International Conference on Tangible, Embedded, and Embodied Interaction, Eindhoven, The Netherlands, 14–17 February 2016. [Google Scholar] [CrossRef]
- Gomes, A.; Priyadarshana, L.L.; Visser, A.; Carrascal, J.P.; Vertegaal, R. Magicscroll: A Rollable Display Device with Flexible Screen Real Estate and Gestural Input. In Proceedings of the 20th International Conference on Human-Computer Interaction with Mobile Devices and Services, Barcelona, Spain, 3–6 September 2018. [Google Scholar] [CrossRef]
- Poncet, P.; Casset, F.; Latour, A.; Santos, F.D.D.; Pawlak, S.; Gwoziecki, R.; Fanget, S. Design and Realization of Electroactive Polymer Actuators for Transparent and Flexible Haptic Feedback Interfaces. In Proceedings of the 2016 17th International Conference on Thermal, Mechanical and Multi-Physics Simulation and Experiments in Microelectronics and Microsystems (EuroSimE), Montpellier, France, 18–20 April 2016. [Google Scholar] [CrossRef]
- Nan, M.; Wang, F.; Kim, S.; Li, H.; Jin, Z.; Bang, D.; Kim, C.-S.; Park, J.-O.; Choi, E. Ecofriendly high-performance ionic soft actuators based on graphene mediated-cellulose acetate. Sens. Actuators B Chem. 2019, 301, 127127. [Google Scholar] [CrossRef]
- Stubning, T.; Denes, I.; Gerhard, R. Tuning electro-mechanical properties of EAP-based haptic actuators by adjusting layer thickness and number of stacked layers—A comparison. Eng. Res. Express 2021, 3, 015015. [Google Scholar] [CrossRef]
- Kurogi, T.; Yonehara, Y.; Sago, G.; Shimada, M.; Fujiwara, T.; Peiris, R.L. Small, Soft, Thin, Lightweight and Flexible Tactile Display Enabling to Provide Multiple Mechanical Stimuli. In Proceedings of the Extended Abstracts of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020. [Google Scholar] [CrossRef]
- Boys, H.; Frediani, G.; Ghilardi, M.; Poslad, S.; Busfiled, J.C.; Carpi, F. Soft Wearable Non-vibratory Tactile Display. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018. [Google Scholar] [CrossRef]
- Ankit; Tiwari, N.; Rajput, M.; Chien, N.A.; Mathews, N. Highly transparent and integrable surface texture change device for localized tactile feedback. Small 2018, 14, 1702312. [Google Scholar] [CrossRef] [PubMed]
- Youn, J.-H.; Mun, H.; Kyung, K.-U. A wearable soft tactile actuator with high output force for fingertip interaction. IEEE Access 2021, 9, 30206–30215. [Google Scholar] [CrossRef]
- Zhao, H.; Hussain, A.M.; Lsrar, A.; Vogt, D.M.; Duduta, M.; Clarke, D.R.; Wood, R.J. A wearable soft haptic communicator based on dielectric elastomer actuators. Soft Robot 2020, 7, 451–461. [Google Scholar] [CrossRef] [PubMed]
- Pyo, D.; Ryu, S.; Kyung, K.-U.; Yun, S.; Kwon, D.-S. High-pressure endurable flexible tactile actuator based on microstructured dielectric elastomer. Appl. Phys. Lett. 2018, 112, 061902. [Google Scholar] [CrossRef] [Green Version]
- Yun, S.; Park, S.; Park, B.; Ryu, S.; Jeong, S.M.; Kyung, K.-U. A soft and transparent visuo-haptic interface pursuing wearable devices. IEEE Trans. Ind. Electron. 2019, 67, 717–724. [Google Scholar] [CrossRef]
- Ji, X.; Liu, X.; Cacucciolo, V.; Civet, Y.; Haitami, A.E.; Cantin, S.; Perriard, Y.; Shea, H. Untethered feel-through haptics using 18-µm thick dielectric elastomer actuators. Adv. Funct. Mater. 2020, 31, 2006639. [Google Scholar] [CrossRef]
- Hajiesmaili, E.; Clarke, D.R. Dielectric elastomer actuators. J. Appl. Phys. 2021, 129, 151102. [Google Scholar] [CrossRef]
- Pelrine, R.; Kornbluh, R.; Pei, Q.; Joseph, J. High-speed electrically actuated elastomers with strain greater than 100%. Science 2000, 287, 836–839. [Google Scholar] [CrossRef] [PubMed]
- Craig, J.C. Difference threshold for intensity of tactile stimuli. Percept. Psychophys. 1972, 11, 150–152. [Google Scholar] [CrossRef] [Green Version]
- Wang, F. Haptic Energy Consumption (SLOA194); Technical Report; Texas Instruments: Dallas, TX, USA, 2014; Available online: https://www.ti.com/lit/an/sloa194/sloa194.pdf (accessed on 15 December 2021).
Figure 1.
Proposed flexible vibrotactile actuator based on dielectric elastomer: (a) overall structure of the proposed actuator and assembled vibrotactile actuator; (b) bottom surface of the upper layer; (c) proposed actuator attached to a foldable smartphone.
Figure 1.
Proposed flexible vibrotactile actuator based on dielectric elastomer: (a) overall structure of the proposed actuator and assembled vibrotactile actuator; (b) bottom surface of the upper layer; (c) proposed actuator attached to a foldable smartphone.

Figure 2.
(a) Fabricated vibrotactile actuator; operating principles of the proposed actuator based on (b,c) a flat-shaped dielectric layer or (d,e) a bumpy-shaped dielectric layer.
Figure 2.
(a) Fabricated vibrotactile actuator; operating principles of the proposed actuator based on (b,c) a flat-shaped dielectric layer or (d,e) a bumpy-shaped dielectric layer.

Figure 3.
Fabricating process of the dielectric layer.

Figure 4.
Experimental environment for investigating the mechanical properties of the dielectric layer samples.
Figure 4.
Experimental environment for investigating the mechanical properties of the dielectric layer samples.

Figure 5.
Mechanical properties of the dielectric layer samples.

Figure 6.
Experimental environment used to investigate the dielectric properties of the dielectric layer samples.
Figure 6.
Experimental environment used to investigate the dielectric properties of the dielectric layer samples.

Figure 7.
Dielectric properties of the dielectric layer samples.

Figure 8.
Experimental setup used to investigate the haptic behavior of the proposed actuator.

Figure 9.
Haptic performance of the proposed actuator: (a) vibration output acceleration of the actuator samples according to input frequency; (b) vibration output acceleration of the actuator samples according to voltage; (c) haptic performance of the prepared five actuators based on dielecl1:5 as a function of input frequency; and (d) haptic performance of the prepared five actuators based on dielecl1:5 as a function of input voltage; (e) discrepancies among the prepared actuators in frequency response; (f) discrepancies among the prepared actuators in voltage response; (g) response time of the proposed actuator based on dielecl1:5.
Figure 9.
Haptic performance of the proposed actuator: (a) vibration output acceleration of the actuator samples according to input frequency; (b) vibration output acceleration of the actuator samples according to voltage; (c) haptic performance of the prepared five actuators based on dielecl1:5 as a function of input frequency; and (d) haptic performance of the prepared five actuators based on dielecl1:5 as a function of input voltage; (e) discrepancies among the prepared actuators in frequency response; (f) discrepancies among the prepared actuators in voltage response; (g) response time of the proposed actuator based on dielecl1:5.

Figure 10.
(a) Experimental environment for investigating the displacement of the proposed actuator; (b) the displacement of the proposed actuator according to the input frequency; and (c) displacement as a function of input voltage at the resonant frequency.
Figure 10.
(a) Experimental environment for investigating the displacement of the proposed actuator; (b) the displacement of the proposed actuator according to the input frequency; and (c) displacement as a function of input voltage at the resonant frequency.

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Heo, Y.H.; Choi, D.-S.; Kim, D.E.; Kim, S.-Y. Flexible Vibrotactile Actuator Based on Dielectric Elastomer for Smart Handheld Devices. Appl. Sci. 2021, 11, 12020. https://0-doi-org.brum.beds.ac.uk/10.3390/app112412020
AMA Style
Heo YH, Choi D-S, Kim DE, Kim S-Y. Flexible Vibrotactile Actuator Based on Dielectric Elastomer for Smart Handheld Devices. Applied Sciences. 2021; 11(24):12020. https://0-doi-org.brum.beds.ac.uk/10.3390/app112412020
Chicago/Turabian StyleHeo, Yong Hae, Dong-Soo Choi, Do Eun Kim, and Sang-Youn Kim. 2021. "Flexible Vibrotactile Actuator Based on Dielectric Elastomer for Smart Handheld Devices" Applied Sciences 11, no. 24: 12020. https://0-doi-org.brum.beds.ac.uk/10.3390/app112412020
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.