High-Speed Elevator Car Air Pressure Compensation Method Based on Coupling Analysis of Internal and External Flow Fields



Abstract
:1. Introduction
2. Air Pressure Compensation Based on IE-FF Coupling Model
2.1. IE-FF Coupling Modeling
- (1)
- Initialization of boundary conditions: initialize the boundary conditions of the IE-FF according to the initial data of the system;
- (2)
- Iterative calculation: According to the initial value, the IE-FF are solved separately, and data exchange is performed; and
- (3)
- End calculation: After the iteration termination condition is met, stop the calculation and obtain the calculation result.
2.2. Air Pressure Compensation System
- (1)
- Fan deflector adjustment control: Air flow adjustment is achieved by installing a deflector with rotatable blades at the inlet of the fan.
- (2)
- Fan speed adjustment control: By changing the fan speed to change the air volume to adjust the air flow.
- (3)
- Pipe network throttle valve adjustment control: By installing a throttle valve at the outlet of the pipe network system to adjust the air volume of the fan.
3. Air Pressure Compensation Algorithm
3.1. ILC Algorithm
3.2. Air Pressure Compensation of Elevator Car Based on PD-ILC
- (1)
- Proportion-Iterative Learning Control (P-ILC) controller:
- (2)
- Differential-Iterative Learning Control (D-ILC) controller:
- (3)
- Proportion Differential-Iterative Learning Control (PD-ILC) controller:
- (4)
- Proportion Integral Differential-Iterative Learning Control (PID-ILC) controller:where , and are, respectively, the constant gain of the proportional, derivative, and integral parts of the learning law.
3.3. A-ILC Algorithm
- (1)
- The partial derivative of with respect to u exists and is continuous;
- (2)
- When , the system satisfies the generalized Lipschitz continuity. That is:where is a constant.
4. Experimental Analyses
4.1. Verification Analysis
4.2. Multi-Factor Coupling Analysis of the Air Pressure Curves
4.3. Development of the Simulation Model
4.4. Results Comparison and Discussion
5. Conclusions
- (1)
- During the operation of the high-speed elevator, the severe air pressure fluctuation outside the car will affect the air pressure inside the car. To realize the accurate compensation of the air pressure inside the car, the IE-FF coupling variation model was established to accurately obtain the transient air pressure change inside the car. Based on this model, the variation amplitude and trend of the air pressure curve inside the car obtained by iterative calculations was consistent with the measurement.
- (2)
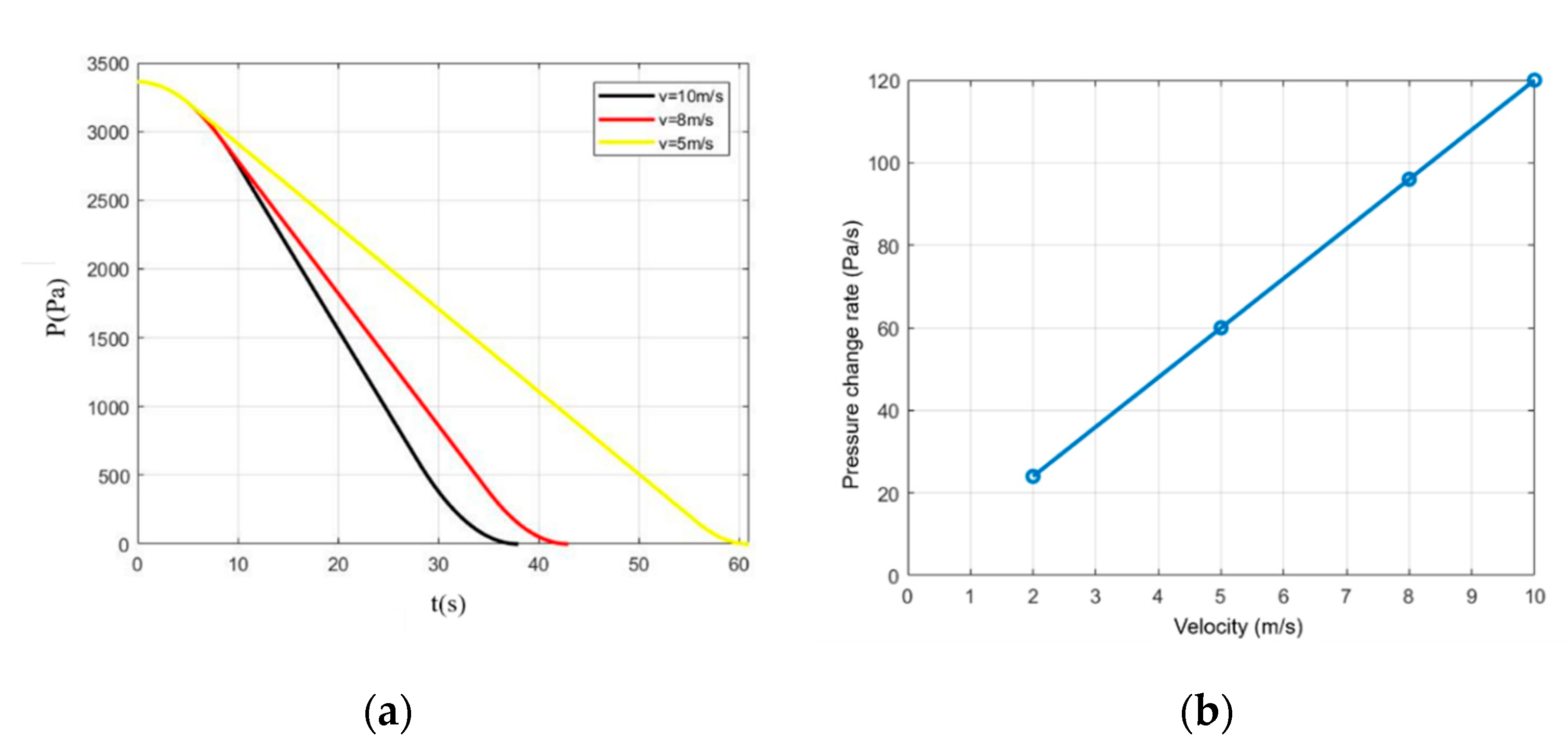
- The influence of different factors on the air pressure inside and outside the car was investigated. Results showed that the maximum running speed, running acceleration and lifting height of the high-speed elevator had a great influence on both the air pressure inside and outside the car. Due to the air leakage gap and the ventilation system, the air pressure change inside the car had a pressure difference effect compared to that outside the car.
- (3)
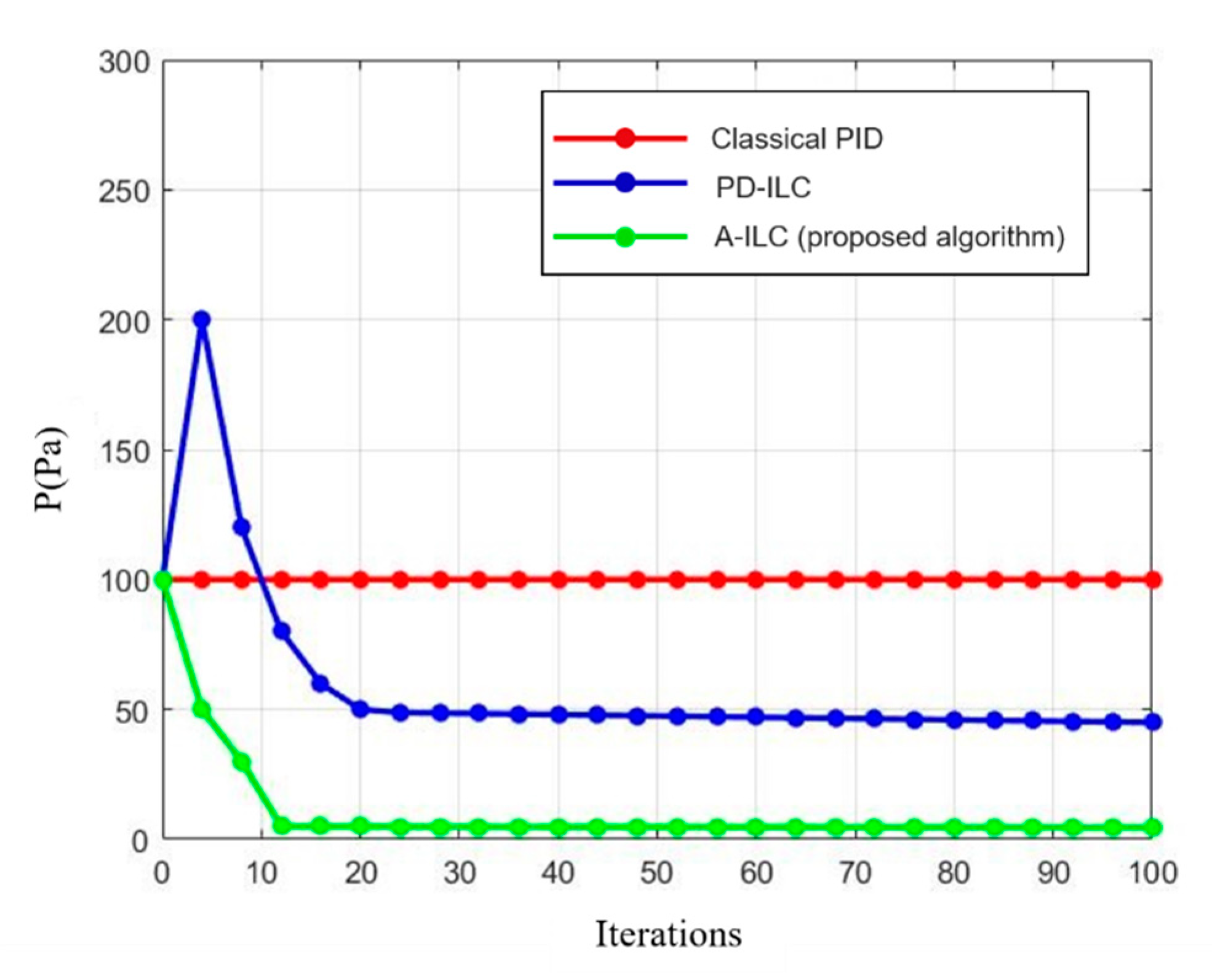
- To verify the effectiveness of the air pressure compensation method, the numerical experiments were carried out through Matlab/Simulink. Taking the KLK2 high-speed elevator as an example, the results showed that the tracking accuracy and convergence speed of the A-ILC algorithm were better than the classical PID algorithm and the ILC algorithm. When the air pressure changed greatly, the air pressure compensation would deviate from the IAPC, and the ILC and A-ILC algorithms would have higher and higher tracking accuracy as the number of iterations increased.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Nomenclature
| IE-FF | Internal and external flow fields |
| IAPC | Ideal air pressure curve |
| N-S equations | Navier-Stokes (N-S) equations |
| RANS equations | Reynolds-averaged Navier-Stokes equations |
| PID | Proportion I Integral Differential |
| ILC | Iterative Learning Control |
| P-ILC | Proportion-Iterative Learning Control |
| D-ILC | Differential-Iterative Learning Control |
| PD-ILC | Proportion Differential-Iterative Learning Control |
| PID-ILC | Proportion Integral Differential-Iterative Learning Control |
| A-ILC | Adaptive iterative learning control |
| Density [] | |
| Static pressure [] | |
| Static temperature [] | |
| Velocity [] | |
| Internal energy [] | |
| Enthalpy [] | |
| Thermal conductivity [] | |
| Dynamic viscosity [] | |
| Scalar components of spatial-coordinates vector | |
| Scalar components of instantaneous fluid velocity | |
| Scalar components of Reynolds-stress tensor | |
| Turbulent kinetic energy [] | |
| Scalar turbulence dissipation rate [] | |
| , , , and | Constants (in standard two-equation k- turbulence model) |
| Turbulent dynamic viscosity [] | |
| Resistance loss coefficient of the pipe | |
| Pipe diameter | |
| Pipe length | |
| Friction coefficient of the pipe | |
| Volume flow rate | |
| Inlet cross-sectional area of the pipe | |
| Outlet cross-sectional area of the pipe | |
| Fluid speed at the inlet of the pipe | |
| Fluid speed at the outlet of the pipe | |
| Total energy per unit mass of fluid | |
| Height between the inlet and outlet of the unit of the pipeline | |
| Gravity acceleration | |
| Node volume flow rate of unit i connected to node n in the pipeline | |
| Total output volume flow rate of node n in the pipeline | |
| Mass flow rate exchanged from outside into inside through the ventilation system at time t | |
| Mass flow rate exchanged from inside into outside through the ventilation system at time t | |
| Mass flow rate of air leakage through the car gap at time t | |
| Air temperature inside the car | |
| Air pressure inside the car | |
| Air volume inside the car | |
| Gas molar mass | |
| Molar gas constant. | |
| Static pressure of the intake fans | |
| Static pressure of the exhaust fans | |
| Volume flow rate of the intake fans | |
| Volume flow rate of the exhaust fans | |
| , , , , , | Fitting coefficient of characteristic curves of the intake and exhaust fans |
| Speed ratio of the intake fans | |
| Speed ratio of the exhaust fans | |
| Speed of the fan | |
| Input frequency of the fan | |
| Number of pole pairs of the fan motor | |
| Indenter of the intake fan | |
| Indenter of the exhaust fan | |
| Resistance coefficient of the ventilation duct connected to the intake fan | |
| Resistance coefficient of the ventilation duct connected to the exhaust fan | |
| Inlet static pressures of the ventilation duct at time t | |
| Outlet static pressures of the ventilation duct at time t | |
| , | Flow coefficients of the fans |
References
- Ding, B.; Zhang, Y.M.; Peng, X.Y.; Li, Q.C.; Tang, H.Y. A hybrid approach for the analysis and prediction of elevator passenger flow in an office building. Autom. Constr. 2013, 35, 69–78. [Google Scholar] [CrossRef]
- Qiu, L.M.; Zhou, H.F.; Wang, Z.L.; Lou, W.Q.; Zhang, S.Y.; Zhang, L.C. A Stepped-Segmentation Method for the High-Speed Theoretical Elevator Car Air Pressure Curve Adjustment. Energies 2020, 13, 2585. [Google Scholar] [CrossRef]
- Duan, Y.; Shen, G.; Zhang, Y.; Su, W. Aerodynamic testing simulation facility for high-speed elevator. J. Beijing Univ. Aeronaut. Astronaut. 2004, 30, 444–447. [Google Scholar]
- Zhu, W.D.; Teppo, L.J. Design and analysis of a scaled model of a high-rise, high-speed elevator. J. Sound Vib. 2003, 264, 707–731. [Google Scholar] [CrossRef]
- Bai, H.L.; Shen, G.X.; So, A. Experimental-based study of the aerodynamics of super-high-speed elevators. Build. Serv. Eng. Res. Technol. 2005, 26, 129–143. [Google Scholar] [CrossRef]
- Matsuda, H. Cause and Modification of the Aerodynamic Noise on High Speed Elevator. J. INCE Jpn. 1994, 18, 32–36. [Google Scholar]
- Matsuda, H.; Fukuyama, Y.; Yokono, Y.; Miyasaku, K. The Effect of Car Configurations on the Flow Around Elevator Models (Oil Flow Pattern and Distribution of Pressure Fluctuation on the Model Wall Surface). In Flow Visualization VI; Tanida, Y., Miyashiro, H., Eds.; Springer: Berlin/Heidelberg, Germany, 1992; pp. 275–279. [Google Scholar]
- Wang, X.B.; Lin, Z.; Tang, P.; Lin, Z.W. Research of the blockage ratio on the aerodynamic performances of high speed elevator. In Proceedings of the 2015 4th International Conference on Mechatronics, Materials, Chemistry and Computer Engineering, Xi’an, China, 12–13 December 2015; Atlantis Press: Xi’an, China, 2015. [Google Scholar]
- Shi, L.Q.; Liu, Y.Z.; Jin, S.Y.; Cao, Z.M. Numerical simulation of unsteady turbulent flow induced by two-dimensional elevator car and counter weight system. J. Hydrodyn. Ser. B 2007, 19, 720–725. [Google Scholar] [CrossRef]
- Mei, D.Q.; Du, X.Q.; Chen, Z. Optimization of dynamic parameters for a traction-type passenger elevator using a dynamic byte coding genetic algorithm. Proc. Inst. Mech. Eng. Part C 2009, 223, 595–605. [Google Scholar] [CrossRef]
- Hara, T. Aerodynamic Force Acting on a High Speed Train at Tunnel Entrance. Bull. JSME 1961, 4, 547–553. [Google Scholar] [CrossRef] [Green Version]
- Vardy, A.E. Generation and alleviation of sonic booms from rail tunnels. Eng. Comput. Mech. 2008, 161, 107–119. [Google Scholar] [CrossRef]
- Sockel, H. Aerodynamic effects caused by a train entering a tunnel. PAMM 2002, 1, 268–269. [Google Scholar] [CrossRef]
- Sockel, H. Formulae for the calculation of pressure effects in railway tunnels. Int. Symp. Aerodyn. Vent. Vehicle Tunn. 2003, 2, 581–595. [Google Scholar]
- Anthoine, J. Alleviation of Pressure Rise from a High-Speed Train Entering a Tunnel. AIAA J. 2009, 47, 2132–2142. [Google Scholar] [CrossRef]
- Biotto, C.; Proverbio, A.; Ajewole, O.; Waterson, N.; Peiro, J. On the treatment of transient area variation in 1D discontinuous Galerkin simulations of train-induced pressure waves in tunnels. Int. J. Numer. Methods Fluids 2013, 71, 151–174. [Google Scholar] [CrossRef]
- Yoon, T.; Lee, S. Efficient prediction methods for the micro-pressure wave from a high-speed train entering a tunnel using the Kirchhoff formulation. J. Acoust. Soc. Am. 2001, 110, 2379–2389. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Klaver, E.C.; Kassies, E. Dimensioning of tunnels for Passenger comfort in Netherlands. In Proceedings of the 10th International Symposium on the Aerodynamics and Ventilation of Vehicle Tunnels, Boston, MA, USA, 1–3 November 2000; BHR Group: Cranfield, UK, 2000; pp. 737–755. [Google Scholar]
- Schwanitz, S.; Wittkowski, M.; Rolny, V.; Basner, M. Pressure variations on a train—Where is the threshold to railway passenger discomfort? Appl. Ergon. 2013, 44, 200–209. [Google Scholar] [CrossRef]
- Schwanitz, S.; Wittkowski, M.; Rolny, V.; Samel, C.; Basner, M. Continuous assessments of pressure comfort on a train—A field-laboratory comparison. Appl. Ergon. 2013, 44, 11–17. [Google Scholar] [CrossRef] [PubMed]
- Sanz-Andrés, A.; Santiago-Prowald, J. Train-induced pressure on pedestrians. J. Wind Eng. Ind. Aerodyn. 2002, 90, 1007–1015. [Google Scholar] [CrossRef] [Green Version]
- Lei, Y.; Ye, Y.; Chen, Z. Horizontal wind effect on the aerodynamic performance of coaxial Tri-Rotor MAV. Appl. Sci. 2020, 10, 8612. [Google Scholar] [CrossRef]
- Yamamoto, K. Elevator Control Device and Elevator Device. Japan Patent 102066223, 18 May 2011. [Google Scholar]
- Yangyou, K.; Shi, W. Control Method of Internal Pressure of Elevator Car. Japan Patent 106081766, 9 November 2016. [Google Scholar]
- Mizuno, S.; Fujita, Y.; Togashi, N.; Kaida, Y. The development of air pressure control system for elevator cage. In Proceedings of the Elevator Escalator and Amusement Rides Conference 2004, Tokyo, Japan, 14–16 June 2004; Volume 2, pp. 21–24. [Google Scholar]
- Zhang, Y.; Su, J.; Chen, M. Research on Adaptive Iterative Learning Control of Air Pressure in Railway Tunnel with IOTs Data. IEEE Access 2020, 8, 5481–5487. [Google Scholar] [CrossRef]
- Hou, X.M.; Zhang, X.J. The Simulation Research on Pressure Control System of the High-Speed Train’s Carriage. Appl. Mech. Mater. 2011, 120, 547–550. [Google Scholar] [CrossRef]
- Li, X.; Chen, C.J. Active-passive control of internal pressure of high-speed train based on fuzzy PID. China Meas. Test 2020, 46, 105–109. [Google Scholar]
- Lumley, J.L. Computational modeling of turbulent flows. Adv. Appl. Mech. 1979, 18, 123–176. [Google Scholar]
- Alfonsi, G. Reynolds-Averaged Navier–Stokes equations for turbulence modeling. Appl. Mech. Rev. 2009, 62, 040802. [Google Scholar] [CrossRef]
- Matsson, J. An Introduction to ANSYS Fluent 2020; SDC Publications: Ulaanbaatar, Mongolia, 2020. [Google Scholar]
- Von Bernuth, R.D. Simple and accurate friction loss equation for plastic pipe. J. Irrig. Drain. E-ASCE 1990, 116, 294–297. [Google Scholar] [CrossRef]
- Bristow, D.A.; Tharayil, M.; Alleyne, A.G. A survey of iterative learning control. IEEE Contr. Syst. Mag. 2006, 26, 96–114. [Google Scholar]
- Owens, D.H.; Hätönen, J. Iterative learning control—An optimization paradigm. Annu. Rev. Control 2005, 29, 57–70. [Google Scholar] [CrossRef]
- Sasa, G. The dynamics of gap flow over idealized topography. Diss. Abstr. Int. 2002, 2, 1233–1244. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Maximum running velocity (mm/s) | |
| Length of hoistway wall (mm) | |
| Width of hoistway wall (mm) | |
| ) | |
| Height of car (mm) | |
| Shape of diversion cover | Semicircle |
| No. Parameter | 1 | 2 | 3 | |
|---|---|---|---|---|
| 7 | 10 | 10 | ||
| 217 | 217 | 110 | ||
| 980.4 | 980.4 | 992.2 | ||
| 0 | 0 | 0 | ||
| 1004.0 | 1004.0 | 1003.3 | ||
| Elevator running total time consuming (s) | 38 | 32 | 22 | |
| Whether there is ear pressing | yes | yes | yes | |
| First ear pressing | 992.8 | 992.9 | 1001.5 | |
| 914.6 | 923.7 | 930.0 | ||
| 3.4 | 3.9 | 3.1 | ||
| Second ear pressing | 1002.1 | 1001.9 | - | |
| 1847.3 | 1823.6 | - | ||
| 3.5 | 4.0 | - | ||
| Parameter | Value |
|---|---|
| 10.0 | |
| 1600 | |
| 3.48 | |
| 2200 | |
| 1100 | |
| 23 | |
| 2100 | |
| 2800 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, L.; Zhou, H.; Wang, Z.; Zhang, S.; Zhang, L.; Lou, W. High-Speed Elevator Car Air Pressure Compensation Method Based on Coupling Analysis of Internal and External Flow Fields. Appl. Sci. 2021, 11, 1700. https://0-doi-org.brum.beds.ac.uk/10.3390/app11041700
Qiu L, Zhou H, Wang Z, Zhang S, Zhang L, Lou W. High-Speed Elevator Car Air Pressure Compensation Method Based on Coupling Analysis of Internal and External Flow Fields. Applied Sciences. 2021; 11(4):1700. https://0-doi-org.brum.beds.ac.uk/10.3390/app11041700
Chicago/Turabian StyleQiu, Lemiao, Huifang Zhou, Zili Wang, Shuyou Zhang, Lichun Zhang, and Wenqian Lou. 2021. "High-Speed Elevator Car Air Pressure Compensation Method Based on Coupling Analysis of Internal and External Flow Fields" Applied Sciences 11, no. 4: 1700. https://0-doi-org.brum.beds.ac.uk/10.3390/app11041700