
Strain Sensitivity Enhancement of Broadband Ultrasonic Signals in Plates Using Spectral Phase Filtering


Abstract
:1. Introduction
2. Theoretical Background
2.1. Strain Effect on Guided Waves
2.2. Strain Monitoring through Cross-Correlation or Time-Reversal Signals
2.3. Fourier and Short-Time Fourier Transforms
3. Filtering Procedure for Synthesis of a New Reference Signal
4. Results and Discussion
4.1. Fourier Transform Filter Implementation
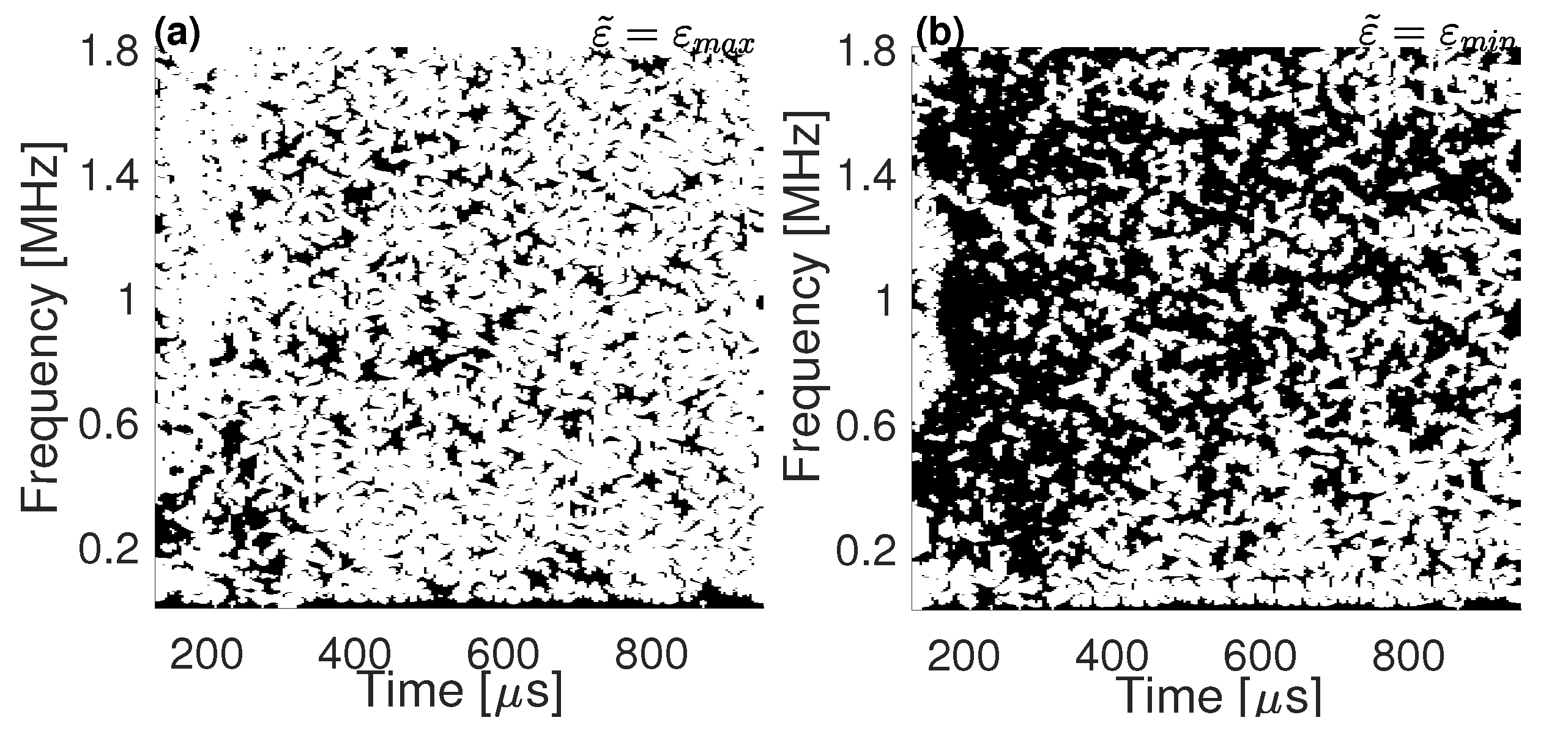
4.2. Short-Time Fourier Transform Implementation
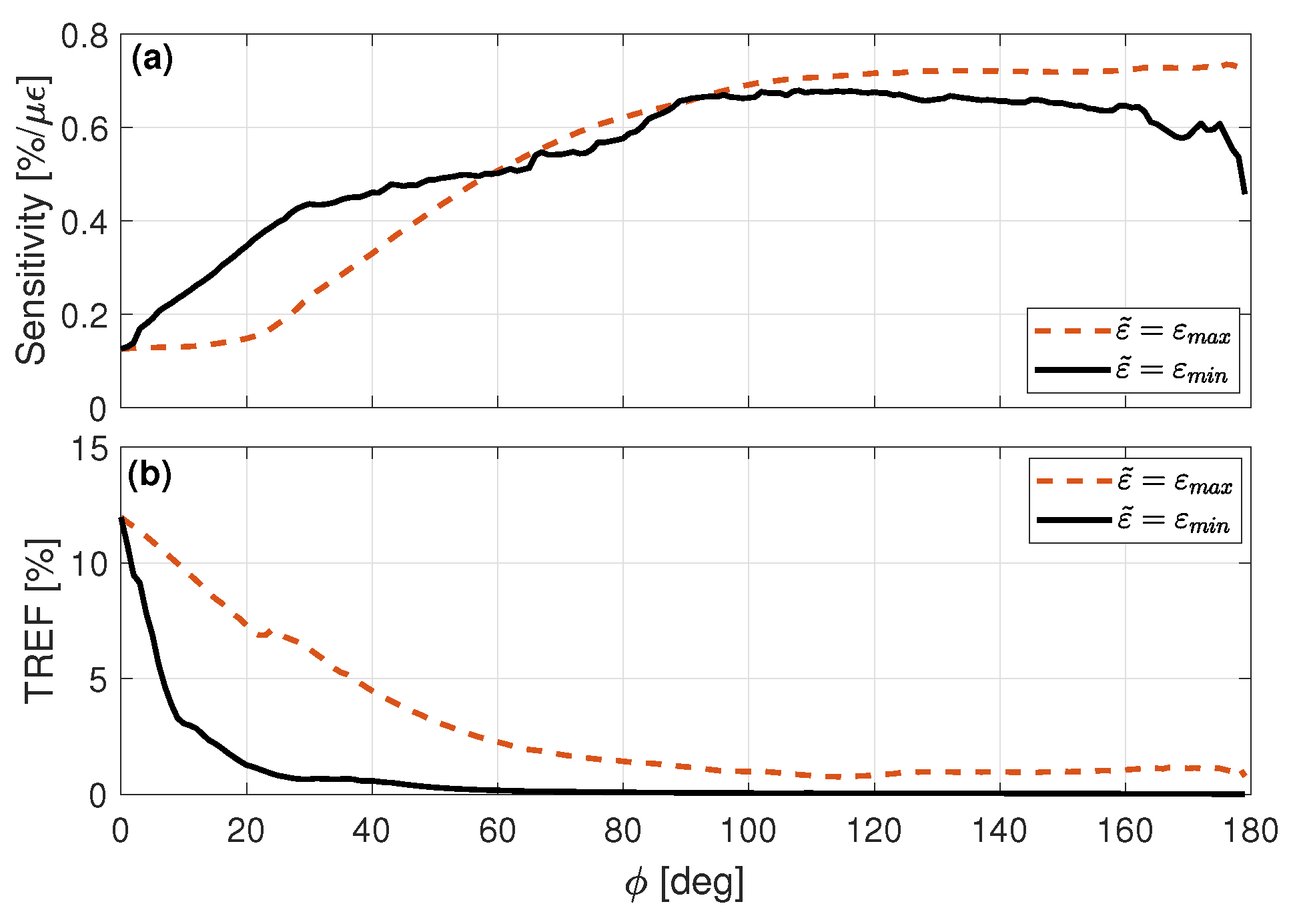
4.3. Dependence on the Reference Strain Level,
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rizzo, P.; Palmer, M.D.; Scalea, F.L. Ultrasonic characterization of steel rods for health monitoring of civil structures. In Smart Structures and Materials 2003: Smart Systems and Nondestructive Evaluation for Civil Infrastructures; International Society for Optics and Photonics: Bellingham, DC, USA, 2003; Volume 5057, pp. 75–84. [Google Scholar]
- Xu, J.; Yang, D.; Qin, C.; Jiang, Y.; Sheng, L.; Jia, X.; Bai, Y.; Shen, X.; Wang, H.; Deng, X.; et al. Study and Test of a New Bundle-Structure Riser Stress Monitoring Sensor Based on FBG. Sensors 2015, 15, 29648–29660. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Michaels, J.; Michaels, T.; Martin, R. Analysis of global ultrasonic sensor data from a full scale wing panel test. In AIP Conference Proceedings; American Institute of Physics: College Park, MD, USA, 2009; Volume 1096, pp. 950–957. [Google Scholar]
- Mishakin, V.V.; Dixon, S.; Potter, M.D.G. The use of wide band ultrasonic signals to estimate the stress condition of materials. J. Phys. Appl. Phys. 2006, 39, 4681–4687. [Google Scholar] [CrossRef]
- Hughes, D.; Kelly, J. Second-order elastic deformation of solids. J. Appl. Phys. Rev. 1953, 92, 1145–1149. [Google Scholar] [CrossRef]
- Pao, Y.; Sachse, W.; Fukuoka, H. Acoustoelasticity and ultrasonic measurements of residual stresses. Phys. Acoust. 1984, 17, 61–143. [Google Scholar]
- Mitra, M.; Gopalakrishnan, S. Guided wave based structural health monitoring: A review. Smart Mater. Struct. 2016, 25, 1–27. [Google Scholar] [CrossRef]
- Gandhi, N.; Michaels, J.E.; Lee, S.S. Acoustoelatic lamb wave propagation in biaxially stressed plates. J. Acoust. Soc. Am. 2012, 132, 1284–1293. [Google Scholar] [CrossRef] [Green Version]
- Pei, N.; Bond, L.J. Higher order acoustoelastic Lamb wave propagation in stressed plates. J. Acoust. Soc. Am. 2016, 140, 3834–3843. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kubrusly, A.C.; Braga, A.; von der Weid, J.P. Derivation of acoustoelastic lamb wave dispersion curves in anisotropic plates at the initial and natural frames of reference. J. Acoust. Soc. Am. 2016, 140, 2412–2417. [Google Scholar] [CrossRef]
- Peddeti, K.; Santhanam, S. Dispersion curves for Lamb wave propagation in prestressed plates using a semi-analytical finite element analysis. J. Acoust. Soc. Am. 2018, 143, 829–840. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Ng, C.T.; Mohabuth, M.; Kotousov, A. Finite element prediction of acoustoelastic effect associated with Lamb wave propagation in pre-stressed plates. Smart Mater. Struct. 2019, 28, 095007. [Google Scholar] [CrossRef] [Green Version]
- Zuo, P.; Yu, X.; Fan, Z. Acoustoelastic guided waves in waveguides with arbitrary prestress. J. Sound Vib. 2020, 469, 115113. [Google Scholar] [CrossRef]
- Shi, F.; Michaels, J.E.; Lee, S.J. In situ estimation of applied biaxial loads with lamb waves. J. Acoust. Soc. Am. 2013, 133, 677–687. [Google Scholar] [CrossRef] [Green Version]
- Pei, N.; Bond, L.J. Comparison of acoustoelastic Lamb wave propagation in stressed plates for different measurement orientations. J. Acoust. Soc. Am. 2017, 142, 327–331. [Google Scholar] [CrossRef] [Green Version]
- Mal, Y.; Yang, Z.; Zhang, J.; Liu, K.; Wu, Z.; Ma, S. Axial stress monitoring strategy in arbitrary cross-section based on acoustoelastic guided waves using PZT sensors. J. AIP Adv. 2019, 9, 125304. [Google Scholar]
- Rucka, M.; Zima, B.; Kędra, R. Application of Guided Wave Propagation in Diagnostics of Steel Bridge Components. Archiv. Civ. Eng. 2014, 60, 493–515. [Google Scholar] [CrossRef] [Green Version]
- Shkerdin, G.; Glorieux, C. Lamb mode conversion in a plate with a delamination. J. Acoust. Soc. Am. 2004, 116, 2089–2100. [Google Scholar] [CrossRef]
- Kubrusly, A.C.; von der Weid, J.P.; Dixon, S. Experimental and numerical investigation of the interaction of the first four SH guided wave modes with symmetric and non-symmetric discontinuities in plates. NDT E Int. 2019, 108, 102175. [Google Scholar] [CrossRef]
- Ing, R.K.; Fink, M. Time-reversed lamb waves. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1998, 45, 1032–1043. [Google Scholar] [CrossRef] [PubMed]
- Park, H.W.; Sohn, H.; Law, K.H.; Farrard, C.R. Time reversal active sensing for health monitoring of a composite plate. J. Sound Vib. 2007, 302, 50–66. [Google Scholar] [CrossRef]
- Gangadharan, R.; Murthy, C.; Gopalakrishnan, S.; Bhat, M. Time reversal technique for health monitoring of metallic structure using lamb waves. Ultrasonics 2009, 49, 696–705. [Google Scholar] [CrossRef] [PubMed]
- Harley, J.; O’Donoughue, N.; Jin, Y.; Moura, J.M.F. Time Reversal Focusing for Pipeline Structural Health Monitoring. In Proceedings of Meetings on Acoustics 158ASA; Acoustical Society of America: Melville, NY, USA, 2009; Volume 8, p. 1. [Google Scholar]
- Watkins, R.; Jha, R. A modified time reversal method for Lamb wave based diagnostics of composite structures. Mech. Syst. Signal Process. 2012, 31, 345–354. [Google Scholar] [CrossRef]
- Agrahari, J.K.; Kapuria, S. A refined Lamb wave time-reversal method with enhanced sensitivity for damage detection in isotropic plates. J. Intell. Mater. Syst. Struct. 2015, 27, 1283–1305. [Google Scholar] [CrossRef]
- Zeng, L.; Lin, J.; Huang, L. A Modified Lamb Wave Time-Reversal Method for Health Monitoring of Composite Structures. Sensors 2017, 17, 955. [Google Scholar] [CrossRef] [Green Version]
- Kubrusly, A.C.; Pérez, N.; Oliveira, T.F.; Adamowski, J.C.; Braga, A.M.B.; von de Weid, J.P. Mechanical Strain Sensing by Broadband Time Reversal in Plates. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2016, 63, 746–756. [Google Scholar] [CrossRef] [PubMed]
- Spalvier, A.; Cetrangolo, G.; Martinho, L.; Kubrusly, A.; Blasina, F.; Pérez, N. Monitoring of compressive stress changes in concrete pillars using cross correlation. In Proceedings of the IEEE International Ultrasonics Symposium (IUS), Glasgow, UK, 6–9 October 2019; pp. 2465–2468. [Google Scholar]
- Quiroga, J.; Mujica, L.; Villamizar, R.; Ruiz, M.; Camacho, J. PCA based stress monitoring of cylindrical specimens using pzts and guided waves. Sensors 2017, 17, 2788. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kwun, H.; Bartels, K.A. Experimental observation of wave dispersion in cylindrical shells via time-frequency analysis. J. Acoust. Soc. Am. 1995, 97, 3905–3907. [Google Scholar] [CrossRef]
- Prosser, W.H.; Seale, M.D.; Smith, B.T. Time–frequency analysis of the dispersion of lamb modes. J. Acoust. Soc. Am. 1999, 105, 2669–2676. [Google Scholar] [CrossRef] [Green Version]
- Niethammer, M.; Jacobs, L.J.; Qu, J.; Jarzynski, J. Time-frequency representation of Lamb waves using the reassigned spectrogram. J. Acoust. Soc. Am. 2000, 107, 19–24. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jeong, H.; Jang, Y.S. Wavelet analysis of plate wave propagation in composite laminates. Compos. Struct. 2000, 49, 443–450. [Google Scholar] [CrossRef]
- Chen, J.; Rostami, J.; Tse, P.W.; Wan, X. The design of a novel mother wavelet that is tailor-made for continuous wavelet transform in extracting defect-related features from reflected guided wave signals. Measurement 2017, 110, 176–191. [Google Scholar] [CrossRef]
- Wu, J.; Ma, Z.; Zhang, Y. A Time-Frequency Research for Ultrasonic Guided Wave Generated from the Debonding Based on a Novel Time-Frequency Analysis Technique. Shock. Vib. 2017, 2017, 5686984. [Google Scholar] [CrossRef] [Green Version]
- Siqueira, M.; Gatts, C.; Silva, R.d.; Rebello, J. The use of ultrasonic guided waves and wavelets analysis in pipe inspection. Ultrasonics 2004, 41, 785–797. [Google Scholar] [CrossRef]
- Liu, Y.; Li, Z.; Gong, K. Detection of a radial crack in annular structures using guided circumferential waves and continuous wavelet transform. Mech. Syst. Signal Process. 2012, 30, 157–167. [Google Scholar] [CrossRef]
- Martinho, L.M.; Kubrusly, A.C.; Pérez, N.; Braga, A.M.B.; von der Weid, J.P. Strain sensitivity enhancement of ultrasonic waves in plates using phase filter. In Proceedings of the IEEE International Ultrasonics Symposium (IUS), Glasgow, UK, 6–9 October 2019; pp. 928–931. [Google Scholar]
- Rose, J.L. Ultrasonic Guided Waves in Solid Media; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Zhivomirov, H. On the Development of STFT-analysis and ISTFT-synthesis Routines and their Practical Implementation. TEM J. 2019, 8, 56–94. [Google Scholar]
- Dodson, J.C.; Inman, D.J. Thermal sensitivity of Lamb waves for structural health monitoring applications. Ultrasonics 2013, 53, 677–685. [Google Scholar] [CrossRef]
- Lee, S.J.; Gandhi, N.; Michaels, J.E.; Michaels, T.E. Comparison of the Effects of Applied Loads and Temperature Variations on Guided Wave Propagation. In AIP Conference Proceedings; American Institute of Physics: College Park, MD, USA, 2011; Volume 1335, pp. 175–182. [Google Scholar]
- Bowen, L.; Gentilman, R.; Pham, H.; Serwatka, W.; Fiore, D. Development of 1–3 and 2–2 piezocomposite transducers. J. Acoust. Soc. Am. 1994, 96, 3299. [Google Scholar] [CrossRef] [Green Version]
- Ferroperm™ Data Sheets from Meggitt Denmar, Meggit Ferroperm. Available online: https://www.meggittferroperm.com/resources/data-sheets/ (accessed on 29 December 2020).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
(deg.) | FT—Filtering | STFT—Filtering | ||||
|---|---|---|---|---|---|---|
| TREF (%) | Peak Sensitivity | TREF (%) | Peak Sensitivity | |||
| Mean (%/) | Std. (%/) | Mean (%/) | Std. (%/) | |||
| 11.96 | 0.1261 | 0.0009 | 11.96 | 0.1261 | 0.0009 | |
| 7.67 | 0.1345 | 0.0011 | 8.46 | 0.1369 | 0.0010 | |
| 4.69 | 0.1635 | 0.0016 | 6.28 | 0.2363 | 0.0020 | |
| 2.11 | 0.5064 | 0.0044 | 2.26 | 0.5074 | 0.0048 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martinho, L.M.; Kubrusly, A.C.; Pérez, N.; von der Weid, J.P. Strain Sensitivity Enhancement of Broadband Ultrasonic Signals in Plates Using Spectral Phase Filtering. Appl. Sci. 2021, 11, 2582. https://0-doi-org.brum.beds.ac.uk/10.3390/app11062582
Martinho LM, Kubrusly AC, Pérez N, von der Weid JP. Strain Sensitivity Enhancement of Broadband Ultrasonic Signals in Plates Using Spectral Phase Filtering. Applied Sciences. 2021; 11(6):2582. https://0-doi-org.brum.beds.ac.uk/10.3390/app11062582
Chicago/Turabian StyleMartinho, Lucas M., Alan C. Kubrusly, Nicolás Pérez, and Jean Pierre von der Weid. 2021. "Strain Sensitivity Enhancement of Broadband Ultrasonic Signals in Plates Using Spectral Phase Filtering" Applied Sciences 11, no. 6: 2582. https://0-doi-org.brum.beds.ac.uk/10.3390/app11062582