
Translating Videos into Synthetic Training Data for Wearable Sensor-Based Activity Recognition Systems Using Residual Deep Convolutional Networks

Abstract
:1. Introduction and Related Work
1.1. Paper Contributions
- We have adapted the method to generalise outside the target exercises. Our model can now be trained on other subjects performing a set of “generic” motions selected to be representative of a broad domain. Using this generic regression model, we can generate synthetic training data for a variety of different activities.
- We have performed and described an in depth analysis of the physical background of deriving different components of the IMU signal and have shown how to simulate different sensor signals beyond acceleration norm.
- We have performed an analysis of the influence of various signal processing techniques on the quality of the simulated sensor signal.
- We have proposed and implemented a new deep neural network based regression model for the generation of simulated sensor data from videos. Compared to our previous work, we now have one regression network per sensor position, which helped reduce overfitting the training motions.
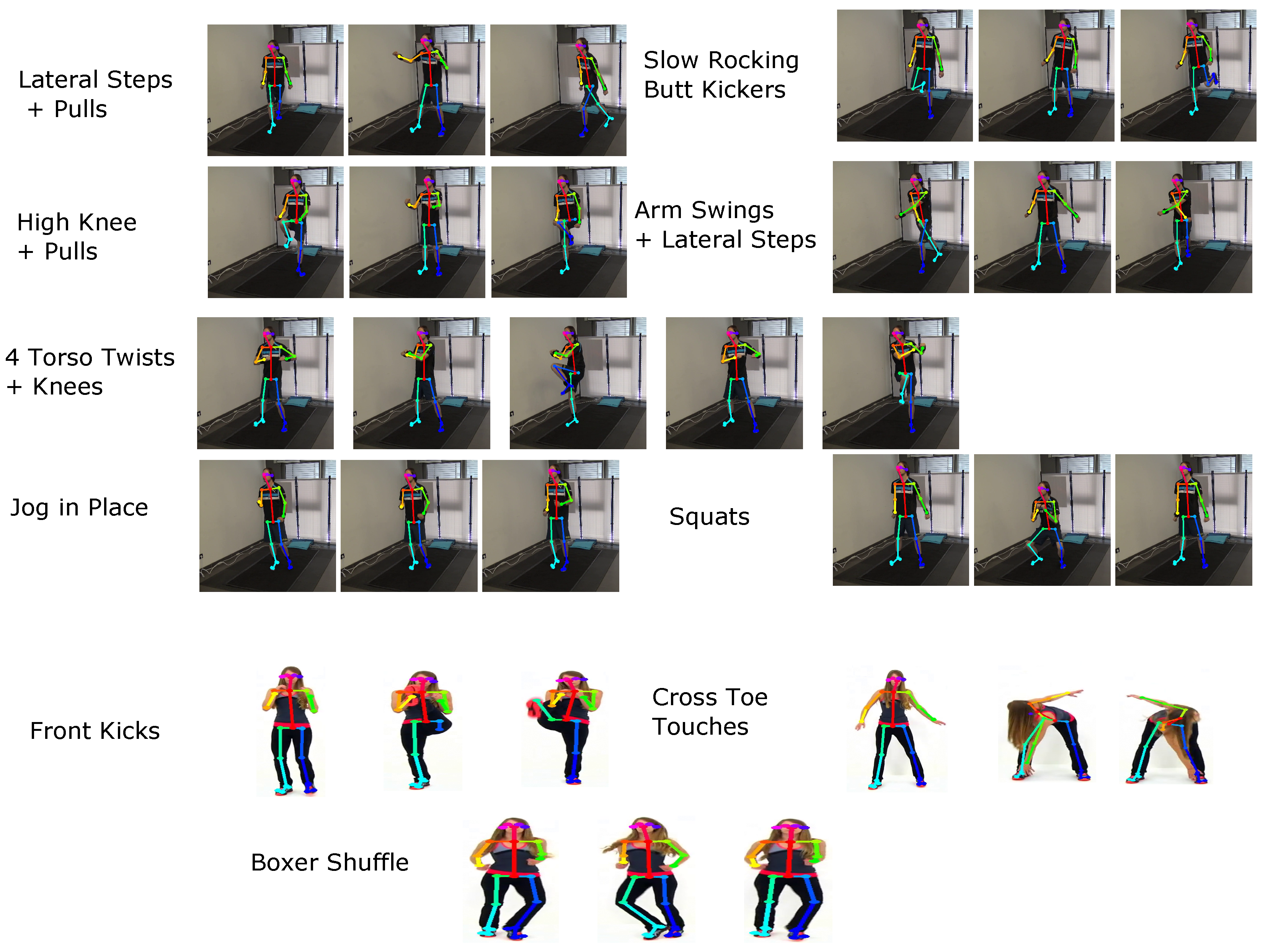
- We have identified a set of generic motions suitable for training the regression model for the broad domain of aerobics like physical exercises, recorded a dataset containing appropriate video footage and sensor data and used it to train the above model.
- We have performed an evaluation on an activity recognition task from the above broad domain of aerobic like exercises for which we have also recorded our own dataset. We have both collected and used as source of simulated training data appropriate online videos. Our analysis includes testing the influence of simulating different sensor modalities and adding small amounts of real sensor data to the simulated one to further improve accuracy. Compared to our previous preliminary work [14], we achieve significantly better results, although the problem that we tackle (using generic motions for training the regression model) is a harder one. Overall we show that
- (a)
- Systems trained on simulated data generated by our regression model and tested on real sensor data can achieve a recognition performance that is within 10% of the recognition performance achieved by a model trained on the corresponding real sensor data.
- (b)
- By increasing the amount of simulated data, we can match the performance of a real signal based model trained on less data. Results so far indicate about a factor of 2 to be needed. This is in line with the motivation behind this work, which is the fact that a very large amount of videos are available for many relevant activities online, which in turn means that we can get much more training data if we can generate it from such videos (which we aim to enable).
- (c)
- Adding even small amounts of real sensor data to fine tune the model generated on the basis of simulated data can improve the performance significantly. In our experiments we found that real data from only 1 or 2 real users can already make the performance of a system trained on simulated data comparable to one fully trained on real data.
1.2. Related Work
- Simulation of IMU data directly from virtual environments (see Section 1.2.1).
- Generation of 3D animations from 2D monocular videos (see Section 1.2.2).
- Machine learning (ML) methods for generating signal variations such as Generative Adversarial Networks (GANs) (see Section 1.2.3).
- ML methods for predicting signal values in physical systems (see Section 1.2.4).
1.2.1. Simulating IMU Data Directly from 3D Trajectories in Virtual Environments
1.2.2. Obtaining 3D Poses from Videos
1.2.3. Deep Learning Based Generation of Signal Variations
1.2.4. Deep Learning Methods for the Prediction of Physical Parameters
1.2.5. Overall Positioning with Respect to State of the Art
2. Problem Description and Design Considerations
- Fundamental incompleteness of 2D video information. Monocular video (which is what we need to work with to be able to harvest online video sources) does not contain complete 6-DOF information about objects (in our case human body parts) that it shows. Instead for each object a single video frame provides 2D coordinates in its own frame of reference which are essentially the x- and y-coordinates in pixels. When looking at such a frame humans can translate such 2D image coordinates into information about physical coordinates (which in some cases may include all 6 DOFs) through semantic analysis of the picture and putting the results of such semantic analysis in the context of their understanding of the world. Thus when seeing a man waving his arms, we can estimate the physical coordinates of various body parts with respect to each other just from our knowledge of human physiology (degrees of freedom of joints, typical motions typical size and proportions of human body etc.). Clearly not knowing the exact dimensions of the specific person, this can only be an approximation.
- Inherent inaccuracies in 2D video information. Even when physical coordinates of relevant body parts can in principle be inferred from the semantic information, the achievable accuracy can vary greatly depending on the camera angle and position. Thus, for example, given frontal view of the user (as for example in Figure 2 the x-y position of the wrist, which is point 4 in Figure 3) in respect to the hip (point 8) can be estimated with reasonable accuracy. On the other hand, the angle of rotation of the wrist around the lower arm axis is much more difficult to estimate accurately. This is because in a typical video, the wrist itself can be just a few pixels wide.
- Sensor specific physical effects. Sensor signals are influenced by factors which do not directly manifest themselves in an image. Best example of this is gravity. While the direction of “down” can mostly be inferred from semantic analysis of an image, it is not always enough. Consider the example of the wrist rotation above in the context of a wrist worn acceleration sensor. If the lower arm is parallel to the ground then the rotation determines how the gravity vector is projected onto the sensor axis perpendicular to the lower arm. Thus, the rotation has a very significant influence on the value of the acceleration signals on those two axes. On the other hand, as described above, wrist rotation tends to produce a “weak signal” in an image so that it can only be roughly estimated. Another example is high frequency “ringing” of the acceleration signals, when for example the user stamps his feet on the ground. This results from high frequency vibration of the device caused by the strong impact of the foot on a hard surface and is a very characteristic feature in the acceleration signals, but mostly invisible on the video signal as the amplitude of the vibration is too small and affects the device only (not body parts as a whole) which may be invisible (e.g., hidden under clothing).
- Frame of reference and scaling. IMUs typically use the “world” coordinate system which relies on magnetic sensors to determine geographic north and derives the direction of the gravity vector as down. The signals are given in standard units (e.g., for acceleration). In principle gravity can be derived through semantic analysis of an image, which is however not necessarily trivial and not always reliable. Obviously in most images "north" is not given. All motions are given in pixels per frame with the relationship between pixels and physical units depending on the camera position and settings. Overall the translation between the image frame of reference and pixel units and the sensor frame of reference and physical units is a non trivial challenge, even more in videos obtained from online repositories where cameras are not calibrated.
3. Method
- Optional: low pass filtering.
- A sliding window based translation of the raw 2D pixel coordinates into appropriately filtered and scaled values in the body centered (hip as origin) frame of reference. This window considers s in the past and in the future, with a total length of 3 s.
- Generating sliding windows of the pre-processed pose data with window size W and step S.
3.1. Obtaining 2D Poses
3.1.1. Pose Translation and Processing
3.1.2. Additional Signal Processing and Selection
3.2. Regression Models
- Providing information about the motion of body parts that we know, from physical consideration, to be irrelevant for the signal of a given sensor at a given location will “confuse” the model. Eventually, given enough data, good models will likely learn to distinguish relevant from irrelevant information. However, getting rid of confusing information is known to significantly reduce the amount of required training data and speed up training.
- Providing information about body parts that, from a bio-mechanical point of view do not influence each other, on the other hand can be counterproductive and lead to overfitting the specific training motion sequences and combinations. As an example, consider the motion of the left and right wrist. With the exception of some very extreme motions (e.g., extremely strong shaking of one wrist making the whole body shake), the motion of one wrist has no influence on the other. However, in many motion sequences there are sometimes strong correlations between the motion of both wrists. The best example is walking when people often swing their arms in sync. When training the system to recognize walking, we want the system to learn such correlations. However, when training a regression that should map motions in an image onto sensor data for arbitrary activities based on physical constraints only this would be undesirable overfitting of artefacts of the specific training sequence.
- Finally there is the question if a joint model should be trained for all sensor signals, if separate models should be trained for all signals from one on-body location or if we should train a separate model for each signal at each location. Training one model for all locations and signals is not advisable due to the need of avoiding overfitting a specific training set because of spurious correlations between signals from different locations. In principle, training a model to generate all the signals from a given body location should allow it to capture the physical dependencies between those signals and should thus improve the quality of the results. However, in our experiments we have found individual models trained for each sensor modality at each location to perform best. This may be due to insufficient training data. It may also be necessary to introduce onto the model mechanisms for explicitly encoding physical boundary conditions as proposed, e.g., by the concept of Physically Informed Neural Networks [45].
3.3. Datasets for Training the Regression
4. Evaluation
4.1. Data Collection for Activity Recognition Based Evaluation
4.2. Evaluation Procedure
- The real IMU data from our training users in the Drill dataset. This is the “gold standard”. Systems trained with this data should perform best.
- Simulated IMU data generated from the videos of our training users in the Drill dataset. Here the system trained on data generated from video is trained on exactly the same users and activity instances as the baseline system ensuring the “fairest” and most consistent comparison.
- IMU data generated from the 12 YouTube videos.
- What is the effect of different pre-processing techniques described in Section 3.1 on the performance difference between a system trained on the real sensor data and one trained on data generated from video using our approach? In this context it is important to also consider the effect of the respective techniques on the absolute performance of the baseline system. Thus, we do not want to consider techniques that may reduce the difference between simulated and real sensor data based systems at the price of making both systems significantly worse.
- How well does our approach perform for different types of sensor signals (see Section 2) ? Again we need to consider not only how the different sensor choices affect the difference between simulated and real sensor data but also how they impact the absolute performance.
- Can we compensate for potentially inferior quality of the training data generated from videos by providing a larger amount of training data? Given that our approach gives the user access to huge amounts of data contained in online videos (much more than can realistically be collected as labeled data with on-body sensors), it is not necessary to match the performance of real sensor data in tests on the same sized training sets (as done with respect to points 1 and 2 above). Instead we need to investigate what happens when we provide the system, using simulated sensor data, with more training examples than the real sensor data based system.
- Can the quality of training based on simulated sensor data generated from videos be improved by combining it with a small amount of real sensor data? The question is if small amounts of real sensor data, that can be easily collected, can “fine-tune” HAR systems trained on large amounts of simulated data to improve their performance.
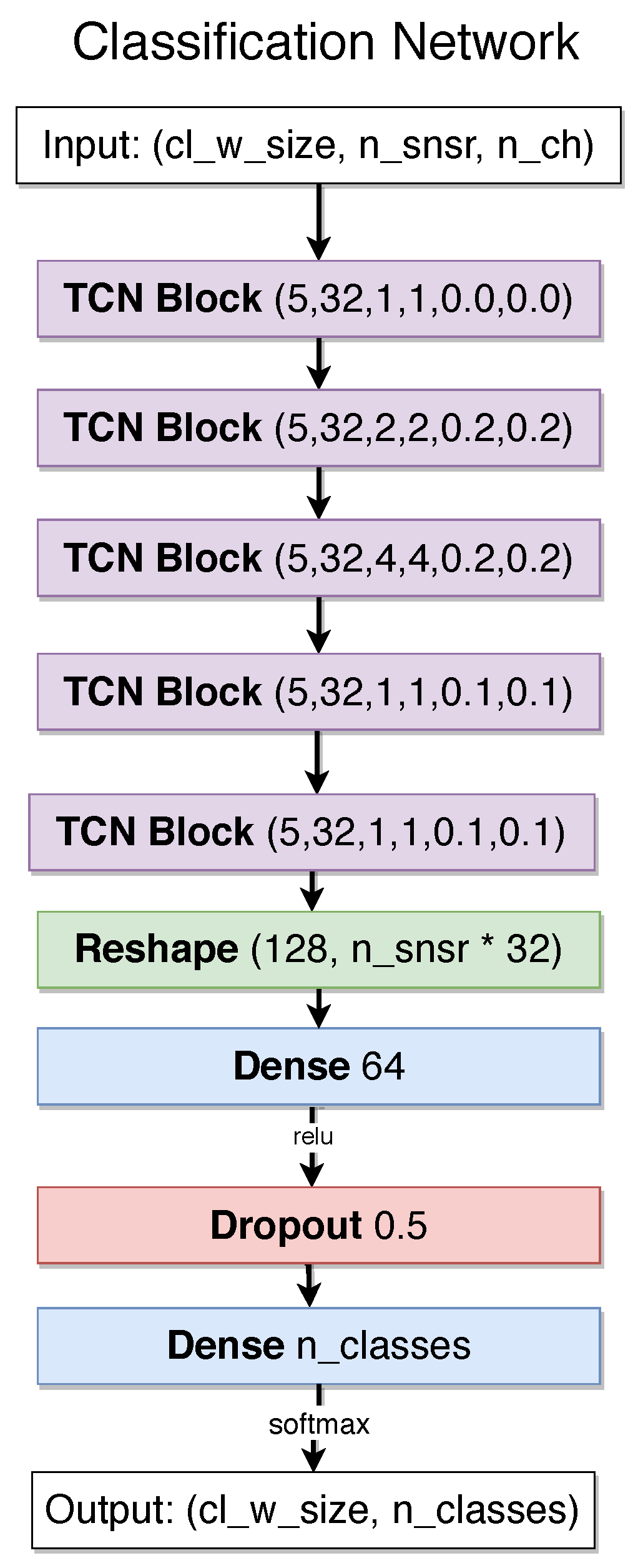
4.3. Recognition Approach
5. Results
5.1. Signal Level Evaluation
- Overall the simulated signal has the same trends and large scale features as the original signal.
- Many of the smaller features such as distinct peaks are also matched by the simulated signal. However, some are missed or have a much smaller amplitude in the simulated signal.
- The main difference between the simulated and the real signal is in the amplitude. In most cases the simulated amplitude is smaller, but not by a constant factor that could be overcome with simple scaling. The underestimation is particularly pronounced for high frequency peaks. This can be explained by a number of factors. First of all high frequency components (“details”) tend to be in general more difficult to reproduce and given the limited size of our training set, some limitations in this area are not surprising. Second, in particular for the acceleration sensors, some of the peaks are due to physical effects which are not present or very difficult to capture in the video (e.g., high frequency “ringing” after sudden impact, see Section 2).
- Especially in the acceleration signals there is a “baseline shift”-like effect (especially visible in the third row of Figure 7). At times the system seems to completely ignore parts that are below a baseline situated just below 10 (corresponding to around 1 g). This can be attributed to downward motions where the earth gravity is subtracted from the acceleration. Thus a free falling object (accelerating downwards with 1 g) experiences no acceleration force (is weightless). This means that the acceleration norm is smaller than 1 g (actually 0 in free fall), at least as experienced by the real sensor. For all other motions on the other hand, the value of the acceleration is always equal to or above, at least in the norm, 1 g. Given the limited size of the training set for the regression model and the fact that we did not include any semantic analysis to detect the “down” direction it is not surprising that our model struggles to capture this phenomenon. One way of dealing with the problem is to use linear acceleration which can be derived by IMUs, which is discussed below.
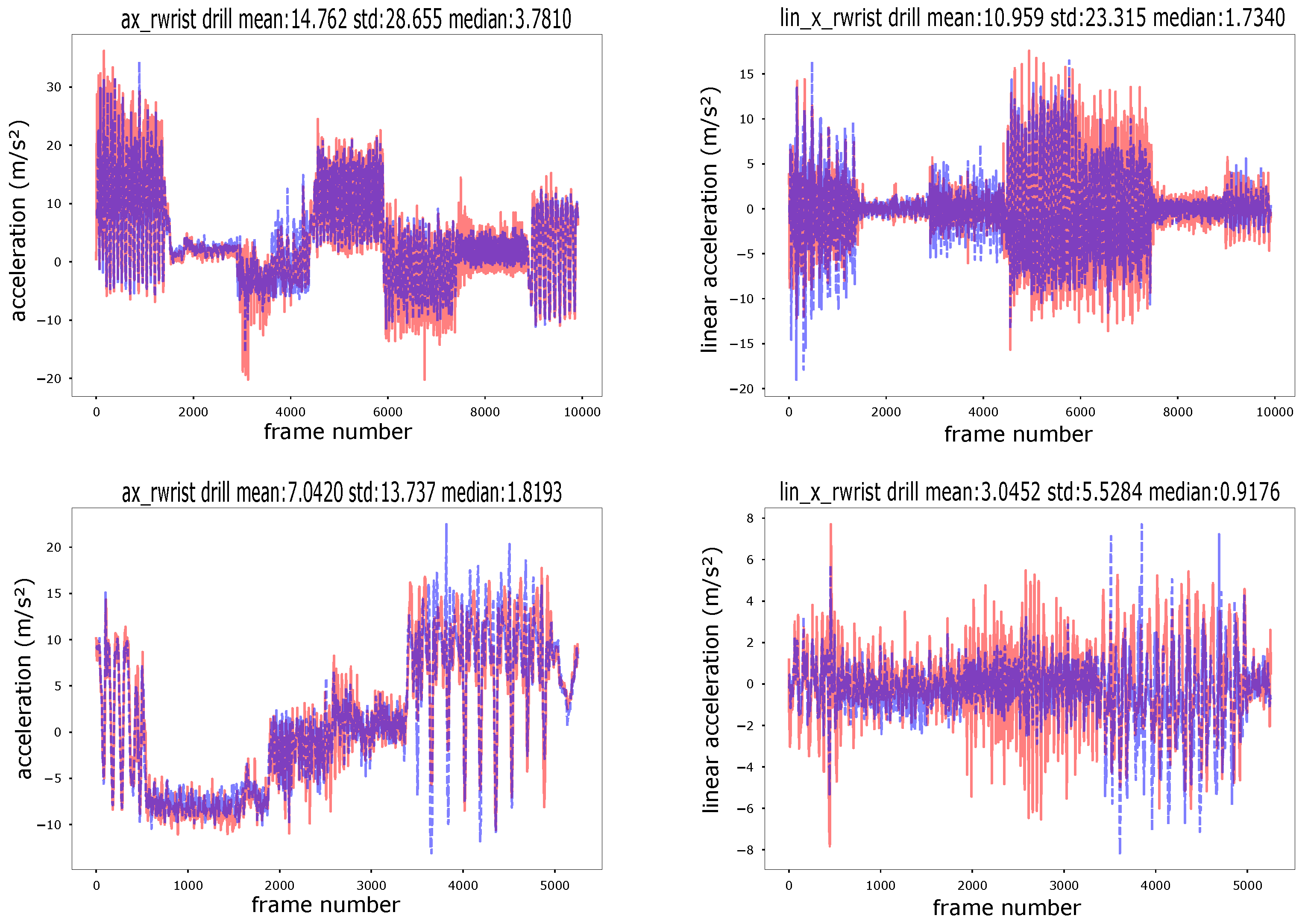
- The left part of Figure 9 shows an example of a “good” simulation. It can be seen that the simulated gyro signal nearly perfectly tracks the real gyro, even through fairly subtle features. Except for the amplitude issues the same holds for the accelerometer signal. Note that while the signal segment contains subtle and fast components, it does not have very high frequency “singular” peaks, which is a key reason why the system works so well here.
- On the right side of Figure 9 a case of much poorer performance is shown. This is largely due to the presence of many singular high frequency, high amplitude peaks which especially the acceleration signal fails to track correctly.
- With respect to the linear acceleration Figure 9 shows two things. First we see on the right side that using the norm linear acceleration instead of the norm raw acceleration signal indeed does solve the problem of the system refusing to model signal values below the baseline of 1 g. On the other hand, as shown in the left part of the figure, using linear acceleration may lead to signal characteristics changing and acquiring additional high frequency peaks which can be difficult to model.
5.2. Effects of Pre-Processing
5.2.1. Signal Level Effects of Filtering and Scaling
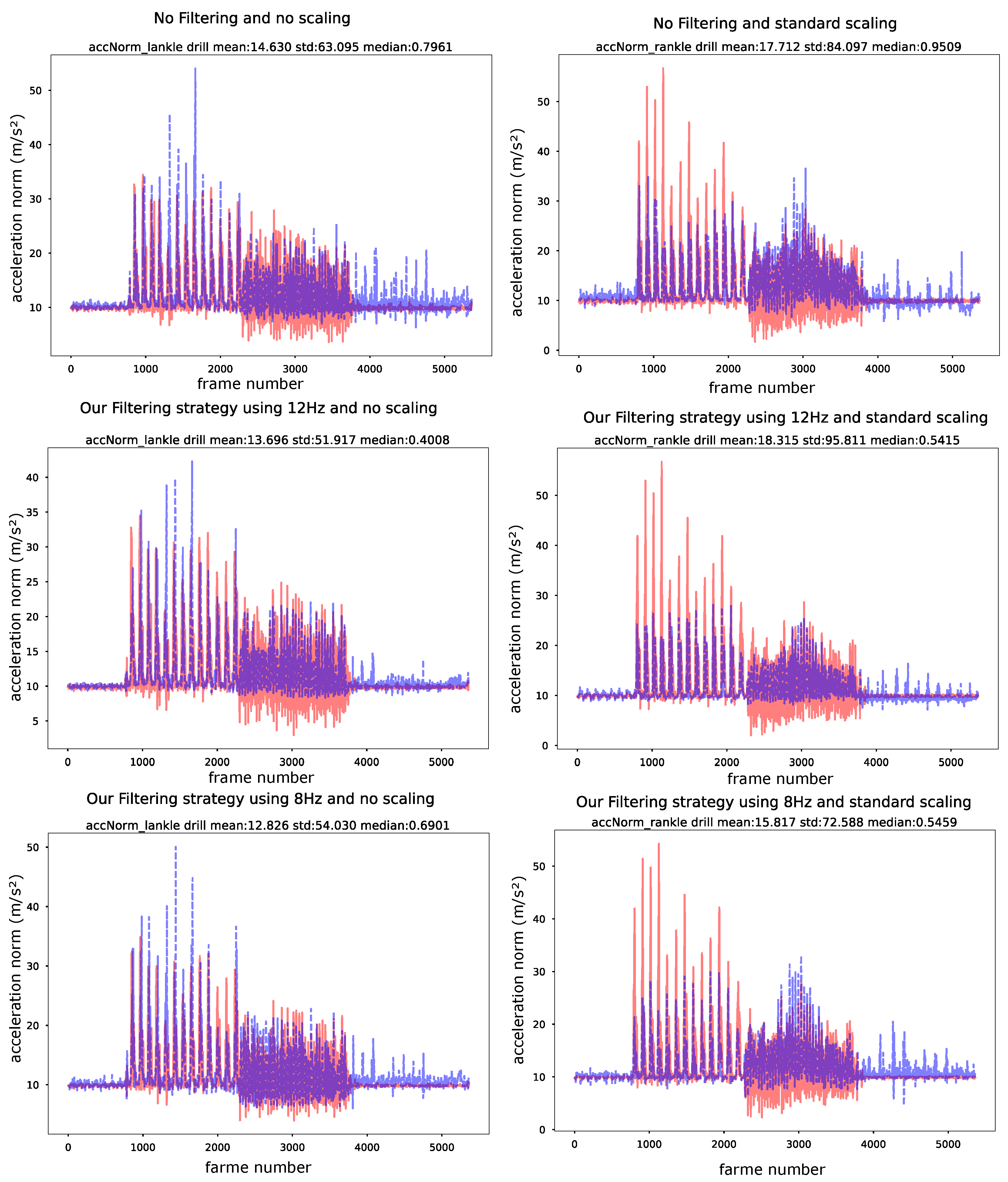
- Overall there is no dramatic effect. In all cases the simulated signal follows the structure of the real signal with reasonable accuracy while displaying the same types of problems.
- Without scaling (left column on Figure 13) there are some pronounced amplitude outliers in the high frequency peaks amplitudes (between sample 1000 and 2000) that are not influenced by the frequency filtering. These disappear in the scaled versions (right column); however, at the cost of significant underestimation of the amplitude in the same area and overestimation around 3000.
- In Figure 13 frequency filtering has little effect, except for reducing the underestimation of the components below 1 g around sample 3000 in the no scaling case (which overall seems to be the best).
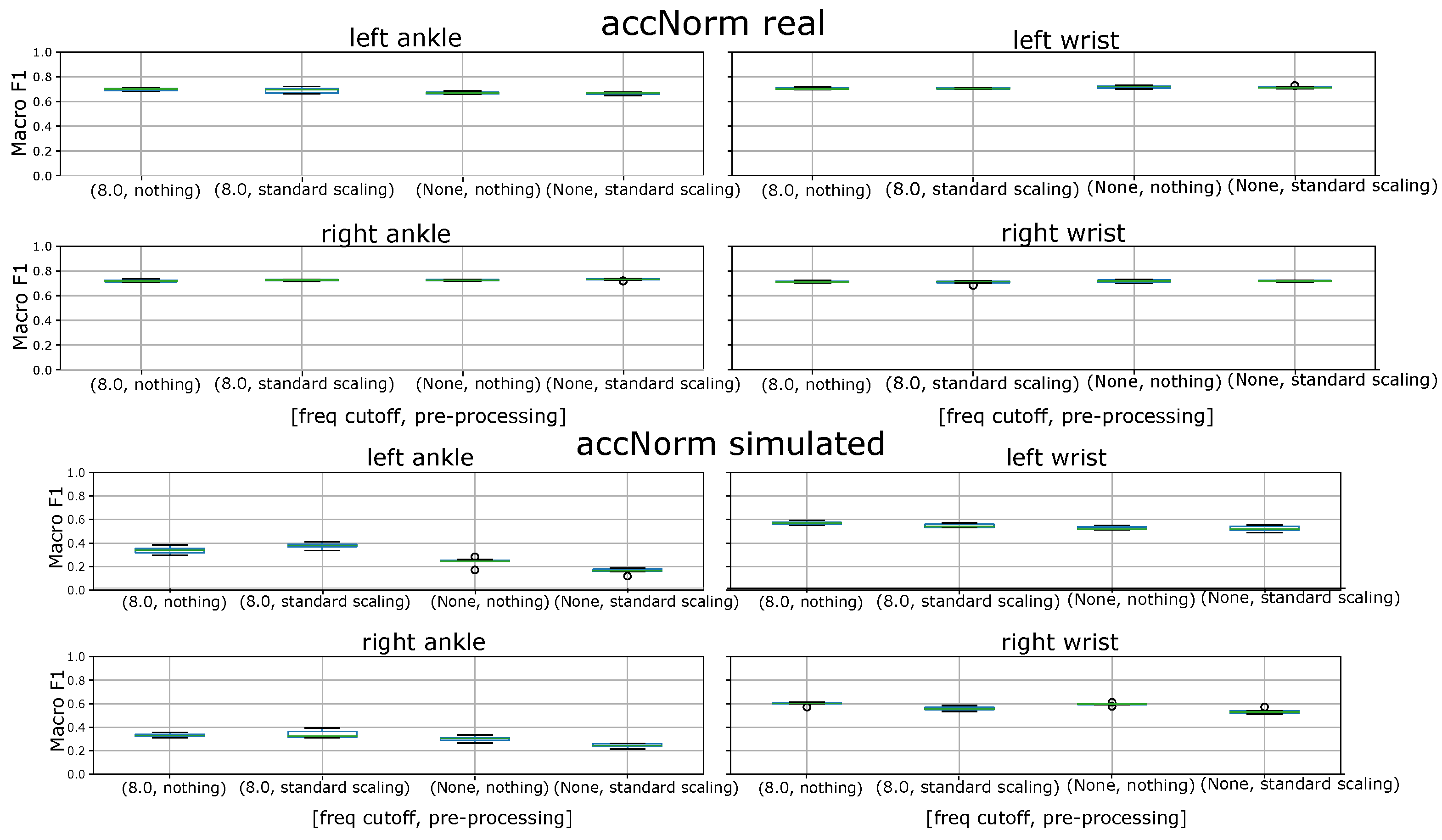
5.2.2. Classification Level Effects of Filtering and Scaling
5.3. Evaluation of Classification Performance Using the Simulated Signals
- Baseline. The recognition rates on the real data reach up to 90% which, given the fact that our aim was not to optimize a recognition system for a specific application, is an acceptable baseline to evaluate the performance of the simulated sensor data.
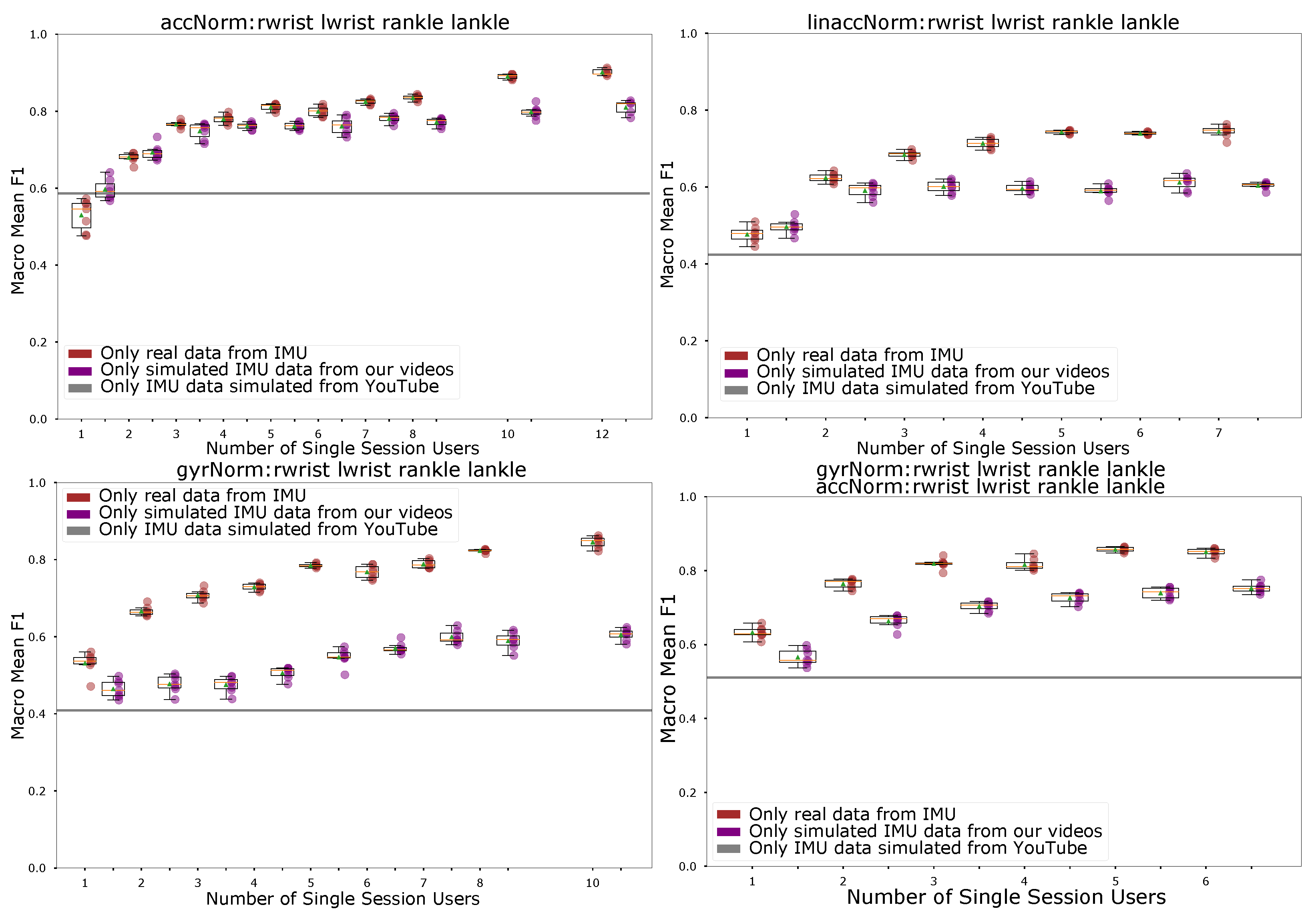
- Overall performance on simulated sensor data. Systems trained on the simulated data reach up to 80% recognition rate, which is 10% below the results (see e.g., Figure 16 left where the acceleration norm based recognition is among the best performing variants overall). In general as the number of users is small the results for real and simulated data are very similar to the performance of the real data. The performance on the real sensor data improves faster with the amount of training data. This is to be expected as with a very small number of users (equal a small amount of training data) the recognition rate tends to be poor and limiting factor for the performance is the lack of diversity in the data and not the data quality. As the amount of data increases, the quality becomes the limiting factor, which is better for the real sensor data.
- Performance on YouTube data. The performance of the system based on sensor data simulated from YouTube videos is in most cases slightly below the performance of the baseline on a single or two users. Given that the total amount of YouTube data (around 14 min) is in the order of magnitude of the length of the data from a single user this is not surprising.
- Compensating deficiencies of simulated data through training set size. There is strong indication that deficiencies of the simulated sensor data can be compensated by the amount of such data. Thus in most cases (see discussion of different sensor combinations later on) systems based on simulated sensor data can match the performance of the real sensor data based system trained on about half as much data. Again looking at the acceleration norm from all sensors case in Figure 16 left top we see that the Mean F1 score for simulated data with 12 users is about the same as the score for 6 users with real data. Furthermore, while we see a slower growth of the F1 score with the number of users in the training set for the case of simulated data than for real data, in most cases growth exists.
- Effects of model fine tuning using real sensor data. Another way to improve the performance of the simulated sensor data based systems is to use small amounts of real sensor data to fine-tune it. The idea is that collecting a small amount of real data is nearly always possible, it is the bulk of a large training data set that is difficult to collect and that we want to get from existing videos. The results of this strategy are illustrated in Figure 17. We compare the baseline to the performance of a system trained on simulated data to which 1 (blue points) or 2 (yellow points) users with real data have been added. We can see that the simulated data is now much closer to the real one. In the top left graph showing the acceleration norm results it is virtually identical up to 10 users when the real data starts to overtake the simulated one. The effect is even more significant for the gyro norm based recognition (see Figure 17 right top) where the purely simulated signals based model trailed the real signals based ones by 30% and more (see Figure 16 left bottom) and are now not worse than about 10% worse (and up to 6 users nearly identical).
- Effects of adding simulated data from YouTube to small amounts of real data. Another situation where a combination of real and simulated signals may be useful is when we have only a small amount of sensor-based training data with no easy possibility of collecting more. We then try to “top up” our training set with some simulated data from video. The effect of such a strategy is illustrated by the green points (real IMU data with YouTube) in Figure 17 where we combine the real sensor data with the YouTube data increasing the number of real data over the x axis. We can see that for small user numbers the strategy indeed helps.
- Performance of different sensors and sensor combinations. Most of the discussion so far has been done with respect to the acceleration norm (Figure 16 and Figure 17) applied to both wrists and both ankles together which has been the most effective modality with respect to the recognition performance both in the real sensor signal and with respect to how well the simulated signal can approximate it. Given the type of activities that we use as our test set this is not surprising. The activities are characterized by periodic, mostly strong motions of various limbs. In most cases the relative temporal pattern and relative intensity of the motions is a characteristic feature. At the same time, the acceleration norm (in particular when looking at the relative intensity and temporal patterns) is fairly robust against variations and noise. This also means that imperfections caused by the simulation of the signal from the video data using our regression model can be well tolerated.Further sensor modalities and their combinations that we investigated are:
- (a)
- Acceleration norm vs. Gyro norm vs. combination. In Figure 16 we have in addition to the acceleration norm the linear acceleration norm, the gyroscope norm, and the combination of gyroscope and acceleration norms (in all cases for all the 4 sensor placements). The first thing we see is that the linear acceleration leads to a poorer overall performance while having little impact on the relative performance of the simulated data. The former is not surprising since the gravity component (meaning vertical orientation) is a very important piece of information. The latter is contrary to what we might have expected since our model was not tuned to capture gravity effects (as discussed in Section 2). Apparently it was still able to capture a sufficient amount of orientation related information. Second, we see that the gyro signal has significantly worse relative performance for the simulated signal. Given the limitations on recognizing rotations around certain axes (in particular the limb axis) from the video signal discussed in Section 2 this was to be expected. The very poor performance of the simulated gyro signal also drags down the combined acceleration/gyro norm performance shown in the bottom right part of Figure 16.
- (b)
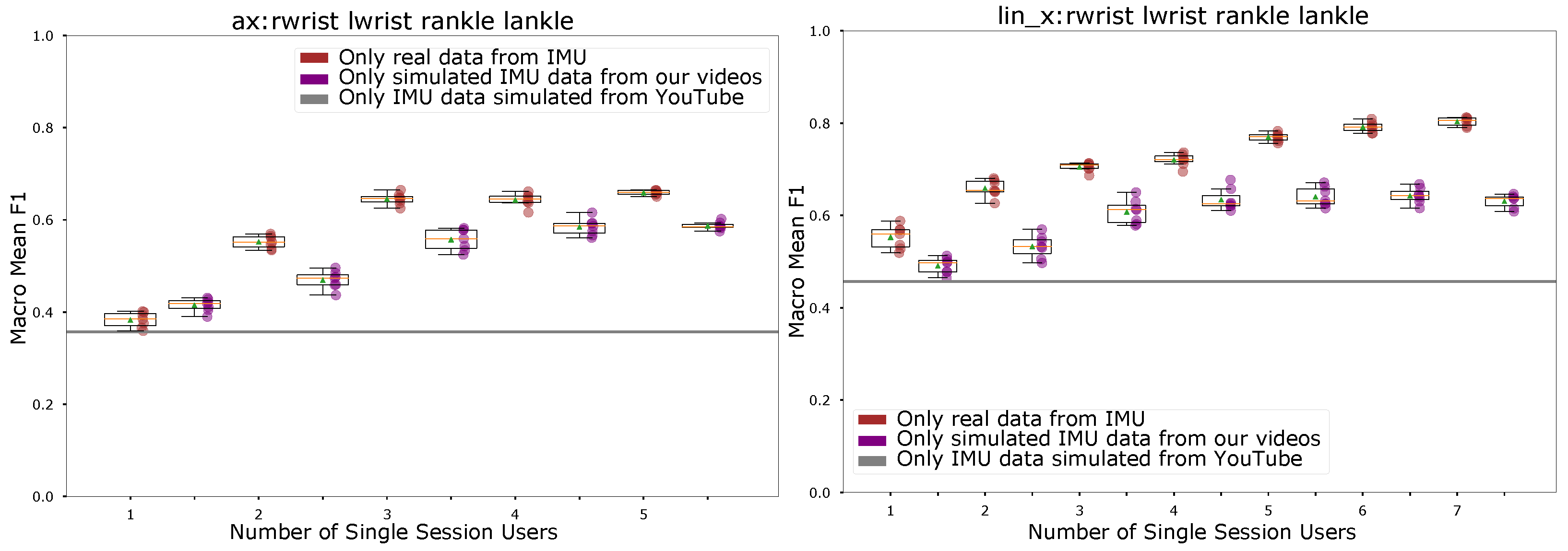
- Acceleration and linear acceleration on the limb’s axis. Further looking at the impact of linear acceleration Figure 18 shows the results for raw acceleration and linear acceleration along the limb axis. The idea is that the acceleration along the axis is independent of the rotation around the axis, which, as already explained is hard to exactly capture from video. It can be seen that both have slightly lower performance than the acceleration norm (which is not surprising given that the acceleration norm is a good discriminator for our set of activities as described above). Within expected statistical bounds the difference between the simulated and the real sensor signal is about the same for both the raw and the linear acceleration.
- (c)
- Different sensor placements. In Section 5.2.2 we have already considered the use of sensors from only a wrist or only the ankle (with respect to acceleration norm) as shown in Figure 15. The performance for the real sensor data on both the wrist and the ankle and the simulated sensor data on the wrist was with around 10–20% less than for the combination which is not a surprising result (both legs and arms are relevant for our test activities). What may be surprising at first is the fact that the performance for the ankle using simulated data is half that of the real data (30–40%). The explanation is that foot motions involve a lot of hard ground impacts that lead to “ringing” that has already often been mentioned as something that the simulated data cannot replicate (which is why 8 Hz filtering helps a lot here). In addition vertical orientation plays a bigger role than for the wrists and there are many motions “to the front” (towards the camera) which are more difficult to resolve due to the viewing angle.
- Effects of 8 Hz Filtering. The effect of various pre-processing strategies has already been discussed in Section 5.2 establishing that while filtering and to some degree scaling did seem to be beneficial in some cases, overall the effect was not overwhelming given that these effects may be strongly application specific. This is why we have decided to do most of the analysis in this section on the unfiltered, not scaled signal. However, for comparison Figure 19 includes the same evaluation done in Figure 16 with 8 Hz filtering. We can see that, while for the gyro norm (which was the poorest one to start with) the filtering does indeed improve the relative performance of the simulated signal based model, it has little effect otherwise.
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Lara, O.D.; Labrador, M.A. A survey on human activity recognition using wearable sensors. IEEE Commun. Surv. Tutor. 2012, 15, 1192–1209. [Google Scholar] [CrossRef]
- Wang, J.; Chen, Y.; Hao, S.; Peng, X.; Hu, L. Deep learning for sensor-based activity recognition: A survey. Pattern Recognit. Lett. 2019, 119, 3–11. [Google Scholar] [CrossRef] [Green Version]
- Sun, C.; Shrivastava, A.; Singh, S.; Gupta, A. Revisiting unreasonable effectiveness of data in deep learning era. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 843–852. [Google Scholar]
- Brain, D.; Webb, G. On the effect of data set size on bias and variance in classification learning. In Proceedings of the Fourth Australian Knowledge Acquisition Workshop; University of New South Wales: Sydney, Australia, 1999; pp. 117–128. [Google Scholar]
- Wang, L.; Gjoreski, H.; Ciliberto, M.; Lago, P.; Murao, K.; Okita, T.; Roggen, D. Summary of the Sussex-Huawei Locomotion-Transportation Recognition Challenge 2020. In Adjunct Proceedings of the 2020 ACM International Joint Conference on Pervasive and Ubiquitous Computing and Proceedings of the 2020 ACM International Symposium on Wearable Computers; Association for Computing Machinery: New York, NY, USA, 2020; pp. 351–358. [Google Scholar] [CrossRef]
- Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Bernstein, M.; et al. ImageNet Large Scale Visual Recognition Challenge. Int. J. Comput. Vis. (IJCV) 2015, 115, 211–252. [Google Scholar] [CrossRef] [Green Version]
- Knoll, F.; Murrell, T.; Sriram, A.; Yakubova, N.; Zbontar, J.; Rabbat, M.; Defazio, A.; Muckley, M.J.; Sodickson, D.K.; Zitnick, C.L.; et al. Advancing machine learning for MR image reconstruction with an open competition: Overview of the 2019 fastMRI challenge. Magn. Reson. Med. 2020, 84, 3054–3070. [Google Scholar] [CrossRef] [PubMed]
- Reiss, A.; Stricker, D. Creating and benchmarking a new dataset for physical activity monitoring. In Proceedings of the 5th International Conference on PErvasive Technologies Related to Assistive Environments, Crete, Greece, 6–8 June 2012; pp. 1–8. [Google Scholar]
- Reiss, A.; Stricker, D. Introducing a new benchmarked dataset for activity monitoring. In Proceedings of the 2012 16th International Symposium on Wearable Computers, Newcastle, UK, 18–22 June 2012; pp. 108–109. [Google Scholar]
- Chavarriaga, R.; Sagha, H.; Calatroni, A.; Digumarti, S.T.; Tröster, G.; Millán, J.d.R.; Roggen, D. The Opportunity challenge: A benchmark database for on-body sensor-based activity recognition. Pattern Recognit. Lett. 2013, 34, 2033–2042. [Google Scholar] [CrossRef] [Green Version]
- Roggen, D.; Calatroni, A.; Rossi, M.; Holleczek, T.; Förster, K.; Tröster, G.; Lukowicz, P.; Bannach, D.; Pirkl, G.; Ferscha, A.; et al. Collecting complex activity datasets in highly rich networked sensor environments. In Proceedings of the 2010 Seventh International Conference on Networked Sensing Systems (INSS), Kassel, Germany, 15–18 June 2010; pp. 233–240. [Google Scholar]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. Imagenet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- Smaira, L.; Carreira, J.; Noland, E.; Clancy, E.; Wu, A.; Zisserman, A. A Short Note on the Kinetics-700-2020 Human Action Dataset. arXiv 2020, arXiv:cs.CV/2010.10864. [Google Scholar]
- Rey, V.F.; Hevesi, P.; Kovalenko, O.; Lukowicz, P. Let There Be IMU Data: Generating Training Data for Wearable, Motion Sensor Based Activity Recognition from Monocular RGB Videos. In Adjunct Proceedings of the 2019 ACM International Joint Conference on Pervasive and Ubiquitous Computing and Proceedings of the 2019 ACM International Symposium on Wearable Computers; Association for Computing Machinery: New York, NY, USA, 2019; pp. 699–708. [Google Scholar] [CrossRef]
- Asare, P.; Dickerson, R.F.; Wu, X.; Lach, J.; Stankovic, J.A. BodySim: A multi-domain modeling and simulation framework for body sensor networks research and design. In Proceedings of the 11th ACM Conference on Embedded Networked Sensor Systems, Roma, Italy, 5–11 November 2013; pp. 1–2. [Google Scholar]
- Ascher, C.; Kessler, C.; Maier, A.; Crocoll, P.; Trommer, G. New pedestrian trajectory simulator to study innovative yaw angle constraints. In Proceedings of the 23rd International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2010), 21–24 September 2010; pp. 504–510. [Google Scholar]
- Young, A.D.; Ling, M.J.; Arvind, D.K. IMUSim: A simulation environment for inertial sensing algorithm design and evaluation. In Proceedings of the 10th ACM/IEEE International Conference on Information Processing in Sensor Networks, Chicago, IL, USA, 12–14 April 2011; pp. 199–210. [Google Scholar]
- Zampella, F.J.; Jiménez, A.R.; Seco, F.; Prieto, J.C.; Guevara, J.I. Simulation of foot-mounted IMU signals for the evaluation of PDR algorithms. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation, Portland, OR, USA, 21–24 September 2011; pp. 1–7. [Google Scholar]
- Smith, M.; Moore, T.; Hill, C.; Noakes, C.; Hide, C. Simulation of GNSS/IMU measurements. In Proceedings of the ISPRS International Workshop. Working Group I/5: Theory, Technology and Realities of Inertial/GPS Sensor Orientation, Castelldefels, Spain, 22–23 September 2003; pp. 22–23. [Google Scholar]
- Parés, M.; Rosales, J.; Colomina, I. Yet another IMU simulator: Validation and applications. In Proceedings of the Eurocow, Castelldefels, Spain, 30 January–1 February 2008. [Google Scholar]
- Cao, Z.; Hidalgo, G.; Simon, T.; Wei, S.E.; Sheikh, Y. OpenPose: Realtime multi-person 2D pose estimation using Part Affinity Fields. arXiv 2018, arXiv:1812.08008. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Banos, O.; Calatroni, A.; Damas, M.; Pomares, H.; Rojas, I.; Sagha, H.; del R. Mill´n, J.; Troster, G.; Chavarriaga, R.; Roggen, D. Kinect=IMU? Learning MIMO Signal Mappings to Automatically Translate Activity Recognition Systems across Sensor Modalities. In Proceedings of the 2012 16th International Symposium on Wearable Computers, Newcastle, UK, 18–22 June 2012; pp. 92–99. [Google Scholar]
- Kanazawa, A.; Black, M.J.; Jacobs, D.W.; Malik, J. End-to-end recovery of human shape and pose. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 7122–7131. [Google Scholar]
- Elhayek, A.; Kovalenko, O.; Murthy, P.; Malik, J.; Stricker, D. Fully Automatic Multi-person Human Motion Capture for VR Applications. In Proceedings of the International Conference on Virtual Reality and Augmented Reality—EuroVR, London, UK, 22–23 October 2018; pp. 28–47. [Google Scholar]
- Mehta, D.; Sridhar, S.; Sotnychenko, O.; Rhodin, H.; Shafiei, M.; Seidel, H.P.; Xu, W.; Casas, D.; Theobalt, C. Vnect: Real-time 3D human pose estimation with a single rgb camera. ACM Trans. Gr. 2017, 36, 44. [Google Scholar] [CrossRef] [Green Version]
- Rogez, G.; Weinzaepfel, P.; Schmid, C. Lcr-net++: Multi-person 2d and 3d pose detection in natural images. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 42, 1146–1161. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Murthy, P.; Kovalenko, O.; Elhayek, A.; Gava, C.C.; Stricker, D. 3D Human Pose Tracking inside Car using Single RGB Spherical Camera. In Proceedings of the ACM Chapters Computer Science in Cars Symposium (CSCS); ACM: New York, NY, USA, 2017. [Google Scholar]
- Omran, M.; Lassner, C.; Pons-Moll, G.; Gehler, P.; Schiele, B. Neural body fitting: Unifying deep learning and model based human pose and shape estimation. In Proceedings of the 2018 international conference on 3D vision (3DV), Verona, Italy, 5–8 September 2018; pp. 484–494. [Google Scholar]
- Bogo, F.; Kanazawa, A.; Lassner, C.; Gehler, P.; Romero, J.; Black, M.J. Keep it SMPL: Automatic estimation of 3D human pose and shape from a single image. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2016; pp. 561–578. [Google Scholar]
- Yao, S.; Zhao, Y.; Shao, H.; Zhang, C.; Zhang, A.; Hu, S.; Liu, D.; Liu, S.; Su, L.; Abdelzaher, T. Sensegan: Enabling deep learning for internet of things with a semi-supervised framework. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2018, 2, 144. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Luo, J.; Younes, R. ActivityGAN: Generative adversarial networks for data augmentation in sensor-based human activity recognition. In Proceedings of the Adjunct Proceedings of the 2020 ACM International Joint Conference on Pervasive and Ubiquitous Computing and Proceedings of the 2020 ACM International Symposium on Wearable Computers; ACM: New York, NY, USA, 2020; pp. 249–254. [Google Scholar]
- Radhakrishnan, S. Domain Adaptation of IMU Sensors Using Generative Adversarial Networks. 2020. Available online: https://www.diva-portal.org/smash/record.jsf?pid=diva2%3A1505604&dswid=5801 (accessed on 1 January 2021).
- Qian, X.; Fu, Y.; Xiang, T.; Wang, W.; Qiu, J.; Wu, Y.; Jiang, Y.G.; Xue, X. Pose-normalized image generation for person re-identification. In Proceedings of the European conference on computer vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 650–667. [Google Scholar]
- Sirignano, J.; Spiliopoulos, K. DGM: A deep learning algorithm for solving partial differential equations. J. Comput. Phys. 2018, 375, 1339–1364. [Google Scholar] [CrossRef] [Green Version]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics informed deep learning (part i): Data-driven solutions of nonlinear partial differential equations. arXiv 2017, arXiv:1711.10561. [Google Scholar]
- Takeda, S.; Okita, T.; Lago, P.; Inoue, S. A Multi-Sensor Setting Activity Recognition Simulation Tool. In Proceedings of the 2018 ACM International Joint Conference and 2018 International Symposium on Pervasive and Ubiquitous Computing and Wearable Computers; ACM: New York, NY, USA, 2018; pp. 1444–1448. [Google Scholar] [CrossRef]
- Lago, P.; Takeda, S.; Okita, T.; Inoue, S. MEASURed: Evaluating Sensor-Based Activity Recognition Scenarios by Simulating Accelerometer Measures from Motion Capture. In Human Activity Sensing; Springer: Berlin, Germany, 2019; pp. 135–149. [Google Scholar]
- Kwon, H.; Tong, C.; Haresamudram, H.; Gao, Y.; Abowd, G.D.; Lane, N.D.; Ploetz, T. IMUTube: Automatic extraction of virtual on-body accelerometry from video for human activity recognition. arXiv 2020, arXiv:2006.05675. [Google Scholar] [CrossRef]
- Radu, V.; Henne, M. Vision2Sensor: Knowledge Transfer Across Sensing Modalities for Human Activity Recognition. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2019, 3. [Google Scholar] [CrossRef] [Green Version]
- Video that was Followed to Produce the Drill Dataset. Available online: https://www.youtube.com/watch?v=R0mMyV5OtcM (accessed on 6 July 2020).
- Cao, Z.; Simon, T.; Wei, S.E.; Sheikh, Y. Realtime multi-person 2d pose estimation using part affinity fields. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7291–7299. [Google Scholar]
- Bai, S.; Kolter, J.Z.; Koltun, V. An empirical evaluation of generic convolutional and recurrent networks for sequence modeling. arXiv 2018, arXiv:1803.01271. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Video that was Followed to Produce our Seed Motions. Available online: https://www.youtube.com/watch?v=14Cyw7VDsw0 (accessed on 24 March 2021).




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Video URL | Activity (ies) | Seconds Used | fps |
|---|---|---|---|
| https://www.youtube.com/watch?v=7X2Yx29DdBY | Cross Toe Touches | 113 | 30 |
| https://www.youtube.com/watch?v=8gLdmb9Ivkw&LateralSteps+Pulls | 32 | 30 | |
| https://www.youtube.com/watch?v=9-jBOcGeQcg | 4 Torso Twists + Knees | 16 | 30 |
| https://www.youtube.com/watch?v=afghBre8NlI | Squats | 83 | 30 |
| https://www.youtube.com/watch?v=enz5TSRMmyM | High Knee + Pulls | 13 | 25 |
| https://www.youtube.com/watch?v=g-S1c-Scu3E | Lateral Steps + Pulls | 33 | 30 |
| https://www.youtube.com/watch?v=Kn621fAVEEI | Boxer Shuffle | 9 | 30 |
| https://www.youtube.com/watch?v=MG8DJpN-35g | 4 Torso Twists + Knees | 48 | 30 |
| https://www.youtube.com/watch?v=mGvzVjuY8SY | Squats | 100 | 30 |
| https://www.youtube.com/watch?v=oMW59TKZvaI | Slow Rocking Butt Kickers | 10 | 24 |
| https://www.youtube.com/watch?v=ZiJdpPJbqYg | Front Kicks | 4 | 30 |
| https://www.youtube.com/watch?v=R0mMyV5OtcM | All of the Drill Activities | 303.81 | 60 |
| Dataset | Video | Sensor Data | Subjects | fps | Total min |
|---|---|---|---|---|---|
| Collected generic motions | yes | yes | 8 | 50 | 99 |
| YouTube videos | yes | no | 12 | 24 to 60 | 14 |
| Drill Dataset Training | yes | yes | 17 | 50 | 85 |
| Drill Dataset Test | no | yes | 11 | - | 140 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fortes Rey, V.; Garewal, K.K.; Lukowicz, P. Translating Videos into Synthetic Training Data for Wearable Sensor-Based Activity Recognition Systems Using Residual Deep Convolutional Networks. Appl. Sci. 2021, 11, 3094. https://0-doi-org.brum.beds.ac.uk/10.3390/app11073094
Fortes Rey V, Garewal KK, Lukowicz P. Translating Videos into Synthetic Training Data for Wearable Sensor-Based Activity Recognition Systems Using Residual Deep Convolutional Networks. Applied Sciences. 2021; 11(7):3094. https://0-doi-org.brum.beds.ac.uk/10.3390/app11073094
Chicago/Turabian StyleFortes Rey, Vitor, Kamalveer Kaur Garewal, and Paul Lukowicz. 2021. "Translating Videos into Synthetic Training Data for Wearable Sensor-Based Activity Recognition Systems Using Residual Deep Convolutional Networks" Applied Sciences 11, no. 7: 3094. https://0-doi-org.brum.beds.ac.uk/10.3390/app11073094