1. Introduction
The computation and prediction of subsidence, due to the exploitation of an underground deposit of hydrocarbons, is generally a very complex task and involves advanced numerical simulations [
1,
2]. The problem physics includes the evolution of the fluid pressure in the deposit and the correct evaluation of the time-varying stress field in the compacting soil/rock. The corresponding fluid and solid problems can be addressed in a coupled [
3] or uncoupled approach [
4] and other variants, including for example sequential coupling [
5]. In the latter case, for a domain treated as a solid continuum, nonlinear constitutive models accounting for creep become necessary.
The several stress–strain time-dependent models for soils that have been presented in the literature mainly fall within the following two main categories:(i) models based on the concept of overstress and (ii) models based on nonstationary yield theory, where the classical plasticity yield limit is generalized to a viscoplastic yield locus that depends on a time-dependent function, see e.g., [
6,
7] and the reviews in [
8,
9]. By following the overtress approach, the Vermeer–Neher (V-N) model [
10,
11], which addresses materials with a high degree of compressibility, such as soft soils, and generalizes odometer test results to fully three-dimensional conditions accounting also for (secondary) creep through an elastic-viscoplastic model, has encountered a significant popularity and is still actively used in the oil and gas industry for subsidence modeling, to predict the deformation of the ground surface induced by hydrocarbon withdrawal from underground reservoirs. The reason for its success in engineering practice [
12,
13] rests on its relative simplicity and the limited number of required parameters that can be obtained by a few standard experimental tests.
As any other elastic-viscoplastic model, the V-N model requires a time integration scheme to be implemented in a finite element code. Both explicit [
12,
13] and (semi-)implicit schemes [
10,
14] were used in the past for the V-N model time integration at the local level. For the semi-implicit time integration approaches [
10,
14], there are unsolved issues: namely, the deviatoric strain increment is not accounted for [
14], so that the integration is not actually fully implicit, and in general, the convergence is at best sublinear for the time integration at the global level.
Very recently [
15], a fully implicit backward Euler formulation for the local time integration of the V-N model was proposed, in combination with a preconditioned conjugate gradient (PCG) technique for the global solver. In this formulation, the tangent stiffness matrix, however, is artificially symmetrized (this is a requirement for the PCG method), and its entries are computed numerically, without providing their analytical expression. Despite the popularity of the V-N model, its intense use in practical engineering applications, and the fact that its implementation is still the object of new contributions in the scientific literature, a robust and completely consistent implicit backward Euler integration of the model, together with an analytical expression of its consistent tangent matrix, is still missing. The reason for this deficiency is probably due to the technical difficulties involved in the formulation of the Newton–Raphson local iterative scheme, necessary to obtain the updated stress and viscoplastic strain increments, and most of all, in the laborious derivation of the analytical expression of the consistent tangent matrix for the global Newton–Raphson scheme.
A consistent tangent matrix formulation and Newton–Raphson scheme for the implicit integration of an elastoplastic finite element model in large strains was proposed for the first time by Nagtegaal [
16]. Simo and Taylor [
17] clarified the difference between the tangent matrix for the rate problem and the consistent tangent matrix for the backward Euler iterative scheme. Simo et al. [
18] and Perego [
19] discussed the formulation of consistent backward Euler approaches in the case of multi-surface plasticity models with corners. Borja [
20,
21] provided a detailed presentation of the consistent backward Euler integration of a Cam–Clay model. Despite the fact that the theoretical aspects connected with the backward Euler integration of elastoplastic constitutive models were exhaustively treated in the literature mentioned above, the application of implicit integration schemes to viscoplastic models has continued to attract the interest of the research community, due to the already mentioned technical difficulties. De Borst and Heeres [
22] provided a unified scheme for standard and viscous plasticity models in geomechanics. Grimstad and Degago in [
23] implemented an implicit backward Euler integration scheme for a similar (n-SAC) model (see also, e.g., [
24,
25] and the references therein).
To fill the gap in the implicit implementation of the V-N model and to provide an efficient analysis tool to the engineering community, in this work we present a rigorous backward Euler time integration scheme with a Newton–Raphson solution of the nonlinear equations at the integration point. In addition, we provide a closed form for the consistent tangent stiffness matrix, showing that superior performances are obtained when the non-symmetric nature of the tangent stiffness matrix is preserved. A short version of the algorithm proposed here was anticipated in a conference paper [
26]. In the present paper, we present a complete and detailed derivation, together with a rigorous validation procedure. Indeed, one of the critical points in the analytical derivation of the consistent tangent matrix is its validation. The procedure followed for this purpose is therefore described in detail. The implicit integration of the model was implemented as a user material subroutine in the finite element code Abaqus Standard™. The accuracy and practical effectiveness of the implemented model were validated through numerical examples, both at material point level and at the scale of a real reservoir.
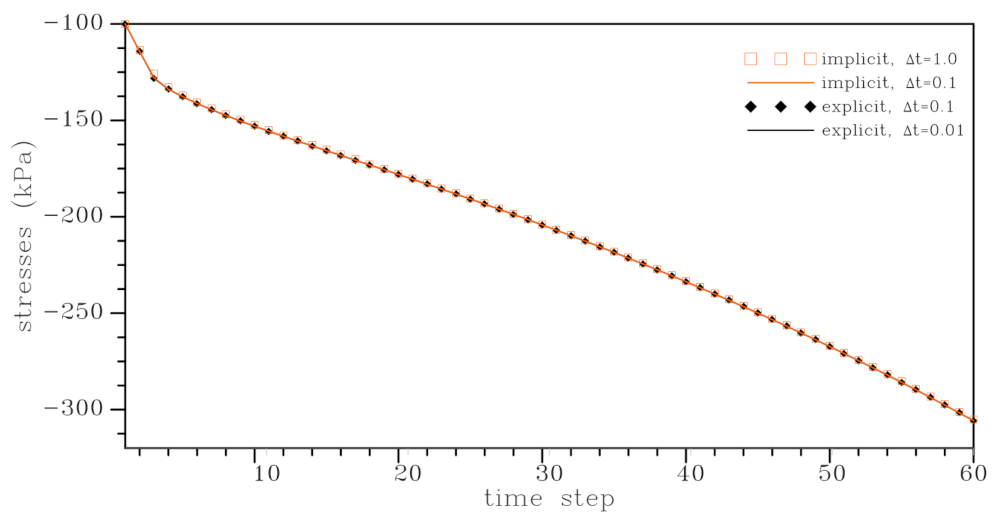
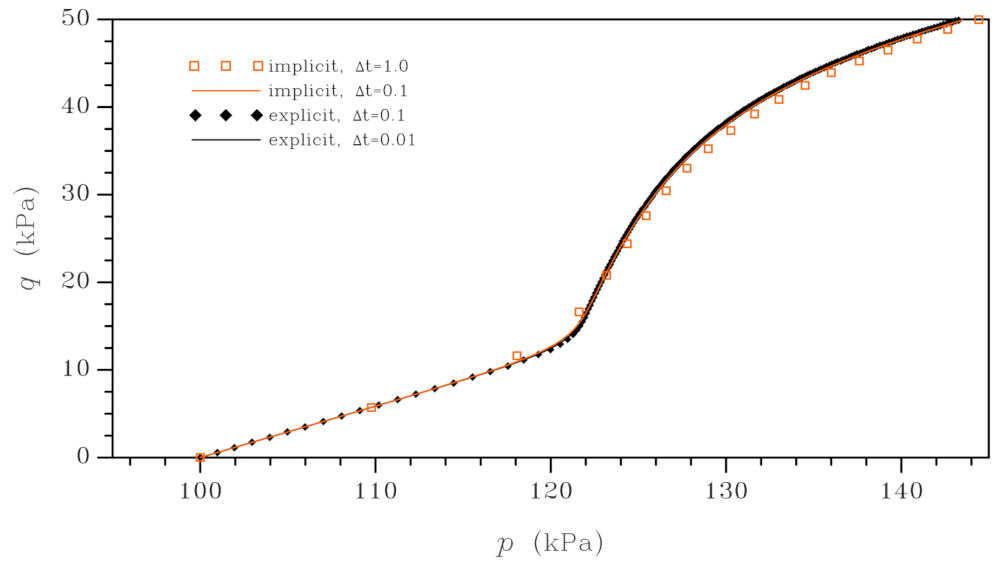
The computing performances of the proposed backward Euler integration were assessed by comparison against the fully explicit formulation proposed in [
13] and the fully implicit one recently proposed in [
15]. While implicit schemes are unconditionally stable, but generally require an iterative scheme for the solution of the implicit problem generated at each Gauss point, explicit integration schemes are only conditionally stable and require a high number of very small time increments. This drawback could be mitigated by adopting an adaptive sub-stepping technique. The obtained results show the superiority of the proposed backward Euler implementation with respect to the fully explicit references, confirming that the tangent stiffness matrix consistent with the global time integration, as the one derived in this paper, allows for a substantial computational gain in terms of overall analysis time with respect to both the explicit and implicit time integration approaches. It is also worthwhile to emphasize that the original version of the V-N model has a deficiency in the definition of the critical state (see e.g., [
9]), but this problem is not addressed in the present paper. Finally, we mention that, while an anisotropic formulation for the V-N model has been provided [
27], this work refers to the simpler, isotropic version [
10,
11].
2. Constitutive Model in Rate Form
Under the assumption of infinitesimal strains, the elasto-viscoplastic constitutive model of [
11] is based on the following definition of the effective stress rate, positive if compressive (note that, to simplify the notation and in contrast to what is usually done in soil mechanics, the symbol
σ is used to denote the effective stress and not the total stress):
where
t is the physical time,
σ denotes the effective stress,
e the total strain, and
D the isotropic elastic tensor:
where
I is the second-order identity tensor and
II is the fourth-order tensor of Cartesian components:
G and
K are the shear and bulk modulus, respectively. Finally,
in (
1) is the viscoplastic strain rate:
is a scalar viscoplastic multiplier, introduced for convenience of notation, and
is the plastic potential, defined as:
In (
5), a comma denotes the partial derivative with respect to the variable after the comma,
and the non-dimensional parameters
,
, and
are material parameters, which will be defined below,
is the effective hydrostatic pressure,
is the effective deviatoric stress,
s being the deviatoric stress tensor, and
M is the slope of the critical state line in the
plane (see
Figure 1). Finally,
(note that in this case, there is no comma before the subscript
p) is an internal variable, to be interpreted as a generalized consolidation pressure, governing the hardening behavior of the viscoplastic response.
,
,
, and
are material parameters with a clear physical meaning and easily identifiable through standard laboratory tests, such as odometric tests.
is a characteristic time, usually set equal to 24 h.
is the modified creep index (modified because it is expressed in terms of the volumetric strain rather than the void ratio), which can be obtained in the long term from: (i) the slope of volumetric strain
versus the logarithm of time [
11] (see
Figure 2a), (ii) the slope of the inverse of volumetric strain rate versus time (see [
28]), and (iii) the slope of logarithm of strain rate versus strain (see [
29]), while
is the modified compression index, measuring the slope of the normal consolidation line in the
plane (see
Figure 2b), and
is the modified swelling index, measuring the slope of the unloading or swelling curve in the same plot. The parameters
and
should not be confused with the more commonly used
and
(without the
at the apex): Equation (
31) in [
11] states their relationships (it is
and
, where
e is the void ratio).
The evolution of the consolidation pressure,
in (
5), is governed by the following law:
where
is the volumetric viscoplastic strain and
is a reference parameter defining the initial value of the consolidation pressure.
Figure 1 shows two contour plots of
in the
plane, the original one and an evolved state. The critical state line of slope
M is also shown in the plot. Equation (
6) shows that the evolution of the plastic potential is independent of the deviatoric component of stress and, together with (
4), defines an associative evolution of the viscoplastic strains. It should be noted that these inelastic strains start to develop whenever
, though, due to the power law in (
5), for common values of the parameters, the growth rate is very small as long as
.
In general, both
G and
K in (
2) are taken to depend on the current pressure state
, and hence on time, through the following relation:
being Poisson’s coefficient.
For the subsequent developments, it is convenient to introduce the projector operators
m and
n defined as:
such that:
Following [
20], the key idea is that, by using
m and
n, the viscoplastic strain rate can be easily decomposed into its volumetric and deviatoric components:
Noting that
,
, and
, the rates of the stress invariants
p and
q can be directly obtained from (
1), (
4), and (
10) as:
In (12), and (and hence, also ) represent tentative values of the stress rates under the assumption of a purely elastic stress variation. In view of the already mentioned absence of a stress threshold for the activation of the viscoplastic strains, a purely elastic stress variation is impossible and, therefore, the trial quantities are purely theoretical.
Equation (
10) implicitly defines the rate of the volumetric viscoplastic strain as:
whose integration is required to compute the evolution of the internal variable
in (
6).
3. Implicit Backward-Difference Time Integration
Let
, with
,
, a time interval along which the constitutive law (
1) has to be integrated. A fully implicit, backward-difference scheme is adopted here, whereby all the quantities are evaluated at the end
of the step, whereas the state of the system is assumed to be completely known at
. In the following derivations, the isotropic elastic tensor
D is considered constant in the time step, as is commonly assumed in the literature; see, e.g., [
20]. Its value will be updated based on Equation (
7) only at the end of the considered time step. An implicit formulation of the algorithm considering also the evolution of
D within the time step would be possible, at the cost however of additional complications in the formulation of the integration scheme and of the consequent increase of the computing time, with little expected improvement of accuracy.
The stress at the end of the step can be expressed as:
where
is the stress value at the end of the step under the theoretical assumption of a purely elastic increment and
is assumed to be a prescribed quantity. The symbol
will be used to denote the finite increments of all quantities between
and
.
From (
10), the increment of viscoplastic strains is expressed as:
Exploiting the well-known property for which
(see
Appendix A), with
, the increment of viscoplastic strains can be written as:
with:
and the notation
is used instead of
. Based on (12), the hydrostatic and deviatoric invariants are in turn written as:
According to the definition (
5) of
, the increments of the volumetric viscoplastic strain (
13) and of the internal variable
(
6) at the end of the step are given by:
Using (
13), one can express the increment of the plastic multiplier as:
and use this expression for the computation of
in (
17).
The local non-linear problem defined by Equations (
16)–(
20) is solved at each Gauss point in an iterative way using the Newton–Raphson method. Once the values
,
in (
18) have been computed, the value of the stress at the end of the step is determined as:
The selected unknowns are collected in the vector
defined as:
whose corresponding residuals are:
For convenience, these can be collected in a residual vector
:
The trial values in (26) and in (27) are given by:
It should be noted that not all residuals explicitly depend on all unknowns, as can be seen below:
Proceeding iteratively with a first-order linearization of the resolving system, at the
-th iteration, one has:
where
defines the residual vector at iteration
i and
is the increment of the unknown variables between two subsequent iterations:
The residual gradient
is a
matrix containing the derivatives of the residuals w.r.t. the unknowns. Its detailed expression is given in
Appendix B. It can be shown that the gradient
is non-symmetric. Consequently, a non-symmetric solver must be used for the local problem, if a consistent tangent matrix is desired to assure an asymptotic quadratic convergence.
4. Consistent Tangent Stiffness
Starting from the known material state at
, a virtual total stress variation
occurring in the infinitesimal time
can be expressed as (since all quantities are evaluated at
, the superscript
is omitted to simplify the notation):
where the term
accounts for the viscous stress relaxation at constant strains. Using (
21), the stress variation
can also be written as:
After reordering, we obtain:
The first term is the contribution to the global tangent matrix to be used in the finite element code (i.e., in an UMAT user subroutine in the software Abaqus™).
The computation of (
39) requires the derivation of
,
, and
in terms of
and
n does not depend on time and its variation with
can be obtained starting from its definition (
8)
:
with:
where
is the deviatoric operator defined as:
Replacing (
41) in (
40) and taking into account that
, one has:
The variations
and
are obtained from (
18) and (
17):
with
given in (
41)
and:
After rearranging, Equation (
44) can be rewritten as:
The computation of
and
in (
44) requires the definition of
. This can be obtained from the expression (
19)
of
:
with:
Replacing (
48)
in (
47), one has:
Rearranging the different terms, Equation (
49) can be rewritten as:
with
From (
47), (
48)
, and (
50), one can write:
and then solve for
:
The present expression of
can be replaced in (
46), obtaining (after some algebra) the following system of equations in the unknown variations
and
:
with:
The system (
55) can be solved analytically for
and
:
where the terms
,
,
,
are the coefficients of the matrix
, namely:
Rearranging (
57), one obtains:
Replacing the obtained expressions of
(
43),
(
59)
, and
(
59)
in (
37), one finally obtains the explicit expression of the tangent matrix:
The term inside the curly brackets in (
60) is the partial derivative of the stress with respect to time, i.e.,
. The stress variation in (
60) consists of two contributions. The first,
, is the tangent stiffness operator to be used for the predictor step in the global Newton–Raphson iteration scheme. This is the term that is required by Abaqus™ to be computed at each Gauss point in a User Material subroutine and to be passed to the code for global iteration. The second term,
, accounts for the stress relaxation at constant strain and does not have to be passed to Abaqus™ by the User Material subroutine. However, it has to be properly taken into account for the validation of the tangent stiffness operator, as will be discussed in the next section.
It should be noted that the tangent stiffness operator
in (
60) is not symmetric. However, it can be shown that the coefficients
and
of the non-symmetric part in (
60) vanish for vanishing
, a result in agreement with the findings in [
20].
The implemented procedure is summarized in Algorithms 1–4.
| Algorithm 1: Implicit backward difference time integration. |
Initialization
Solve Newton–Raphson linear System (35) to obtain , Equation (21)
Compute tangent matrix , Equation (60)
|
| Algorithm 2: Initialization. |
At time step n, from to , all quantities at time are known.
Given , compute .
, , , and from Equations (8) and (29).
Initial (trial) values for derivatives of are then known from Equation (A10).
|
| Algorithm 3: Solve Newton–Raphson linear System (35) to obtain . |
| At iteration i, if , use trial values for quantities. |
| Compute residuals for the linearized system (35) with Equations (23)–(27). |
| Compute the coefficient matrix for the linearized system (35) with Equations (A11)–(A13). |
| Solve linearized System (35) for the unknowns in Equation (36). |
| Update . |
| Convergence test: if passed, , and exit loop. Else, repeat from 1 with and . |
| Algorithm 4: Compute tangent matrix , Equation (60). |
| Update at : with Equation (5); derivatives of with |
| Equation (A10); , with Equation (7); with Equation (19). |
| Compute B and A from Equations (51) and (52), respectively. |
| Compute with Equation (56), and the coefficients with Equation (58). |
| Compute the tangent stiffness matrix with Equation (60), here rewritten for clarity |
| (all quantities are calculated at , if not indicated otherwise): |
| |
|
6. Conclusions
A rigorous implicit backward Euler integration of the viscoplastic model proposed by [
11] was presented. Even though several different implementations of this model have been proposed in the literature, including explicit and semi-implicit time integrations, a fully implicit and rigorous backward Euler implementation was still missing, with the notable exception of [
15], where, however, the analytical expression of the consistent tangent matrix was not provided. In this work, besides a comprehensive description of the implicit integration formulation, the analytical derivation of the consistent unsymmetric tangent stiffness matrix for the V-N model was described in detail, together with its validation strategy.
The derived model was implemented as a user-defined material subroutine in the commercial finite element code Abaqus™ Standard. The expected advantages of the implicit formulation in terms of robustness with respect to an explicit formulation were assessed and validated by means of numerical tests carried out both at the material point level and at the reservoir scale. A strategy for the numerical validation of the consistent tangent matrix was described in detail and implemented, confirming the correctness of its analytical derivation.
Finally, the performances of an implementation with a consistent tangent matrix were assessed in comparison with those obtained with the same implicit integration coupled to a symmetrized tangent matrix, as in [
15], confirming the superiority of the first with respect to the latter in terms of the number of iterations to convergence and of global computing time. Furthermore, the overall better performance of a fully consistent Newton–Raphson scheme with respect to its quasi-Newton counterpart was also demonstrated.


 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}