
Modification of Segment Structure Calculation Theory and Development and Application of Integrated Software for a Shield Tunnel

Abstract
:Featured Application
Abstract
1. Introduction
2. Calculation Theory Revision
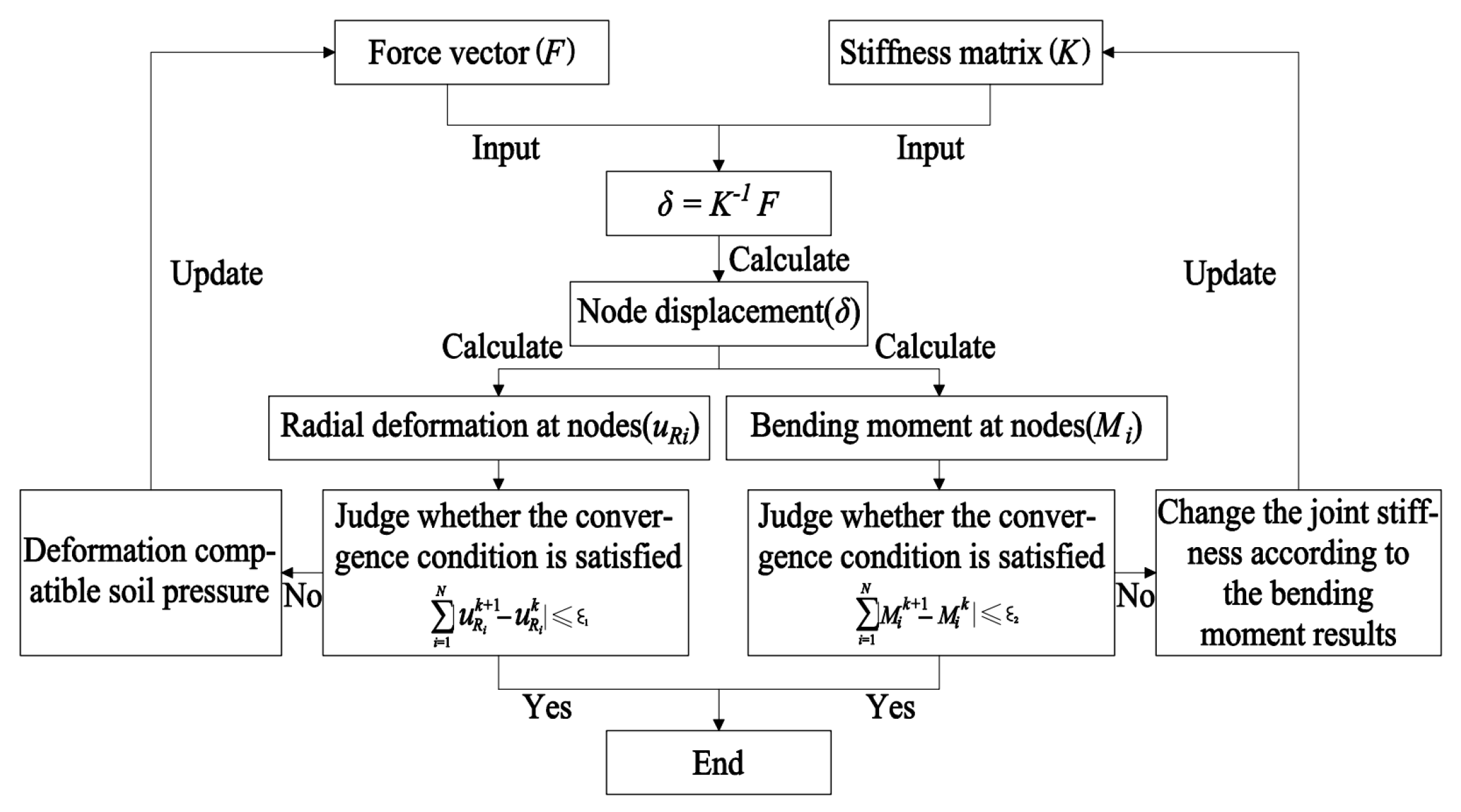
2.1. Beam–Spring Method
2.1.1. Apply the Vertical Distributed Forces
2.1.2. Apply the Horizontal Distributed Forces
2.1.3. Overall Stiffness Matrix Assembly
2.2. Modified Routine Method
3. Integrated Software System Development
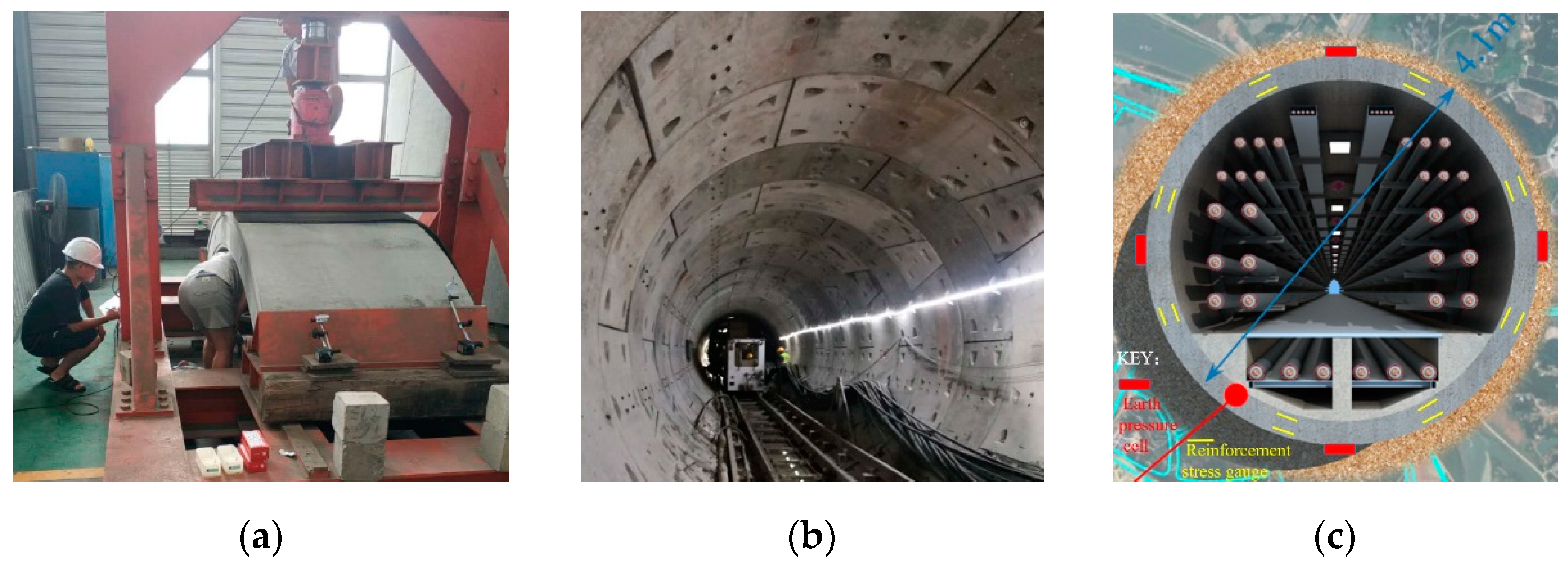
4. Calculation and Verification of a Shield Tunnel in Changsha
4.1. Model Input Parameters
- (1)
- The full ring of the lining ring is composed of a small capping block (K), two adjacent blocks (L), and three standard blocks (B). Each segment is connected by bending bolts;
- (2)
- Staggered stitch is used between the rings;
- (3)
- The minimum curve radius that can be fitted to the lining ring of R = 150 m;
- (4)
- Design each segment and the segmented reinforcement with different buried depths or different rock(soil)properties, respectively.
4.2. Analysis of Calculation Results
5. Conclusions
- The calculation program based on the beam–spring method evaluating the joint effect between the segments and the discontinuous displacement between the beam and the joint can reasonably evaluate the staggered assembly of the shield tunnel segments, which is more reasonable than the beam–joint strain continuous assumption model in the mechanical behavior between segments. Through the development of the calculation program by setting analytical conditions, the joint spring stiffness can be determined reasonably, and the rationality and accuracy of the calculation of the segment structure are improved;
- The reasonable value of the stiffness reduction coefficient in the modified routine method is obtained through the inversion of the field measured data and the calculation results of the beam–spring model. A large number of software calculation results were compared with the measured data, which shows that the modified routine method calculation module of the software has high accuracy in the calculation of segment bending moment;
- The calculation parameters of shield tunnels with different cross-section diameters should be further studied with variables of hydrogeological parameters and the segment diameters. The current research shows that for shield tunnels with different segment diameters adopting recommended bending stiffness reduction coefficient for different parts of the lining ring could provide significant reference value in numerical calculation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Murakami, H.; Koizumi, A. Study on load bearing eapacity and mechanics of shield segment ring. Proc. Jpn. Soc. Civ. Eng. 1978, 272, 103–115. [Google Scholar] [CrossRef] [Green Version]
- Huang, Q.F.; Yuan, D.J.; Wang, M.S. Influence of water level on internal force of segments of shieldtunnels. Chin. J. Geotech. Eng. 2008, 30, 1112–1120. [Google Scholar]
- Zhang, M.C. Analysis of lining segments for circular shield tunnels. Mod. Tunn. Technol. 2009, 46, 23–27. [Google Scholar]
- Peng, Y.C.; Ding, W.Q.; Yan, Z.G. Analysis and calculation method of effective bending rigidity ratio in modified routine method. Chin. J. Geotech. Eng. 2013, 35 (Suppl. S1), 1496–1500. [Google Scholar]
- Zhu, H.H.; Cui, M.Y.; Yang, J.S. Design model for shield lining segments and distribution of load. Chin. J. Geotech. Eng. 2000, 22, 190–194. [Google Scholar]
- Zhu, W.; Zhong, X.C.; Qin, J.S. Mechanical analysis of segment joint of shield tunnel and research on bilinear joint stiffness model. Rock Soil Mech. 2006, 27, 2154–2158. [Google Scholar]
- Wu, Q.L.; Wang, M.S.; Dong, X.P. Study onnonlinear rotational stiffness of shield segment joint. China Civ. Eng. J. 2014, 47, 109–114. [Google Scholar]
- Bo, T.J.; Morten, F.; Thoma, K. Amodelling approach for joint rotations of segmental concrete tunnel lining. Tunn. Undergr. Space Technol. 2017, 67, 61–67. [Google Scholar]
- Huang, H.W.; Xu, L.; Yan, J.L.; Yu, Z.K. Study on transverse effective rigidity ratio of shield tunnels. Chin. J. Geotech. Eng. 2008, 28, 11–18. [Google Scholar]
- He, C.; Zhang, J.G.; Yang, Z. Model test study on the mechanical characteristics of segment lining for the Wuhan Yangtze River tunne. China Civ. Eng. J. 2008, 41, 85–90. [Google Scholar]
- Ju, Y.; Xu, G.Q.; Mao, L.T.; Duan, Q.Q.; Zhao, T.S. 3D numerical simulation of stress and strain properties of concrete shield tunnel lining and modeling experiments. Eng. Mech. 2005, 22, 157–165. [Google Scholar]
- Zhu, H.H.; Huang, B.Q.; Li, X.J.; Hashimoto, T. Unified model for internal force and deformation of shield segment joints and experimental analysis. Chin. J. Geotech. Eng. 2014, 36, 2153–2160. [Google Scholar]
- Zhu, H.H.; Tao, L.B. Study on two beam-spring models for the numerical analysis of segments in shield tunnel. Rock Soil Mech. 1998, 19, 26–32. [Google Scholar]
- Dong, X.P. Incremental analytical solution for failure history of a single ring of segmented tunnel lining. Chin. J. Geotech. Eng. 2015, 37, 119–125. [Google Scholar]
- Huang, C.F. Analysis and computation on universal assembling segment lining for shield tunnel. Rock Soil Mech. 2003, 25, 322–325. [Google Scholar]
- Zhang, H.M.; Guo, C.; Fu, D.M. A study on the stiffness model of circular tunnel prefabricated lining. Chin. J. Geotech. Eng. 2000, 22, 309–313. [Google Scholar]
- Zeng, D.Y.; He, C. Study on factors influential in metro shield tunnel segment joint bending stiffness. J. China Railw. Soc. 2005, 27, 90–95. [Google Scholar]
- Zhou, M.; Fang, Q.; Peng, C. A mortar segment-to-segment contact method for stabilized total-Lagrangian smoothed particle hydrodynamics. Appl. Math. Model. 2022, 107, 20–38. [Google Scholar] [CrossRef]
- Fang, Q.; Wang, G.; Yu, F.; Du, J. Analytical algorithm for longitudinal deformation profile of a deep tunnel. J. Rock Mech. Geotech. Eng. 2021, 13, 845–854. [Google Scholar] [CrossRef]
- Zhu, H.H.; Zhou, L.; Zhu, J.W. Beam-Spring Generalize-d Model for Segmental Lining and Simulation of its No-nlinear Rotation. Chin. J. Geotech. Eng. 2019, 41, 7–16. [Google Scholar]
- Zhang, W.; De Corte, W.; Liu, X.; Taerwe, L. Influence of Rotational Stiffness Modeling on the Joint Behavior of Quasi-Rectangular Shield Tunnel Linings. Appl. Sci. 2020, 10, 8396. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Parameter |
|---|---|
| Diameter | Out D φ4100 mm, Inner D φ3600 mm |
| Lining ring block | 6 (17° × 1 + 63.5° × 2 + 72° × 3) |
| Lining thickness | 250 mm |
| Lining ring width | 1000 mm (150 m ≤ R < 300 m) 1200 mm (R ≥ 300 m and Straight) |
| Wedge | 36 mm (150 m ≤ R < 300 m) 40 mm (R ≥ 300 m and Straight) |
| Interface | Nitrile Cork Rubber with 2 mm thickness |
| Material | C50, Impermeability grade P12 |
| On-Site | Modified Routine Method | Beam–Spring (Discontinuous) | Beam–Spring (Continuous) | |
|---|---|---|---|---|
| Max bending moment (kN m) | 34.7 | 32.7 | 39.9 | 45.2 |
| Axial Force (kN) | 367 | 319 | 389 | 412 |
| Error of bending moment | −6.12% | +15.0% | +30.3% | |
| Error of Axial Force | −15.0% | +6.05% | +12.3% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Q.; Liu, S.; Lv, Y.; Ji, D.; Li, P. Modification of Segment Structure Calculation Theory and Development and Application of Integrated Software for a Shield Tunnel. Appl. Sci. 2022, 12, 6043. https://0-doi-org.brum.beds.ac.uk/10.3390/app12126043
Huang Q, Liu S, Lv Y, Ji D, Li P. Modification of Segment Structure Calculation Theory and Development and Application of Integrated Software for a Shield Tunnel. Applied Sciences. 2022; 12(12):6043. https://0-doi-org.brum.beds.ac.uk/10.3390/app12126043
Chicago/Turabian StyleHuang, Qingfei, Shaopeng Liu, Yonggang Lv, Daxue Ji, and Pengfei Li. 2022. "Modification of Segment Structure Calculation Theory and Development and Application of Integrated Software for a Shield Tunnel" Applied Sciences 12, no. 12: 6043. https://0-doi-org.brum.beds.ac.uk/10.3390/app12126043