
Research on Image Matching of Improved SIFT Algorithm Based on Stability Factor and Feature Descriptor Simplification


School of Information Science and Engineering, Northeastern University, Shenyang 110819, China
*
Author to whom correspondence should be addressed.
Appl. Sci. 2022, 12(17), 8448; https://0-doi-org.brum.beds.ac.uk/10.3390/app12178448
Submission received: 7 July 2022
/
Revised: 15 August 2022
/
Accepted: 18 August 2022
/
Published: 24 August 2022
(This article belongs to the Collection Advances in Image Processing, Analysis and Recognition Technology)
Abstract
:In view of the problems of long matching time and the high-dimension and high-matching rate errors of traditional scale-invariant feature transformation (SIFT) feature descriptors, this paper proposes an improved SIFT algorithm with an added stability factor for image feature matching. First of all, the stability factor was increased during construction of the scale space to eliminate matching points of unstable points, speed up image processing and reduce the dimension and the amount of calculation. Finally, the algorithm was experimentally verified and showed excellent results in experiments on two data sets. Compared to other algorithms, the results showed that the algorithm proposed in this paper improved SIFT algorithm efficiency, shortened image-processing time, and reduced algorithm error.
1. Introduction
Image matching [1,2] is one of the important research contents in computer vision and image processing, and is widely used in visual 3D reconstruction [3], tracking [4], object recognition [5] and content-based image retrieval [6]. Its purpose is to find one or more transformations in the transformation space so that two or more images of the same scene from different times, different sensors or different perspectives are spatially consistent. There are many types of image matching methods, among which feature-based matching has better robustness to image distortion, noise and occlusion. However, this matching depends to a large extent on the quality of feature extraction. One of the research hotspots is pattern recognition [7,8,9,10]. The most basic one is the scale-invariant feature transform (SIFT) algorithm proposed by Lowe in 2004 [11,12]. However, it only considers the Euclidean distance between the feature vectors when matching, and does not use any structural information contained in the dataset itself; therefore, the search efficiency is relatively low. When the image noise or the difference between matching objects is large, the mismatching situation is obvious. To solve this problem, Ooi and Weinberger proposed using a Kd tree to divide the space and then perform a nearest neighbor query [13,14], but this means of establishing an index structure carries a relatively high cost. Chen and Torr proposed the M estimation method [15] and the maximum likelihood estimation by sample and consensus (MLESAC) [16] algorithm to estimate the matching matrix. The M estimation method relies completely on the linear least squares method, so the initial value of the estimated matrix low accuracy and poor stability; the MLESAC algorithm is incapable of modeling outliers and has low estimation accuracy. In response to these problems, Choi proposed a better performance random sample consensus (RANSAC) algorithm [17] to purify the matching pairs consistently. Since RANSAC depends on the setting of the number of iterations, the results have errors and may not be optimal. At present, researchers have proposed a variety of description methods for local feature regions of images, such as descriptors based on Gaussian differentiation, invariant moments, controllable filters, time-frequency, pixel gray value distribution or pixel gradient value distribution. Of these methods, the most concerned is Lowe’s SIFT descriptor.
The construction of this feature descriptor is achieved by establishing a three-dimensional gradient directional histogram for the neighborhood of feature points. The SIFT feature is not only invariant to the scale change and rotation of the image, but also has strong adaptability to the illumination change and image deformation and has a high discrimination ability. On this basis, researchers have improved and extended SIFT features, such as the PCA-SIFT descriptor proposed by Ke and Sukthankar [18], and the Gradient location-orientation histogram (GLOH) descriptor proposed by Mikolajczyk and Schmid [19], the Rotation-invariant feature transform (RIFT) descriptor proposed by Lazebnik [20] and the Speeded up robust features (SURF) descriptor proposed by Bay [21].
In the literature, [22] the performance of descriptors similar to SIFT was found to be the best after evaluating the performance of many representative descriptors. Local binary pattern (LBP) is one of the more effective texture analysis features for two-dimensional images [23]. It is essentially a texture descriptor based on pixel gray order that uses local patterns as texture primitives for analysis.
It has the characteristics of simple calculation and invariance to linear illumination changes, and has been widely used in face recognition, background extraction and image retrieval [24,25,26,27]. Reference [28] was the first to apply an LBP operator to the construction of local image feature descriptors, and proposed a Centersymmetric local binary pattern (CS-LBP) local image feature area description method. Experimental results showed that the CS-LBP descriptor has better image matching than the SIFT descriptor and has obvious storage advantages since the SIFT has color space requirements and computational overhead.
Tan and Triggs extended the LBP operator to a ternary code and proposed a Local trinary pattern (LTP) operator [29]. The LTP feature has stronger discrimination than the LBP feature, but its histogram dimension is greatly increased, which is not suitable for directly describing the local feature area of the image. Extending the CS-LBP descriptor directly to the Center symmetric local trinary pattern (CS-LTP) descriptor reduces the dimensionality of the descriptor to a certain extent, but it still cannot meet the needs of practical applications.
There are many derivatives algorithms based on the SIFT algorithm: the GLOH, proposed by Mikolajczyk [30]; the CSIFT, proposed by AbdelHakim [31]; the ASIFT, proposed by Morel [32]; the simplified SSIFT proposed by Liu Li [33]; the PSIFT proposed by Cai Guorong [34]; local feature description based on Laplace, proposed by Tang Yonghe [35]; and image matching based on the adaptive redundant keypoint elimination method in the SIFT [36], the efficiency of SIFT still has a lot of room for improvement.
To address the SIFT algorithm’s poor real-time performance, this paper first changed the scale space calculation method and then added a stability factor to reduce the matching error and calculation time; then, by establishing the feature descriptor of the cross-shaped partition, the dimension of the descriptor was reduced from 128 to 96, which reduced the amount of matching calculation and shortened the matching time.
2. Original SIFT Algorithm
The traditional SIFT algorithm is divided into four parts: scale space extreme value detection, key localization, orientation determination, and key point description.
2.1. Scale Space Extreme Value Detection
Potentially sensitive points that are invariant to scale and rotation are identified using differential Gaussian functions. The scale space of the image is mainly obtained by convolving the Gaussian differential function and the original image, as shown in Equations (1) and (2) [12]:
where is is the scale space function, and is the Gaussian blur function. is the original image function, where are the image pixel coordinates; is the spatial scale; and is the image dimension.
The difference of Gaussian (DoG) detection was used to find the space extremum detection, as shown in Equation (3):
In the equation, k is the multiplication factor, and S is the integer number [36]. The value of k is shown in Formula (4):
The key points composed of local extreme points in the DoG space are initially detected by comparing the images of two adjacent layers of each DoG space in the same group. In order to find the extreme point in DoG space, each pixel is compared with all its neighbors to see if it is larger or smaller than its neighbors in the image domain and scale domain. As shown in Figure 1, the detection point in the middle (the “X” in the picture) is compared with its 8 adjacent points of the same scale and the 9 × 2 points corresponding to the upper and lower adjacent scales, a total of 26 points, to ensure that extreme points are detected in both scale space and 2D image space.
2.2. Key Point Positioning
The extreme point in the discrete space is not the real extreme point. The method of using known discrete space point interpolation to obtain the continuous space extreme point is called sub-pixel interpolation.
To improve the stability of key points, curve fitting was performed on the scale-space DoG function. Using the Taylor expansion of the function in the scale space:
In the formula, the key points obtained by generated a strong edge response, so the unstable edge response points needed to be eliminated so that the threshold could be set.
2.3. Direction Determination
After the key points were found, considering that they are in the scale space, it was necessary to use local image features to assign a reference direction to all key points so that the descriptor had rotation invariance. Therefore, the image gradient method was used to obtain the stable direction of the local structure. The magnitude and direction of the gradient are shown in Equations (6) and (7):
where is the gradient value; L is the scale space value where the key point is located; and is the gradient direction. The histogram was used to count the gradient directions of the key point in a certain neighborhood, find the direction corresponding to the highest histogram peak and then use it as the main direction of the key point.
2.4. Description of Key Points
Three pieces of information were obtained from the above: position, scale, and orientation. A descriptor was then established for each key point, and a set of vectors was used to describe the key point so that it did not change because of changes in lighting or perspective. This descriptor included not only the key points, but also the pixels around the key points that affected it. At the same time, the descriptor had to have uniqueness to improve the probability of correctly matching of feature points. The generation of keypoint descriptors is shown in Figure 2. The red dots in Figure 2 represent feature points. First, a square pixel area of a 16 × 16 grid was selected around the feature points; second, the 4 × 4 grid was divided; finally, the cumulative gradient values of 8 directions (one direction every 45 degrees) were calculated in each sub-region, and each feature point generated a 4 × 4 × 8 (128) dimensional feature descriptor.
As above, the 4 × 4 × 8 = 128 gradient information was the feature vector of the key point. To remove the influence of illumination changes after the eigenvectors were formed, they had to be normalized. The normalized eigenvectors are shown in Formula (8):
where is the normalized vector; is the original feature vector; and . Larger gradient values were truncated by setting the threshold value. After that, a normalization process was performed to improve the discrimination of the features.
3. Improved SIFT Algorithm
To address the low real-time performance of the SIFT algorithm, two innovations were proposed in this paper: increase the stability factor in the scale space and simplify the feature descriptor. This section describes these improvements.
3.1. Scale Space Increases the Stability Factor
The traditional scale space construction formula is
where is the scale space coordinate; O is the number of octaves; S is the number of layers in the group; is the scale of the reference layer; o is the index of the octave of the group; and s is the index of the layer in the group.
When building the Gaussian pyramid at the beginning, the input image should be pre-blurred as the image of the 0th layer of the 0th group, which is equivalent to discarding the highest sampling rate of the spatial domain. Therefore, the usual practice is to double the scale of the image to generate the −1 group. Apply a Gaussian blur of to it, if the size of the input image is doubled with bilinear interpolation, then it is equivalent .
When constructing a Gaussian pyramid, the scale coordinates of each layer in the group are calculated as follows:
The value of k is shown in Formula (4).
To reduce error and matching time, a stabilizer P is added, and then a new Gaussian pyramid is constructed. The scale coordinates of each layer in the group are calculated as follows:
Definition 1.
Stabilizer factor P
To reduce error and matching time, the stabilizer P is added, where . The stabilizer factor P is shown in Equation (12):
Proof.
Because the number under the square root of formula (11) is greater than or equal to 0:
According to [36], , so
According to , so
Since the value of ,
According to [36], usually , so
and because we want to remove redundant feature points, if , then .
Since k is a decreasing function, so must w be; k is also an exponential function. To facilitate the derivation, P was designed as an exponential function as follows:
To ensure that P is a decreasing function, let . When S is infinite, . To ensure that the value of P can remove redundant points, let because , needs to meet . Usually , so
Let to ensure that the filtering window and feature points are not too small.
Therefore, . □
3.2. Simplified Feature Descriptor
In the original SIFT algorithm, there were 128 high-dimensional feature descriptors and redundant data. The computational complexity of computing the feature descriptor is
where represents the time complexity of the corresponding algorithm; represents the number of feature points; and represent the dimension of the feature descriptor; n represents the number of iterations of the algorithm; and represents the Gaussian scale. The time complexity of the 128 dimensions is
The higher the dimension of the feature descriptor, the higher the time complexity. Therefore, this article simplified the descriptor. The specific division of the simplified descriptor is shown in Figure 3, the red dots in Figure 3 represent feature points. Compared with the square area divided by the SIFT algorithm, the grid pixels with 4 corners were discarded. The basis for this was that the smaller the distance between the pixel and the feature point, the smaller the contribution to the matching. The the weight distribution of the descriptor data was in line with the Gaussian kernel, so the pixel information that was far away and had little influence on the matching effect was discarded. Therefore, obtaining a 3 × 4 × 8 (96)-dimensional feature descriptor reduced the descriptor dimension of the original SIFT algorithm by 25%. The time complexity of 96 dimensions is
so the consumption time was shortened, and the computational complexity and amount of computation of the algorithm was reduced. Although a small amount of feature information in the corners was discarded, the uniqueness of the descriptor improved, and the matching of feature points with the same name was faster and more stable.
If is a 96-dimensional feature descriptor of a feature point, it needs to be normalized to remove the influence of illumination changes.
4. Experimental Results and Analysis
4.1. Experimental Environment
To show the adaptability of this algorithm to different types of datasets, two different types were selected: The first was the kitti dataset, which is used in unmanned driving, which is closer to the real perspective of mobile robots and unmanned vehicles, and it is close to life scenes. The second was the Euroc dataset, which is collected in the factory environment, close to the industrial scene. The kitti dataset contained 20 sets of pictures, the pixel size of which was 1242 × 375. The Euroc dataset contained 20 pictures, the pixel size of which were 752 × 480. The purpose of selecting these two datasets was to show the effect of the algorithm in this paper on life and industrial scenes. It had good authenticity.
The experimental equipment in this paper was a Legion Y7000p laptop, equipped with an Inte(R) Core(TM) i7-10750H CPU, a frequency of 2.6 GHz, and 16 G of memory. The programming platform was VS2019; the language was C++; and the operating system was 64-bit Windows 10.
4.2. Comparison of Experimental Results
4.2.1. Comparison of Experimental Results Based on Kitti Dataset
Indicator description: RN represented the number of reference image feature points; WN: the number of image feature points to be matched; MN: the number of matching points; PT: the matching time; and rems represented the rems error.
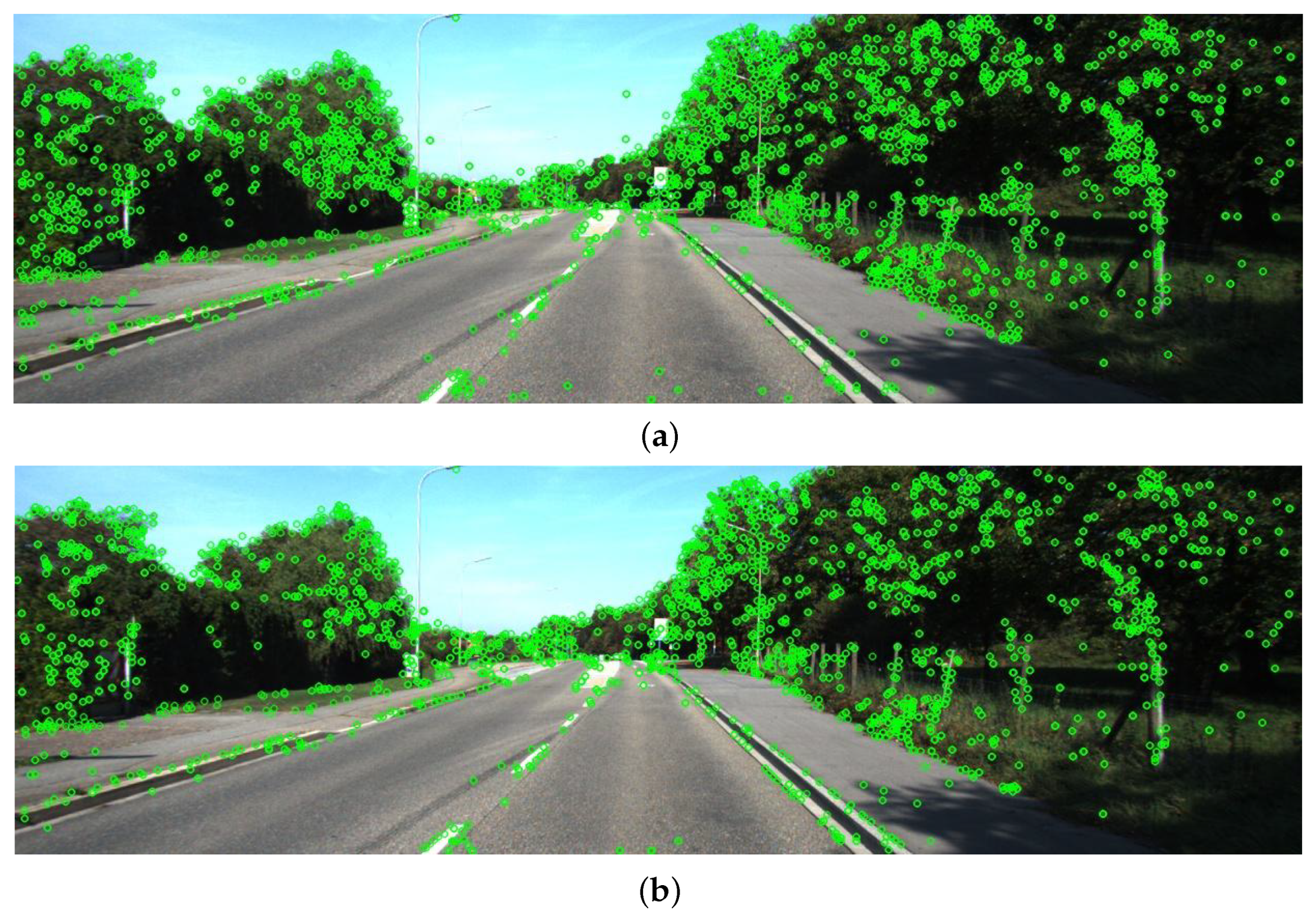
First, the Kitti dataset was used, and the feature point extraction results of a group of pictures were randomly selected for display. These included reference images and images to be registered. The serial number in the dataset was 17). The feature-point extraction results of the SIFT algorithm of the reference image and the algorithm of this paper are shown in Figure 4; the results of the SIFT algorithm of the image to be registered and the algorithm of this paper are shown in Figure 5. Of these, Figure 4a and Figure 5a are the feature points extracted by the SIFT algorithm, and Figure 4b and Figure 5b are those extracted by the algorithm in this paper, which increased the stability factor and simplified the description. The number of feature points obtained by the algorithm was reduced Figure 4a. The number of feature points extracted by the SIFT algorithm was 6203. After optimization by the algorithm in this paper, the number of feature points in Figure 4b was 4725. The number of features extracted by the SIFT algorithm in Figure 5a was 4348, and the number optimized by the algorithm in this paper was 3429. From Figure 4 and Figure 5, the feature points extracted by the algorithm were also sparser than those of the SIFT algorithm, which proved the role of the stability factor.
The matching results of the reference image and the image to be registered are shown in Figure 6, and the matching results of the SIFT algorithm are shown in Figure 6a. The matching time of the SIFT algorithm was 3.284 s with a root mean square error of 0.153. Using the feature descriptor to remove the four-corner rectangular area made the feature description ability faster and eliminated some less ideal matching point pairs. The matching results of the optimized algorithm are shown in Figure 6b. The matching time of the algorithm was 2.63 s, with a root mean square error of 0.122, which proved the advantage of this algorithm in this group of pictures.
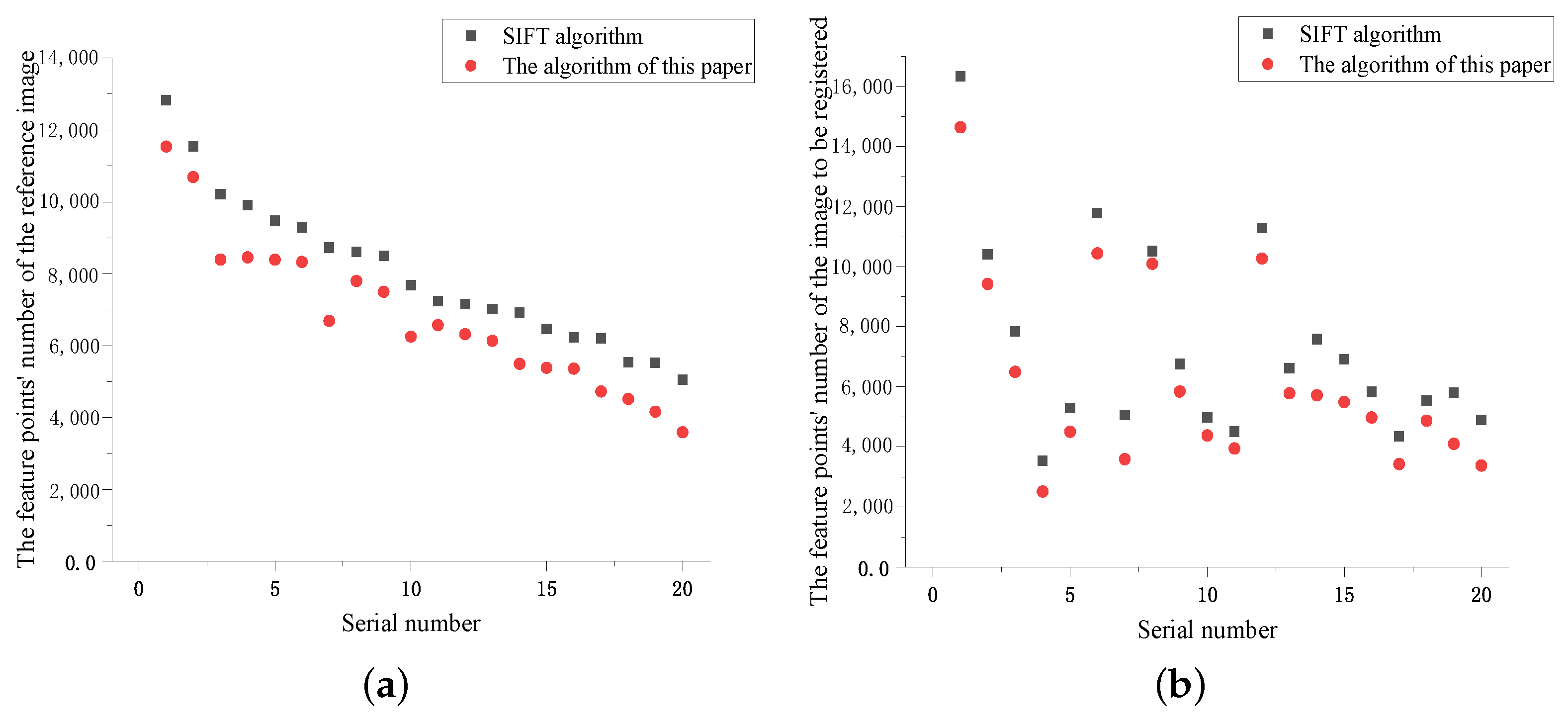
The specific experimental data of the Kitti dataset is displayed in Table 1, and Figure 7 is a comparison diagram of the corresponding experimental results. Figure 7a,b, shows that the algorithm in this paper increased the stability factor when constructing the scale space compared with the SIFT algorithm. Feature points were fewer and more robust, and the algorithm running time was reduced, as shown in Figure 7c. The accuracy of image matching increased and the error decreased, as shown in Figure 7d, proving the superiority of this algorithm over the SIFT.
4.2.2. Comparison of Experimental Results Based on the Euroc Dataset
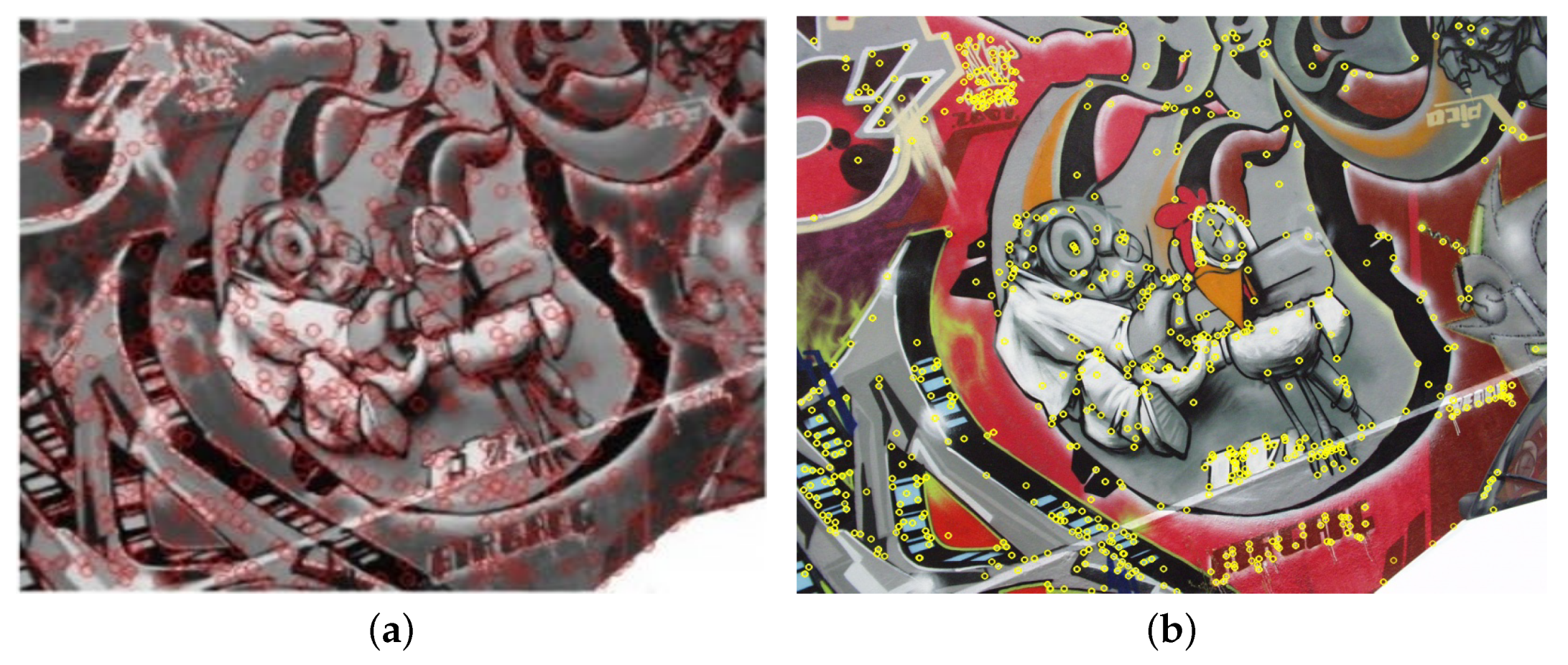
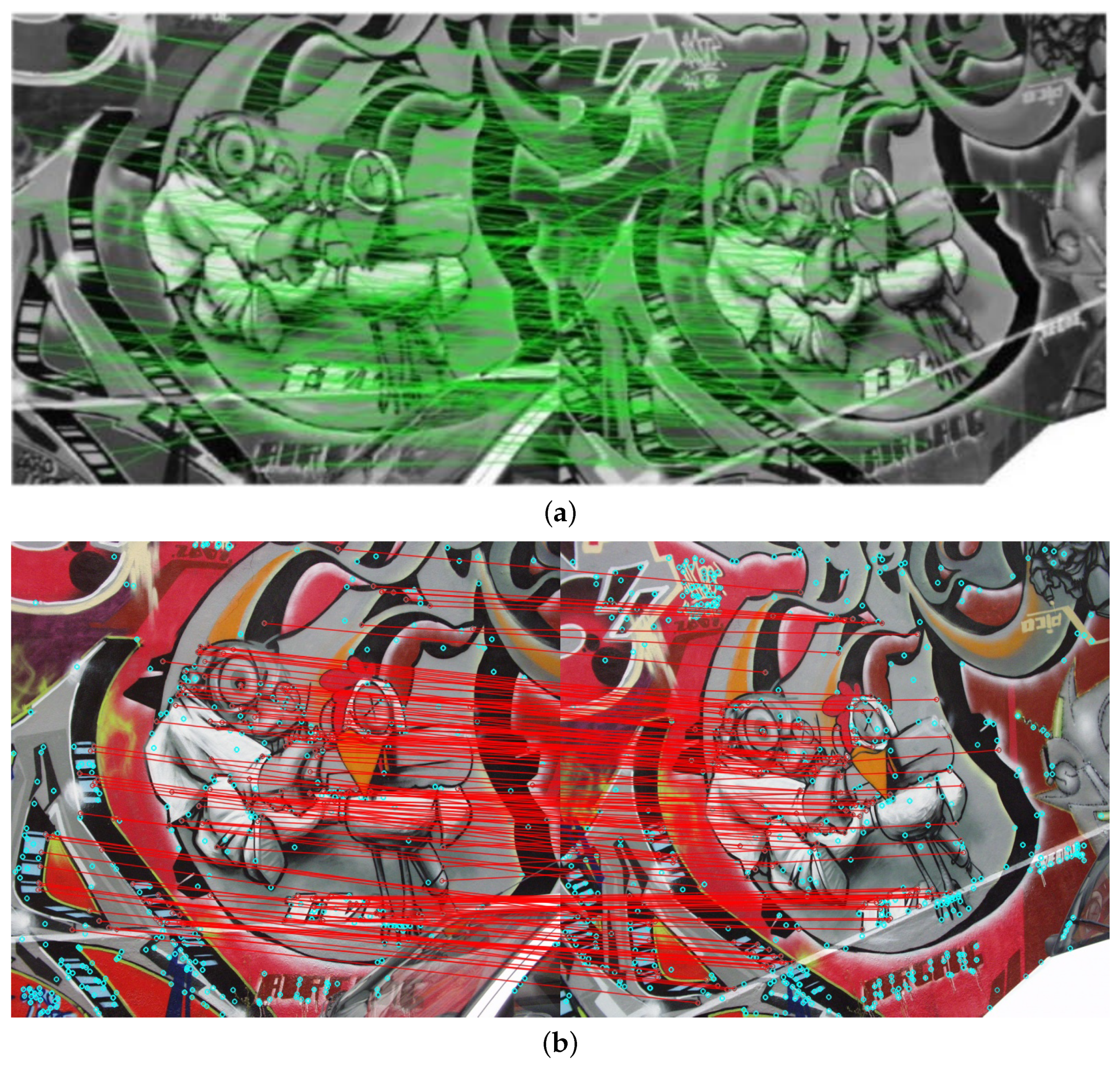
To avoid the contingency of the experiment, the Euroc dataset was also used to verify the algorithm in this paper. One group was randomly selected from the 20 groups of images in the dataset for display. The feature point extraction result of the reference image and of the image to be compared are shown in Figure 8 and Figure 9. After the optimization of the algorithm in this paper, the number of feature points of the reference image was reduced from 4649 to 3662, and the number of points decreased from 4308 to 3383. The matching results are shown in Figure 10. The running time of the SIFT algorithm corresponding to Figure 10a is 4.354 s; the running time of the algorithm in Figure 10b was 3.224 s, a reduction of 26.0%. The rems error dropped from 0.071 to 0.057.
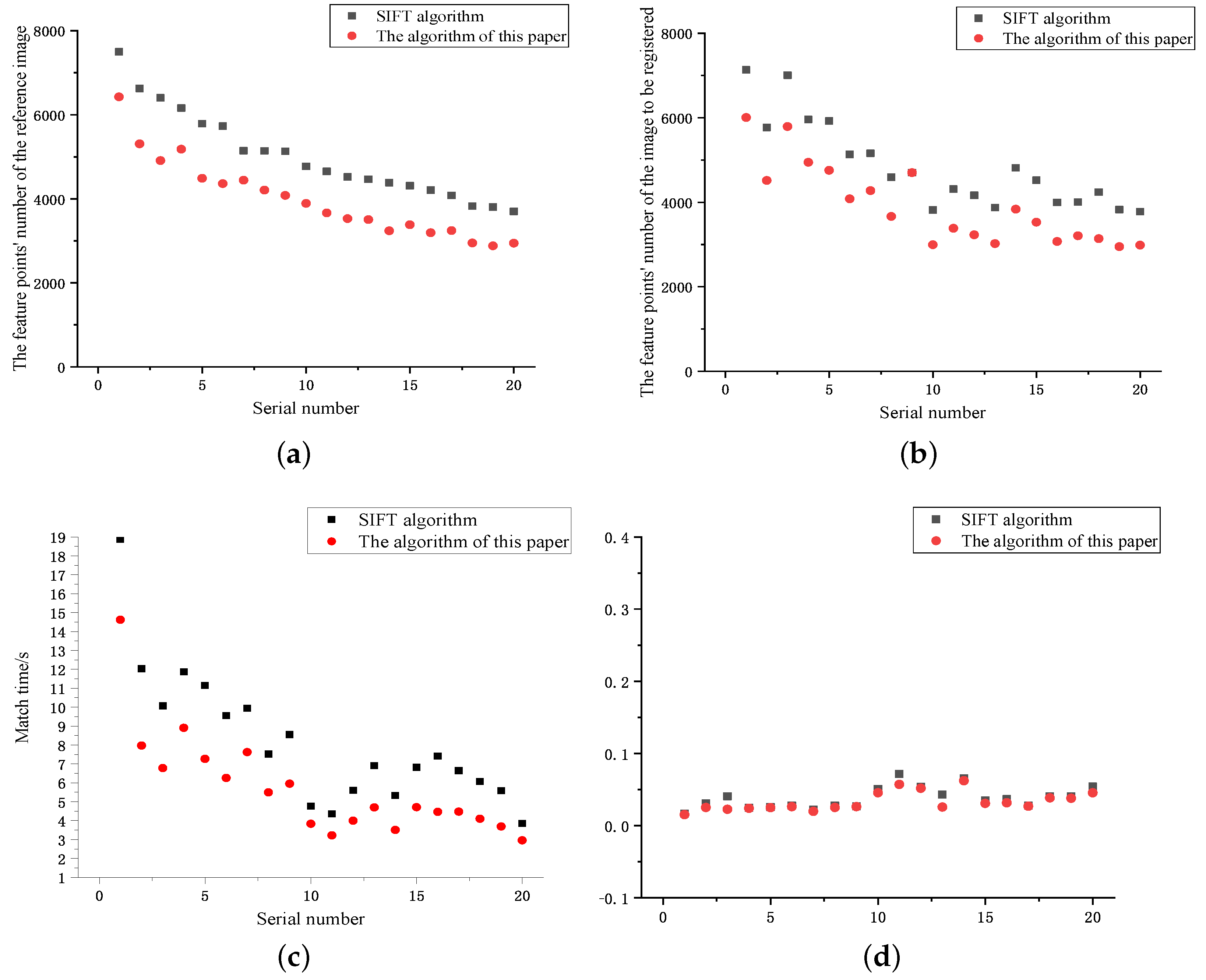
The specific experimental data of the kitti dataset is displayed in Table 2, and Figure 11 is a comparison diagram of the corresponding experimental results. Figure 11a,b compares the number of feature points of the reference image and the image to be compared. Compared with the SIFT algorithm, the number of feature points was greatly reduced, with an average reduction ratio of 20.4 and 19.3%, respectively. Figure 11c shows the comparison results of the image matching time, which was reduced on average by 30.0% compared with the SIFT algorithm; Figure 11d shows that the error comparison results of rems, decreased by 12.7%. The results on the Euroc dataset also demonstrated the advantages of our algorithm in matching time and error.
4.3. Comparison with Other Algorithms
To prove the advantage and significance of the algorithm proposed in this paper, this section compares its the experimental results with a state-of-the-art algorithm in the same dataset (three sets of datasets in Reference [36]). The comparison results are shown in Figure 12, Figure 13, Figure 14, Figure 15, Figure 16, Figure 17, Figure 18, Figure 19 and Figure 20.
Explanation of the meaning of the indicators in the Table 3, Table 4 and Table 5: MN: number of matching points; FT: Feature extraction time (s); PT: match time; ST: total time.
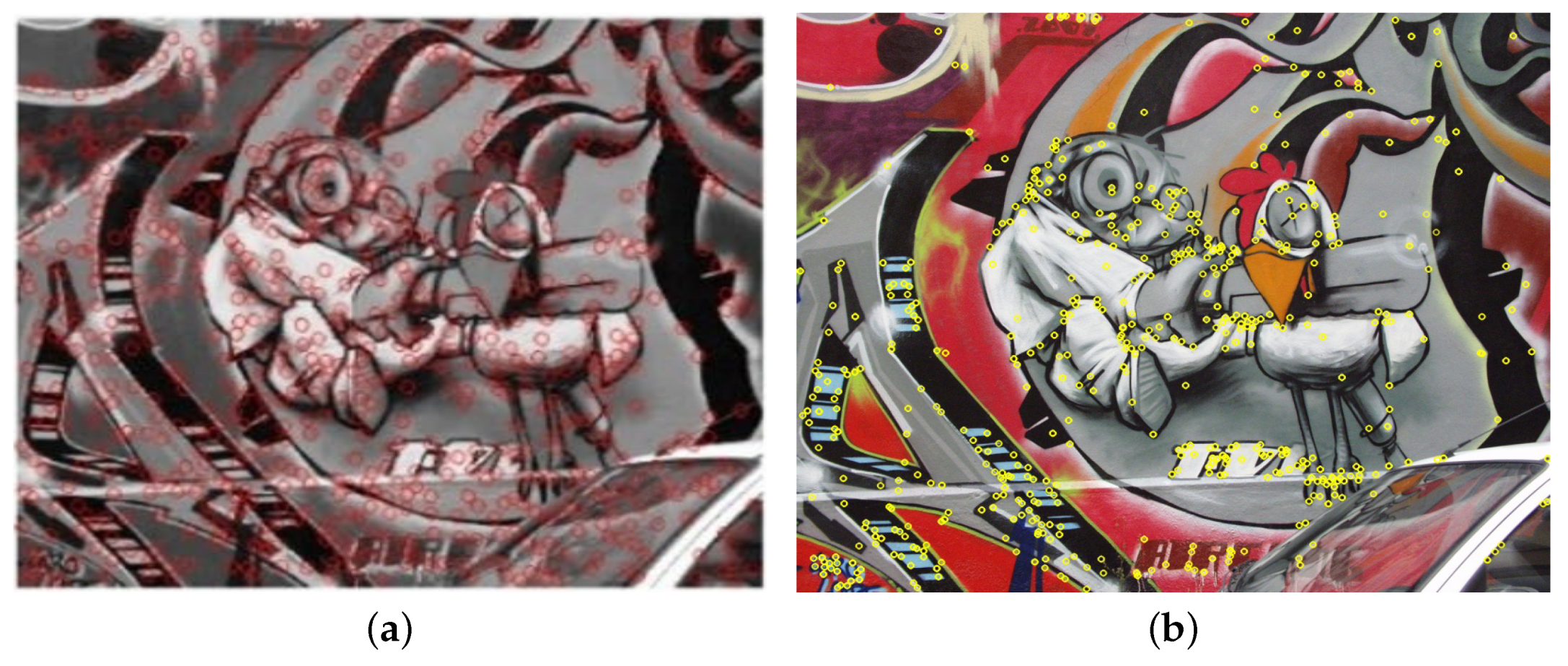
The first set is of images of different affine distortions. The detection results of the reference image feature points, the feature points of the image to be registered, and the image matching results from the adaptive SIFT algorithm and the algorithm in this paper are shown in Figure 12, Figure 13 and Figure 14. The specific data are shown in Table 3. It can be seen from the results that the algorithm in this paper had fewer matching points. The feature-point extraction and matching times as well as total time were all reduced.
The second set is of images of different scales. The detection results of reference image feature points and image feature points to be registered and the adaptive SIFT algorithm and the image matching results obtained by the algorithm in this paper are shown in Figure 15, Figure 16 and Figure 17. See Table 4 for specific data. It can be seen from the results that compared with the adaptive SIFT algorithm, the algorithm in this paper had fewer matching points, and the feature-point extraction and matching times were reduced as was total time.
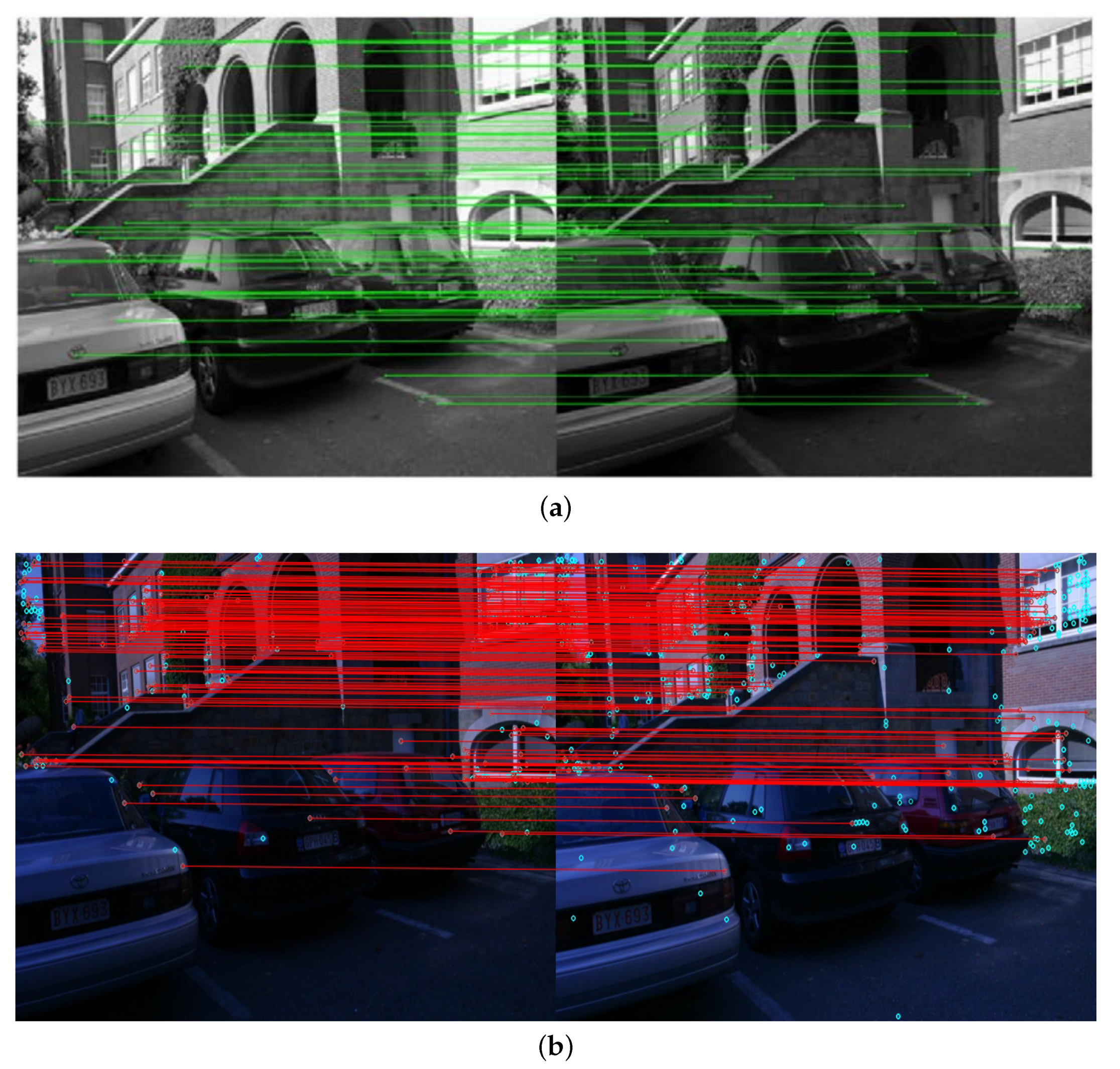
The third set is of images of different lighting. The detection results of reference image feature points and image feature points to be registered, and the image matching results obtained by the adaptive SIFT algorithm and the algorithm in this paper are shown in Figure 18, Figure 19 and Figure 20. See Table 5 for specific data. It can be seen from the results that the algorithm in this paper had fewer matching points, and the feature point extraction and matching times as well as total time were all reduced.
The three sets of data all show that the proposed algorithm had fewer matching points and less running time than the adaptive SIFT algorithm.
4.4. Summary of Experimental Results
To help readers intuitively feel the advantages of the algorithm in this paper, the index improvement of the algorithm compared with the SIFT algorithm and the adaptive SIFT algorithm is summarized, as shown in Table 6.
5. Conclusions
To address the slow matching speed of the SIFT algorithm, this paper proposed a method of increasing the stability factor in the construction scale space, reducing the number of feature points and improving the stability of the feature points. According to the concept of reducing the time dimension, the four corners of the square description area of the SIFT feature point neighborhood were removed so that the dimension of the feature vector would be reduced, the operation speed accelerated, and the matching efficiency of the feature descriptor improved. To prove the effects and advantages of the algorithm, it was verified by the kitti and Euroc datasets. Then the algorithm was compared with a state-of-the-art algorithm. The results showed that the algorithm in this paper reduced the number of matching points for feature extraction time, matching time, and rems error by 27.04, 12.96, and 14.12%, respectively.
Author Contributions
Formal analysis, S.M.; Methodology, H.Y.; Software, L.T. and X.M.; Supervision, H.Y.; Writing—original draft, L.T. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Natural Science Foundation of Hebei Province (No. F2021501021 and No. F2020501040).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
The ownership belongs to Corresponding author. Please contact [email protected] if necessary.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ma, J.; Jiang, X.; Fan, A.; Jiang, J.; Yan, J. Image matching from handcrafted to deep features: A survey. Int. J. Comput. Vis. 2021, 129, 23–79. [Google Scholar] [CrossRef]
- Jiang, X.; Ma, J.; Xiao, G.; Shao, Z.; Guo, X. A review of multimodal image matching: Methods and applications. Inf. Fusion 2021, 73, 22–71. [Google Scholar] [CrossRef]
- Li, C.; Yu, L.; Fei, S. Large-scale, real-time 3D scene reconstruction using visual and IMU sensors. IEEE Sens. J. 2020, 20, 5597–5605. [Google Scholar] [CrossRef]
- Ciaparrone, G.; Sánchez, F.L.; Tabik, S.; Troiano, L.; Tagliaferri, R.; Herrera, F. Deep learning in video multi-object tracking: A survey. Neurocomputing 2020, 381, 61–88. [Google Scholar] [CrossRef]
- Kechagias-Stamatis, O.; Aouf, N. Automatic target recognition on synthetic aperture radar imagery: A survey. IEEE Aerosp. Electron. Syst. Mag. 2021, 36, 56–81. [Google Scholar] [CrossRef]
- Wang, M.; Li, H.; Tao, D.C.; Lu, K.; Wu, X.D. Multimodal graph-based reranking for web image search. IEEE Trans. Image Process. 2012, 21, 4649–4661. [Google Scholar] [CrossRef]
- Wang, M.; Yang, K.Y.; Hua, X.S.; Zhang, H.J. Towards a rele-vant and diverse search of social images. IEEE Trans. Multimed. 2010, 12, 829–842. [Google Scholar] [CrossRef]
- Li, J.; Allinson, N.M. A comprehensive review of current local features for computer vision. Neurocomputing 2008, 71, 1771–1787. [Google Scholar] [CrossRef]
- Erxue, C.; Zengyuan, L.; Xin, T.; Shiming, L. Application of scale invariant feature transformation to SAR imagery registration. Acta Autom. Sin. 2008, 34, 861–868. [Google Scholar]
- Yan, Z.; Dong, C.; Wei, W.; Jianda, H.; Yuechao, W. Status and development of natural scene understanding for vision-based outdoor mobile robot. Acta Autom. Sin. 2010, 36, 1–11. [Google Scholar]
- Haifeng, L.; Yufeng, M.; Tao, S. Research on object tracking algorithm based on SIFT. Acta Autom. Sin. 2010, 36, 1204–1208. [Google Scholar]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Ooi, B.C.; McDonell, K.J.; Sacks-Davis, R. Spatial Kd-tree: An indexing mechanism for spatial databases. In Proceedings of the IEEE International Computers Software and Applications Conference, Tokyo, Japan, 7–9 October 1987. [Google Scholar]
- Weinberger, K.Q.; Saul, L.K. Distance Metric Learning for Large Margin Nearest Neighbor Classification. J. Mach. Learn. Res. 2009, 10, 207–244. [Google Scholar]
- Chen, J.H.; Chen, C.S.; Chen, Y.S. Fast algorithm for robust template matching with M-estimators. IEEE Trans. Signal Process. 2003, 51, 230–243. [Google Scholar] [CrossRef]
- Torr, P.H.S.; Zisserman, A. MLESAC: A new robust estimator with application to estimating image geometry. Comput. Vis. Image Underst. 2000, 78, 138–156. [Google Scholar] [CrossRef]
- Choi, S.; Kim, T.; Yu, W. Performance evaluation of RANSAC family. In Proceedings of the British Machine Vision Conference, London, UK, 7–10 September 2009. [Google Scholar]
- Yan, K.; Sukthankar, R. PCA-SIFT: A more distinctive representation for local image descriptors. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Washington, DC, USA, 27 June–2 July 2004. [Google Scholar]
- Mikolajczyk, K.; Schmid, C. A performance evaluation of local descriptors. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 1615–1630. [Google Scholar] [CrossRef]
- Lazebnik, S.; Schmid, C.; Ponce, J. A sparse texture representation using local affine regions. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 1265–1278. [Google Scholar] [CrossRef]
- Bay, H.; Tuytelaars, T.; Gool, L.V. SURF: Speeded up robust features. In Proceedings of the 9th European Conference on Computer Vision, Graz, Austria, 7–13 May 2006. [Google Scholar]
- Ojala, T.; Pietikainen, M.; Maenpaa, T. Multiresolution grayscale and rotation invariant texture classification with local binary patterns. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 971–987. [Google Scholar] [CrossRef]
- Ahonen, T.; Hadid, A.; Pietiainen, M. Face description with local binary patterns: Application to face recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 2037–2041. [Google Scholar] [CrossRef]
- Jian, X.; Xiaoqing, D.; Shengjin, W.; Youshou, W. Background subtraction based on a combination of local texture and color. Acta Autom. Sin. 2009, 35, 1145–1150. [Google Scholar]
- Huang, D.; Ardabilian, M.; Wang, Y.H.; Chen, L.M. Asymmetric 3D/2D face recognition based on LBP facial representation and canonical correlation analysis. In Proceedings of the 16th International Conference on Image Procesing, Cairo, Egypt, 7–10 November 2009. [Google Scholar]
- Guo, Z.H.; Zhang, L.; Zhang, D.; Mou, X.Q. Hierarchical multiscale LBP for face and palmprint recognition. In Proceedings of the 16th International Conference on Image Procesing, Hong Kong, China, 26–29 September 2010. [Google Scholar]
- Guo, Z.H.; Zhang, L.; Zhang, D. A completed modeling of local binary pattern operator for texture classification. IEEE Trans. Image Process. 2010, 19, 1657–1663. [Google Scholar] [PubMed]
- Heikkila, M.; Pietikainen, M.; Schmid, C. Description of interest regions with local binary patterns. Pattern Recognit. 2009, 42, 425–436. [Google Scholar] [CrossRef]
- Tan, X.Y.; Triggs, B. Enhanced local texture feature sets for face recognition under difficult lighting conditions. IEEE Trans. Image Process. 2010, 19, 1635–1650. [Google Scholar] [PubMed]
- Mikolajczyk, K.; Schmid, C. A performance evaluation of local descriptors. In Proceedings of the International Conference on Computer Vision and Pattern Recognition, Madison, WI, USA, 18–20 June 2003. [Google Scholar]
- Abdel Hakim, A.E.; Farag, A.A. CSIFT: A SIFT descriptor with color invariant characteristics. In Proceedings of the International Conferenceon Computer Vision and Pattern Recognition, New York, NY, USA, 17–22 June 2006. [Google Scholar]
- Morel, J.M.; Yu, G. ASIFT: A new framework for fully affine invariant image comparison. SIAM J. Imaging Sci. 2009, 2, 438–469. [Google Scholar] [CrossRef]
- Li, L.; Fuyuan, P.; Kun, Z. Simplified SIFT algorithm for fast image matching. Infrared Laser Eng. 2008, 37, 181–184. [Google Scholar]
- Cai, G.R.; Li, S.; Wu, Y.; Su, S.; Chen, S. A perspective invariant image matching algorithm. Acta Autom. Sin. 2013, 39, 1053–1061. [Google Scholar] [CrossRef]
- Yonghe, T.; Huanzhang, L.; Moufa, H. Local feature description algorithm based on Laplacian. Opt. Precis. Eng. 2011, 19, 2999–3006. [Google Scholar]
- Hossein-Nejad, Z.; Agahi, H.; Mahmoodzadeh, A. Image matching based on the adaptive redundant keypoint elimination method in the SIFT algorithm. Pattern Anal. Appl. 2021, 24, 669–683. [Google Scholar] [CrossRef]
Figure 1.
Spatial extremum detection.

Figure 2.
Depiction of the 128-dimensional feature descriptor.

Figure 3.
96-dimensional feature descriptor.

Figure 4.
The extraction result of feature points of the 17th reference image. (a) Feature point extraction result of the SIFT algorithm; (b) feature point extraction result of this algorithm.
Figure 4.
The extraction result of feature points of the 17th reference image. (a) Feature point extraction result of the SIFT algorithm; (b) feature point extraction result of this algorithm.

Figure 5.
Extraction results of feature points of the 17th group of images to be registered. (a) Feature point extraction result of the SIFT algorithm; (b) feature point extraction result of this algorithm.
Figure 5.
Extraction results of feature points of the 17th group of images to be registered. (a) Feature point extraction result of the SIFT algorithm; (b) feature point extraction result of this algorithm.

Figure 6.
Matching results of the 17th group of pictures. (a) The matching results of the SIFT algorithm; (b) the matching results of the algorithm in this paper.
Figure 6.
Matching results of the 17th group of pictures. (a) The matching results of the SIFT algorithm; (b) the matching results of the algorithm in this paper.

Figure 7.
Comparison of the kitti dataset’s specific experimental data in four categories. (a) the number of feature points of the reference image; (b) the number of feature points of the images to be compared; (c) matching time; (d) Rems errors.
Figure 7.
Comparison of the kitti dataset’s specific experimental data in four categories. (a) the number of feature points of the reference image; (b) the number of feature points of the images to be compared; (c) matching time; (d) Rems errors.


Figure 8.
The extraction result of feature points of the 11th reference image. (a) Feature point extraction result of the SIFT algorithm; (b) feature point extraction result of this algorithm.
Figure 8.
The extraction result of feature points of the 11th reference image. (a) Feature point extraction result of the SIFT algorithm; (b) feature point extraction result of this algorithm.

Figure 9.
Extraction results of feature points of the 11th group of images to be registered. (a) Feature point extraction result of the SIFT algorithm; (b) feature point extraction result of this algorithm.
Figure 9.
Extraction results of feature points of the 11th group of images to be registered. (a) Feature point extraction result of the SIFT algorithm; (b) feature point extraction result of this algorithm.

Figure 10.
The matching results of the 11th group of pictures. (a) The matching results of the SIFT algorithm; (b) the matching results of the algorithm in this paper.
Figure 10.
The matching results of the 11th group of pictures. (a) The matching results of the SIFT algorithm; (b) the matching results of the algorithm in this paper.

Figure 11.
Comparison of the Euroc dataset’s specific experimental data in four caegories: (a) the number of feature points of the reference image; (b) the number of feature points of the images to be compared; (c) matching time; and (d) Rems errors.
Figure 11.
Comparison of the Euroc dataset’s specific experimental data in four caegories: (a) the number of feature points of the reference image; (b) the number of feature points of the images to be compared; (c) matching time; and (d) Rems errors.

Figure 12.
The extraction result of feature points of the reference image. (a) The extraction result of the adaptive RKEM algorithm; (b) the extraction result of the algorithm in this paper.
Figure 12.
The extraction result of feature points of the reference image. (a) The extraction result of the adaptive RKEM algorithm; (b) the extraction result of the algorithm in this paper.

Figure 13.
The extraction result of feature points of the image to be registered. (a) The adaptive RKEM algorithm; (b) The extraction result of the algorithm in this paper.
Figure 13.
The extraction result of feature points of the image to be registered. (a) The adaptive RKEM algorithm; (b) The extraction result of the algorithm in this paper.

Figure 14.
Matching results of images with different affine distortions. (a) The adaptive RKEM algorithm; (b) The algorithm in this paper.
Figure 14.
Matching results of images with different affine distortions. (a) The adaptive RKEM algorithm; (b) The algorithm in this paper.

Figure 15.
Extraction result of feature points of the reference image. (a) The adaptive RKEM algorithm; (b) The algorithm in this paper.
Figure 15.
Extraction result of feature points of the reference image. (a) The adaptive RKEM algorithm; (b) The algorithm in this paper.

Figure 16.
The extraction result of feature points of the image to be registered. (a) The adaptive RKEM algorithm; (b) The algorithm in this paper.
Figure 16.
The extraction result of feature points of the image to be registered. (a) The adaptive RKEM algorithm; (b) The algorithm in this paper.

Figure 17.
Matching results of images with different affine distortion. (a) The adaptive RKEM algorithm; (b) The algorithm in this paper.
Figure 17.
Matching results of images with different affine distortion. (a) The adaptive RKEM algorithm; (b) The algorithm in this paper.

Figure 18.
The extraction result of feature points of the reference image. (a) the adaptive RKEM algorithm; (b) the algorithm in this paper.
Figure 18.
The extraction result of feature points of the reference image. (a) the adaptive RKEM algorithm; (b) the algorithm in this paper.

Figure 19.
The extraction result of feature points of the image to be registered. (a) The adaptive RKEM algorithm; (b) The algorithm in this paper.
Figure 19.
The extraction result of feature points of the image to be registered. (a) The adaptive RKEM algorithm; (b) The algorithm in this paper.

Figure 20.
Matching results of images with different affine distortion. (a) The adaptive RKEM algorithm; (b) The algorithm in this paper.
Figure 20.
Matching results of images with different affine distortion. (a) The adaptive RKEM algorithm; (b) The algorithm in this paper.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Comparison of the results of Kitti dataset.
| Number | SIFT Algorithm | The Algorithm of This Paper | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| RN | WN | MN | PT(s) | rems | RN | WN | MN | PT(s) | rems | |
| 1 | 12,823 | 16,329 | 66 | 6.839 | 0.146 | 11,537 | 14,633 | 44 | 6.055 | 0.001 |
| 2 | 11,545 | 10,407 | 86 | 6.450 | 0.134 | 10,686 | 9419 | 54 | 5.817 | 0.131 |
| 3 | 10,204 | 7845 | 66 | 5.049 | 0.227 | 8387 | 6490 | 46 | 4.067 | 0.132 |
| 4 | 9909 | 3540 | 71 | 4.490 | 0.204 | 8452 | 2509 | 45 | 3.627 | 0.065 |
| 5 | 9486 | 5295 | 90 | 4.344 | 0.161 | 8390 | 4505 | 63 | 3.678 | 0.122 |
| 6 | 9276 | 11,774 | 71 | 5.346 | 0.384 | 8326 | 10,443 | 48 | 5.102 | 0.154 |
| 7 | 8725 | 5057 | 69 | 4.244 | 0.192 | 6689 | 3589 | 48 | 3.216 | 0.129 |
| 8 | 8604 | 10,518 | 83 | 4.850 | 0.147 | 7797 | 10,094 | 60 | 4.069 | 0.118 |
| 9 | 8497 | 6751 | 66 | 4.244 | 0.199 | 7497 | 5837 | 46 | 3.520 | 0.071 |
| 10 | 7674 | 4971 | 80 | 3.994 | 2.465 | 6251 | 4376 | 57 | 3.545 | 0.152 |
| 11 | 7240 | 4507 | 71 | 3.635 | 0.176 | 6567 | 3947 | 45 | 3.115 | 0.0.131 |
| 12 | 7152 | 11,281 | 65 | 4.014 | 0.517 | 6318 | 10,269 | 45 | 3.495 | 0.015 |
| 13 | 7011 | 6622 | 78 | 3.949 | 0.119 | 6136 | 5778 | 53 | 3.615 | 0.134 |
| 14 | 6914 | 7581 | 72 | 3.701 | 0.130 | 5391 | 5716 | 54 | 2.938 | 0.103 |
| 15 | 6457 | 6914 | 65 | 3.748 | 0.028 | 5383 | 5491 | 45 | 2.859 | 0.103 |
| 16 | 6223 | 5830 | 72 | 3.521 | 0.145 | 4355 | 4976 | 52 | 2.940 | 0.143 |
| 17 | 6203 | 4348 | 74 | 3.283 | 0.153 | 4725 | 3429 | 53 | 2.629 | 0.121 |
| 18 | 5538 | 5531 | 79 | 3.205 | 0.142 | 4514 | 4871 | 58 | 2.452 | 0.114 |
| 19 | 5520 | 5799 | 80 | 3.304 | 0.150 | 4159 | 4102 | 57 | 2.225 | 0.108 |
| 20 | 5057 | 4900 | 65 | 2.710 | 0.145 | 3589 | 3381 | 47 | 1.911 | 0.128 |
Table 2.
Comparison of the results of Euroc.
| Number | SIFT Algorithm | The Algorithm of This Paper | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| RN | WN | MN | PT(s) | rems | RN | WN | MN | PT(s) | rems | |
| 1 | 7497 | 7131 | 1132 | 18.869 | 0.016 | 6425 | 6005 | 1002 | 14.621 | 0.015 |
| 2 | 6623 | 5770 | 501 | 12.036 | 0.030 | 5307 | 4513 | 430 | 7.963 | 0.025 |
| 3 | 6400 | 7003 | 346 | 10.063 | 0.040 | 4908 | 5790 | 270 | 6.777 | 0.022 |
| 4 | 6156 | 5960 | 692 | 11.869 | 0.024 | 5178 | 4942 | 523 | 8.904 | 0.023 |
| 5 | 5784 | 5922 | 441 | 11.150 | 0.025 | 4485 | 4752 | 375 | 7.266 | 0.024 |
| 6 | 5729 | 5130 | 531 | 9.542 | 0.027 | 4360 | 4079 | 428 | 6.252 | 0.026 |
| 7 | 5141 | 5159 | 677 | 9.933 | 0.021 | 4441 | 4273 | 513 | 7.617 | 0.019 |
| 8 | 5138 | 4589 | 306 | 7.522 | 0.027 | 4206 | 3662 | 281 | 5.497 | 0.025 |
| 9 | 5130 | 4698 | 424 | 8.551 | 0.026 | 4079 | 4698 | 380 | 5.955 | 0.026 |
| 10 | 4774 | 3817 | 158 | 4.764 | 0.050 | 3891 | 2991 | 128 | 3.828 | 0.045 |
| 11 | 4649 | 4308 | 91 | 4.354 | 0.071 | 3662 | 3383 | 72 | 3.224 | 0.057 |
| 12 | 4518 | 4161 | 160 | 5.595 | 0.053 | 3529 | 3228 | 110 | 3.993 | 0.051 |
| 13 | 4463 | 3870 | 273 | 6.903 | 0.042 | 3505 | 3019 | 266 | 4.696 | 0.025 |
| 14 | 4382 | 4813 | 127 | 5.330 | 0.065 | 3238 | 3835 | 101 | 3.509 | 0.062 |
| 15 | 4308 | 4518 | 324 | 6.813 | 0.034 | 3193 | 3529 | 308 | 4.704 | 0.030 |
| 16 | 4204 | 3994 | 390 | 7.408 | 0.036 | 3243 | 3068 | 298 | 4.463 | 0.031 |
| 17 | 4081 | 4003 | 455 | 6.639 | 0.027 | 3243 | 3207 | 311 | 4.473 | 0.026 |
| 18 | 3826 | 4238 | 253 | 6.064 | 0.040 | 2947 | 3137 | 239 | 4.096 | 0.038 |
| 19 | 3802 | 3826 | 247 | 5.588 | 0.040 | 2879 | 2947 | 227 | 3.691 | 0.037 |
| 20 | 3697 | 3777 | 117 | 3.851 | 0.053 | 2941 | 2985 | 131 | 2.958 | 0.045 |
Table 3.
Comparison of matching results of different affine distorted images.
| Algorithm | MN | REMS | FT(s) | PT(s) | ST(s) |
|---|---|---|---|---|---|
| SIFT | 479 | ||||
| Adaptive RKEM | 245 | ||||
| This paper | 166 |
Table 4.
Comparison of matching results of images of different scales images.
| Algorithm | MN | REMS | FT(s) | PT(s) | ST(s) |
|---|---|---|---|---|---|
| SIFT | 263 | ||||
| Adaptive RKEM | 179 | ||||
| This paper | 114 |
Table 5.
Comparison of matching results of different illumination images.
| Algorithm | MN | REMS | FT(s) | PT(s) | ST(s) |
|---|---|---|---|---|---|
| SIFT | 361 | ||||
| Adaptive SIFT | 228 | ||||
| This paper | 184 |
Table 6.
Comparison of matching results of different illumination images.
| Dataset | PM | PT | REMS |
|---|---|---|---|
| Kitti dataset | |||
| Euroc dataset | |||
| Different affine distortion images | |||
| Different scale images | |||
| Different illumination images | |||
| Overall |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Tang, L.; Ma, S.; Ma, X.; You, H. Research on Image Matching of Improved SIFT Algorithm Based on Stability Factor and Feature Descriptor Simplification. Appl. Sci. 2022, 12, 8448. https://0-doi-org.brum.beds.ac.uk/10.3390/app12178448
AMA Style
Tang L, Ma S, Ma X, You H. Research on Image Matching of Improved SIFT Algorithm Based on Stability Factor and Feature Descriptor Simplification. Applied Sciences. 2022; 12(17):8448. https://0-doi-org.brum.beds.ac.uk/10.3390/app12178448
Chicago/Turabian StyleTang, Liang, Shuhua Ma, Xianchun Ma, and Hairong You. 2022. "Research on Image Matching of Improved SIFT Algorithm Based on Stability Factor and Feature Descriptor Simplification" Applied Sciences 12, no. 17: 8448. https://0-doi-org.brum.beds.ac.uk/10.3390/app12178448
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.