1. Introduction
Induction machines that facilitate the production processes and related services lead to enormous changes in human lifestyles. Induction machines are extensively used in all aspects of industrial, commercial, domestic, utility and special-purpose commercial markets owing to their rugged configuration, low cost, versatility, reasonably small size, and their operation with an easily available power supply. However, induction machines suffer from a low efficiency and low power factor that means the loss of energy is high. This issue is viewed as an important disadvantage because of the energy cost and global energy concerns.
The improvement of induction machine efficiency was tried through an optimal design of these motors. However, due to several inherent limitations, it is difficult to improve the efficiency of induction machines significantly. An alternative solution is to replace the induction machines with high-efficiency permanent magnet synchronous motors (PMSMs). An important obstacle for ordinary PMSMs is they need an inverter to start that is not economical for many single speed applications. To overcome this problem, the squirrel-cage bar-equipped PM motors—called line start permanent magnet synchronous motors (LS-PMSMs) —have been introduced. LS-PMSMs also allow for the reaching of super premium efficiency levels [
1,
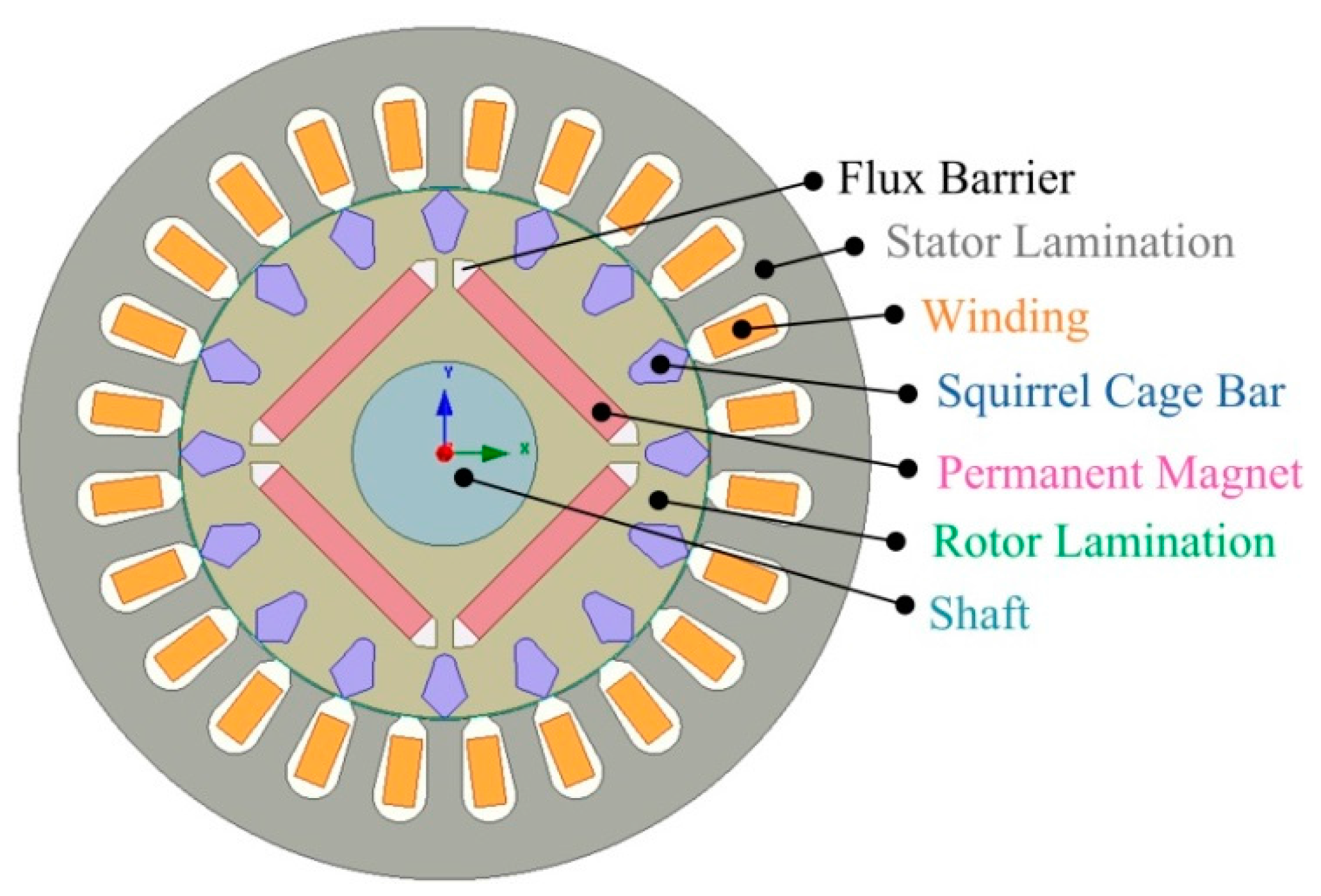
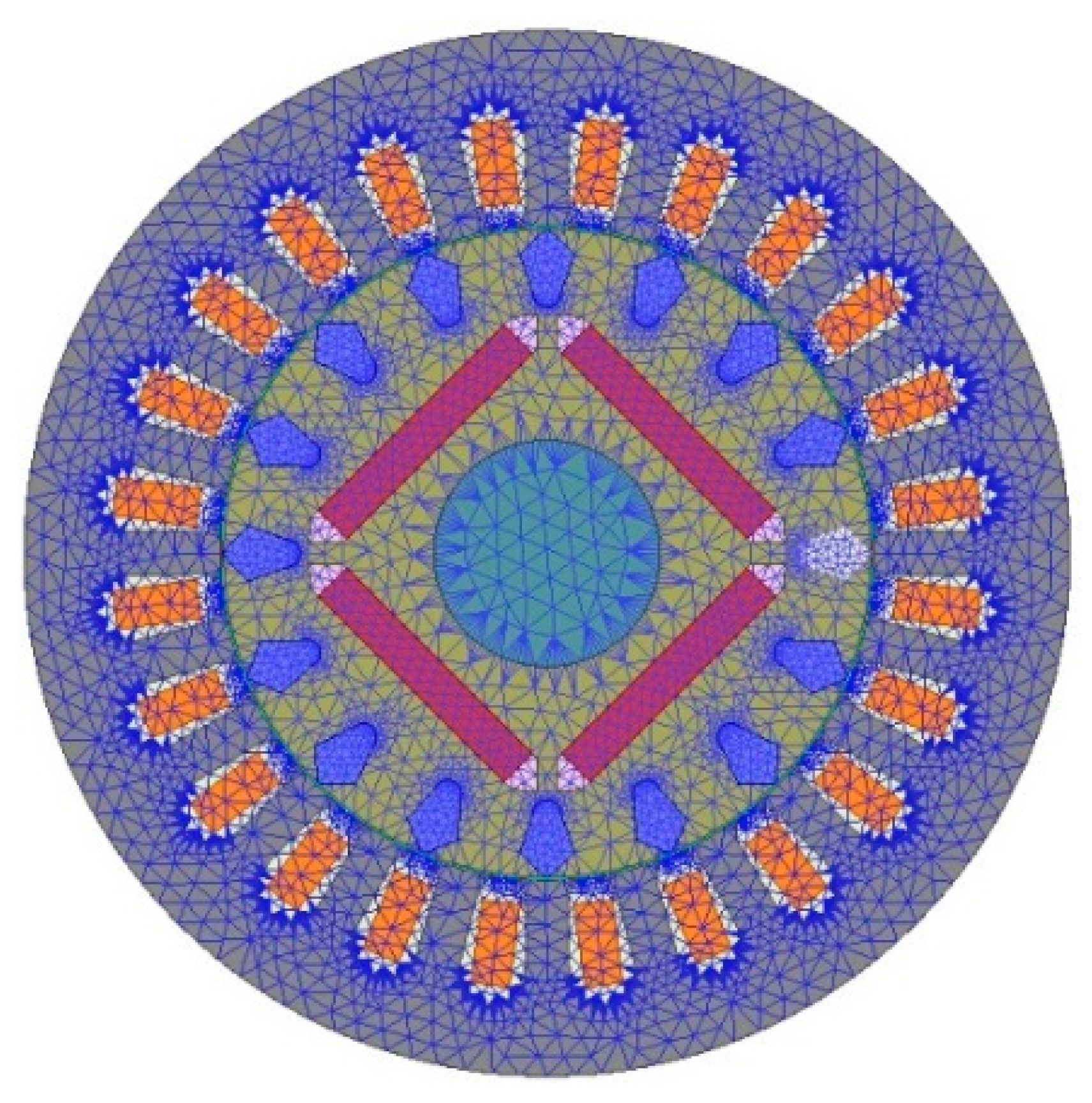
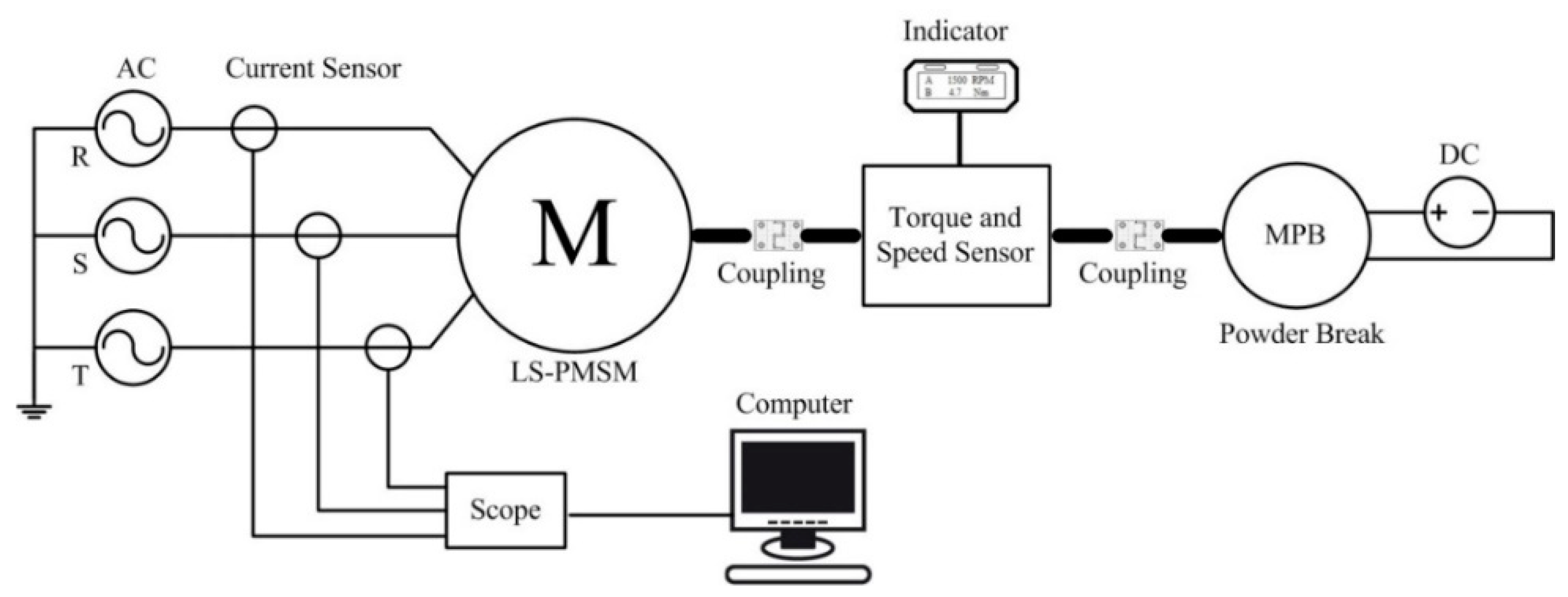
2]. The structure and configuration of the three phase-four pole LS-PMSM are depicted in
Figure 1.
An LS-PMSM is made up of a stator and a hybrid rotor with a squirrel-cage and pairs of permanent magnets. In this machine, when the rotor is operated from a standstill, squirrel-cage bars generate a suitably high starting torque, enabling the direct-on-line movement of the rotor. The reverse-rotating fields of the air gap reduces in a squirrel-cage rotor when there is an unbalancing in the load condition or there is a fluctuation in the rotation speed. Otherwise, if there is no squirrel-cage in the rotor, these conditions lead to significant losses, and no reduction in the reverse-rotating fields is observed [
3].
In the industry, LS-PMSMs are exposed to unavoidable stresses; for example, electrical, environmental, mechanical and thermal stresses. These stresses produce some failures and imperfections in different parts of the LS-PMSMs. Usually, the generated faults disrupt the operation of the LS-PMSMs, degrade the manufacturing quality, and therefore result in significant cost penalties. Maintenance costs can be greatly reduced with the application of an efficient fault detection method, as this avoids spontaneous downtimes. The application of LS-PMSM is growing gradually, although the industry is still lacking an accurate fault detection criterion for maintenance policies of the motor.
The aim of this paper is to extend a motor startup methodology to the detection of a broken rotor bar (BRB) in LS-PMSM. In this method, a novel approach of deriving the amplitude of the left sideband harmonic (LSH) in a specific sub-band frequency is presented for BRB. Using discrete wavelet transform, LSH is extracted from the current spectrum and is used as an input for entropy features.
2. Background and Methodology
The key for successful fault detection in electrical machines relies on the availability of accurate information from them which allows for the understanding of the machine’s condition. Thus, the basis of any fault detection system is precise condition monitoring. It can easily be realized from the name that condition monitoring is an act designed to observe the performance of a device, including electric machines, with the purpose of a maintenance strategy. The reliability of condition monitoring techniques depends upon the best understanding of motor characteristics, including electrical and mechanical characteristics, in both healthy and faulty conditions. In this respect, condition monitoring techniques have continuously been developed over the years, resulting in a range of available methods for failure diagnosis in electrical devices. Condition monitoring techniques presented for broken rotor bar detection in induction machines can be classified into the following categories [
4,
5]:
- ▪
- ▪
- ▪
Motor Current Signature Analysis (MCSA) [
8];
- ▪
Electromagnetic Field Monitoring [
9];
- ▪
Instantaneous Angular Speed [
10];
- ▪
- ▪
Motor Circuit Analysis [
12];
- ▪
- ▪
- ▪
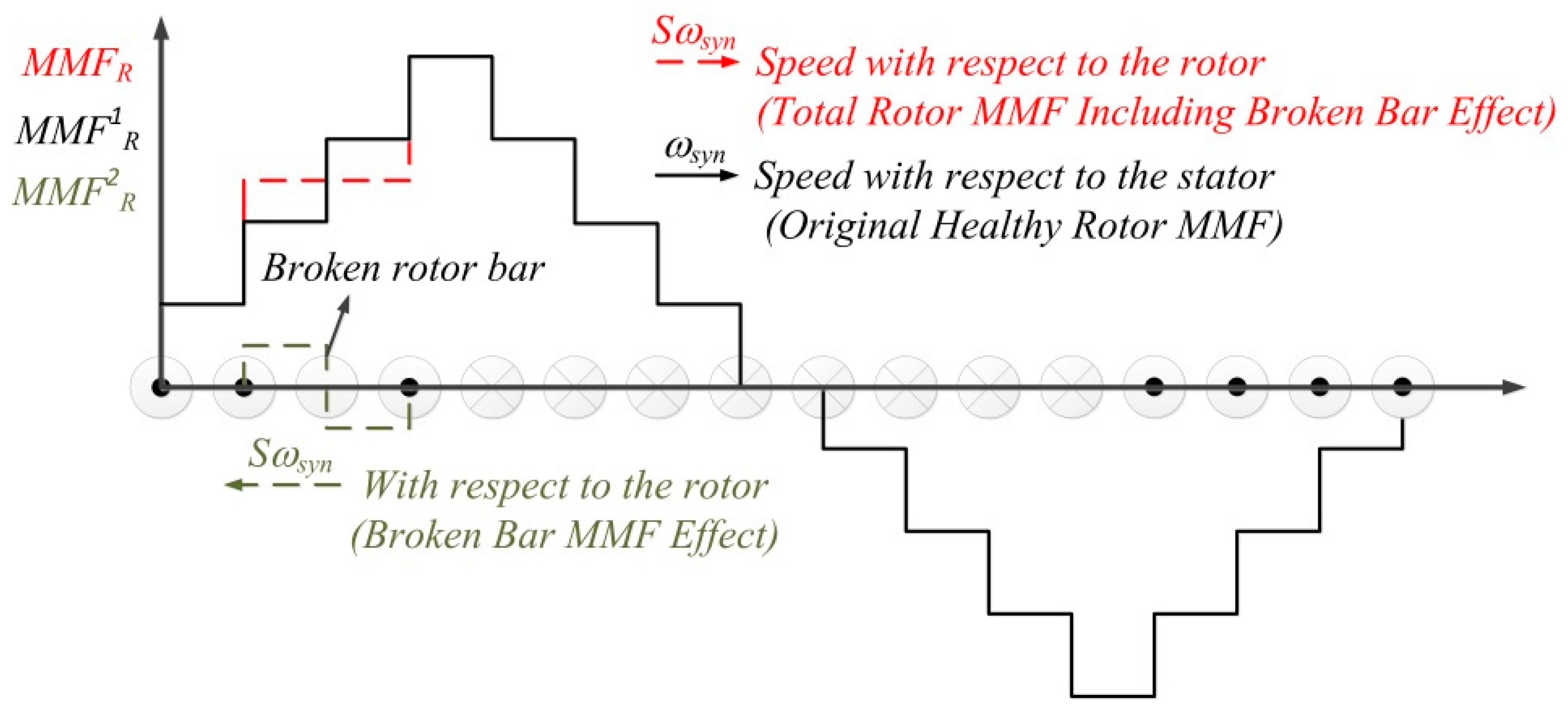
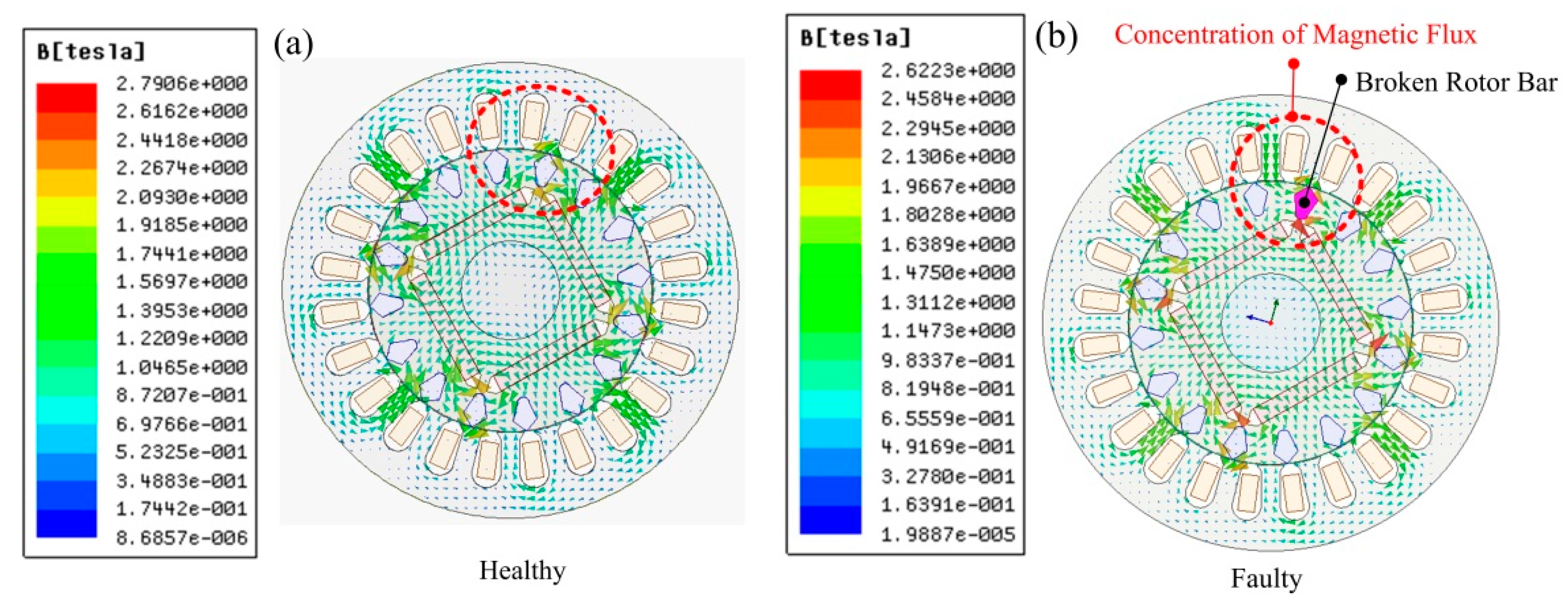
This section discusses the influence of BRB on the rotor magneto-motive force (MMF) and its effects on the stator current signals. The forward component of this MMF, in a healthy case, rotates at a synchronous speed,
, with respects to the stator (or
with regard to the rotor). When a bar cracks, there will be no current flow in it, and therefore no magnetic flux is produced surrounding the BRB. As there is no magnetic flux around the BRB, a non-zero backward rotating field is generated, and thus an asymmetry is created in the rotor MMF. It is worth mentioning that the backward rotating field in a healthy rotor is zero. The non-zero backward rotating component produced due to the existence of a BRB conducts an equal but reverse current in the healthy bars. Such a current causes secondary failure. The rotation of non-zero backward MMF as a result of BRB is at a slip speed, which is defined by
with regards to the rotor or by Equation (1) with respect to the stator [
16].
The non-zero backward MMF produces harmonics which are superimposed on the stator currents. These superimposed features can be used as signatures for the detection of BRB in the MCSA technique [
17].
Figure 2 shows the effect of BRB faults on the MMF of rotor for a cage with 16 bars per pair of poles. As explained before, broken bars cause harmonic components of
in the stator current. Among these components, the main one corresponds to the frequency that has
, called the left sideband harmonic (LSH) and defined as:
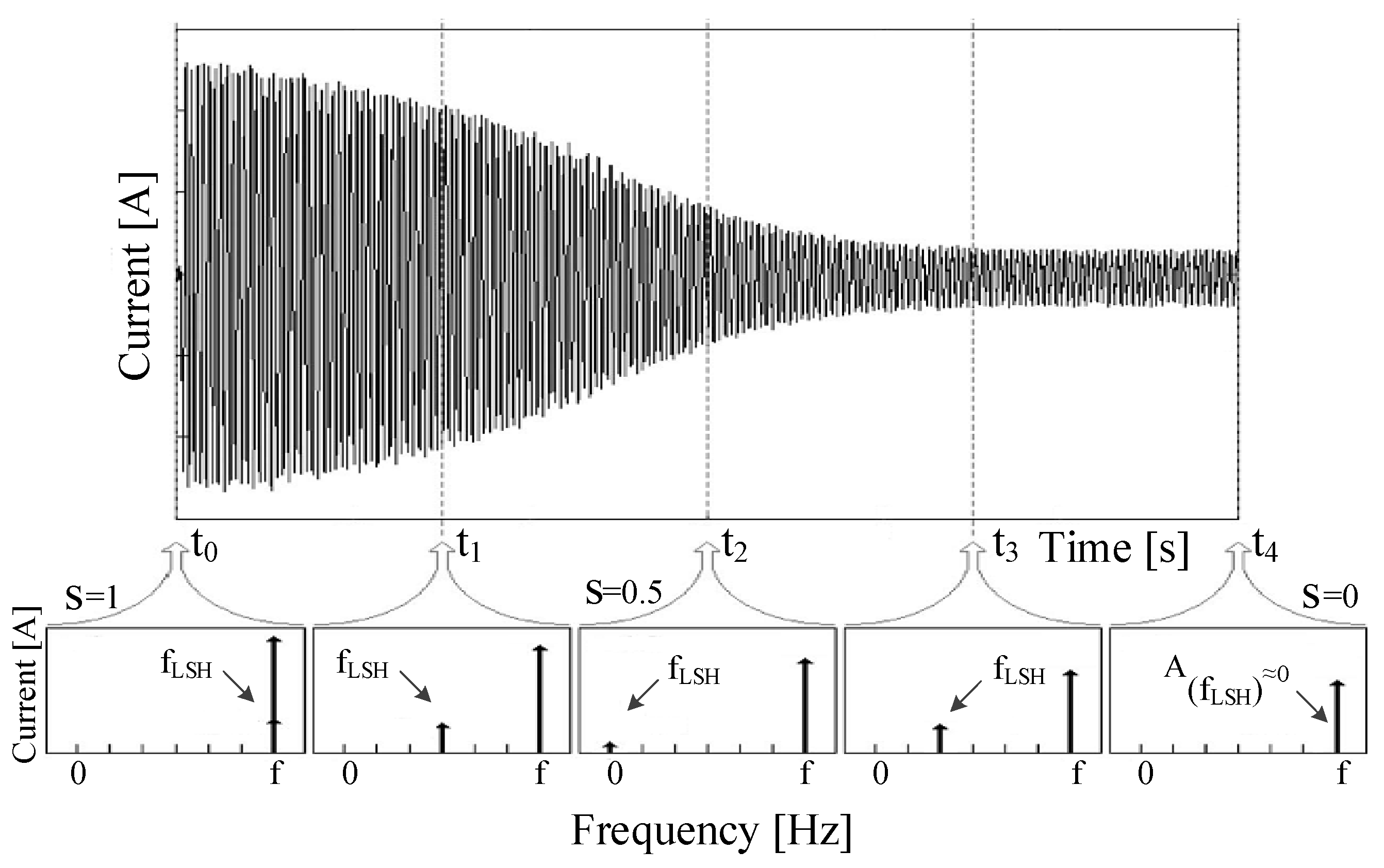
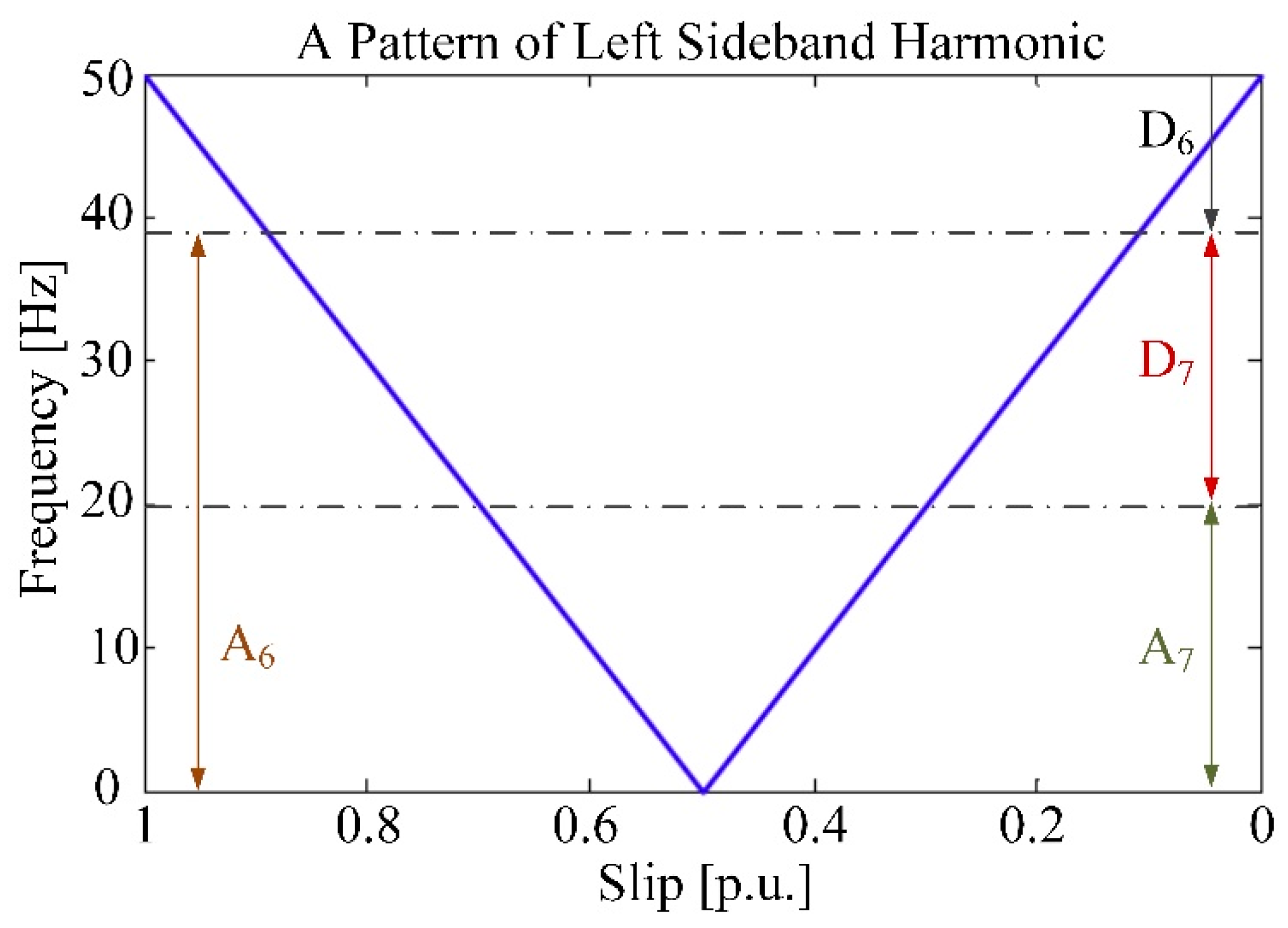
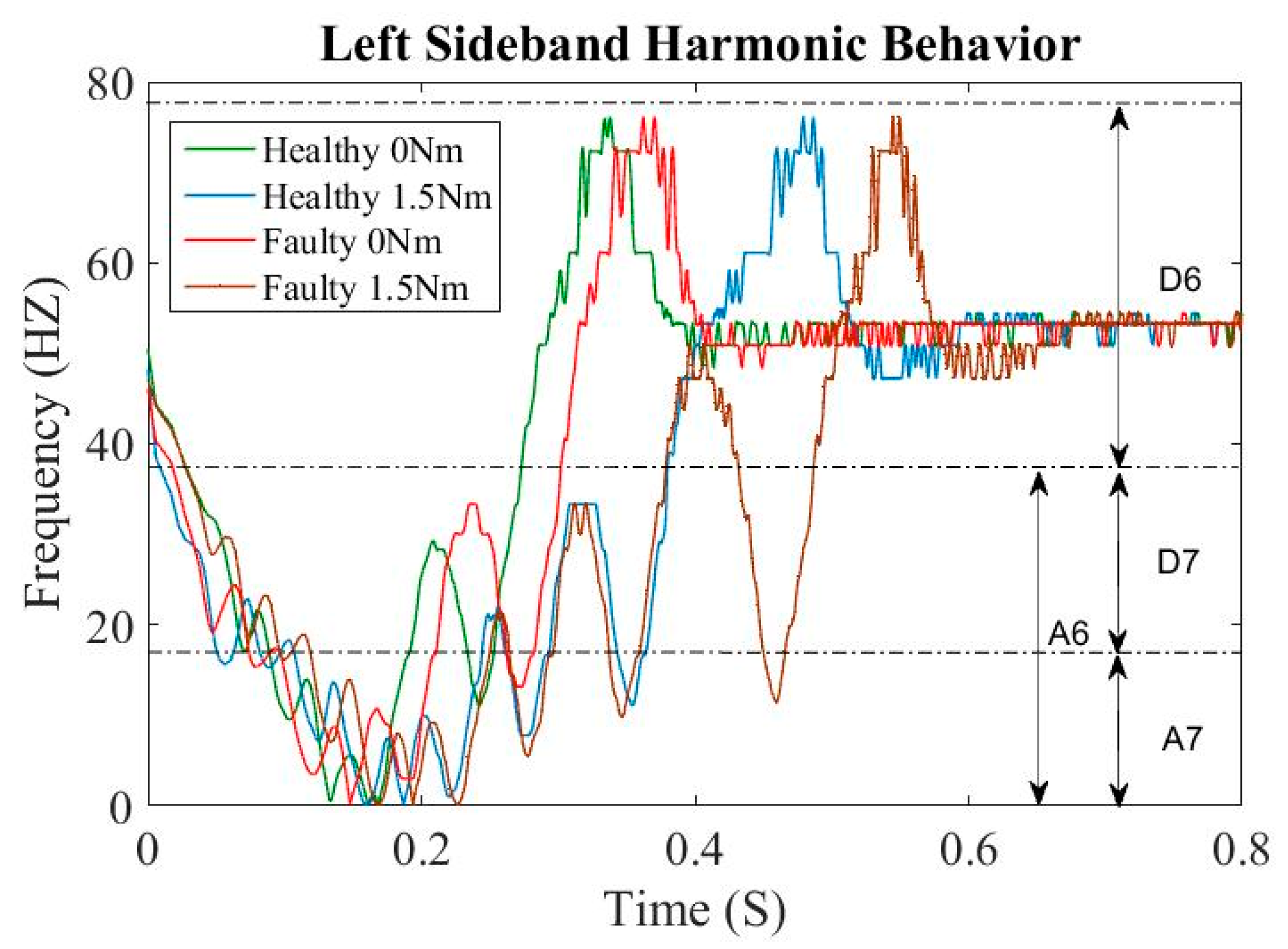
The motor slip changes from one to zero during the start-up; at the beginning of the start-up, the motor slip is one and it goes to zero when the motor reaches the steady state. Accordingly, the frequency of LSH (
) varies from the value equal to the fundamental frequency to zero and vice versa. The appearance of this harmonic and its particular evolution were also explained [
18]. Squirrel-cage bars in LS-PMSM improve start-up operation by allowing the rotor to have direct-on-line movement. In the stationary region, no current flows in the squirrel-cage bars and thus the value of LSH becomes zero,
. The behavior of the LSH frequency for LS-PMSM during the start-up transient is shown in
Figure 3.
The main idea underlying this methodology is the tracking of the characteristic transient evolution of the fault-related feature from the LSH pattern [
19]. Wavelet transform has been shown to be one of the best tools for non-stationary signal analysis [
20]. The applicability of using wavelet transform for decomposing a signal and extracting its sensitive bands is considered to be good for the health monitoring of an electrical motor and fault diagnosis [
21]. Discrete wavelet transform (DWT) is proposed to be used because it provides a dyadic band-pass filtering of the signal as well as the advantages of its simplicity, low computational requirements and the easy interpretation of the obtained results [
18]. The DWT is computed through the Mallat algorithm, in which low-pass and high-pass filtering of a time-domain signal is performed while the sampling rate changes [
22]. DWT allows high frequency components to be analyzed with short time intervals, and low frequency components to be analyzed with long time intervals [
23]. The decomposition of a sampled signal
. using DWT results
wavelet signals, which are an approximation signal,
, and
detail signals
with
varying from 1 to
[
24].
The parameter
is an integer known as the number of decomposition levels and it is set based on the sampling rate (
), which is used for capturing
. The n also can be computed based on the frequency interval covered by the fault-related component. Taking into account whether the second rule is considered,
n should be less than predicted by the sampling rate. The approximation signal
is obtained using the scaling function, deduced by the father wavelet (
) and scaling coefficients
:
The detail signal
is calculated using
as a base; the wavelet coefficients with level
, which is a scaled and time-expanded version of the wavelet functions, are deduced by the mother wavelet (
):
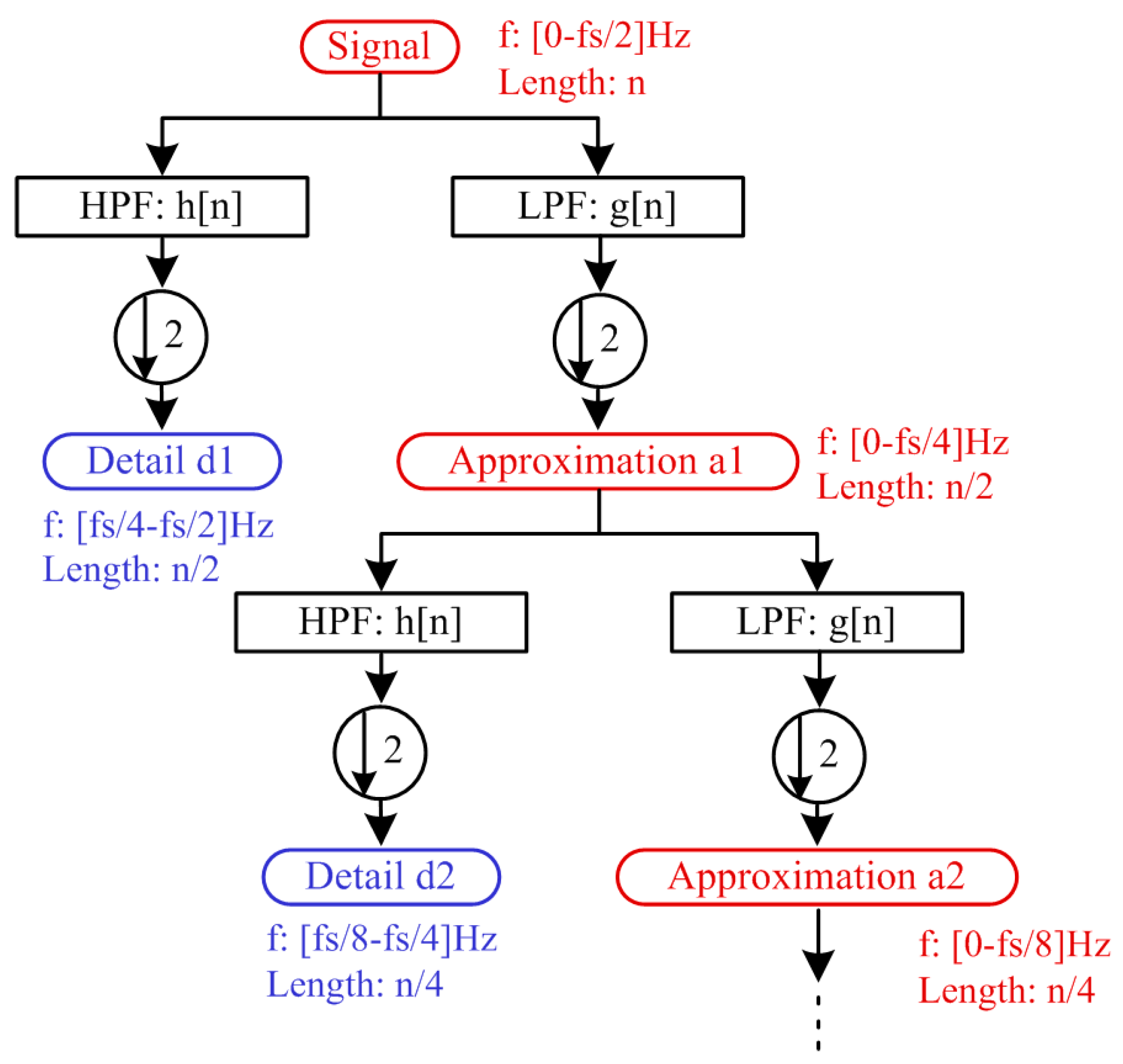
Figure 4 illustrates the dyadic wavelet decomposition algorithm regarding the coefficients of the transform at the different levels according to the description by [
25]. In this figure, the length of those coefficients and the frequency content at each level is shown, considering an original signal with a sampling rate of
samples/s.
The analysis of these signals reveals the time evolution of the components of the signal
which are contained within its corresponding frequency band. The approximation signal includes the low-frequency components of the signal, belonging to the interval:
More concretely, the detail contains the information concerning the signal components with frequencies included in the interval:
There are many different mother wavelet functions that are categorized based on their real type, such as the Coiflet wavelet, and their complex type, such as the Morlet wavelet. In fault detection algorithms, different types of mother wavelets have been used with satisfactory results [
26,
27]. In this work, the DWT of the motor start-up current has been performed using a fourth-order biorthogonal Coiflet wavelet. The sampling frequency used to capture the data in this research is 5000 samples/s. To define the suitable level of decomposition, the main signal of the motor current was initially decomposed into seven levels, where each level has its own range of frequencies.
Table 1 presents the frequency bands equivalent to each level. Clearly, the fundamental frequency is located in the frequency range corresponding to the detail of level six.
The qualitative pattern of LSH in the high decomposition level of the signals can be a good indicator for the fault detection, as shown in
Figure 5. Hence, the reconstructed signal that comes from the detail and approximation of level seven, and also the approximation of level six, is used as an input signal for calculating the fault-related feature. The relevant frequency bands of D7 (Detail of level seven), A7 (approximation of level seven) and A6 (approximation of level six) are shown in
Table 1. Accordingly, the features evaluated for monitoring BRB faults in LS-PMSM are based on these relevant frequency bands.
Entropy in information theory describes the amount of information provided by a signal or event. It relates the uncertainty of the signal or event associated with a given probability distribution. The concept of entropy has found broad applications in engineering, including, for instance, fault diagnoses [
28,
29,
30,
31]. A survey of recent methods for the fault diagnosis of rotating machinery using entropy techniques was discussed in [
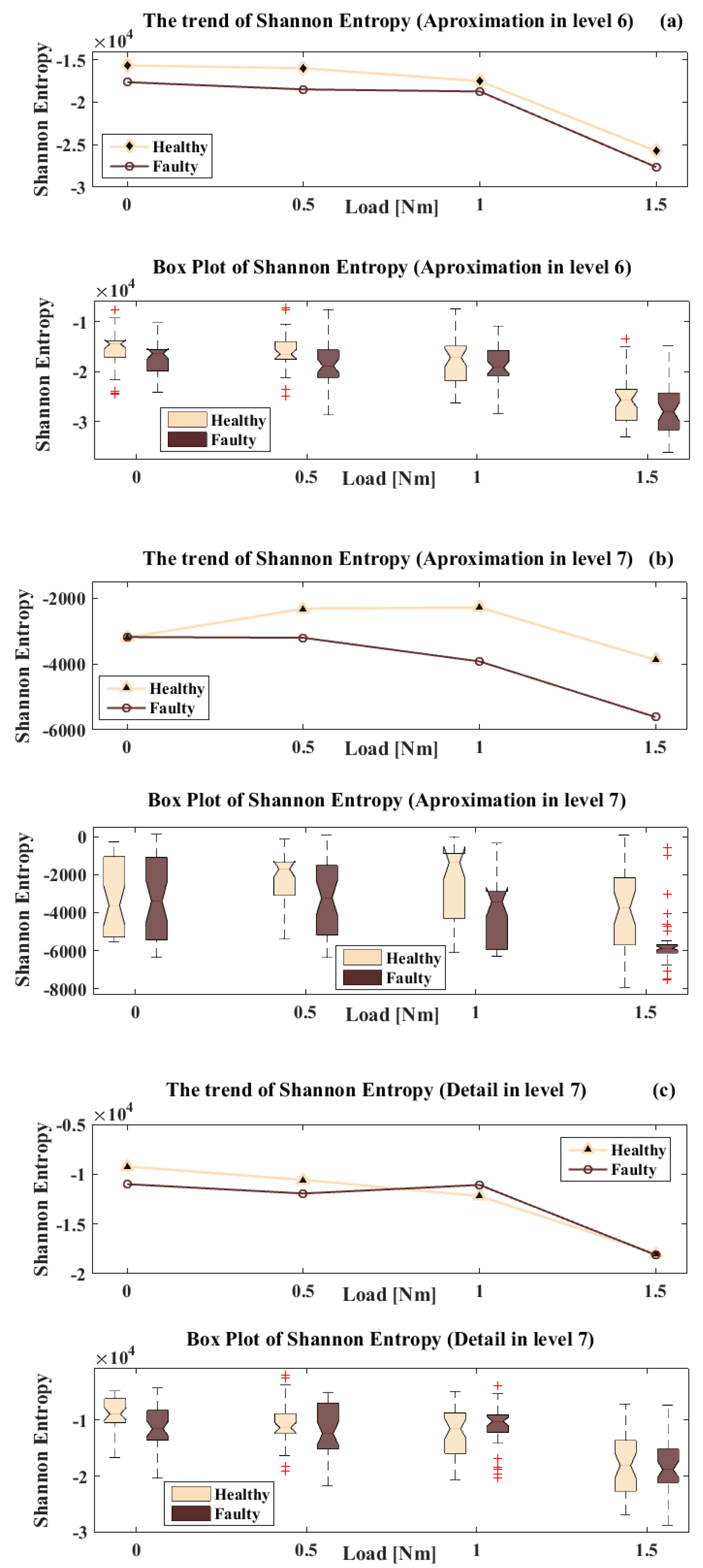
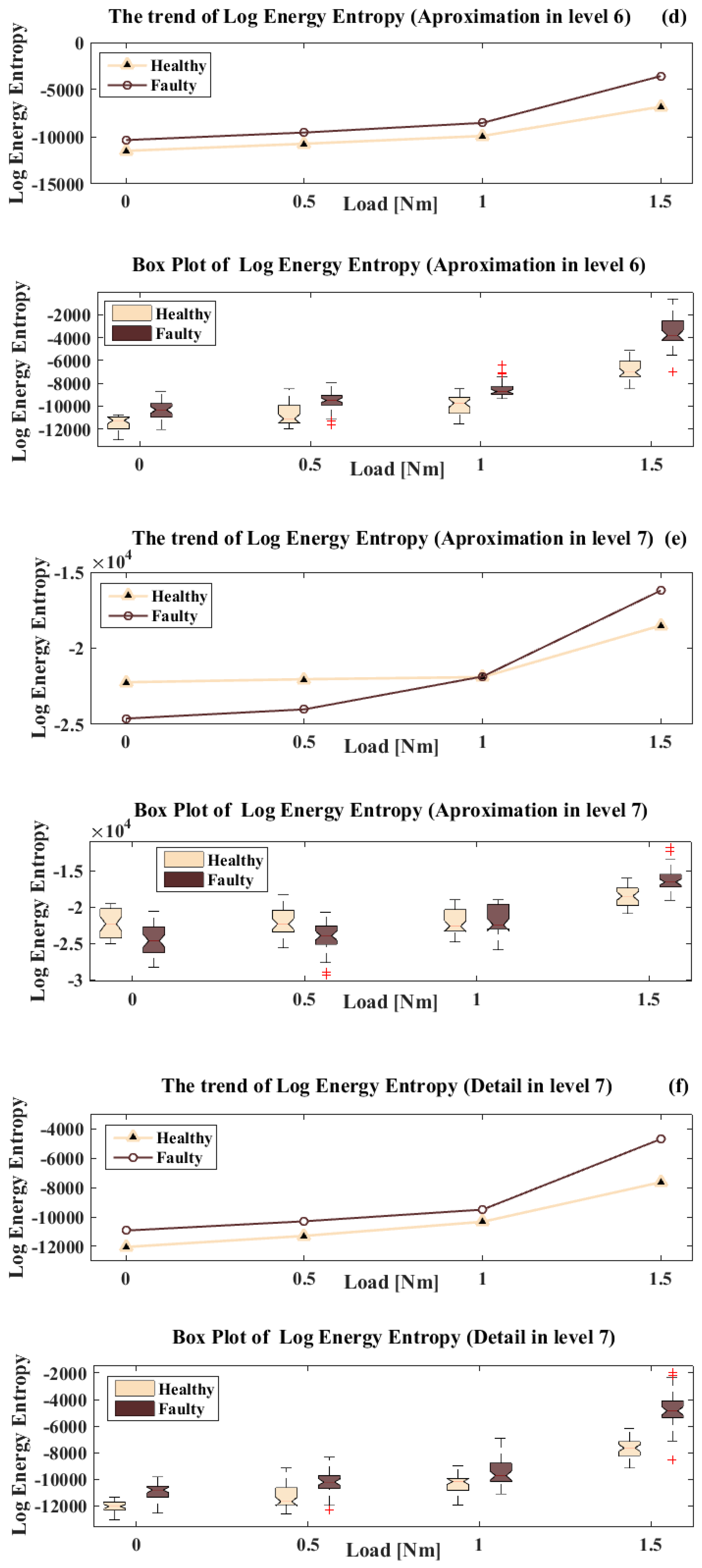
32]. According to these studies, tntropy has been used a feature for the diagnosis of a failure in electrical machines. The features used in this research are log-energy entropy and Shannon entropy. These two features are common concepts in many fields, mainly in signal processing, and are listed as bellow:
with the convention 0log(0) = 0.
with the convention log(0) = 0. where,
is the reconstructed signal from level
n.
Once the features are determined, statistical techniques should be used in exploratory data investigation. The movement of features is surveyed to discover the overlapping of healthy and faulty conditions at different levels of load. A number of methods have been implemented for visualizing and checking normality in multi-level experiments to provide a good understanding of the overall characteristics of the data. Thus, by listing all data with a multiplier, a boxplot can be used to check the assumption of normality. Boxplots, in this research, are considered to analyse and compare various features of parameter. The parameters investigated are two types of motor conditions, healthy and faulty, and four different stages of starting load are considered for each condition. The estimation of the statistical significance of differences was verified with a two-way Analysis of variance (ANOVA) based on the motor condition, the starting load, and their interaction. Tukey’s honest significant differences technique was also utilized for multiple comparisons after ANOVA. There are three sets of hypotheses should be tested with the two-way ANOVA in this research. The null hypotheses for each of the sets are given below:
The population means of the first factor (motor condition) are equal;
The population means of the second factor (load) are equal;
There is no interaction between the two factors (motor condition and load).
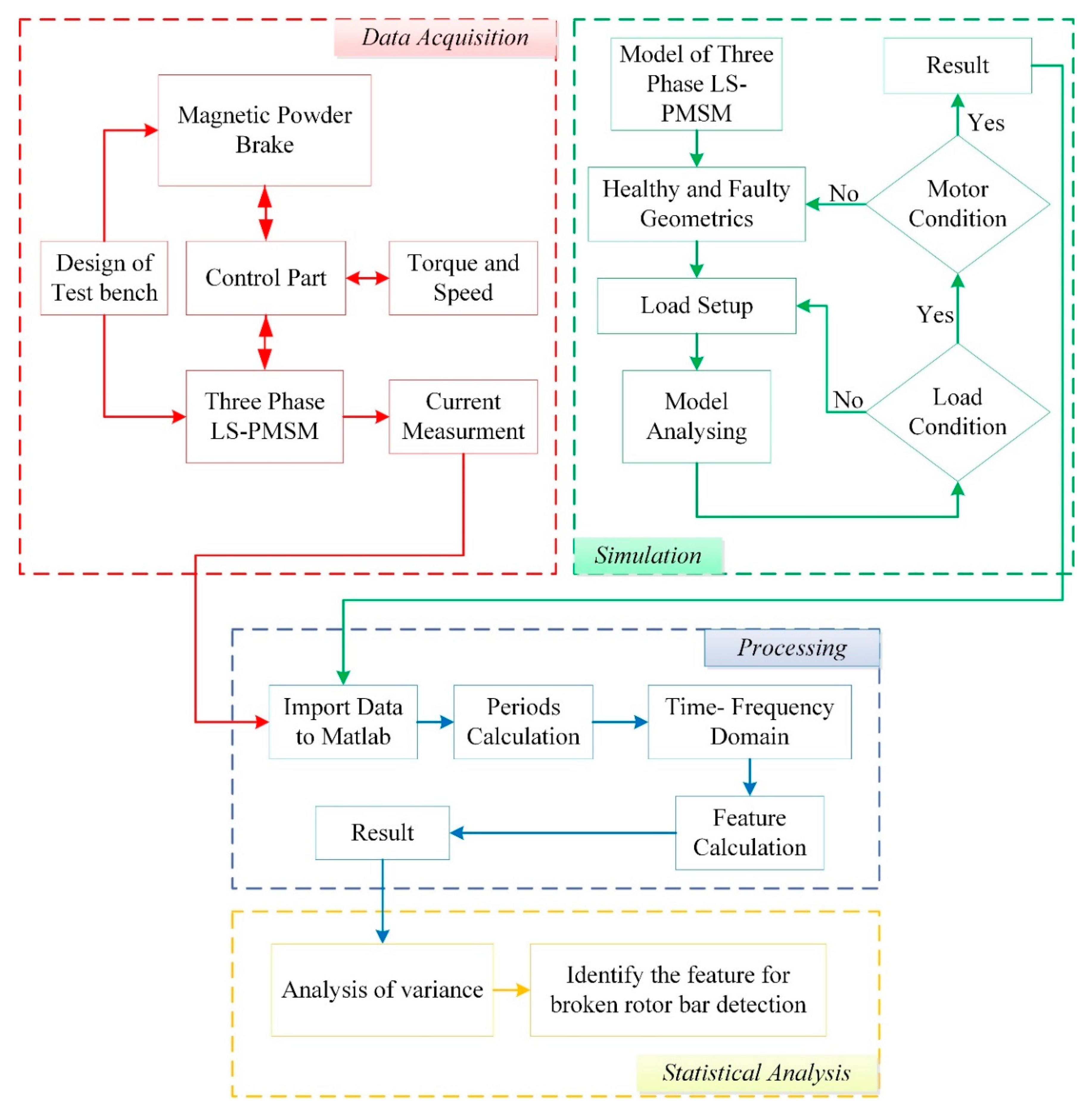
Accordingly, the most important point of current research is to identify the features related to BRB fault detection in LS-PMSM. A brief overview of the methodology employed for BRB detection in this research is depicted in
Figure 6. In this paper, the performance of LS-PMSM under BRB during transient operation is scrutinized employing the finite element method (FEM).

 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}