
Early Weed Detection Using Image Processing and Machine Learning Techniques in an Australian Chilli Farm

 ,
,  ,
,  , ,
, ,
Abstract
:1. Introduction
2. Literature Review on Machine Learning Algorithms for Weed Detection
3. Materials and Experimental Methods
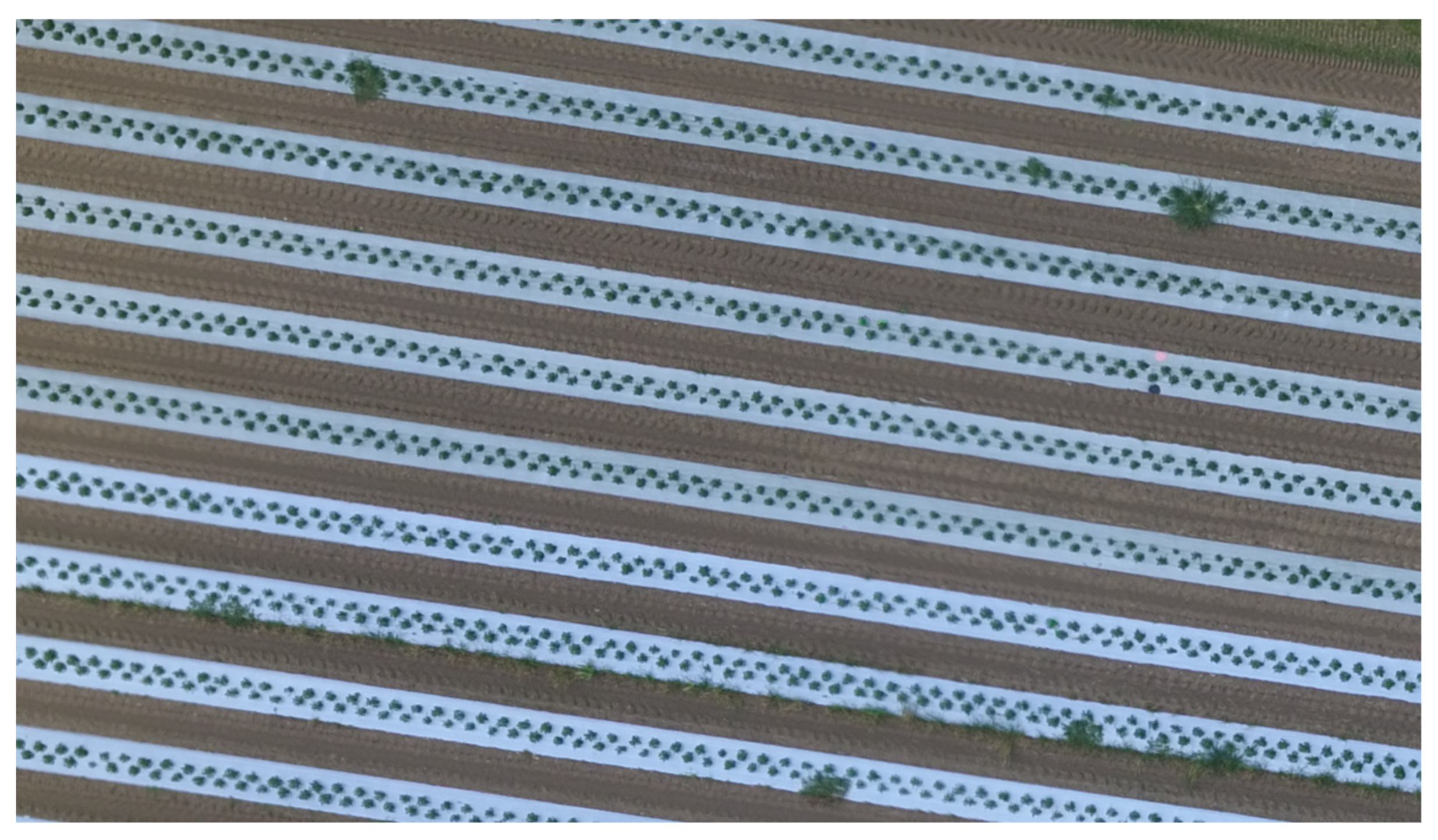
3.1. UAV Image Collection
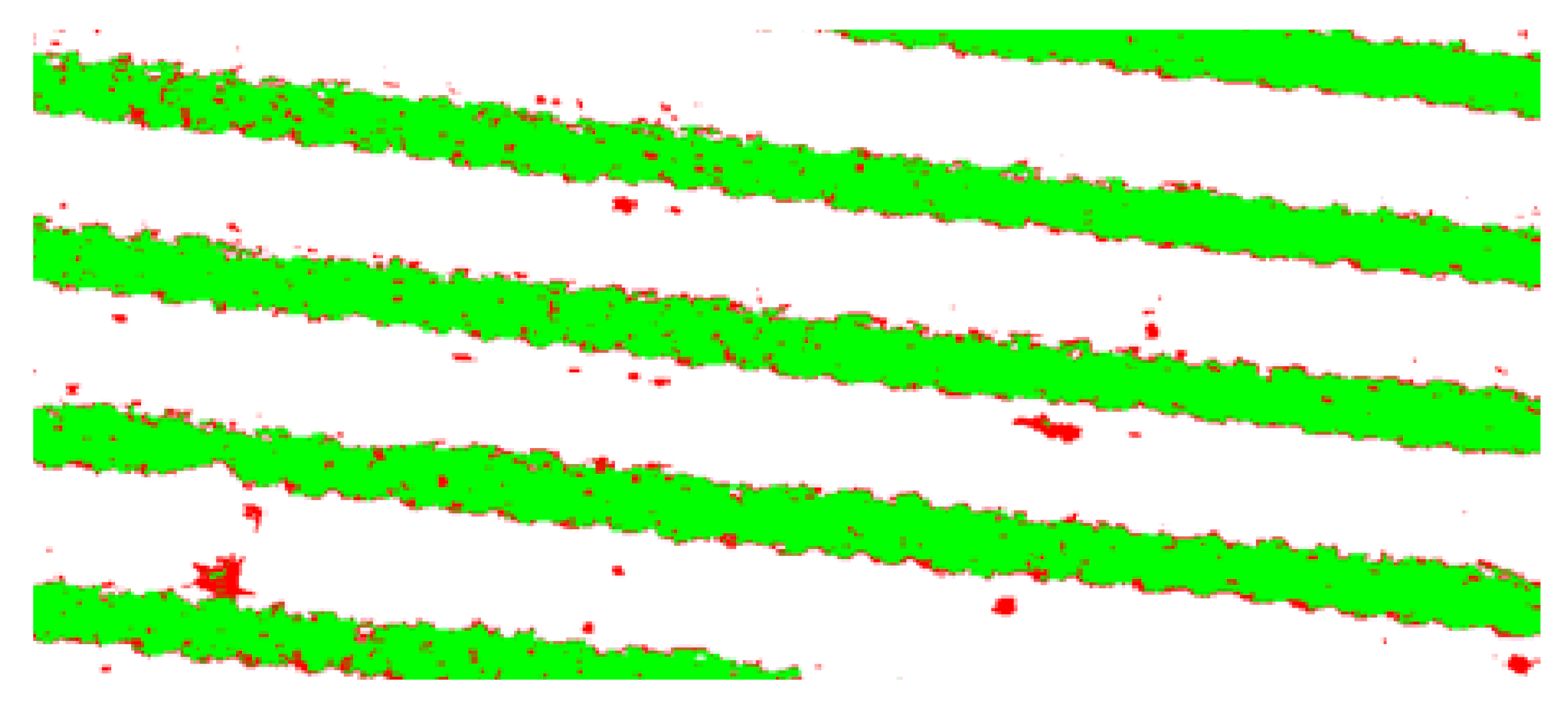
3.2. Image Preprocessing
3.3. The Extraction and Selection of Features from Images
3.4. Labelling the Images
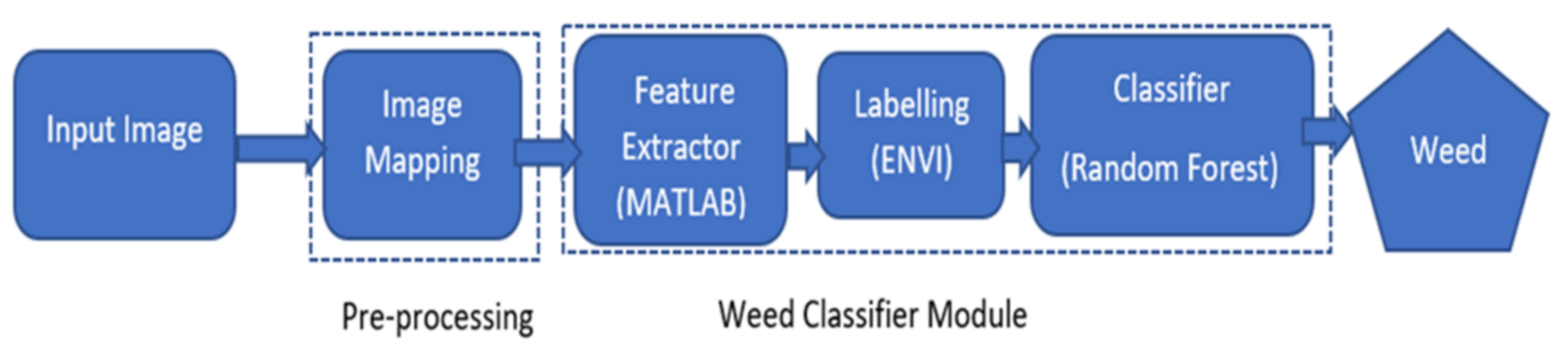
3.5. Machine Learning-Based Classification
- Random forest (RF) classifier: Breiman et al. [32] defined the RF as, “An ensemble of classification trees, where each decision tree employs a subset of training samples and variables selected by a bagging approach, while the remaining samples are used for internal cross-validation of the RF performance. The classifier chooses the membership classes having the most votes, for a given case.” RF has been proven to be highly suitable for high resolution UAV image classification and for agricultural mapping [3,4,5,13,21].
- Support vector machine (SVM) classifier: SVM classifies data points based on hyperplanes which optimally differentiate the classes based on training data [24,25]. These hyperplanes are the surfaces defined by combinations of input features. SVM has been popularly used in literature to perform weed and crop classification [22,23,24,25].
- K-nearest neighbours (KNN) classifier: KNN is a non-parametric algorithm, popularly used for regression and classification. The input consists of the k closest training examples in the feature space [33,34]. Kazmi et al. [26] used the KNN algorithm for creeping thistle detection in sugar beet fields.
3.6. Simulation Method and Parameters
- = True positive = number of records when weed is detected correctly.
- = True negative = number of records when crop and bare land is detected correctly.
- = False positive = number of records when weed is detected incorrectly.
- = False Negative = number of records when crop and bare land is detected incorrectly.
- P= Total positive = .
- N= Total negative = .
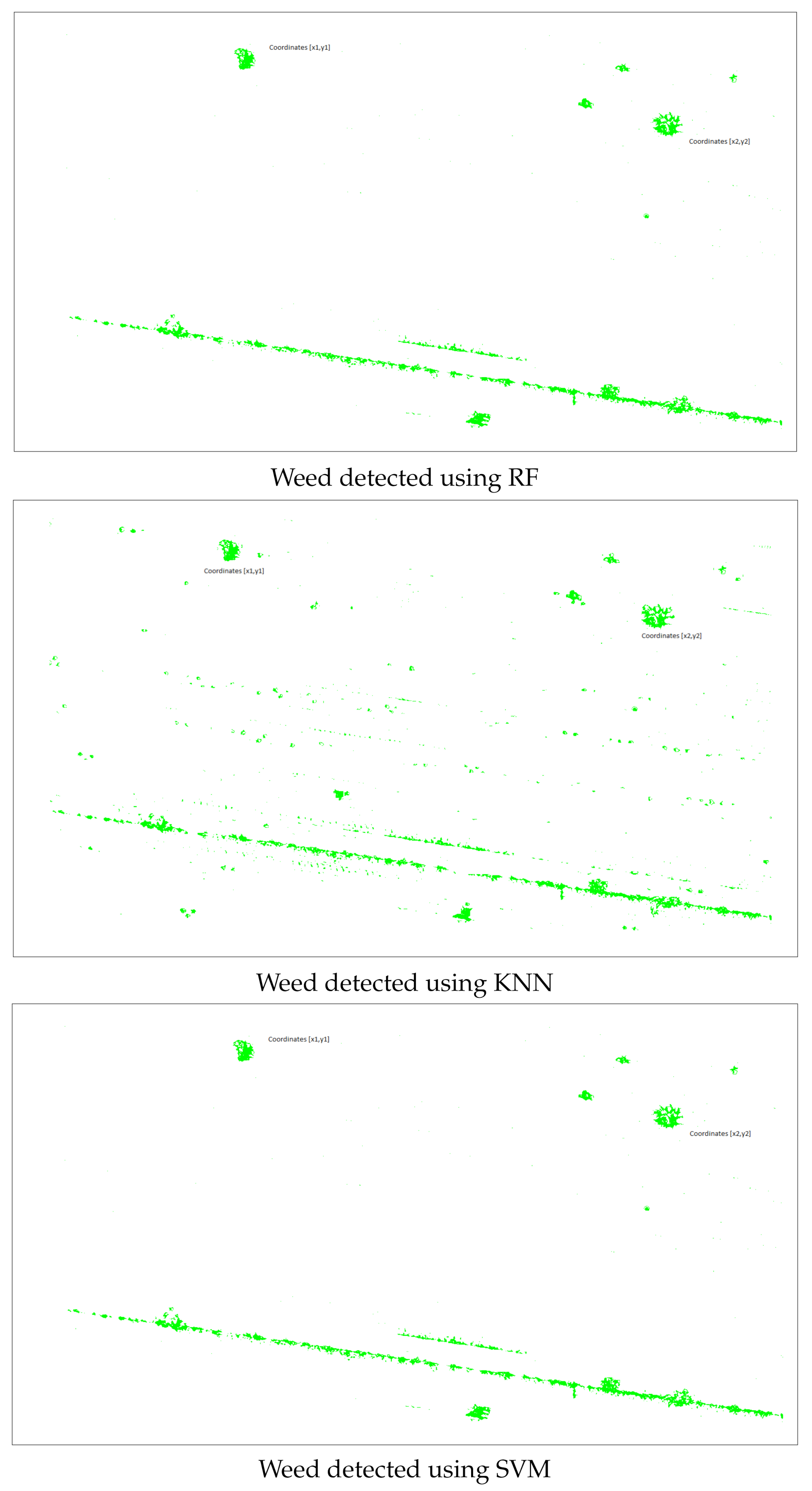
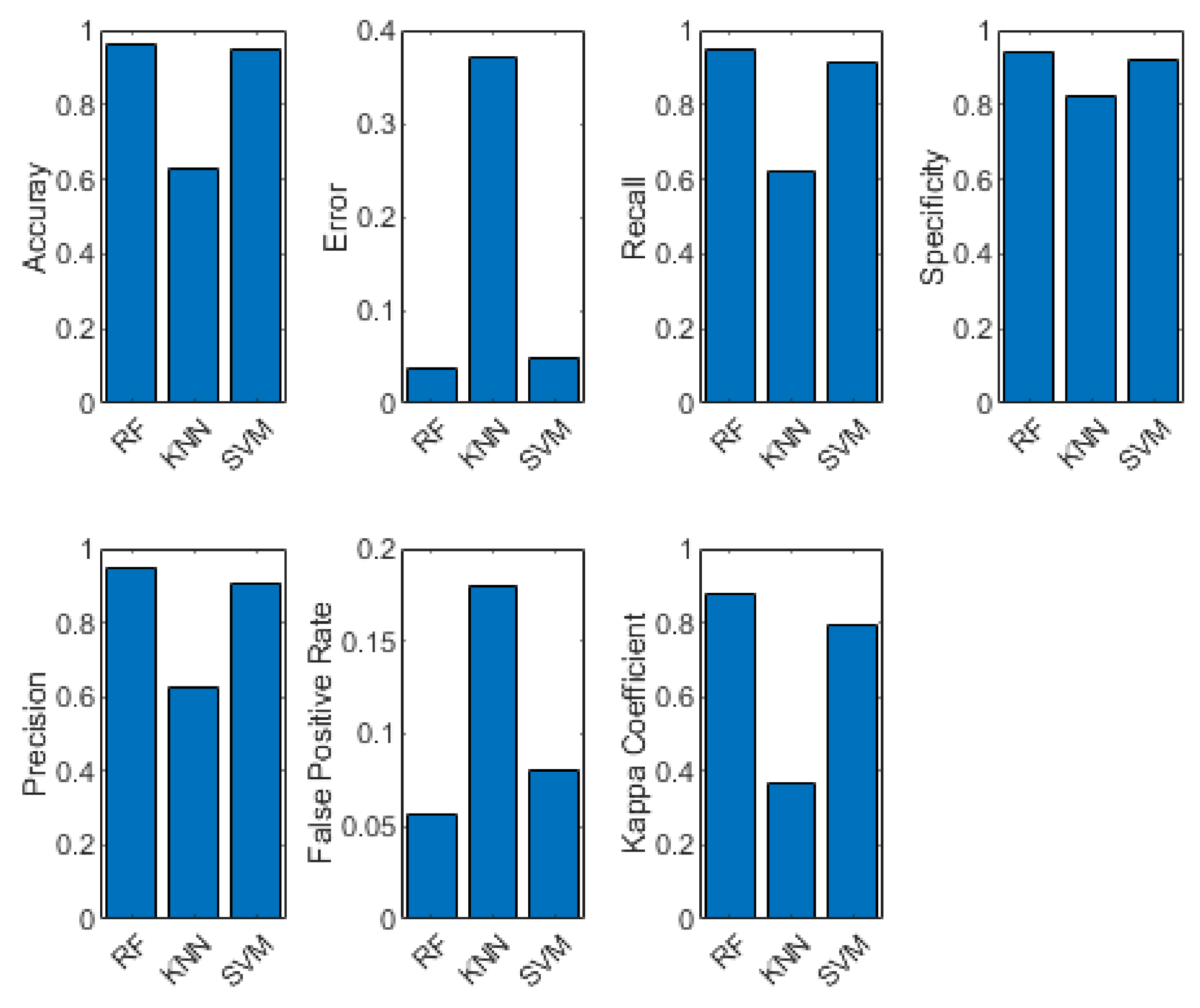
4. Simulation Results
Performance Analysis of RF, KNN and SVM
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| FPR | False positive rate |
| KNN | K-nearest neighbour |
| ML | Machine learning |
| NDVI | Normalised difference vegetation index |
| OBIA | Object based image analysis |
| RF | Random forest |
| SVM | Support vector machine |
| UAV | Unmanned aerial vehicle |
References
- Singh, A.; Ganapathysubramanian, B.; Singh, A.K.; Sarkar, S. Machine Learning for High-Throughput Stress Phenotyping in Plants. Trends Plant Sci. 2016, 21, 110–124. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dadashzadeh, M.; Abbaspour-Gilandeh, Y.; Mesri-Gundoshmian, T.; Sabzi, S.; Hernández-Hernández, J.L.; Hernández-Hernández, M.; Arribas, J.I. Weed Classification for Site-Specific Weed Management Using an Automated Stereo Computer-Vision Machine-Learning System in Rice Fields. Plants 2020, 9, 559. [Google Scholar] [CrossRef] [PubMed]
- Alam, M.; Alam, M.S.; Roman, M.; Tufail, M.; Khan, M.U.; Khan, M.T. Real-Time Machine-Learning Based Crop/Weed Detection and Classification for Variable-Rate Spraying in Precision Agriculture. In Proceedings of the 2020 7th International Conference on Electrical and Electronics Engineering (ICEEE), Antalya, Turkey, 14–16 April 2020; pp. 273–280. [Google Scholar]
- Tu, Y.H.; Johansen, K.; Phinn, S.; Robson, A. Measuring canopy structure and condition using multi-spectral UAS imagery in a horticultural environment. Remote Sens. 2019, 11, 269. [Google Scholar] [CrossRef] [Green Version]
- Gao, J.; Nuyttens, D.; Lootens, P.; He, Y.; Pieters, J.G. Recognising weeds in a maize crop using a random forest machine-learning algorithm and near-infrared snapshot mosaic hyperspectral imagery. Biosyst. Eng. 2018, 170, 39–50. [Google Scholar] [CrossRef]
- Myers, S.S.; Smith, M.R.; Guth, S.; Golden, C.D.; Vaitla, B.; Mueller, N.D.; Dangour, A.D.; Huybers, P. Climate change and global food systems: Potential impacts on food security and undernutrition. Annu. Rev. Public Health 2017, 38, 259–277. [Google Scholar] [CrossRef]
- Aharon, S.; Peleg, Z.; Argaman, E.; Ben-David, R.; Lati, R.N. Image-Based High-Throughput Phenotyping of Cereals Early Vigor and Weed-Competitiveness Traits. Remote Sens. 2020, 12, 3877. [Google Scholar] [CrossRef]
- Herrmann, I.; Bdolach, E.; Montekyo, Y.; Rachmilevitch, S.; Townsend, P.A.; Karnieli, A. Assessment of maize yield and phenology by drone-mounted superspectral camera. Precis. Agric. 2020, 21, 51–76. [Google Scholar] [CrossRef]
- Kawamura, K.; Asai, H.; Yasuda, T.; Soisouvanh, P.; Phongchanmixay, S. Discriminating crops/weeds in an upland rice field from UAV images with the SLIC-RF algorithm. Plant Prod. Sci. 2020, 1–18. [Google Scholar] [CrossRef]
- Zisi, T.; Alexandridis, T.K.; Kaplanis, S.; Navrozidis, I.; Tamouridou, A.A.; Lagopodi, A.; Moshou, D.; Polychronos, V. Incorporating surface elevation information in UAV multispectral images for mapping weed patches. J. Imaging 2018, 4, 132. [Google Scholar] [CrossRef] [Green Version]
- Islam, N.; Rashid, M.M.; Pasandideh, F.; Ray, B.; Moore, S.; Kadel, R. A Review of Applications and Communication Technologies for Internet of Things (IoT) and Unmanned Aerial Vehicle (UAV) Based Sustainable Smart Farming. Sustainability 2021, 13, 1821. [Google Scholar] [CrossRef]
- Islam, N.; Rashid, M.M.; Wibowo, S.; Wasimi, S.; Morshed, A.; Xu, C. Machine learning based approach for Weed Detection in Chilli field using RGB images. In Proceedings of the 16th International Conference on Fuzzy Systems and Knowledge Discovery (FSKD), Xi’an, China, 19–21 December 2020. [Google Scholar]
- De Castro, A.I.; Torres-Sánchez, J.; Peña, J.M.; Jiménez-Brenes, F.M.; Csillik, O.; López-Granados, F. An automatic random forest-OBIA algorithm for early weed mapping between and within crop rows using UAV imagery. Remote Sens. 2018, 10, 285. [Google Scholar] [CrossRef] [Green Version]
- Etienne, A.; Saraswat, D. Machine learning approaches to automate weed detection by UAV based sensors. In Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping IV; International Society for Optics and Photonics: Bellingham, WA, USA, 2019; Volume 11008, p. 110080R. [Google Scholar]
- Ronay, I.; Ephrath, J.E.; Eizenberg, H.; Blumberg, D.G.; Maman, S. Hyperspectral Reflectance and Indices for Characterizing the Dynamics of Crop–Weed Competition for Water. Remote Sens. 2021, 13, 513. [Google Scholar] [CrossRef]
- Tian, H.; Wang, T.; Liu, Y.; Qiao, X.; Li, Y. Computer vision technology in agricultural automation—A review. Inf. Process. Agric. 2020, 7, 1–19. [Google Scholar] [CrossRef]
- Wang, A.; Zhang, W.; Wei, X. A review on weed detection using ground-based machine vision and image processing techniques. Comput. Electron. Agric. 2019, 158, 226–240. [Google Scholar] [CrossRef]
- Herrmann, I.; Shapira, U.; Kinast, S.; Karnieli, A.; Bonfil, D. Ground-level hyperspectral imagery for detecting weeds in wheat fields. Precis. Agric. 2013, 14, 637–659. [Google Scholar] [CrossRef]
- Weis, M.; Gutjahr, C.; Ayala, V.R.; Gerhards, R.; Ritter, C.; Schölderle, F. Precision farming for weed management: Techniques. Gesunde Pflanz. 2008, 60, 171–181. [Google Scholar] [CrossRef]
- Liakos, K.G.; Busato, P.; Moshou, D.; Pearson, S.; Bochtis, D. Machine learning in agriculture: A review. Sensors 2018, 18, 2674. [Google Scholar] [CrossRef] [Green Version]
- Chabot, D.; Dillon, C.; Shemrock, A.; Weissflog, N.; Sager, E.P. An object-based image analysis workflow for monitoring shallow-water aquatic vegetation in multispectral drone imagery. ISPRS Int. J. Geo-Inf. 2018, 7, 294. [Google Scholar] [CrossRef] [Green Version]
- Brinkhoff, J.; Vardanega, J.; Robson, A.J. Land Cover Classification of Nine Perennial Crops Using Sentinel-1 and-2 Data. Remote Sens. 2020, 12, 96. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Guo, J.; Wang, Z. Combing K-means Clustering and Local Weighted Maximum Discriminant Projections for Weed Species Recognition. Front. Comput. Sci. 2019, 1, 4. [Google Scholar] [CrossRef]
- Bakhshipour, A.; Jafari, A. Evaluation of support vector machine and artificial neural networks in weed detection using shape features. Comput. Electron. Agric. 2018, 145, 153–160. [Google Scholar] [CrossRef]
- Abouzahir, S.; Sadik, M.; Sabir, E. Enhanced Approach for Weeds Species Detection Using Machine Vision. In Proceedings of the 2018 International Conference on Electronics, Control, Optimization and Computer Science (ICECOCS), Kenitra, Morocco, 5–6 December 2018; pp. 1–6. [Google Scholar]
- Kazmi, W.; Garcia-Ruiz, F.J.; Nielsen, J.; Rasmussen, J.; Andersen, H.J. Detecting creeping thistle in sugar beet fields using vegetation indices. Comput. Electron. Agric. 2015, 112, 10–19. [Google Scholar] [CrossRef] [Green Version]
- Pérez-Ortiz, M.; Peña, J.M.; Gutiérrez, P.A.; Torres-Sánchez, J.; Hervás-Martínez, C.; López-Granados, F. Selecting patterns and features for between-and within-crop-row weed mapping using UAV-imagery. Expert Syst. Appl. 2016, 47, 85–94. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, F.; Al-Mamun, H.A.; Bari, A.H.; Hossain, E.; Kwan, P. Classification of crops and weeds from digital images: A support vector machine approach. Crop Prot. 2012, 40, 98–104. [Google Scholar] [CrossRef]
- Lameski, P.; Zdravevski, E.; Trajkovik, V.; Kulakov, A. Weed detection dataset with rgb images taken under variable light conditions. In Proceedings of the International Conference on ICT Innovations, Skopje, Macedonia, 18–23 September 2017; pp. 112–119. [Google Scholar]
- Hung, C.; Xu, Z.; Sukkarieh, S. Feature learning based approach for weed classification using high resolution aerial images from a digital camera mounted on a UAV. Remote Sens. 2014, 6, 12037–12054. [Google Scholar] [CrossRef] [Green Version]
- Andújar, D.; Weis, M.; Gerhards, R. An ultrasonic system for weed detection in cereal crops. Sensors 2012, 12, 17343–17357. [Google Scholar] [CrossRef] [PubMed]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Suomela, P. Construction of Nearest Neighbour Systems; Suomalainen Tiedeakatemia: Helsinki, Finland, 1976. [Google Scholar]
- Feyaerts, F.; Van Gool, L. Multi-spectral vision system for weed detection. Pattern Recognit. Lett. 2001, 22, 667–674. [Google Scholar] [CrossRef]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Gupta, D.; Malviya, A.; Singh, S. Performance analysis of classification tree learning algorithms. Int. J. Comput. Appl. 2012, 55, 39–44. [Google Scholar]
- Kandhasamy, J.P.; Balamurali, S. Performance analysis of classifier models to predict diabetes mellitus. Procedia Comput. Sci. 2015, 47, 45–51. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Year | Problem Definition | Targeted Crop | Dataset | Model/Tools | Accuracy |
|---|---|---|---|---|---|---|
| Alam et al. [3] | 2020 | Crop/weed detection and classification | Unspecified | Images were collected from private farm | RF | 95% |
| Brinkhoff et al. [22] | 2020 | Land cover mapping | 9 perennial crops | Images were taken from the Riverina region in NSW, Australia | SVM | 84.8% |
| Aaron et al. [14] | 2019 | Weed detection by UAV | Maize | Images were collected from private farm | NVDI digit, YOLOv3 Detector | 98% |
| Zhang et al. [23] | 2019 | Weeds species recognition | 8 weed plants | 1600 weed images were taken from South China crop field | SVM | 92.35% |
| Y-H Tu et al. [4] | 2019 | Measuring Canopy structure | Avocado tree | Avocado field Bundaberg, Australia | RF | 96% |
| Adel et al. [24] | 2018 | Weed detection using shape feature | Sugar beet | Images were taken Shiraz University, Iran | SVM | 95% |
| Abouzahir et al. [25] | 2018 | Weeds species detection | Soybean | Images were collected from Sâa José farm, Brazil | SVM | 95.07% |
| J Gao et al. [5] | 2018 | Weeds recognition | Maize | Images were taken from crop field of Belgium | RF, KNN | 81% 76.95% |
| Castro et al [13] | 2018 | Early Weed mapping | Sunflower, cotton | Images were taken from crop field of Spain | RF | 87.9% |
| D Chabot et al. [21] | 2018 | Monitoring water aquatic vegetation | Stratiotes aloides | Trent-Severn Waterway in Ontario, Canada | RF | 92.19% |
| Maria et al. [27] | 2016 | weed mapping using UAV-imagery | Sunflower, maize | Images were collected from private farm | SVM | 95.5% |
| Faisal et al. [28] | 2012 | Classification of crops and weed | Chilli | Images were Collected chilli field | SVM | 97% |
| Vegetation Index | Formula |
|---|---|
| Normalised red band | |
| Normalised green band | |
| Normalised blue band | |
| Greenness Index | |
| Excess green | |
| Excess red | |
| Excess green and red |
| Performance Metric | RF | KNN | SVM |
|---|---|---|---|
| Accuracy | 0.96 | 0.63 | 0.94 |
| Recall/Sensitivity | 0.95 | 0.62 | 0.91 |
| Specificity | 0.89 | 0.81 | 0.89 |
| Precision | 0.95 | 0.62 | 0.91 |
| False Positive Rate | 0.06 | 0.18 | 0.08 |
| Kappa coefficient | 0.88 | 0.36 | 0.83 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Islam, N.; Rashid, M.M.; Wibowo, S.; Xu, C.-Y.; Morshed, A.; Wasimi, S.A.; Moore, S.; Rahman, S.M. Early Weed Detection Using Image Processing and Machine Learning Techniques in an Australian Chilli Farm. Agriculture 2021, 11, 387. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11050387
Islam N, Rashid MM, Wibowo S, Xu C-Y, Morshed A, Wasimi SA, Moore S, Rahman SM. Early Weed Detection Using Image Processing and Machine Learning Techniques in an Australian Chilli Farm. Agriculture. 2021; 11(5):387. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11050387
Chicago/Turabian StyleIslam, Nahina, Md Mamunur Rashid, Santoso Wibowo, Cheng-Yuan Xu, Ahsan Morshed, Saleh A. Wasimi, Steven Moore, and Sk Mostafizur Rahman. 2021. "Early Weed Detection Using Image Processing and Machine Learning Techniques in an Australian Chilli Farm" Agriculture 11, no. 5: 387. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11050387